Downloaded 331 times


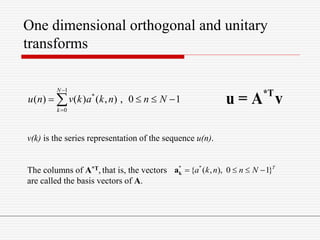






![Properties of Unitary Transforms
Energy compaction
Unitary transforms pack a large fraction of the
average energy of the image into a relatively
few components of the transform coefficients.
i.e. many of the transform coefficients contain
very little energy.
Decorrelation
When the input vector elements are highly
correlated, the transform coefficients tend to be
uncorrelated.
Covariance matrix E[ ( y – E(y) ) ( y – E(y) )*T ].
small correlation implies small off-diagonal terms.](https://image.slidesharecdn.com/unitii-140624081014-phpapp02/85/Unit-ii-13-320.jpg)
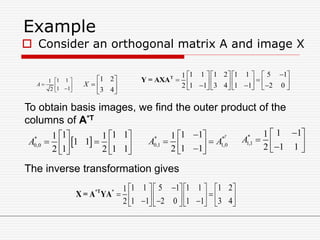
![DFT Properties
Circular shift u(n-l)c = x[(n-l)mod N]
The DFT and unitary DFT matrices are
symmetric i.e. F-1 = F*
DFT of length N can be implemented by a fast
algorithm in O(N log2N) operations.
DFT of a real sequence {x(n), n=0,…,N-1} is
conjugate symmetric about N/2.
i.e. y*(N-k) = y(k)](https://image.slidesharecdn.com/unitii-140624081014-phpapp02/85/Unit-ii-15-320.jpg)







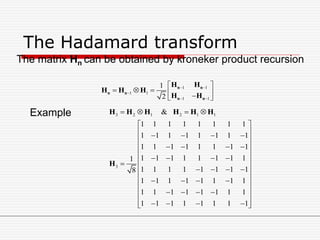

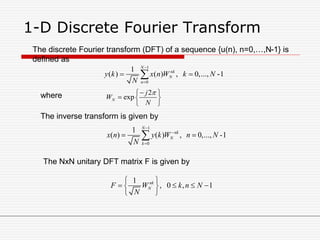
![The Haar transform
The Haar functions hk(x) are defined on a continuous
interval, x [0,1], and for k = 0,…,N-1, where N = 2n.
The integer k can be uniquely decomposed as k = 2p + q -1
where 0 ≤ p ≤ n-1; q=0,1 for p=0 and 1 ≤ q ≤ 2p for p≠0. For
example, when, N=4
k 0 1 2 3
p 0 0 1 1
q 0 1 1 2](https://image.slidesharecdn.com/unitii-140624081014-phpapp02/85/Unit-ii-30-320.jpg)
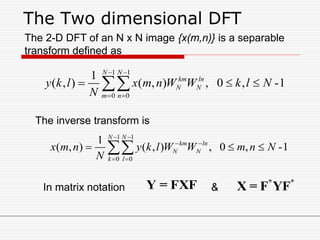
![The Haar transform
•The Haar functions are defined as
0 0,0
/ 2
/ 2
,
1
( ) ( ) , [0,1]
1
1 22 ,
2 2
1
1 2( ) 2 ,
2 2
0, [0,1]
p
p p
p
k p q p p
h x h x x
N
q
q
x
q
q
h x h x
N
otherwise for x
](https://image.slidesharecdn.com/unitii-140624081014-phpapp02/85/Unit-ii-31-320.jpg)








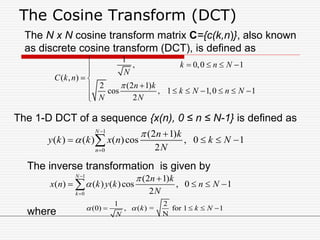
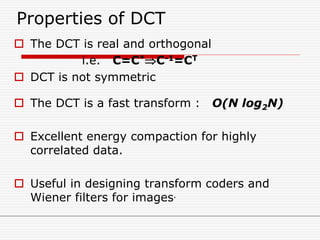
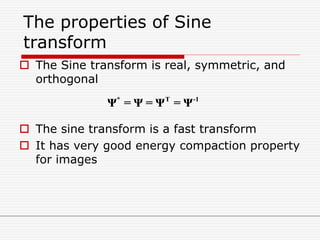
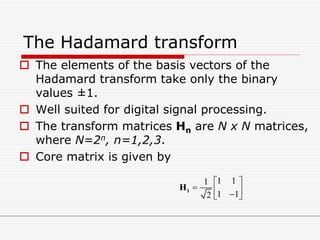
The document discusses various image transforms. It begins by explaining why transforms are used, such as for fast computation and obtaining conceptual insights. It then introduces image transforms as unitary matrices that represent images using a discrete set of basis images. It proceeds to describe one-dimensional orthogonal and unitary transforms using matrices. It also discusses separable two-dimensional transforms and provides properties of unitary transforms such as energy conservation. Specific transforms discussed in more detail include the discrete Fourier transform, discrete cosine transform, discrete sine transform, and Hadamard transform.