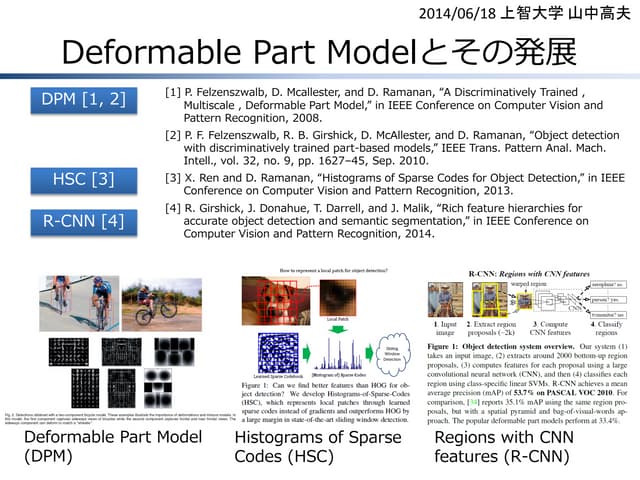
PointNet
5
Qi, C.R., Su, H., Mo, K., & Guibas, L. J. (2017). PointNet : Deep
Learning on Point Sets for 3D Classification and Segmentation
Big Data + Deep Representation Learning. IEEE Conference on
ComputerVision and Pattern Recognition (CVPR).
各点群の点を独立に畳み込む
Global Max Poolingで点群全体の特徴量を取得
各点を個別
に畳み込み
アフィン変換
各点の特徴を統合
6.
PointNet++
6
Qi, C.R.,Yi, L., Su, H., & Guibas, L. J. (2017). PointNet++: Deep
Hierarchical Feature Learning on Point Sets in a Metric Space.
Conference on Neural Information Processing Systems (NIPS).
PointNetを階層的に適用
点群をクラスタ分割→PointNet→クラスタ内で統合を繰り返す
CVPR2018で紹介された点群畳み込み研究
14
1. Hua, B.-S.,Tran,M.-K., &Yeung, S.-K.“Pointwise Convolutional Neural
Networks”
2. Le,T., & Duan,Y. “PointGrid:A Deep Network for 3D Shape
Understanding”
3. Huang, Q.,Wang,W., & Neumann,“U. Recurrent Slice Networks for 3D
Segmentation of Point Clouds”
4. Li, J., Chen, B. M., & Lee, G. H.“SO-Net: Self-Organizing Network for
Point Cloud Analysis”
5. Shen,Y., Feng, C.,Yang,Y., &Tian, D.“Mining Point Cloud Local Structures
by Kernel Correlation and Graph Pooling”
6. Liu, S., Xie, S., Chen, Z., &Tu, Z.“Attentional ShapeContextNet for Point
Cloud Recognition”
7. Tatarchenko, M., Park, J., Koltun,V., & Zhou, Q. “Tangent convolutions for
dense prediction in 3D”
8. Wang, S., Suo, S., Ma,W., & Urtasun, R. “Deep Parametric Continuous
Convolutional Neural Networks”
9. Su, H., Jampani,V., Sun, D., Maji, S., Kalogerakis, E.,Yang, M.-H., & Kautz, J.
“SPLATNet: Sparse Lattice Networks for Point Cloud Processing”




















![8. Deep Parametric Continuous
Convolutional Neural Networks
カーネルを離散ではなく、パラメトリックな連続関数として表現
(ここではMulti-Layer Perceptron)
任意の構造の入力に対して、任意の個所の出力が計算可能
ℎ 𝑛 =
𝑚=−𝑀
𝑀
𝑓 𝑛 − 𝑚 𝑔[𝑚] ℎ 𝒙 = න
−∞
∞
𝑓 𝒚 𝑔 𝒙 − 𝒚 ⅆ𝑦 ≈
𝑖
𝑁
1
𝑁
𝑓 𝒚𝑖 𝑔(𝒙 − 𝒚𝑖)
連続カーネル離散カーネル](https://image.slidesharecdn.com/20180707splatnet-180707065736/85/CVPR2018-PointCloud-CNN-SPLATNet-22-320.jpg)




![Permutohedral Lattice
27
D次元空間上の点を、原点を通り法線が𝐧 = [1, ⋯ , 1]と
なる(D-1)次元平面上の格子点で表現
Adams,A., Baek, J., & Davis, M.A. (2010). Fast high-dimensional filtering using the permutohedral
lattice. Computer Graphics Forum](https://image.slidesharecdn.com/20180707splatnet-180707065736/85/CVPR2018-PointCloud-CNN-SPLATNet-27-320.jpg)




























![[DL輪読会]Vision Transformer with Deformable Attention (Deformable Attention Tra...](https://cdn.slidesharecdn.com/ss_thumbnails/dl0114-220114032933-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]NVAE: A Deep Hierarchical Variational Autoencoder](https://cdn.slidesharecdn.com/ss_thumbnails/nvaeadeephierarchicalvariationalautoencoder-201113004930-thumbnail.jpg?width=640&height=640&fit=bounds)














![[DL輪読会]Encoder-Decoder with Atrous Separable Convolution for Semantic Image S...](https://cdn.slidesharecdn.com/ss_thumbnails/deeplabv3-180309001425-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Objects as Points](https://cdn.slidesharecdn.com/ss_thumbnails/20190614centernetkuboshizuma-190614004246-thumbnail.jpg?width=640&height=640&fit=bounds)

![SSII2021 [OS2-02] 深層学習におけるデータ拡張の原理と最新動向](https://cdn.slidesharecdn.com/ss_thumbnails/os2-03latest-210610045610-thumbnail.jpg?width=640&height=640&fit=bounds)
![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Focal Loss for Dense Object Detection](https://cdn.slidesharecdn.com/ss_thumbnails/focalloss-180208092846-thumbnail.jpg?width=640&height=640&fit=bounds)