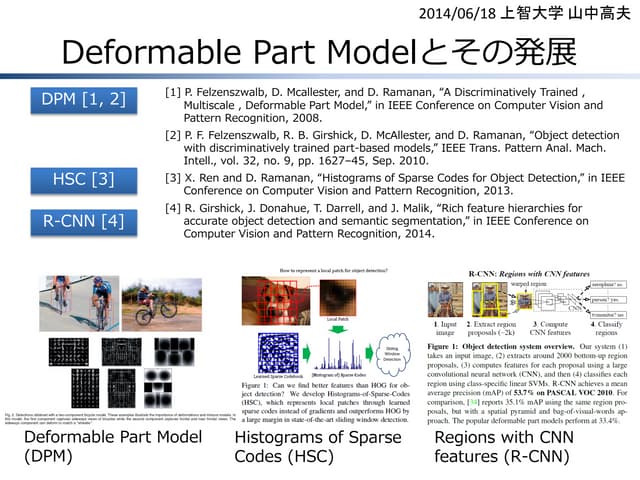
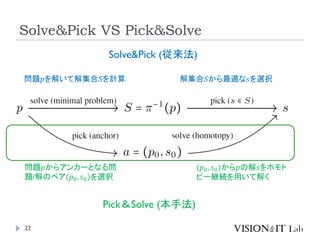
2022/08/07に開催された第11回全日本コンピュータビジョン勉強会「CVPR2022読み会」(前編)で発表した資料です。 https://kantocv.connpass.com/event/253622/








![Scrantonアルゴリズム
11
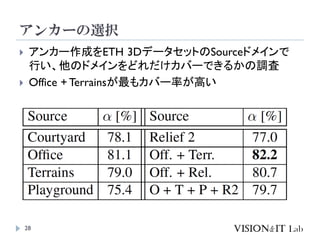
4点中任意の2点𝑘、𝑚を選択し、距離を比較
𝜆1,1 = 1の制約をパラメータ𝑙で緩和
𝜆𝑘,1𝑣𝑘,1 − 𝜆𝑚,1𝑣𝑚,1
2
= 𝜆𝑘,2𝑣𝑘,2 − 𝜆𝑚,2𝑣𝑚,2
2
𝑣1,1 + 𝑙[0; 1; 0] − 𝜆𝑚,1𝑣𝑚,1
2
= 𝜆1,2𝑣1,2 − 𝜆𝑚,2𝑣𝑚,2
2
272個程度の幾何学的にも整合性の取れた似の解が現れる](https://image.slidesharecdn.com/hardminimalproblems-220807131827-873fb2b2/85/Learning-to-Solve-Hard-Minimal-Problems-11-320.jpg)



























![[DL輪読会]MetaFormer is Actually What You Need for Vision](https://cdn.slidesharecdn.com/ss_thumbnails/20220121metaformer-220121085750-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Pay Attention to MLPs (gMLP)](https://cdn.slidesharecdn.com/ss_thumbnails/kobayashi-210528032327-thumbnail.jpg?width=640&height=640&fit=bounds)






![[cvpaper.challenge] 超解像メタサーベイ #meta-study-group勉強会](https://cdn.slidesharecdn.com/ss_thumbnails/metastudysr-190314071853-thumbnail.jpg?width=640&height=640&fit=bounds)






![[DL輪読会]Convolutional Conditional Neural Processesと Neural Processes Familyの紹介](https://cdn.slidesharecdn.com/ss_thumbnails/20191220readingpaperconvcnp-191220034420-thumbnail.jpg?width=640&height=640&fit=bounds)




![SSII2022 [SS2] 少ないデータやラベルを効率的に活用する機械学習技術 〜 足りない情報をどのように補うか?〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss2ssii2022-220607054716-2760bd30-thumbnail.jpg?width=640&height=640&fit=bounds)