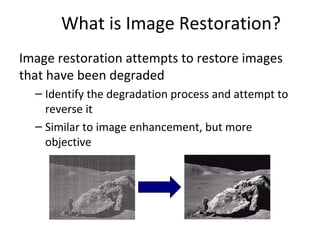
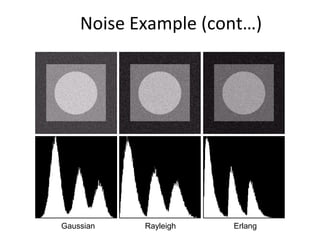
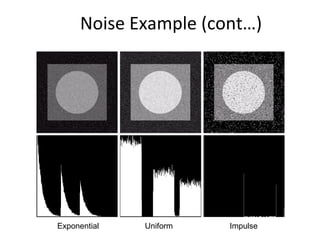
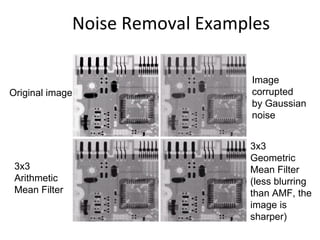
This document discusses image restoration and reconstruction techniques for noise removal. It begins by defining image restoration as attempting to reverse degradation processes to restore degraded images. Various noise models are described, including Gaussian, Rayleigh, Erlang, exponential, uniform, and impulse noise. Spatial domain filtering techniques like mean, median, and order statistics filters are covered for noise removal. Frequency domain filtering using band reject filters is also discussed, as well as adaptive filtering techniques. Examples are provided to demonstrate noise removal.