Download as PDF, PPTX


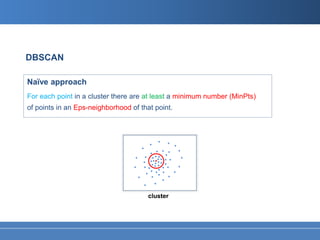

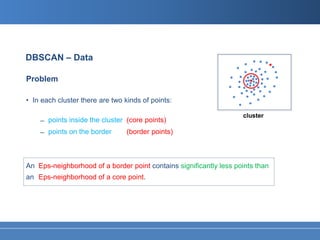


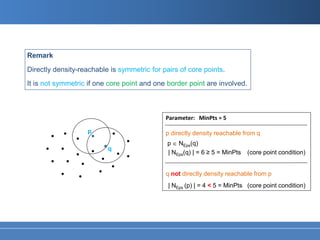
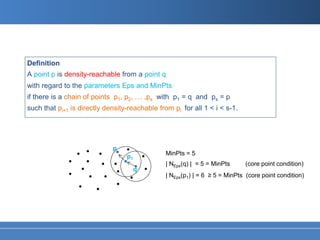
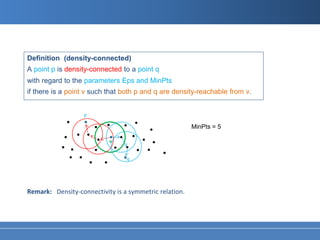
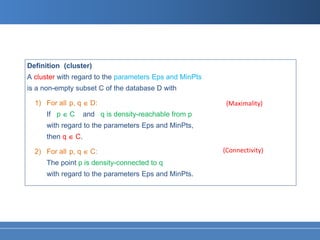


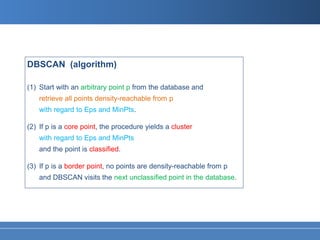





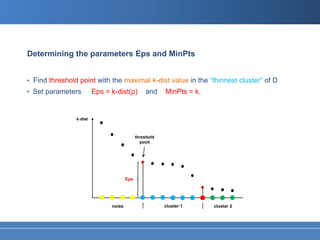

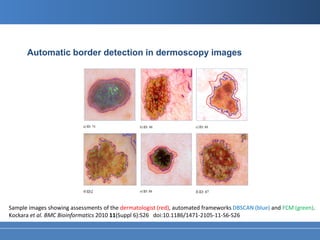




This document summarizes the DBSCAN clustering algorithm. DBSCAN finds clusters based on density, requiring only two parameters: Eps, which defines the neighborhood distance, and MinPts, the minimum number of points required to form a cluster. It can discover clusters of arbitrary shape. The algorithm works by expanding clusters from core points, which have at least MinPts points within their Eps-neighborhood. Points that are not part of any cluster are classified as noise. Applications include spatial data analysis, image segmentation, and automatic border detection in medical images.