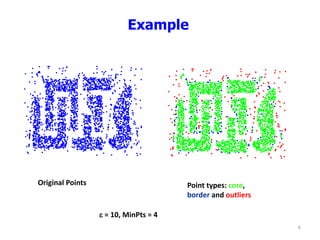
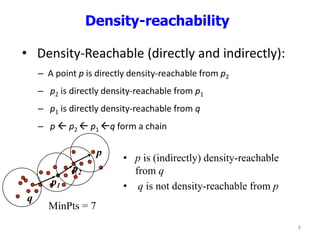
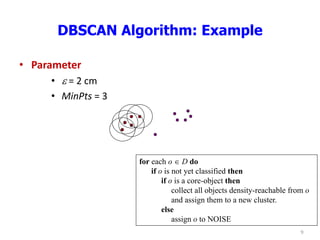
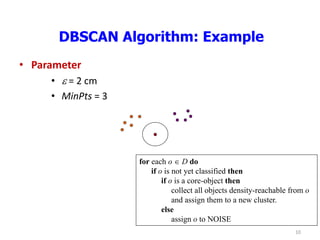
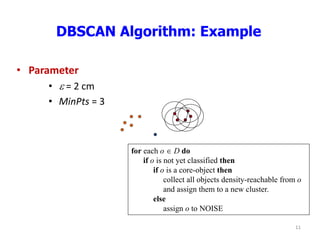
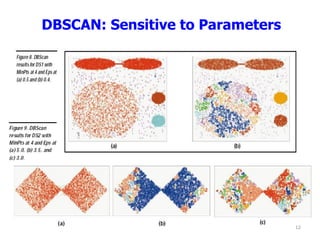
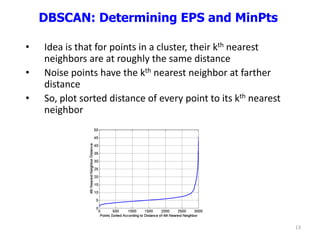
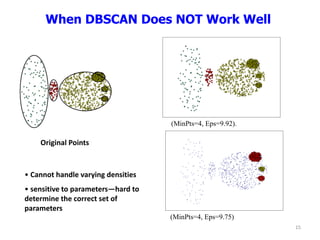
This document outlines a lecture on density-based clustering methods, focusing on the DBSCAN algorithm. It describes the definitions of core, border, and outlier points, and explains the concepts of density-reachability and the parameters needed for DBSCAN, including epsilon and minpts. The lecture also discusses the advantages and disadvantages of DBSCAN in clustering analysis.