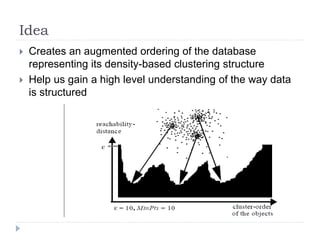
OPTICS is an algorithm that identifies variable density clusters without specifying the distance parameter (eps) required by DBSCAN. It creates an ordering of database objects based on their core and reachability distances. This ordering represents the clustering structure and density connectivity of the data. OPTICS extends DBSCAN by processing multiple distance parameters simultaneously. It stores an object's core distance and reachability distance to assign cluster memberships based on density reachability.