Downloaded 49 times
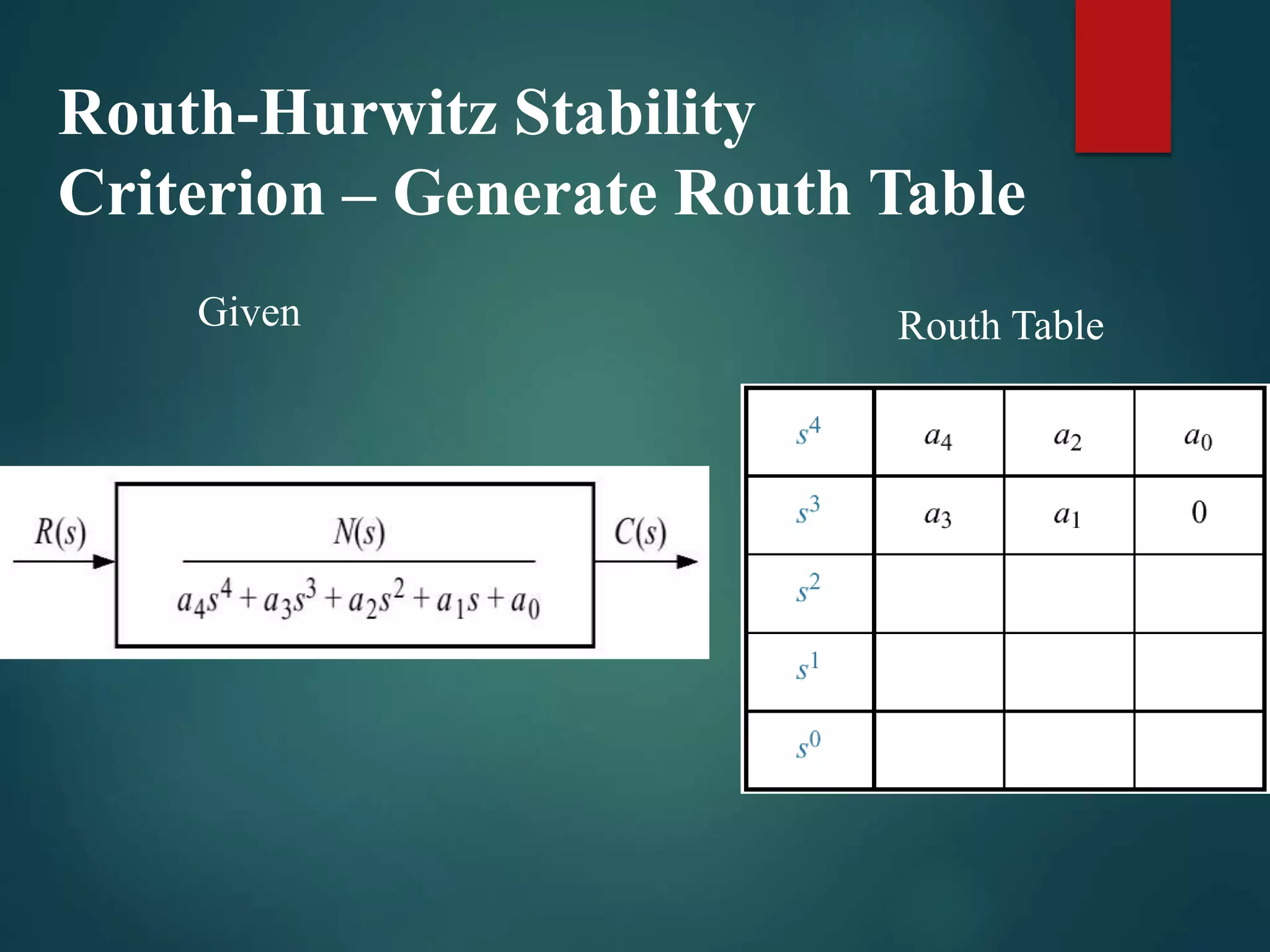
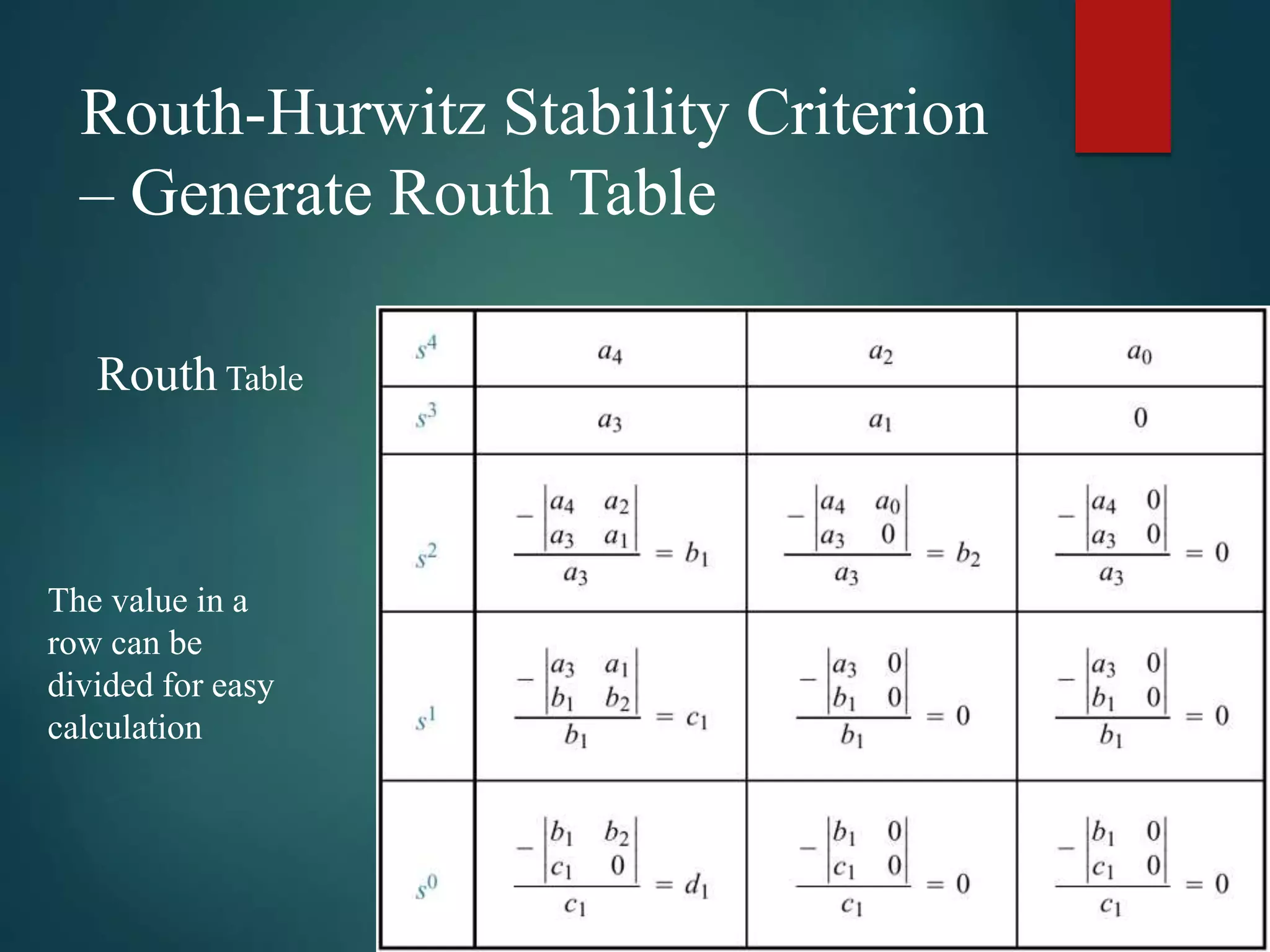
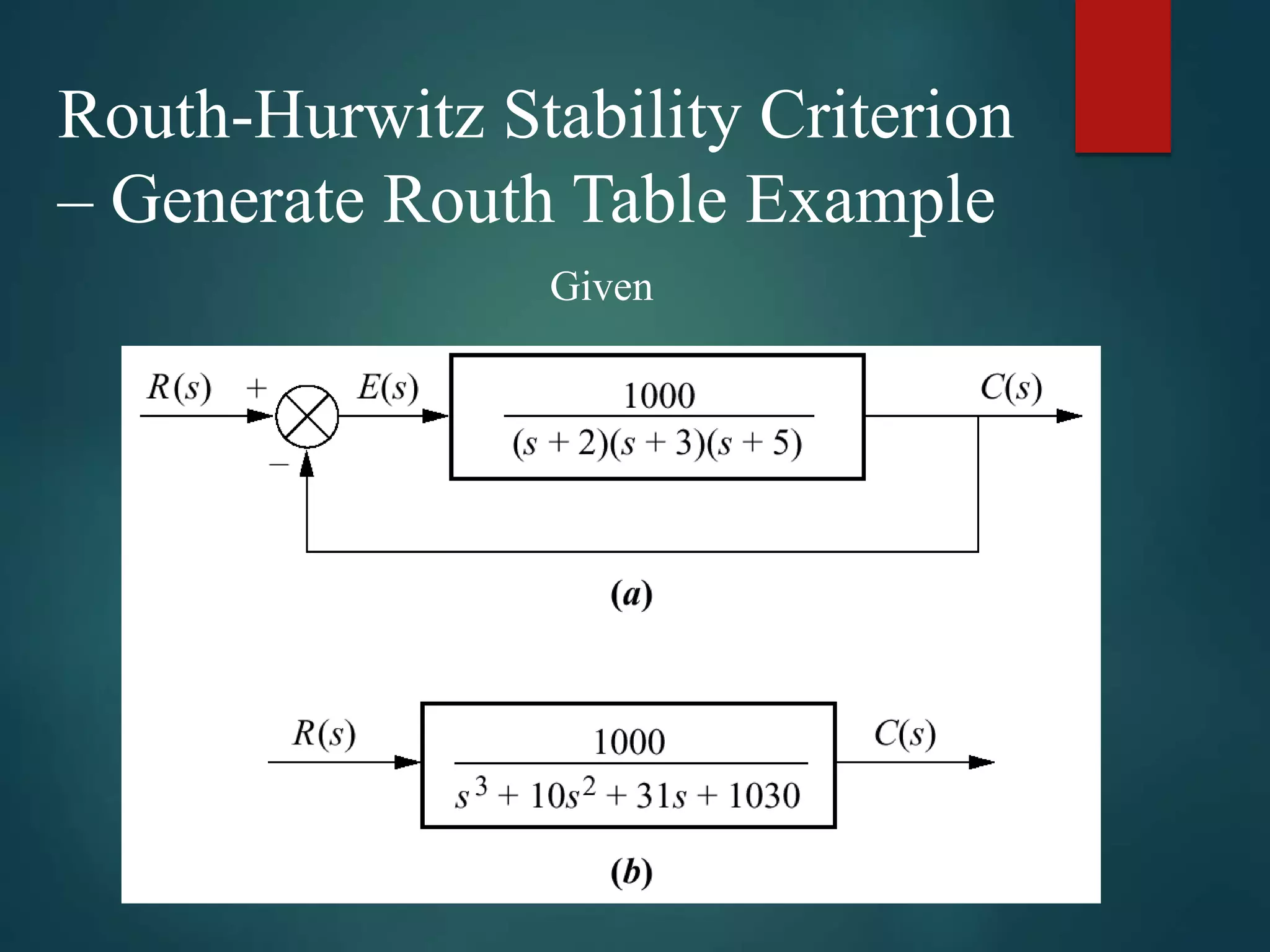
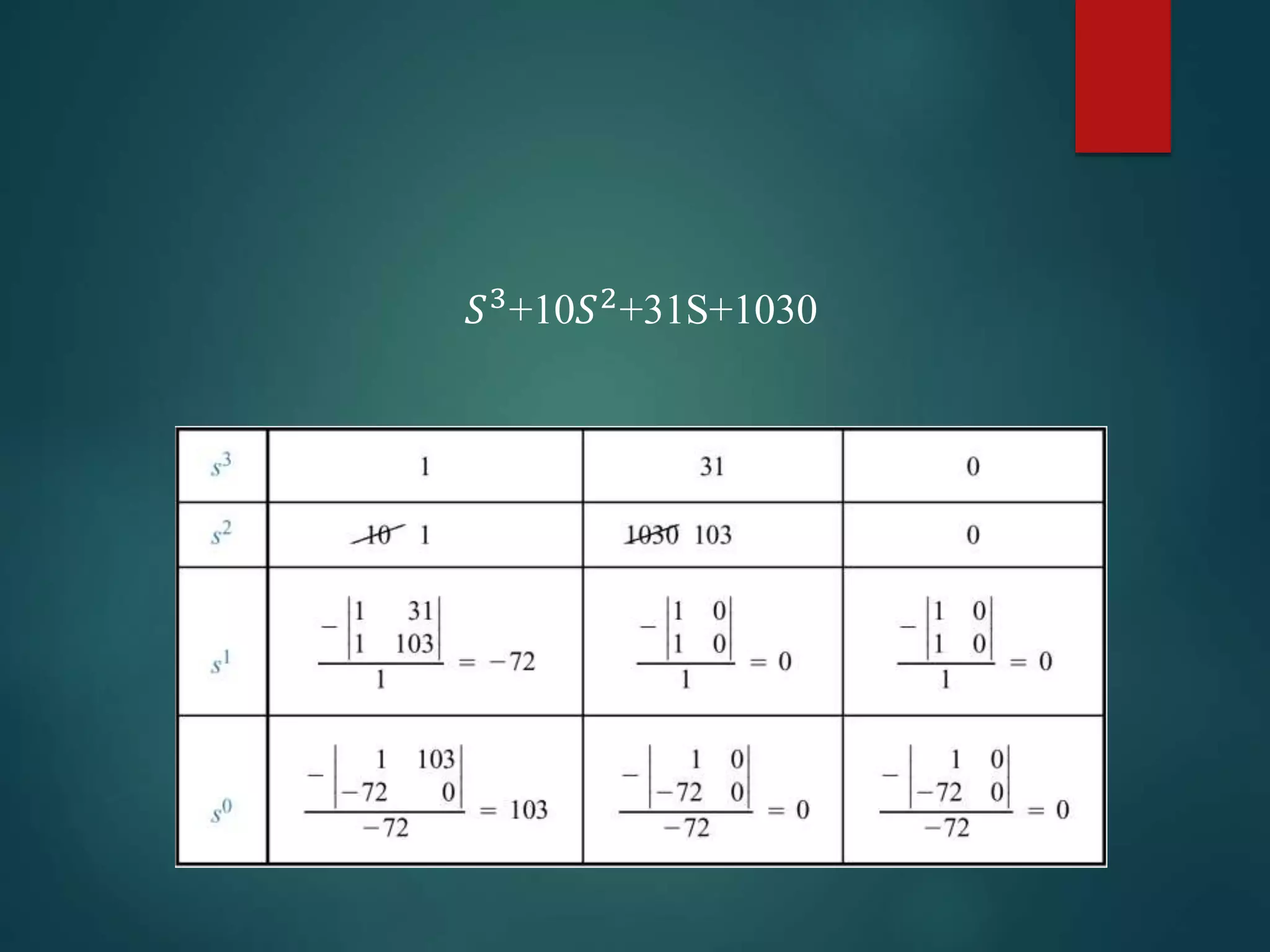
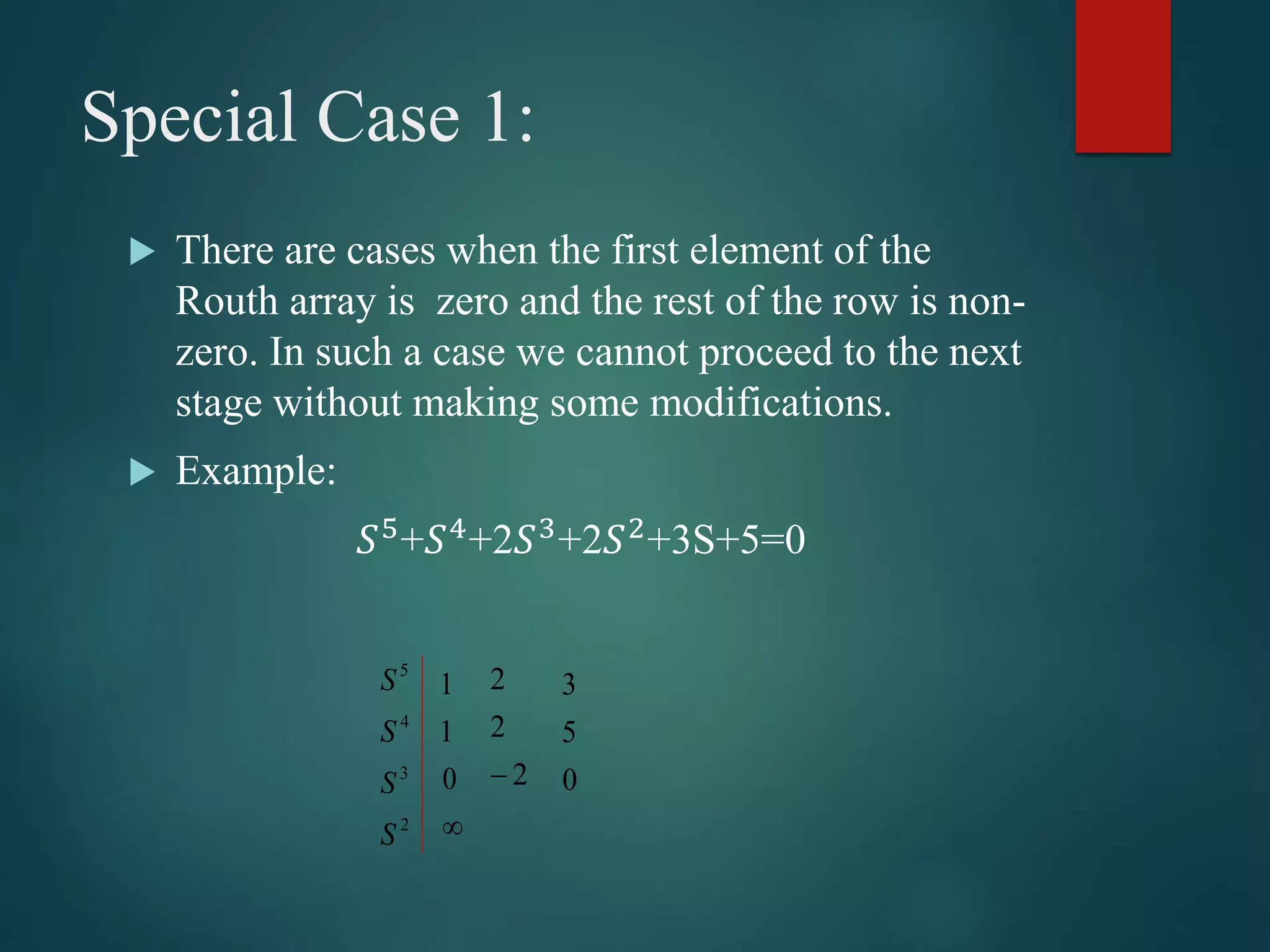
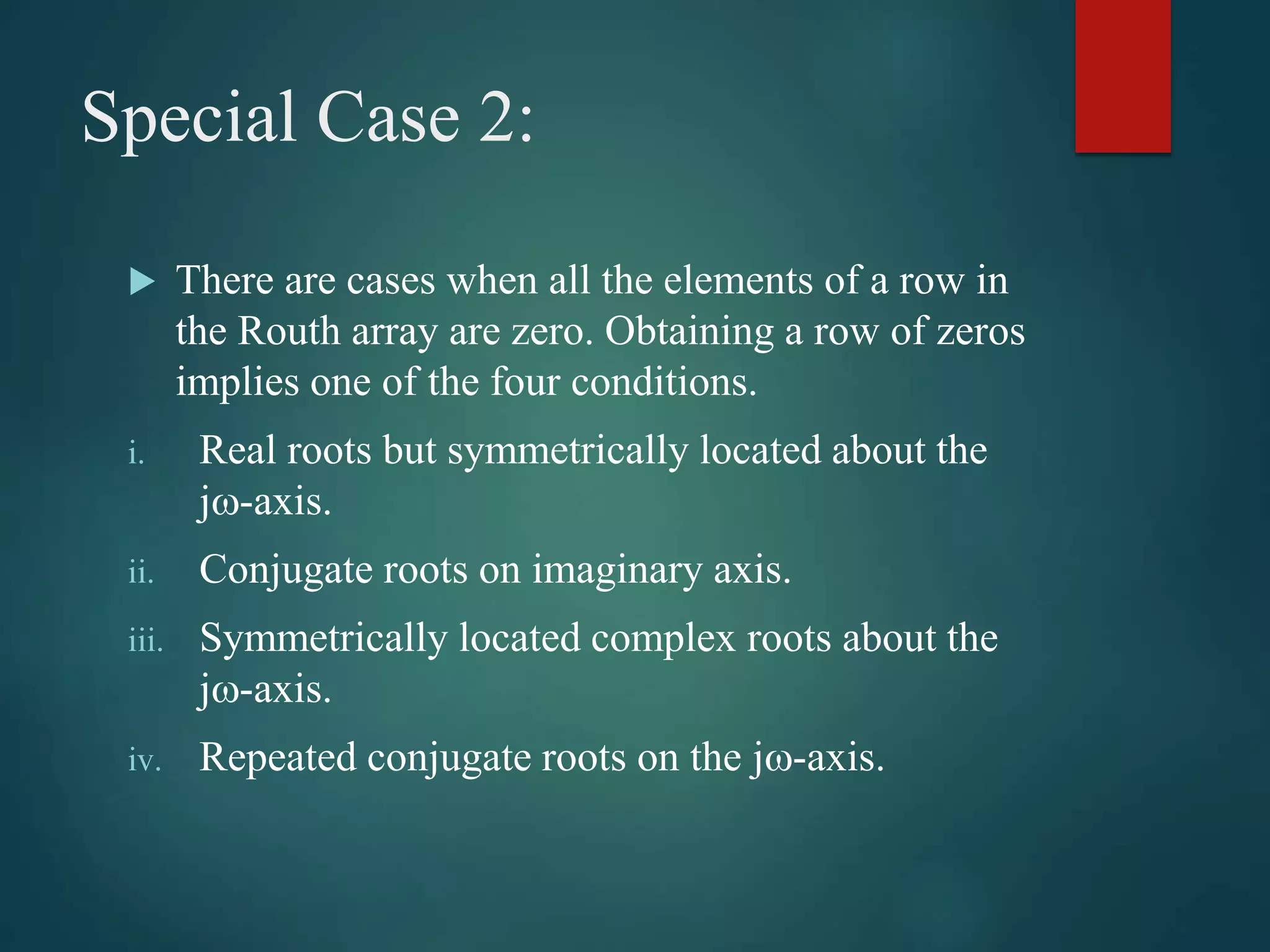
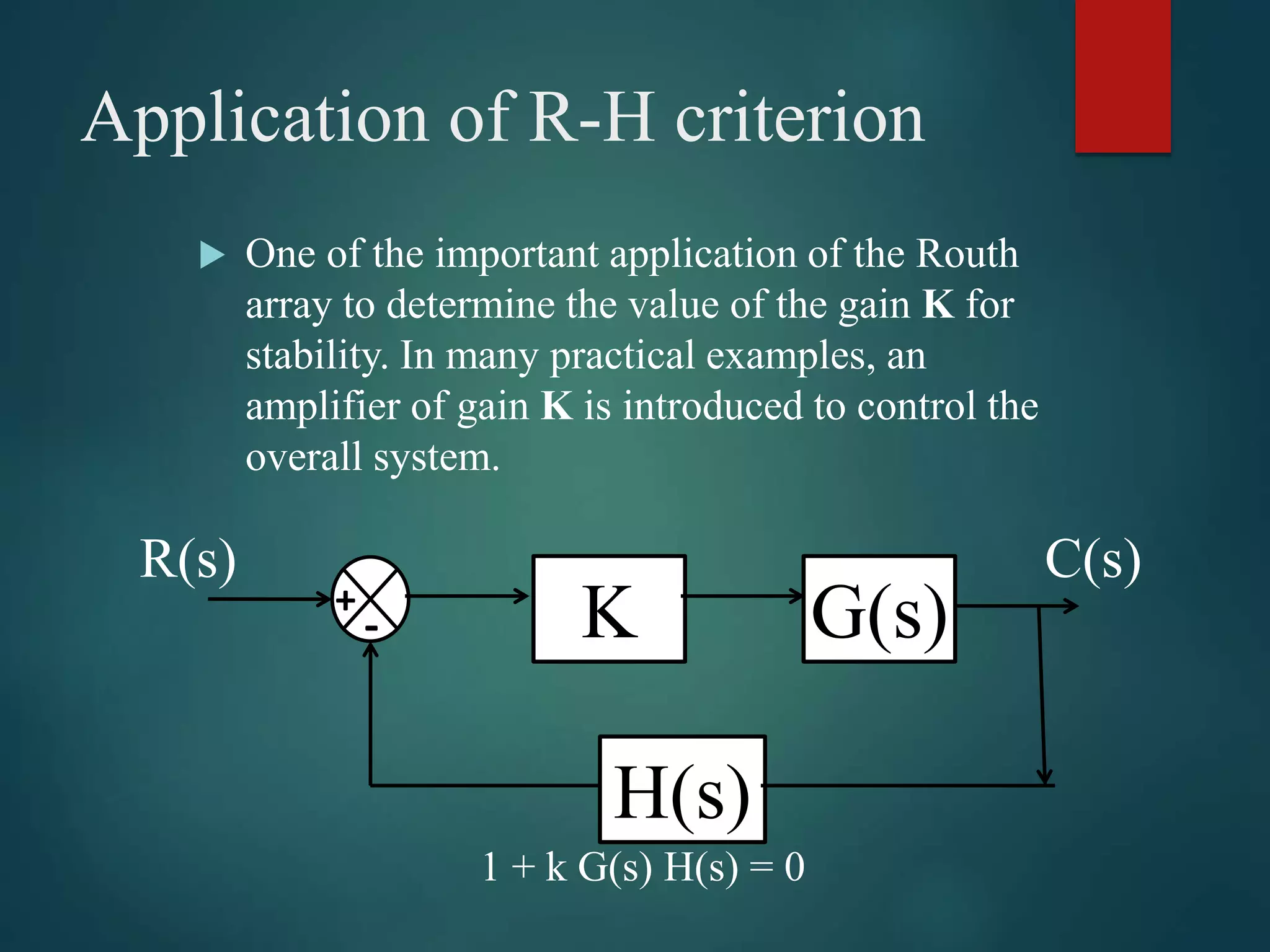

1. The document discusses the Routh-Hurwitz stability criterion, which is a test used to determine the stability of linear time-invariant systems by constructing a Routh array from the coefficients of the characteristic equation and analyzing it. 2. Special cases that can occur with the Routh array, such as a zero in the first column or an entire zero row, are explained along with their implications. 3. An important application of the Routh-Hurwitz criterion is determining the range of values for a system gain K that ensures stability.














































![Roth_herwitz_stability_criterion-[1].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/rothherwitzstabilitycriterion1-251026051926-6a7e967e-thumbnail.jpg?width=640&height=640&fit=bounds)

















![Automaticroomlightcontroller[1]](https://cdn.slidesharecdn.com/ss_thumbnails/automaticroomlightcontroller1-150717125301-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)























