Downloaded 53 times
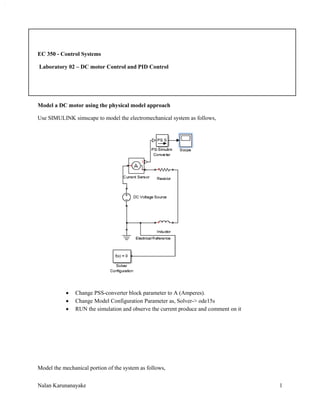












1) The document describes modeling a DC motor system using Simulink and modeling the mechanical and electrical portions. It also involves producing translational motion and observing outputs with different spring rates. 2) PID control of the DC motor system is explored through proportional, PI, PD, and full PID control. Effects of changing gains on response are examined. PID tuning in Simulink is demonstrated to automatically determine gains. 3) Tuning the PID controller for the DC motor model in Simulink is shown, with the controller sampled at 0.02 seconds. Gains are automatically determined through PID tuning to achieve reasonable performance and robustness based on the linearized plant model. Output response is observed and commenting on speed