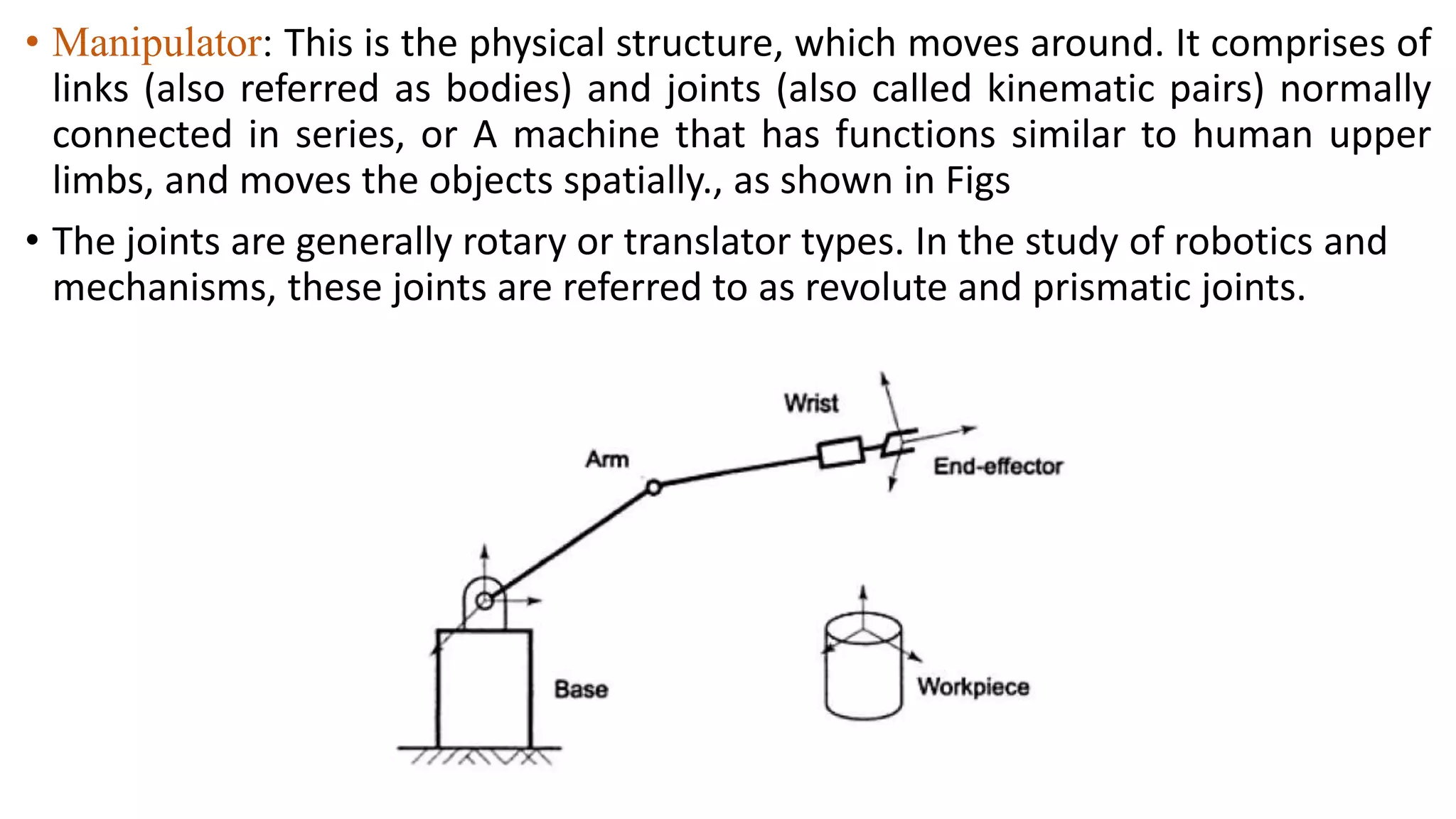
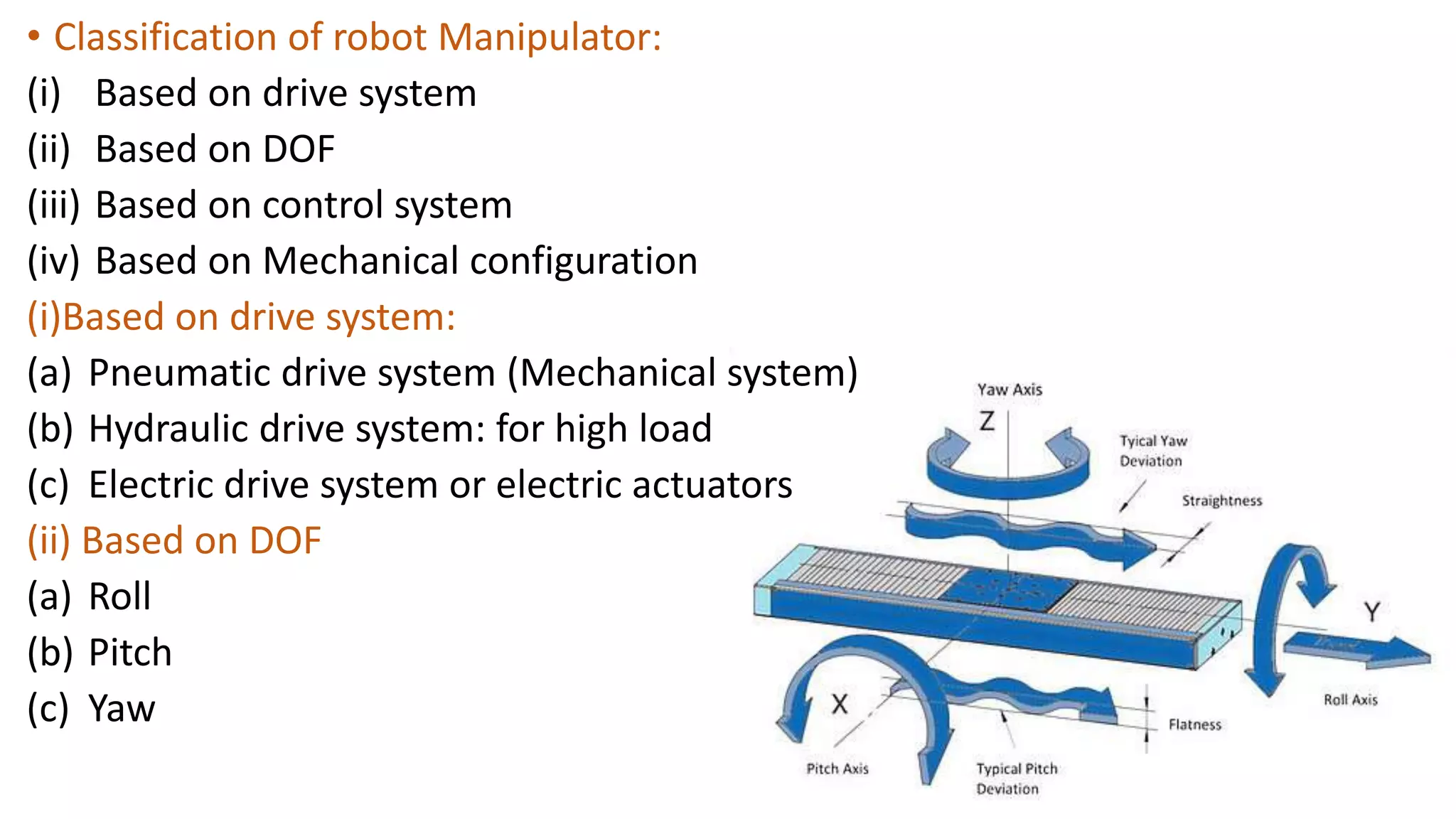
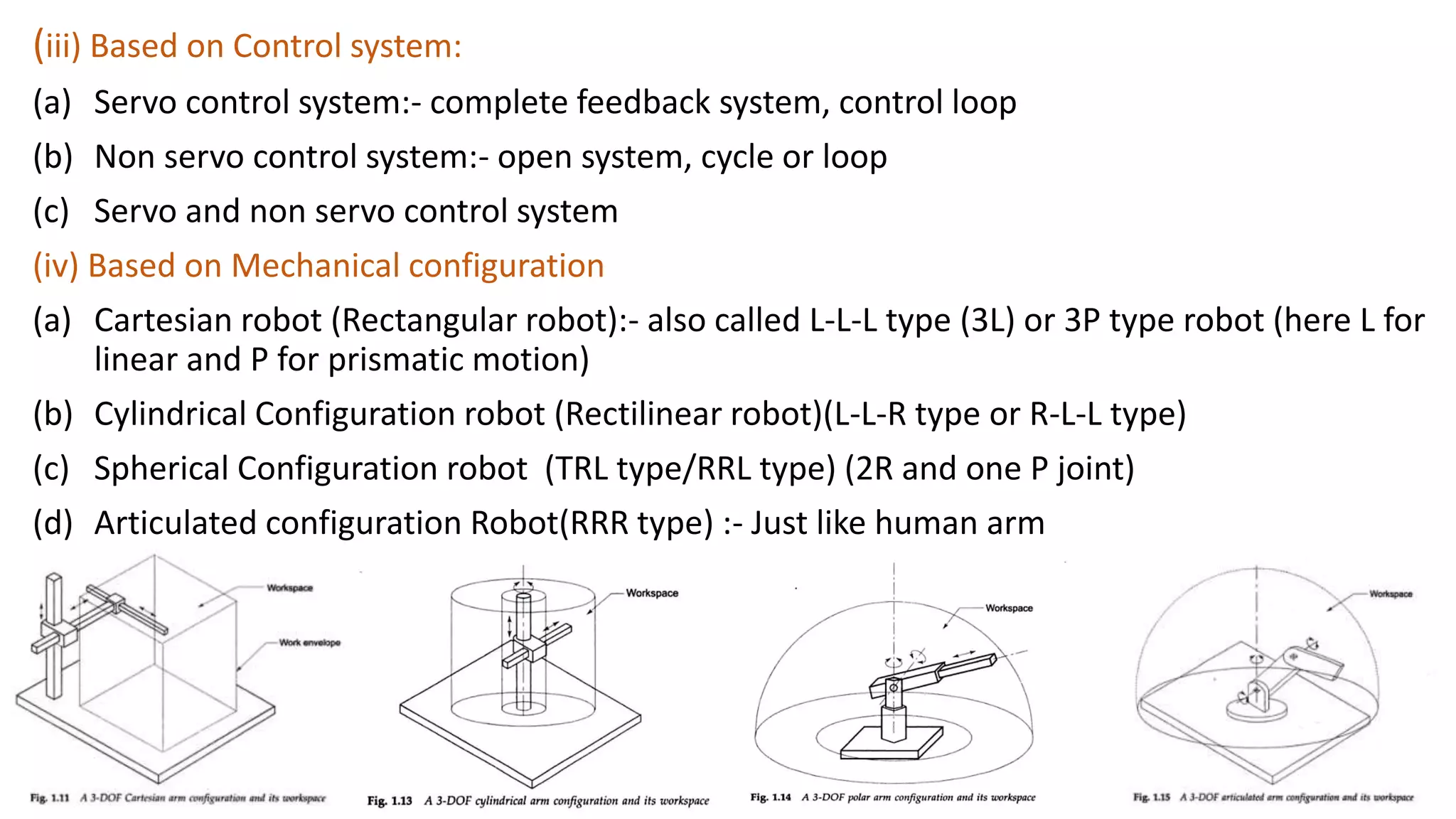
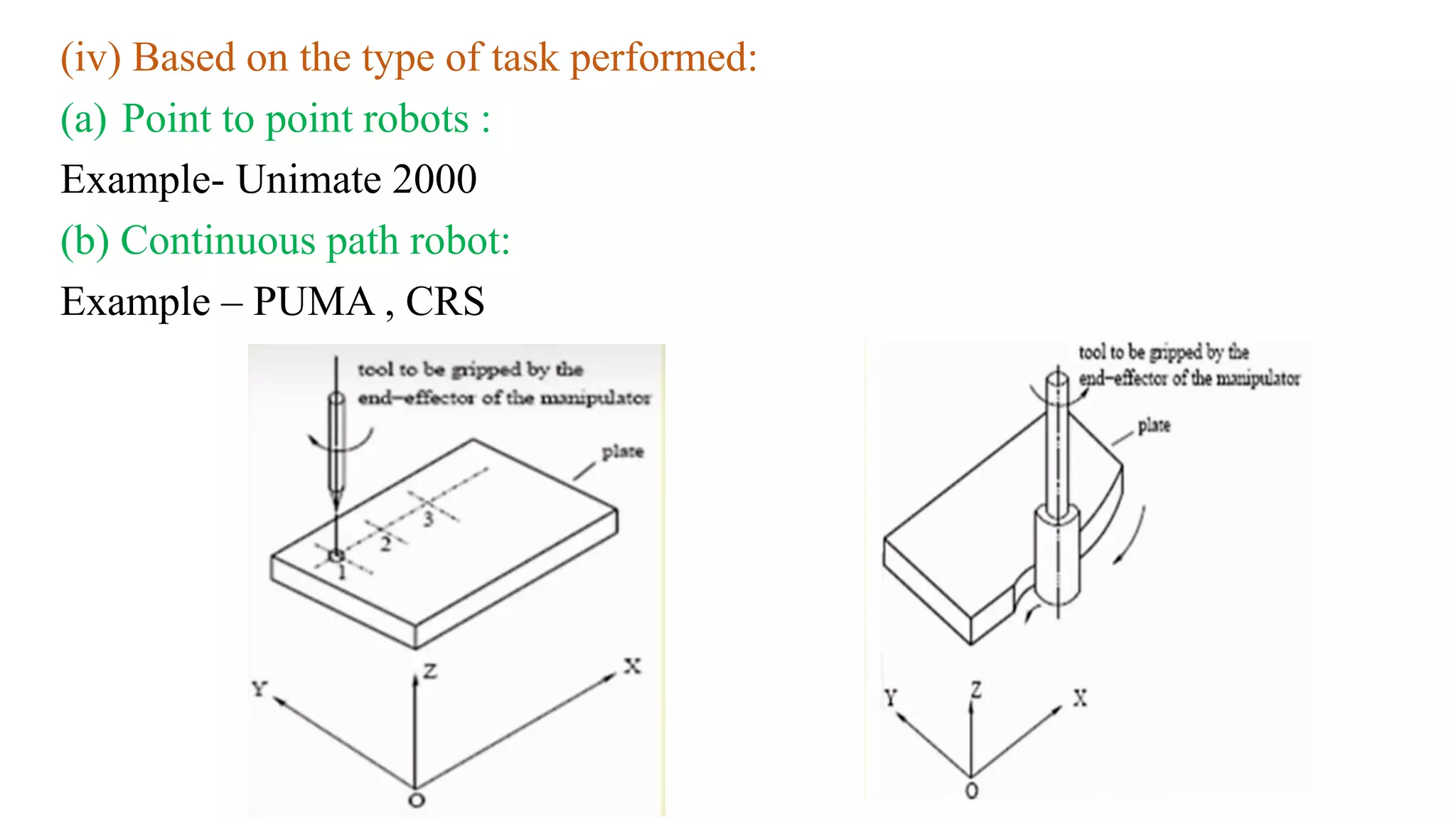
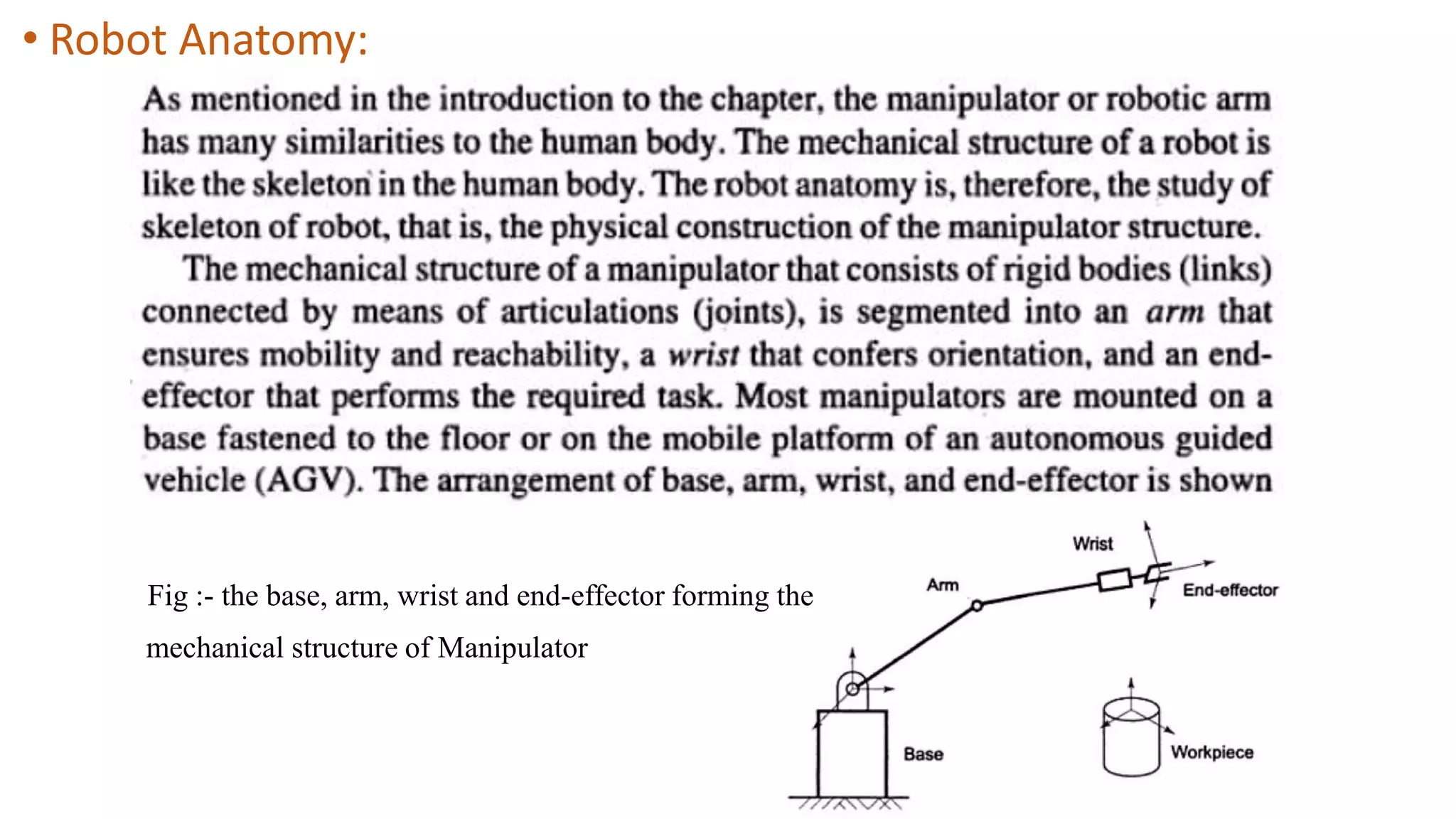
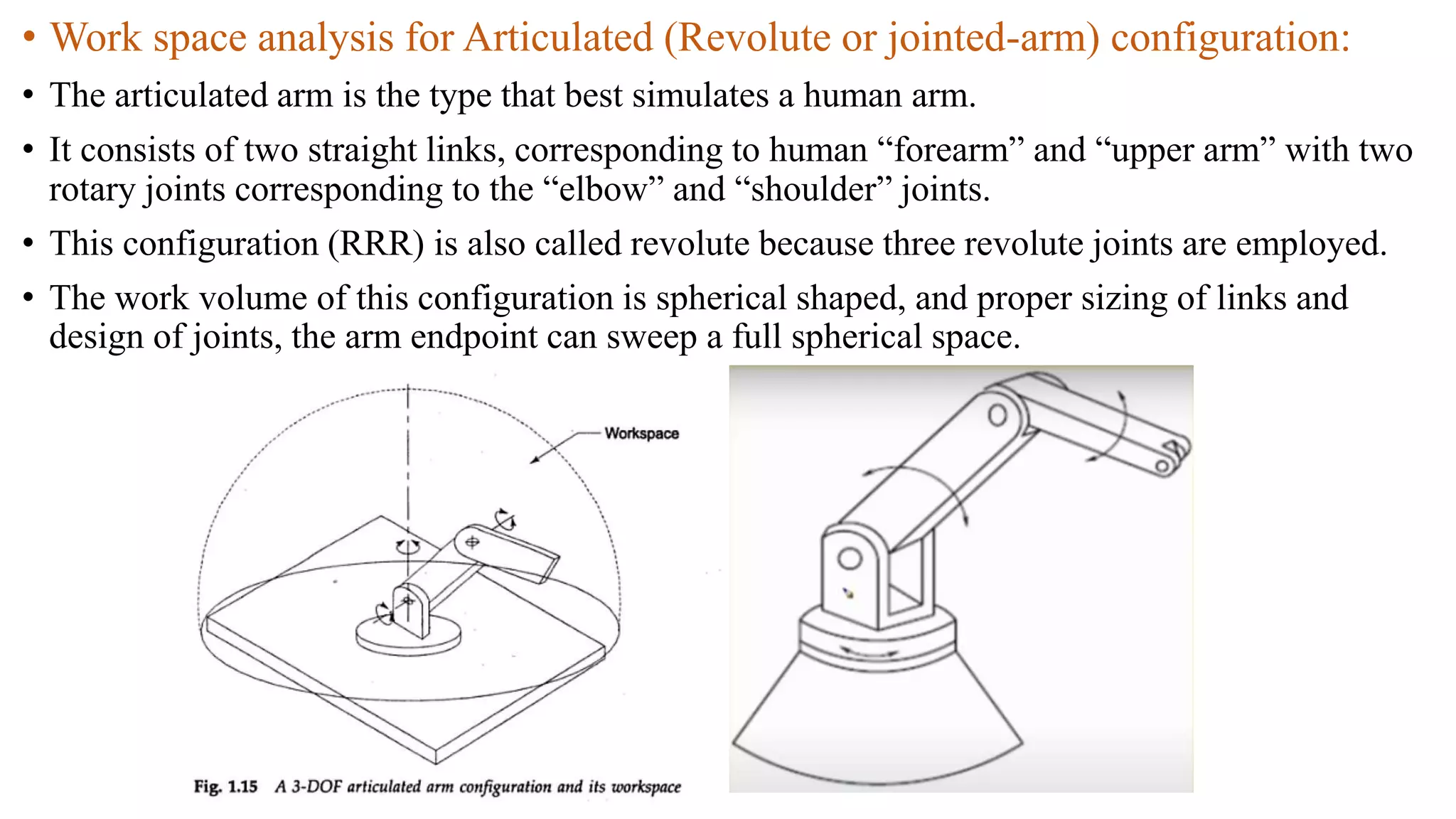
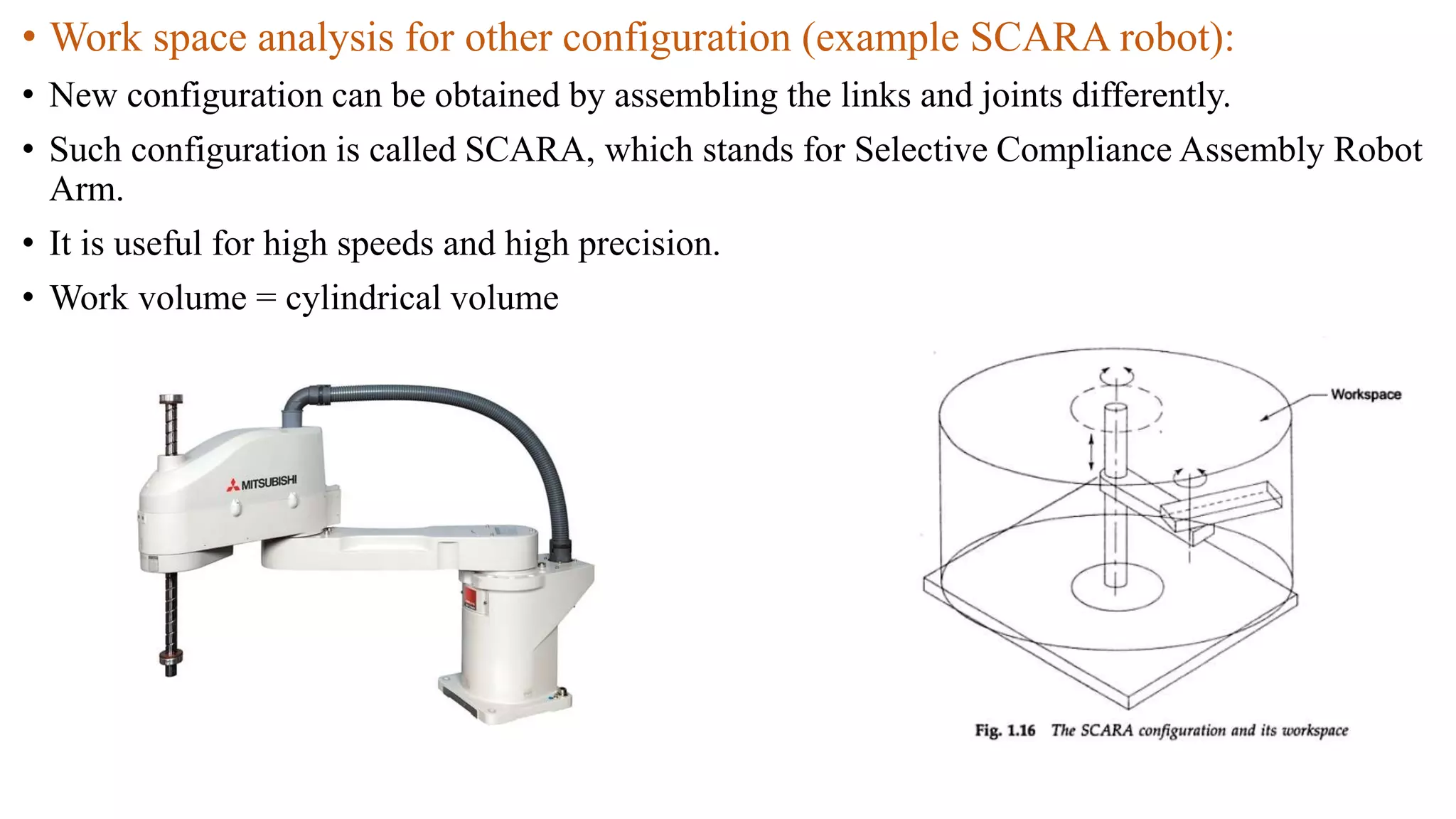
This document provides an introduction to robots and robotics. It defines a robot as a programmable mechanical device that uses sensors and actuators to manipulate objects. Robotics is the study of designing, manufacturing, and using robots. Robots are useful for performing dangerous, repetitive, or precision tasks that humans prefer to avoid. The document discusses robot components like manipulators, joints, end-effectors, and workspaces. It also categorizes robots based on functions, sizes, applications, tasks, controllers, and configurations. The goal is to understand how to classify and select robots based on their specifications and intended applications.