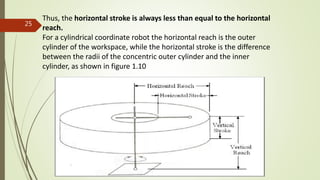
This document discusses key parameters and specifications for industrial robots. It describes six key parameters: (i) number of axes, (ii) load carrying capacity, (iii) maximum speed, (iv) reach and stroke, (v) tool orientation, and (vi) precision and accuracy. It provides details on each parameter, including defining major and minor axes, how load capacity depends on weight of the end effector, how speed is measured, differences between reach and stroke, and how tool orientation is determined by the robot's axes.