Downloaded 569 times

![Ch7_8
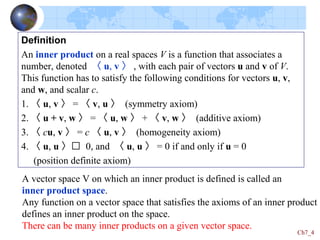
Example 3
Consider the vector space Pn of polynomials of degree ≤ n. Let f
and g be elements of Pn. Prove that the following function
defines an inner product of Pn.
Determine the inner product of polynomials
f(x) = x2
+ 2x – 1 and g(x) = 4x + 1
∫=
1
0
)()(g, dxxgxff
Solution
Axiom 1: fgdxxfxgdxxgxfgf ,)()()()(,
1
0
1
0
=== ∫∫
hghf
dxxhxgdxxhxf
dxxhxgxhxf
dxxhxgxfhgf
,,
)()()]()([
)]()()()([
)()]()([,
1
0
1
0
1
0
1
0
+=
+=
+=
+=+
∫∫
∫
∫Axiom 2:](https://image.slidesharecdn.com/1639-vector-linearalgebra-161031145749/85/1639-vector-linear-algebra-8-320.jpg)

 = 5x2
+ 1 is .
3
28](https://image.slidesharecdn.com/1639-vector-linearalgebra-161031145749/85/1639-vector-linear-algebra-11-320.jpg)
![Ch7_14
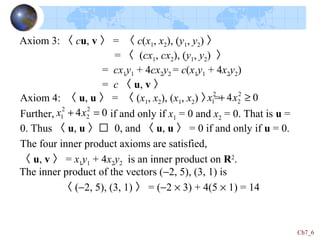
Example 5
Consider the inner product space Pn of polynomials with inner
product
The angle between two nonzero functions f and g is given by
Determine the cosine of the angle between the functions
f(x) = 5x2
and g(x) = 3x
∫=
1
0
)()(, dxxgxfgf
gf
dxxgxf
gf
gf )()(,
cos
1
0∫==θ
Solution We first compute ||f || and ||g||.
3]3[3and5]5[5
1
0
2
1
0
222
==== ∫∫ dxxxdxxx
Thus
4
15
35
)3)(5()()(
cos
1
0
2
1
0
===
∫∫ dxxx
gf
dxxgxf
θ](https://image.slidesharecdn.com/1639-vector-linearalgebra-161031145749/85/1639-vector-linear-algebra-14-320.jpg)
![Ch7_16
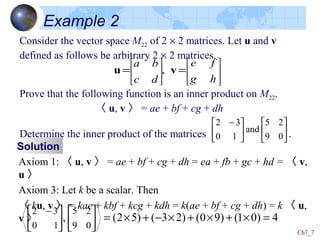
Orthogonal Vectors
Def. Let V be an inner product space. Two nonzero vectors u and
v in V are said to be orthogonal if
0, =vu
Example 6
Show that the functions f(x) = 3x – 2 and g(x) = x are orthogonal
in Pn with inner product
.)()(,
1
0∫= dxxgxfgf
Solution
0][))(23(,23 1
0
23
1
0
=−=−=− ∫ xxdxxxxx
Thus the functions f and g are orthogonal in this inner product
Space.](https://image.slidesharecdn.com/1639-vector-linearalgebra-161031145749/85/1639-vector-linear-algebra-16-320.jpg)
![Ch7_18
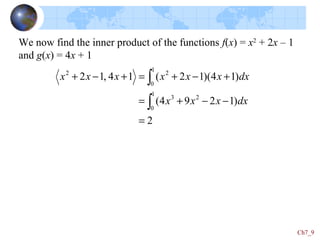
Example 7
Consider the inner product space Pn of polynomials discussed
earlier. Determine which of the functions g(x) = x2
– 3x + 5 or h(x)
= x2
+ 4 is closed to f(x) = x2
.
Solution
13)53(53,53,)],([
1
0
22
=−=−−=−−= ∫ dxxxxgfgfgfd
16)4(4,4,)],([
1
0
22
=−=−−=−−= ∫ dxhfhfhfd
Thus
The distance between f and h is 4, as we might suspect, g is closer
than h to f.
.4),(and13),( == hfdgfd](https://image.slidesharecdn.com/1639-vector-linearalgebra-161031145749/85/1639-vector-linear-algebra-18-320.jpg)









![Ch7_33
The least squares solution is
Thus a = 1, b = 0.7.
The equation of the least-squares line for this data is
y = 1 + 0.7x
=
−−
−
=−
7.0
1
6226
1001020
20
1
])[(
4
2
4
1
1
ytt
AAA
Figure 7.11](https://image.slidesharecdn.com/1639-vector-linearalgebra-161031145749/85/1639-vector-linear-algebra-33-320.jpg)

![Ch7_35
The least squares solution is
Thus a = 15.25, b = -10.05, c = 1.75.
The equation of the least-squares parabola for these data points is
y = 15.25 – 10.05x + 1.75x2
=
= −
−−
−−
−−
−
75.1
05.10
25.15
3
1
2
7
5555
19272331
15251545
1
20
1
])[( ytt
AAA
Figure 7.12](https://image.slidesharecdn.com/1639-vector-linearalgebra-161031145749/85/1639-vector-linear-algebra-35-320.jpg)



This document discusses inner product spaces and how inner products can be defined on vector spaces to generalize concepts like the dot product, vector norms, angles between vectors, and distances between vectors. It provides examples of defining inner products on spaces like Rn, the space of polynomials Pn, and the space of 2x2 matrices M22. It shows how norms, orthogonality, and distances can be calculated in these spaces based on their defined inner products. The document also discusses how different inner products can lead to different geometries beyond standard Euclidean geometry.