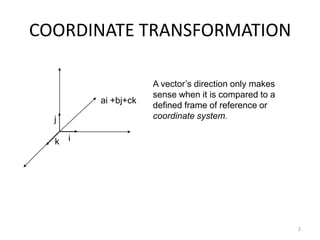
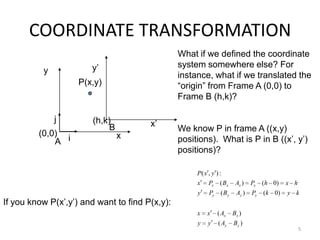
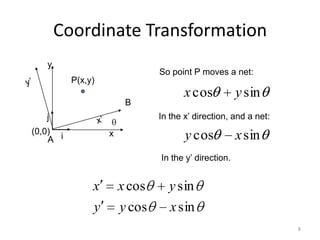
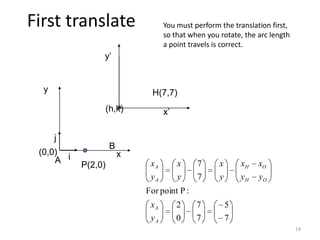
This document discusses coordinate transformations, including translating and rotating coordinate frames. It provides examples of how to calculate the coordinates of a point in a new frame after a translation or rotation from the original frame. Specifically, it shows how to calculate the new coordinates of point P if the original frame is translated to a new origin or rotated by 30 degrees. The key steps are to first translate the frame if needed, then apply the rotation matrix to calculate the new x' and y' coordinates of the point in the rotated frame.