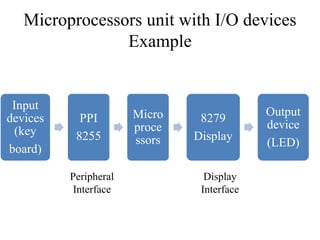
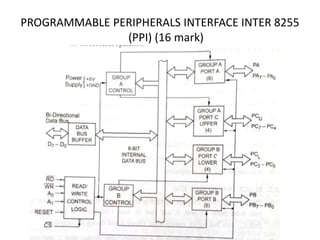
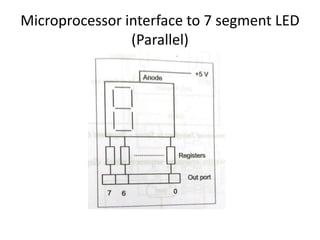
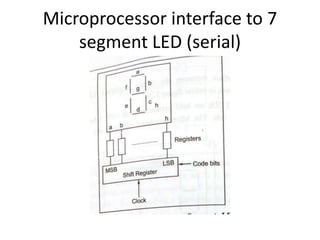
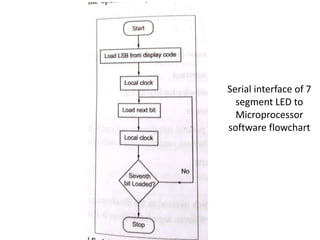
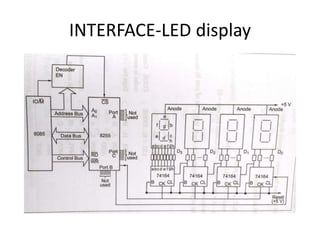
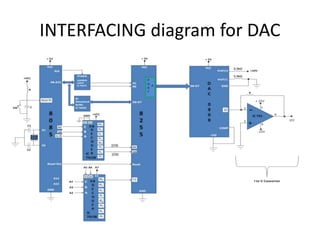
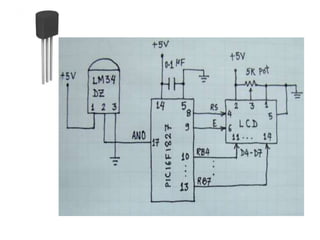
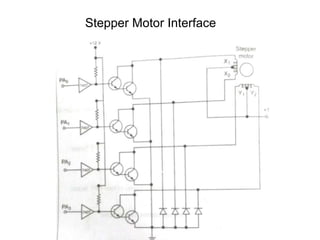
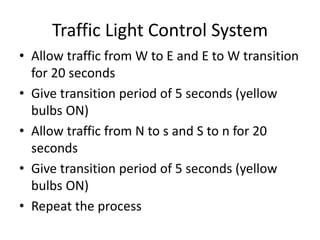
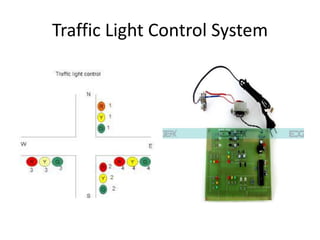
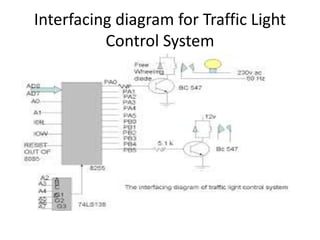
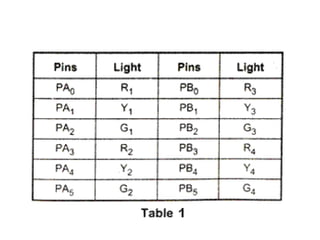
The document discusses various programmable peripheral interface chips used for input/output interfacing in microprocessor systems. It describes the architecture and operating modes of the 8255 Programmable Peripheral Interface chip, which has three 8-bit I/O ports that can be programmed for applications like keyboard interfacing, LED displays, analog-to-digital conversion, digital-to-analog conversion, temperature control, stepper motor control, and traffic light control systems. Circuit diagrams and software flowcharts are provided for different interfacing applications using the 8255 PPI chip.


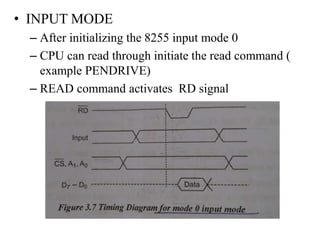



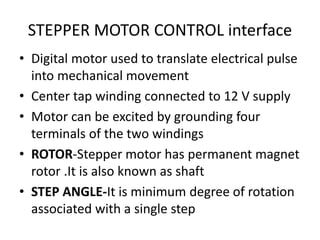

































































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)
















