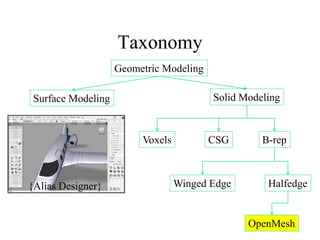
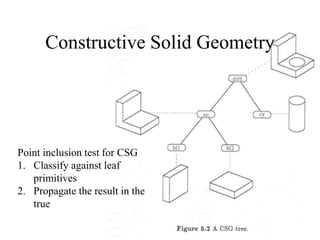
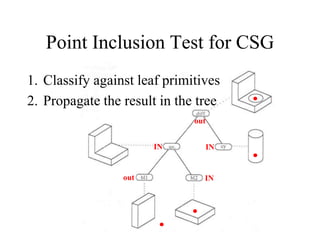
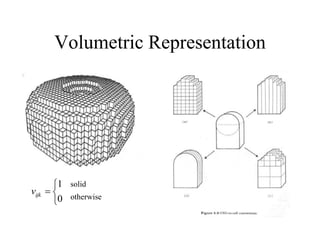
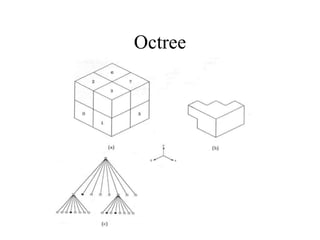
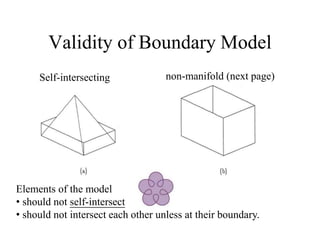
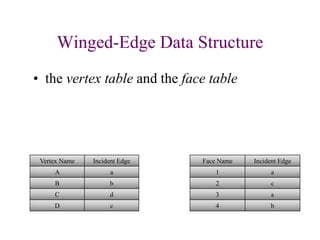
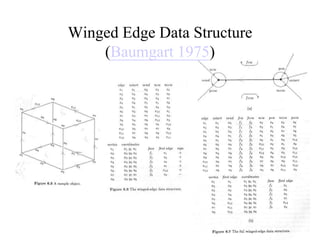
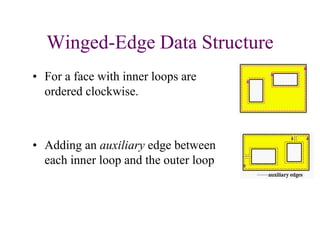
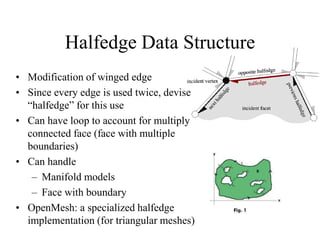
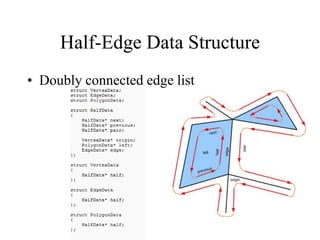
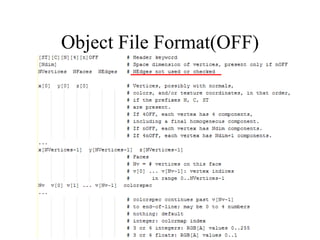
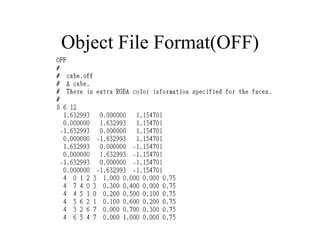
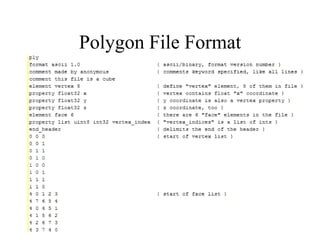
The document discusses different techniques for solid modeling, including boundary representation (B-rep) and constructive solid geometry (CSG). B-rep uses faces, edges and vertices to represent a solid's boundary. CSG constructs solids by combining basic geometric entities using set-theoretic operations like union and difference. The document also covers data structures for representing solids, such as winged edge and half edge, and file formats for storing 3D models, such as OFF and PLY.


































































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)









