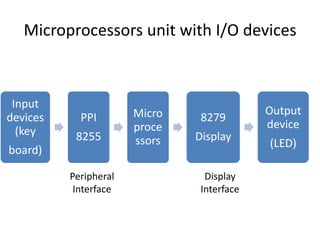
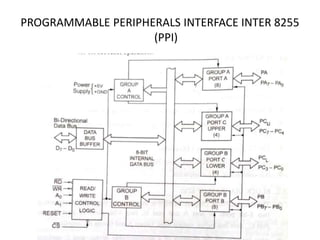
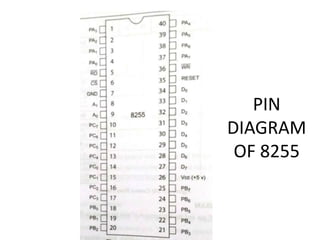
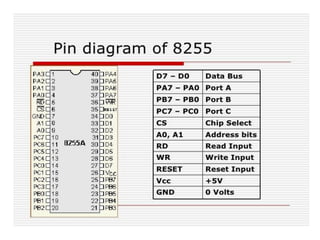
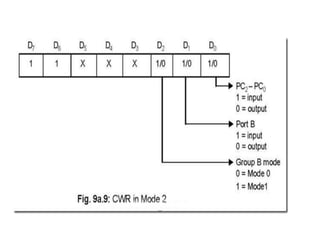
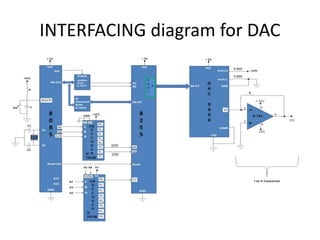
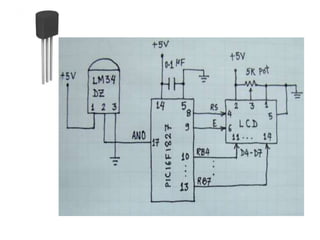
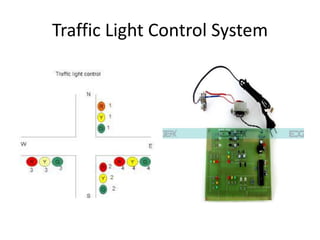
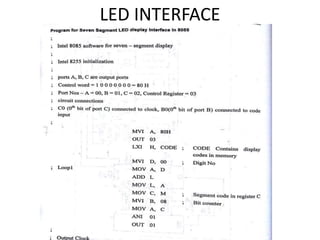
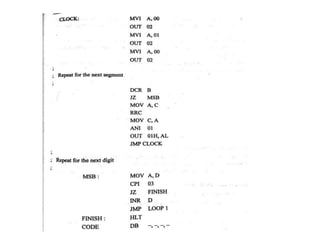
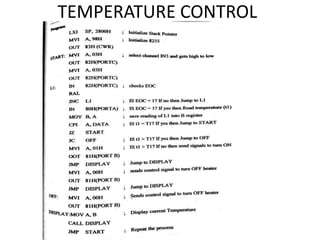
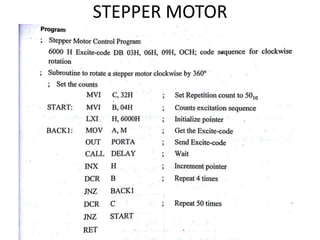
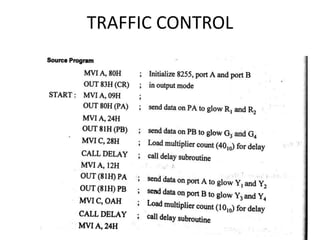
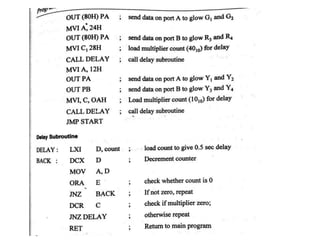
The document provides an overview of various interfacing techniques used with microprocessors, focusing on the architecture of the 8255 programmable peripheral interface (PPI) and input/output devices. It details different modes of operation for the PPI, such as simple I/O, handshaking, and bi-directional communication, as well as applications including keyboard interfacing, LED displays, temperature control, and stepper motor control. Additionally, it explains memory and I/O mapped schemes, programming methods for various modes, and the significance of interfacing in microprocessor design.