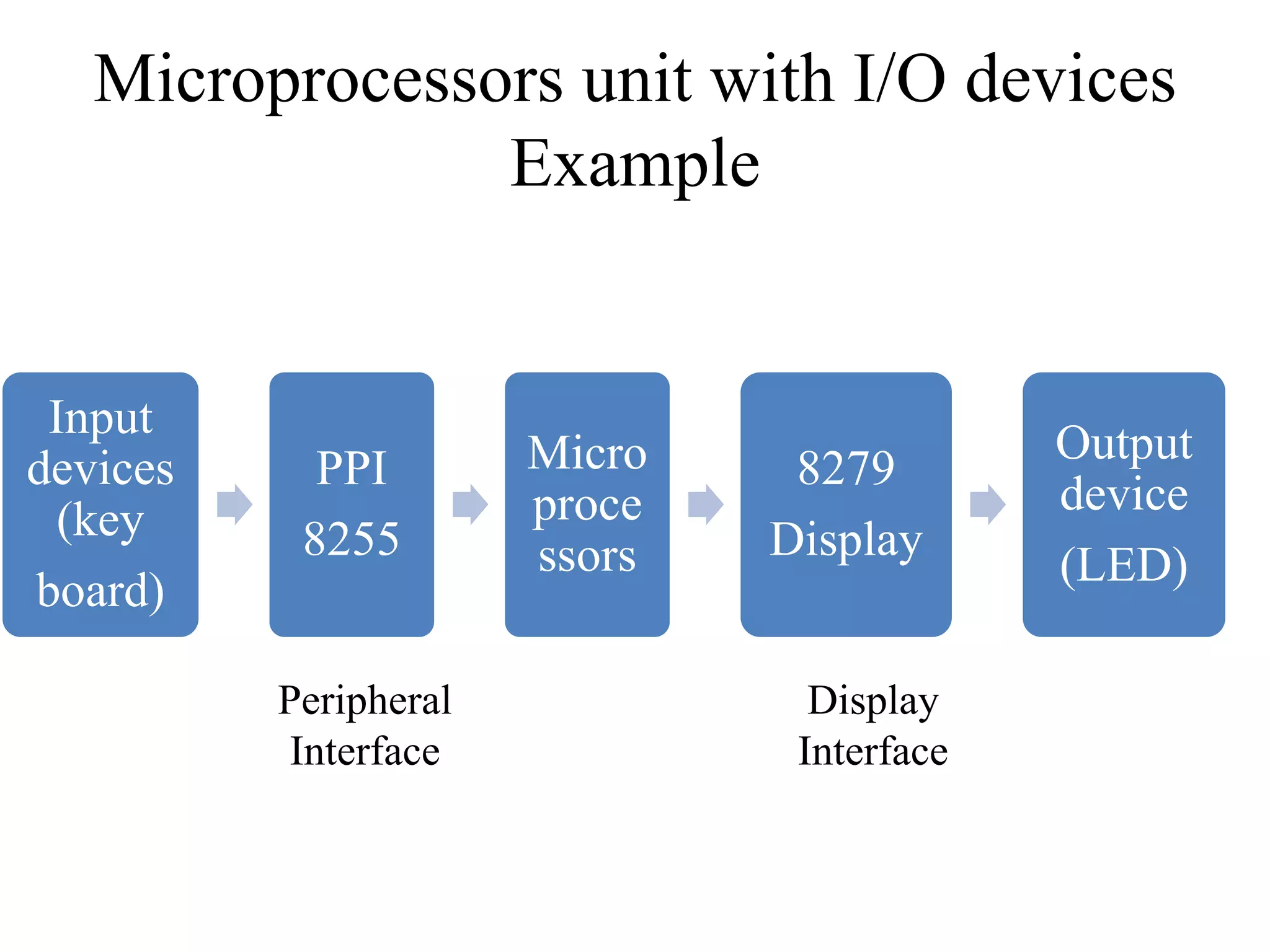
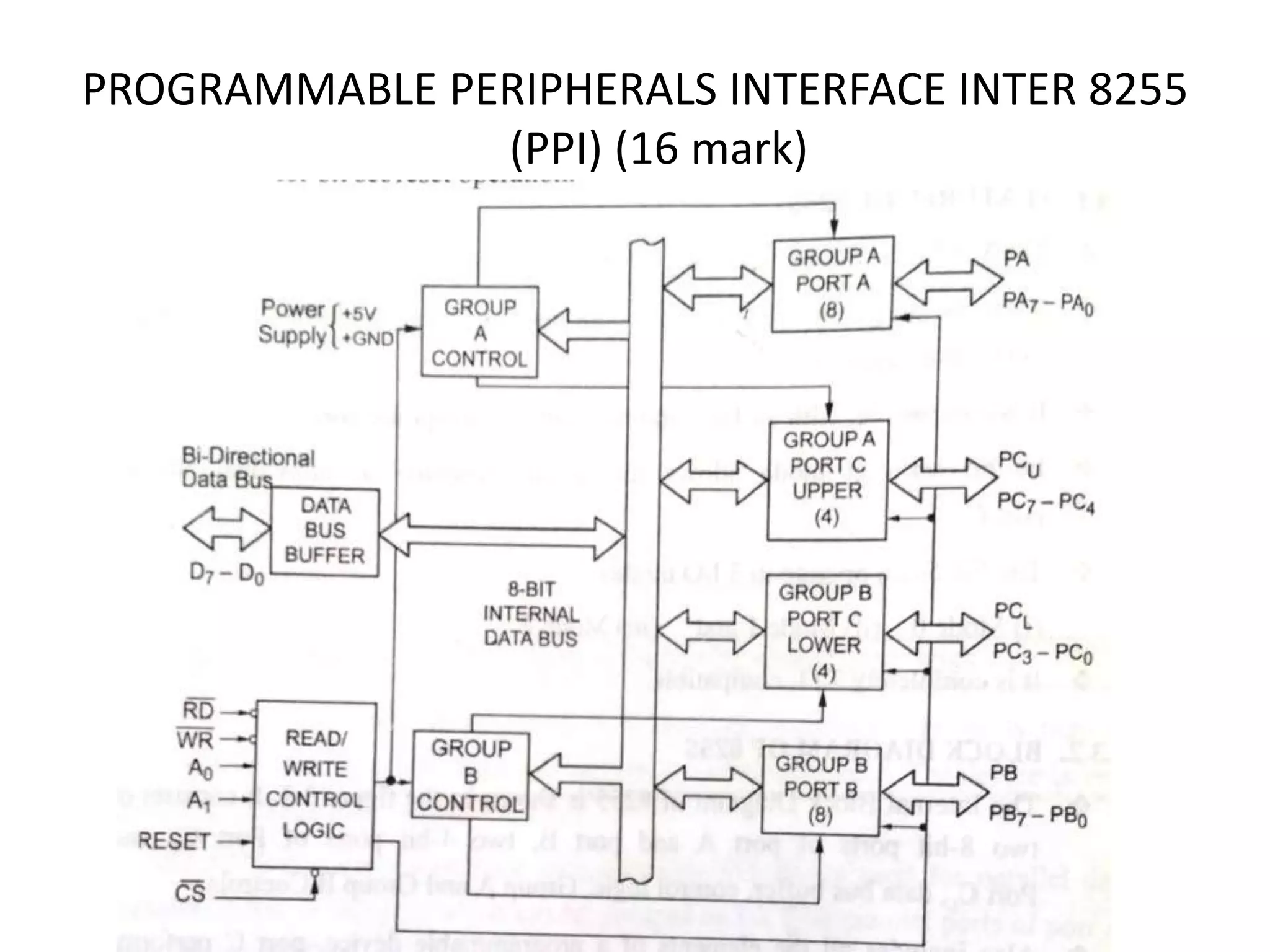
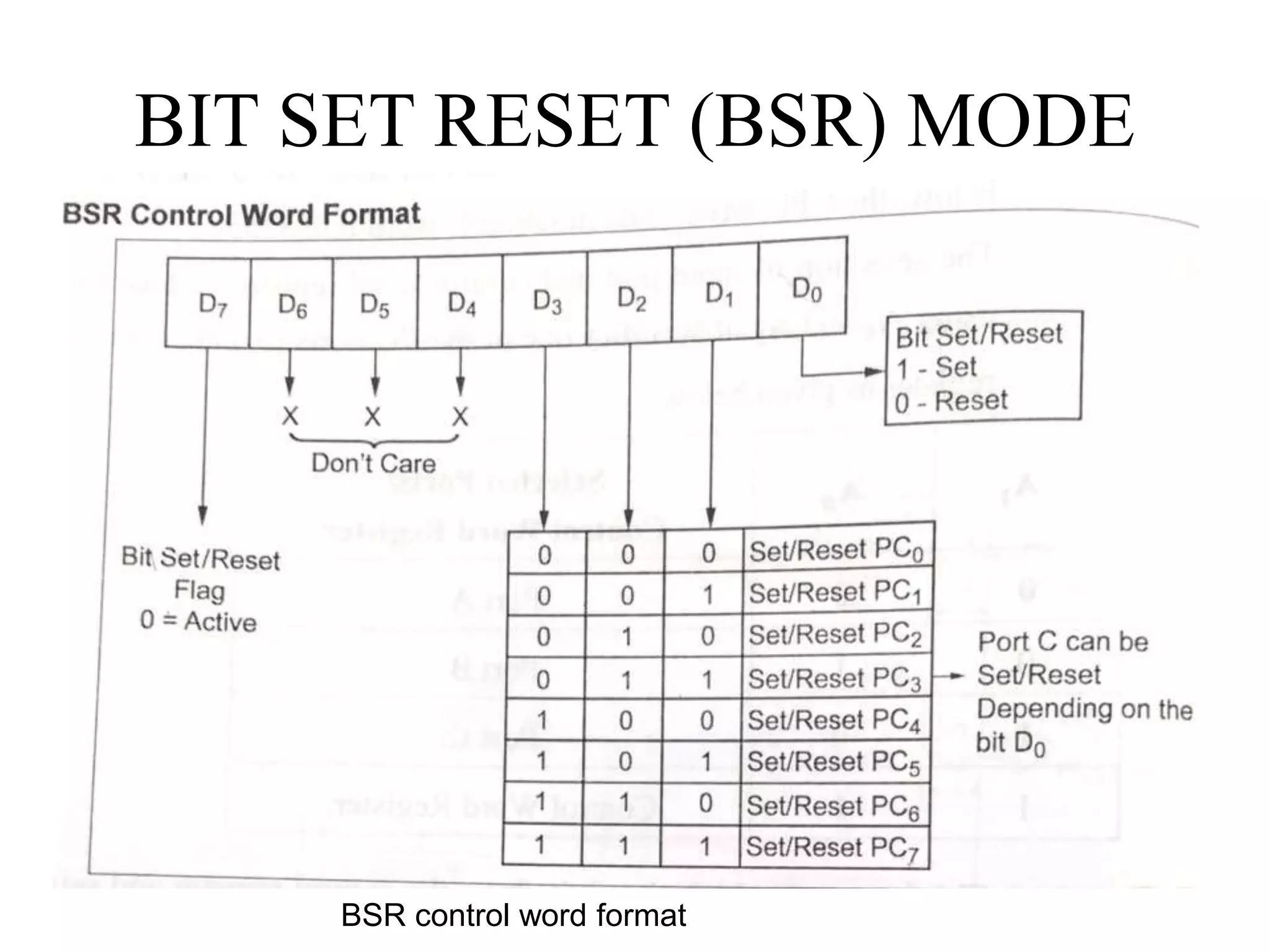
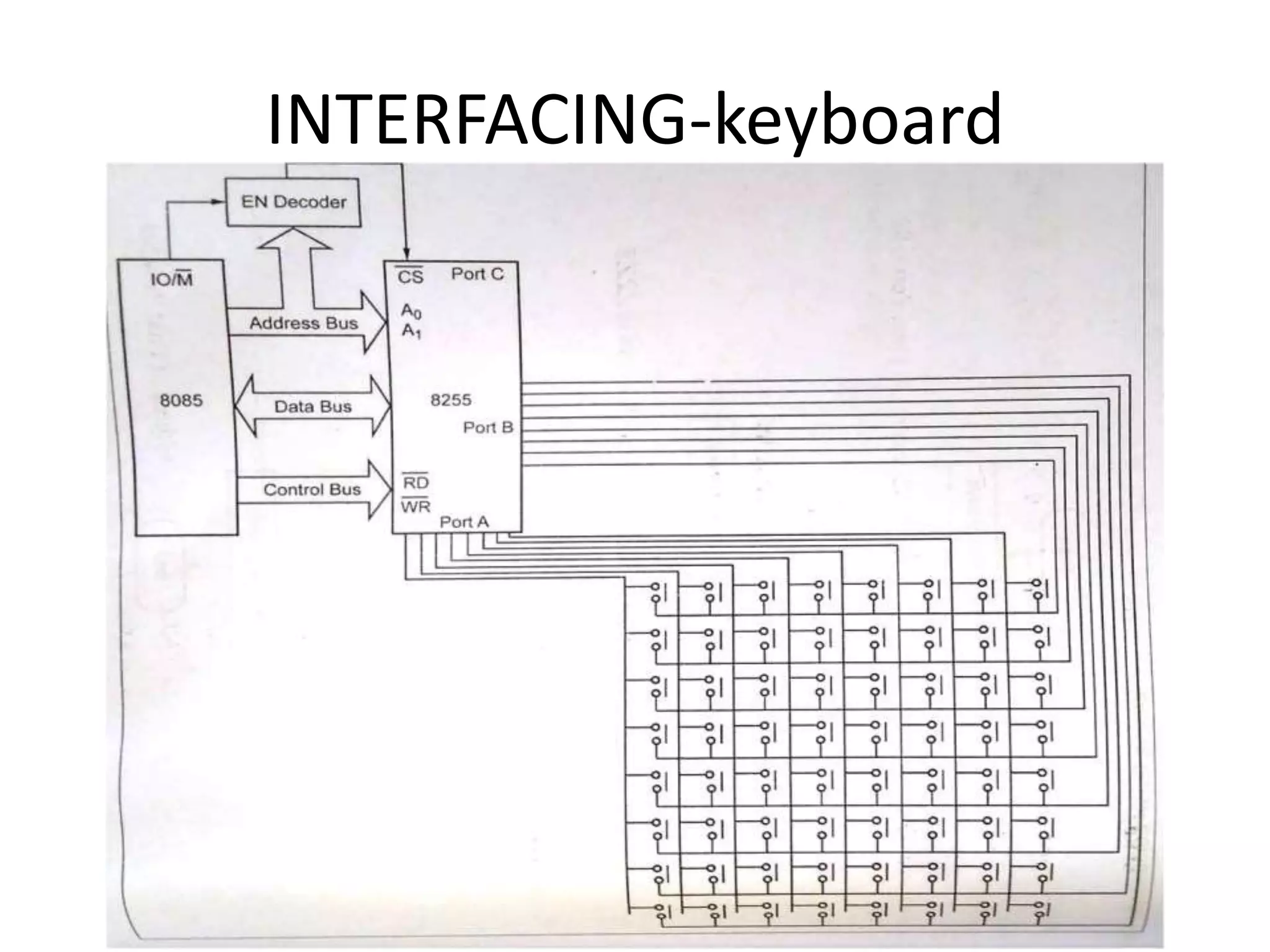
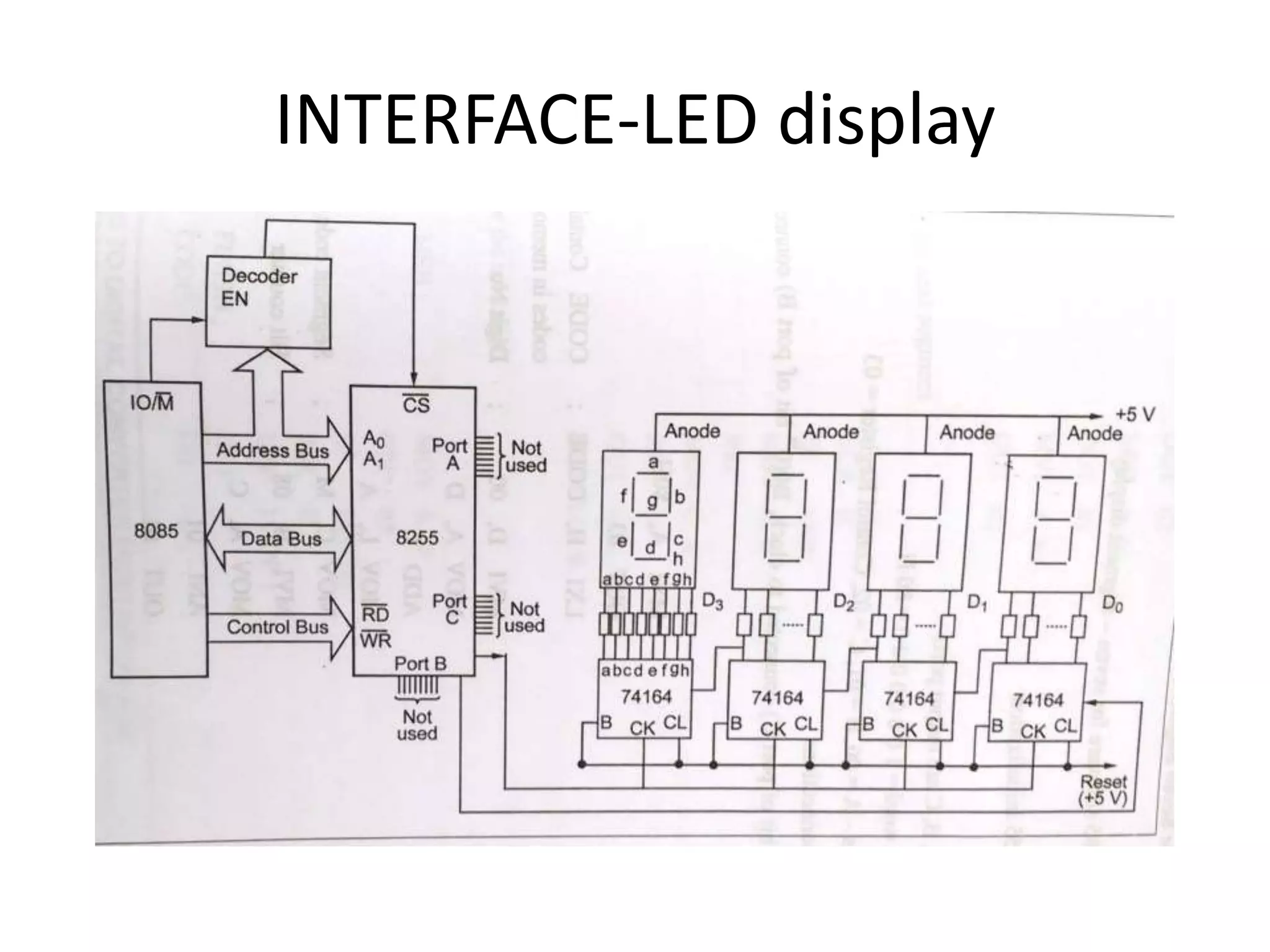
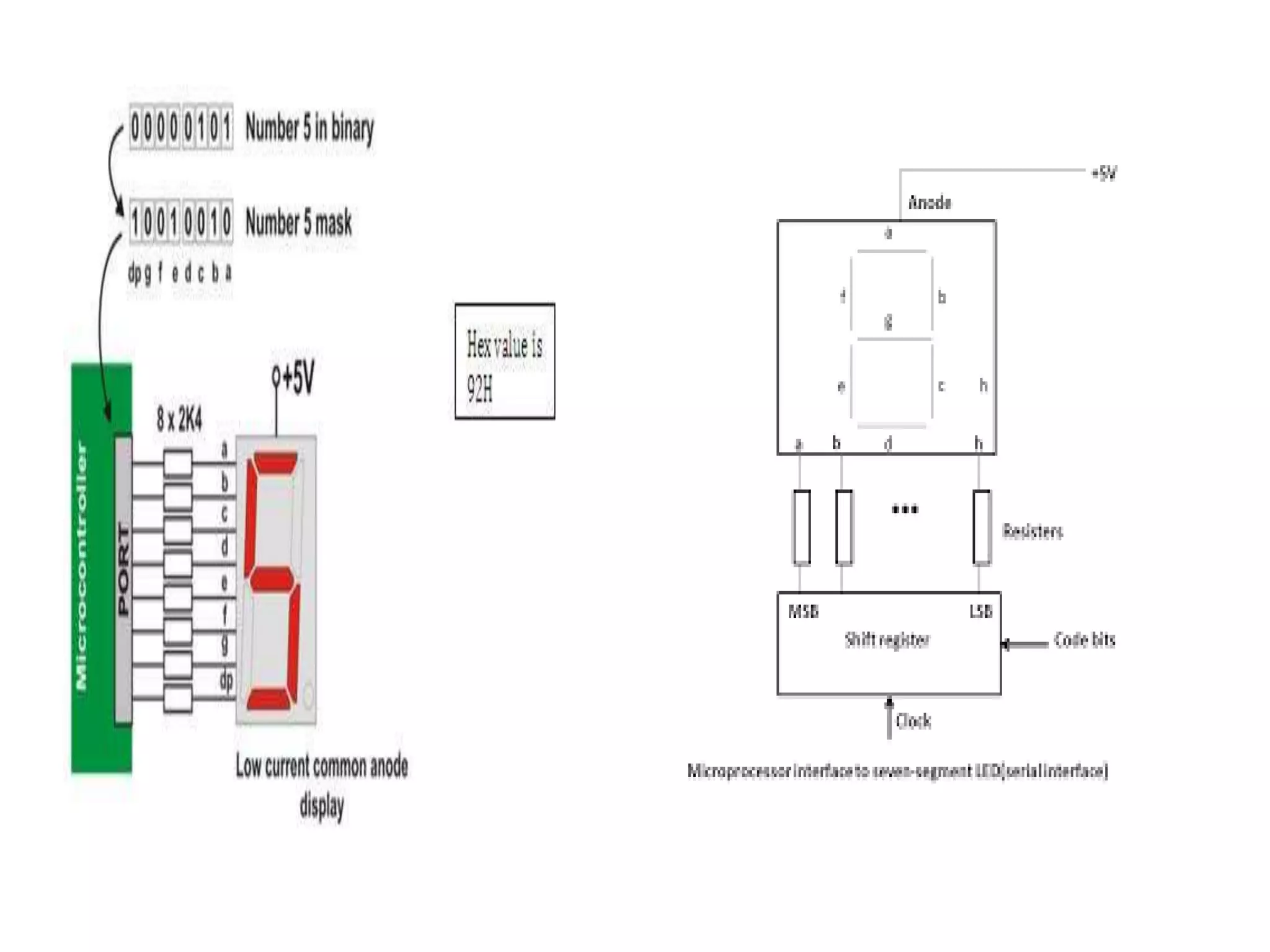
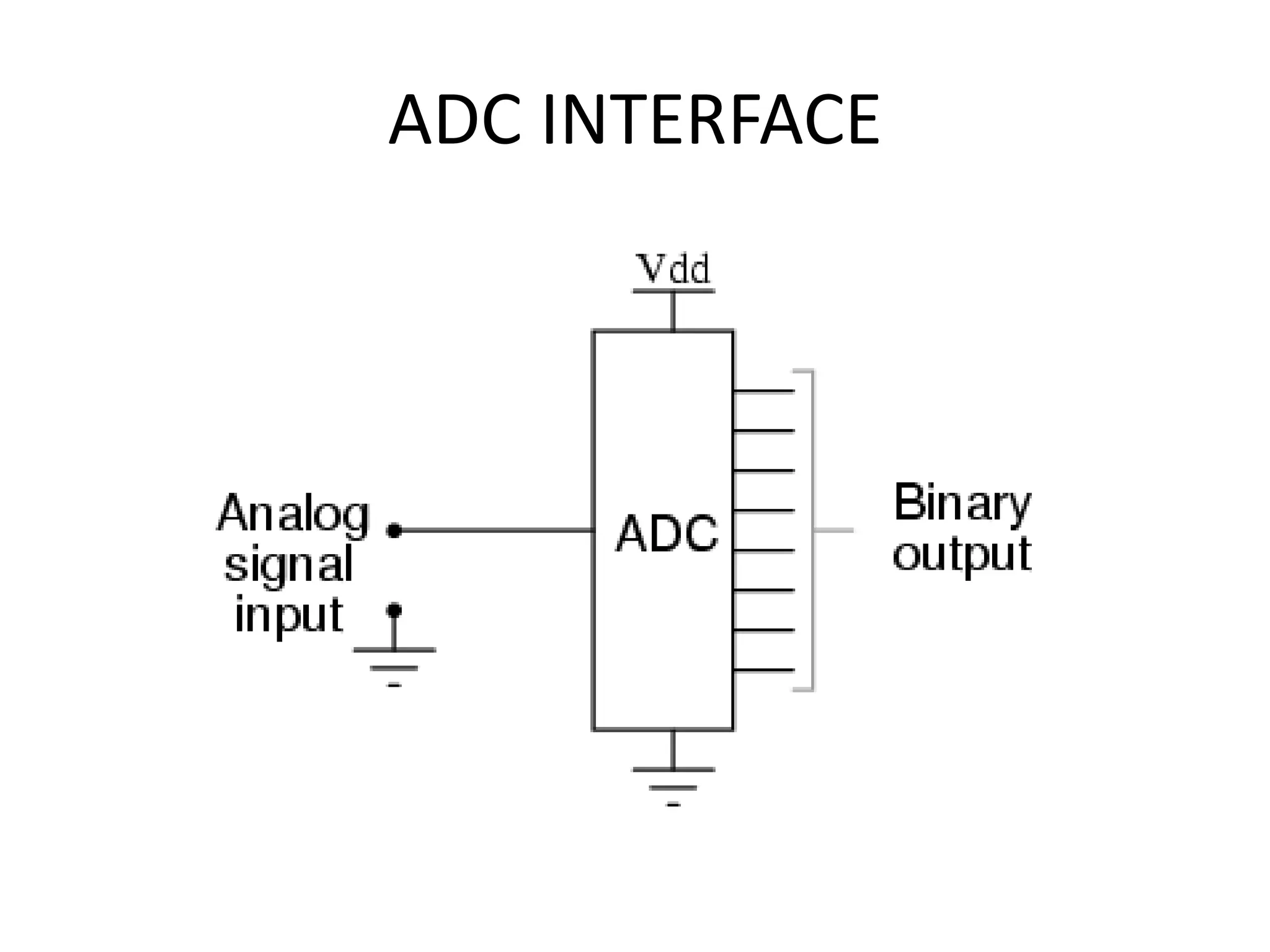
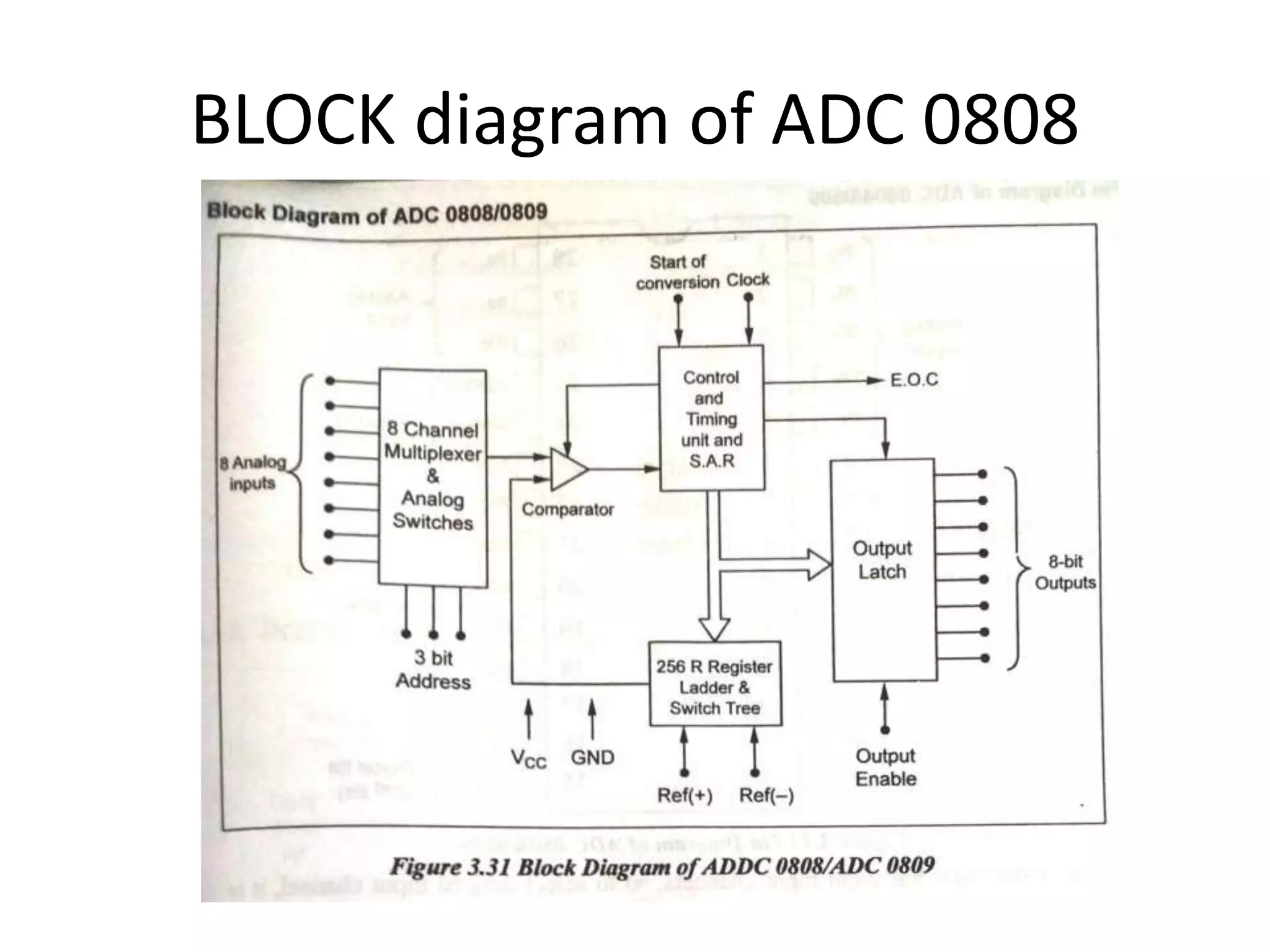
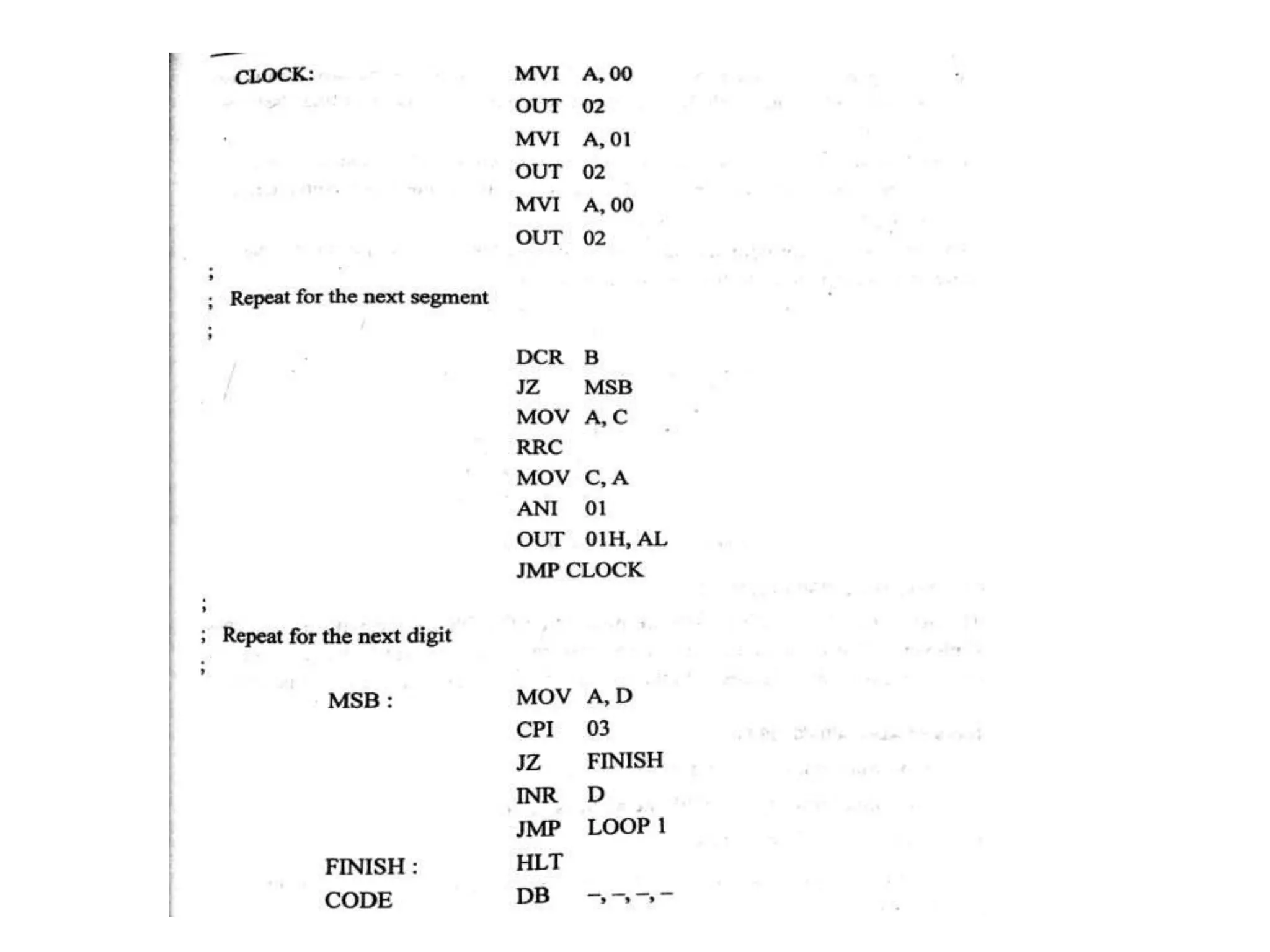
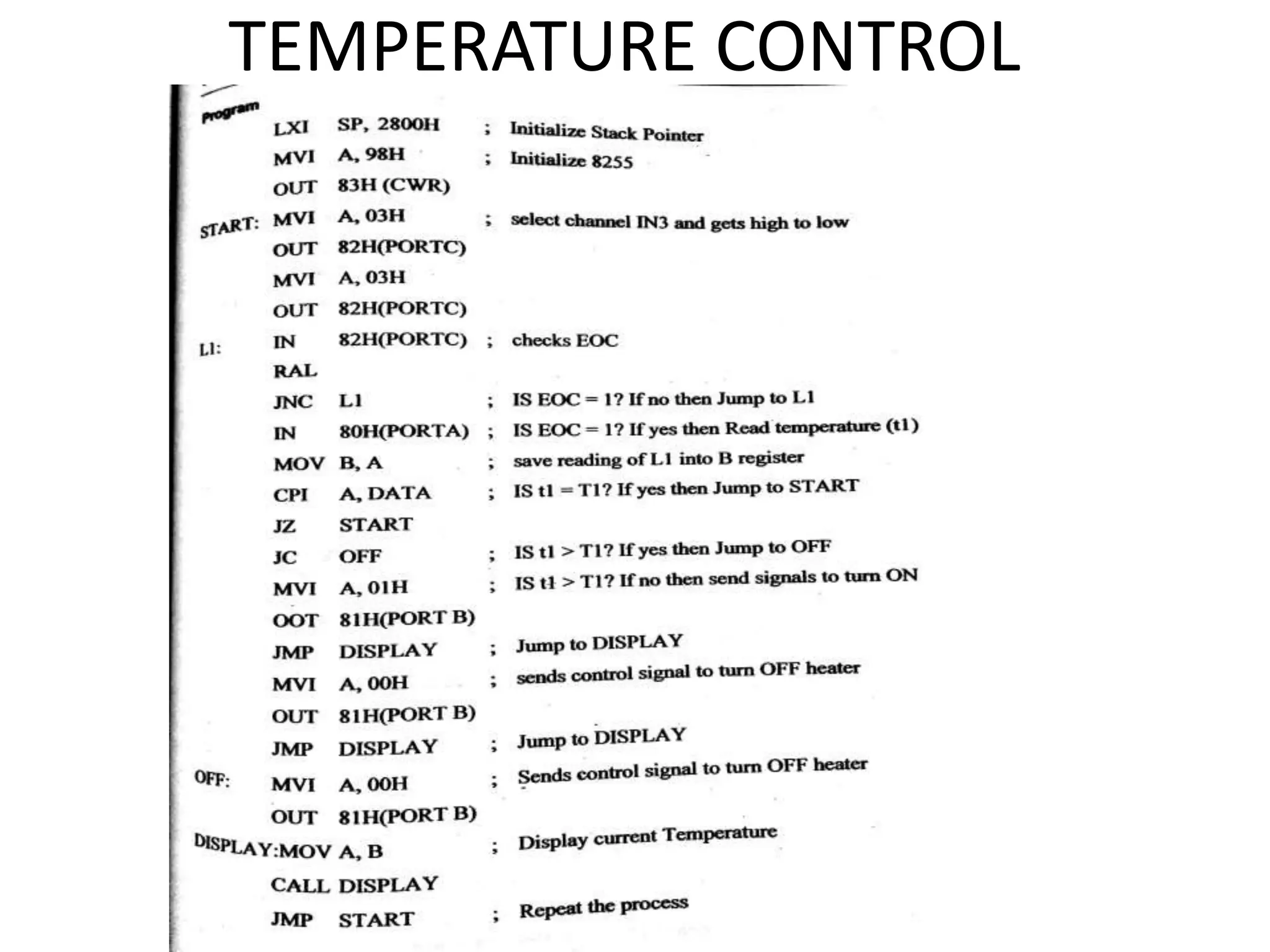
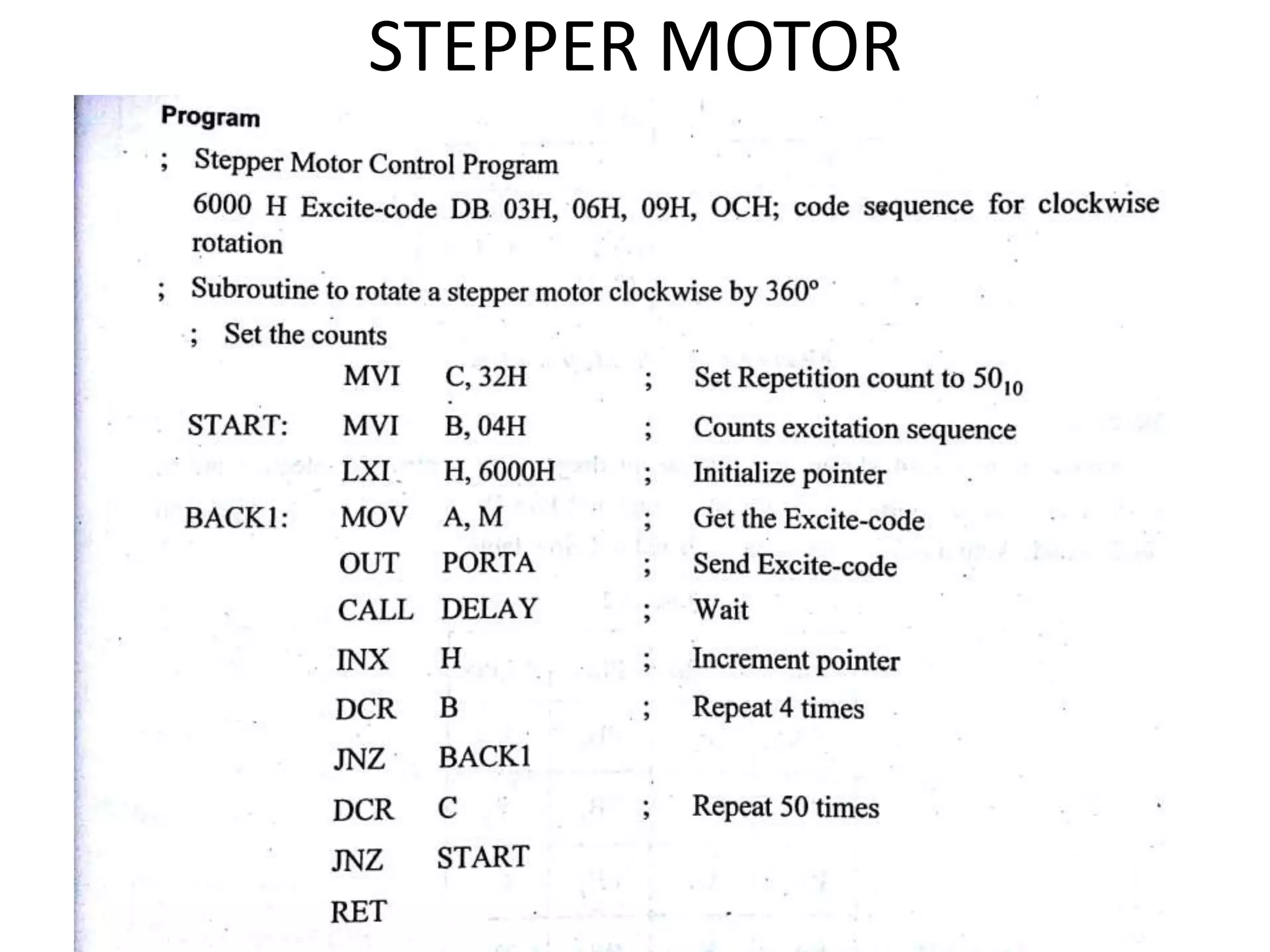
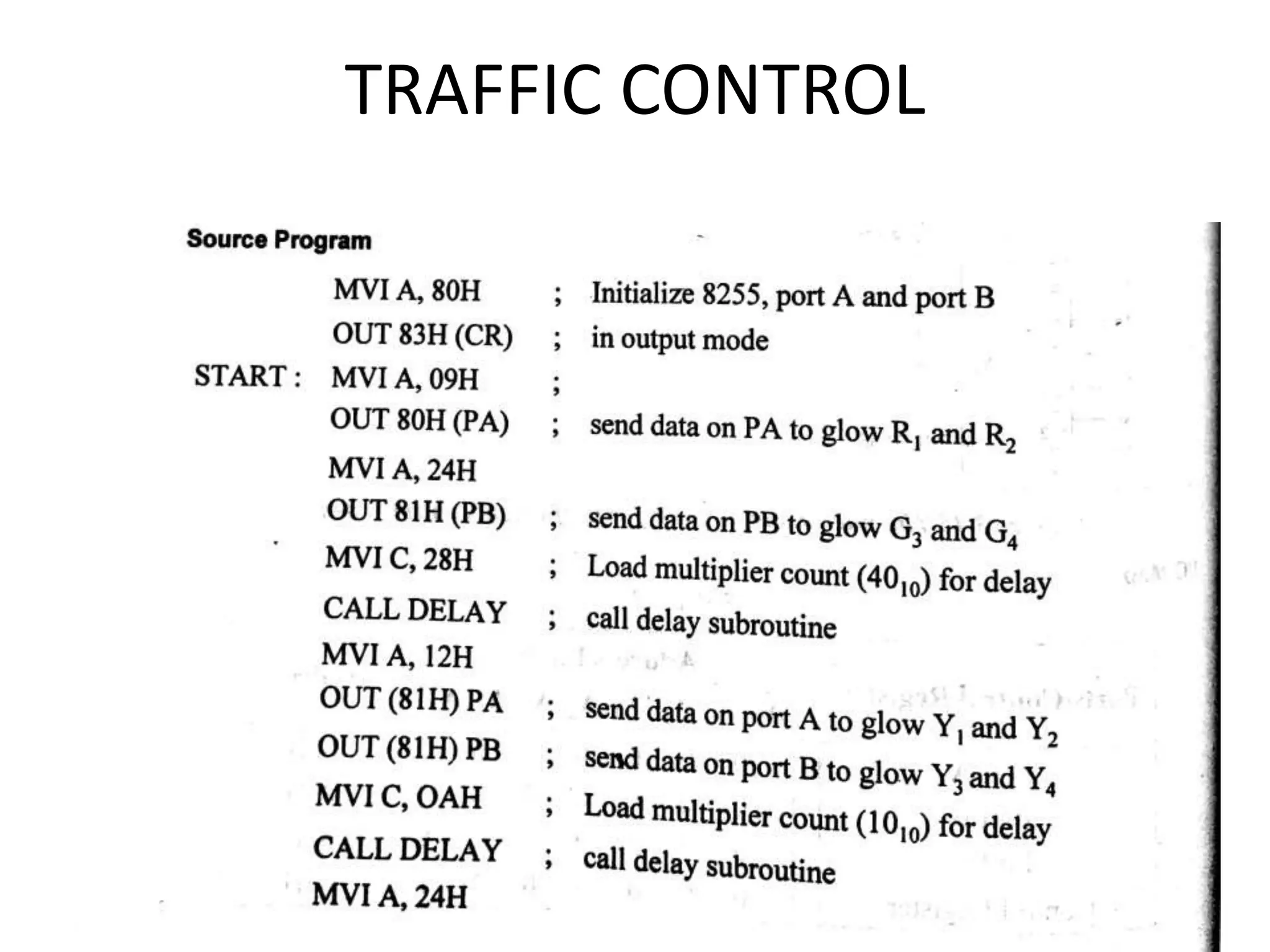

This document discusses various programmable peripheral interface chips used for input/output interfacing in microprocessor systems. It describes the architecture and programming of the 8255 Programmable Peripheral Interface chip, which allows flexible configuration of three 8-bit ports. Application examples discussed include interfacing keyboards, LED displays, analog-to-digital converters, digital-to-analog converters, temperature sensors, and stepper motors. Memory mapped and I/O mapped addressing schemes for connecting peripherals are also summarized.