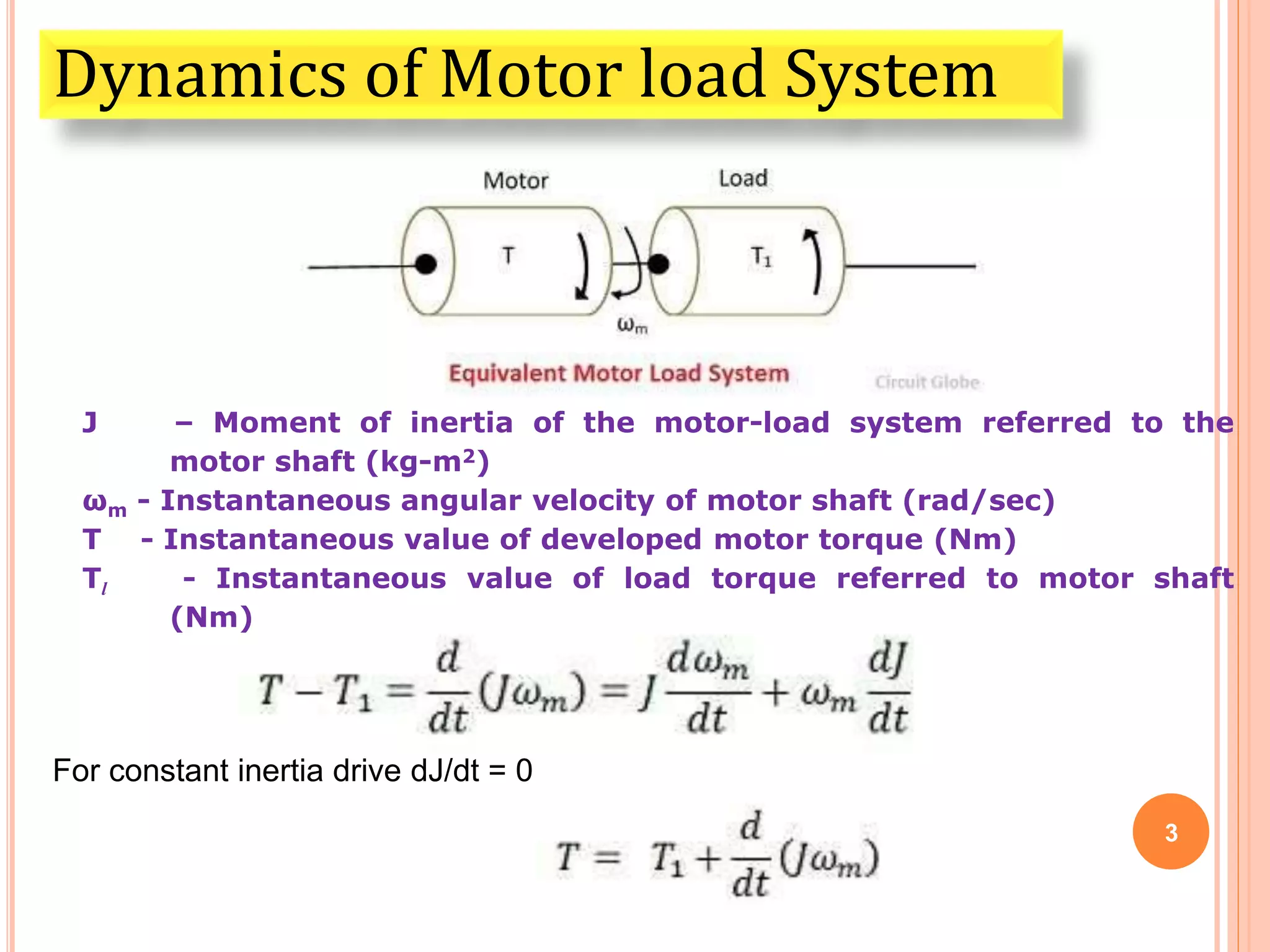
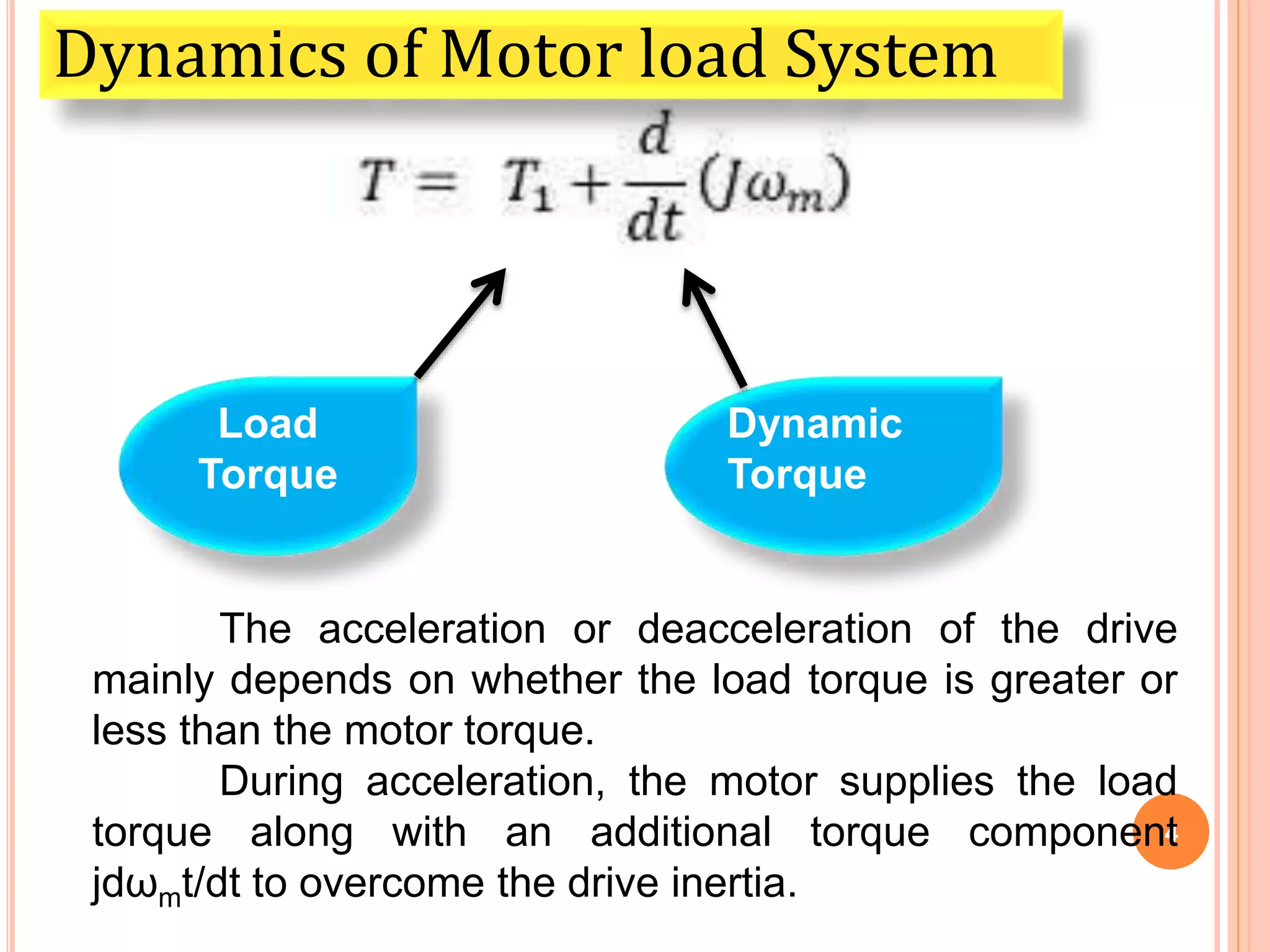
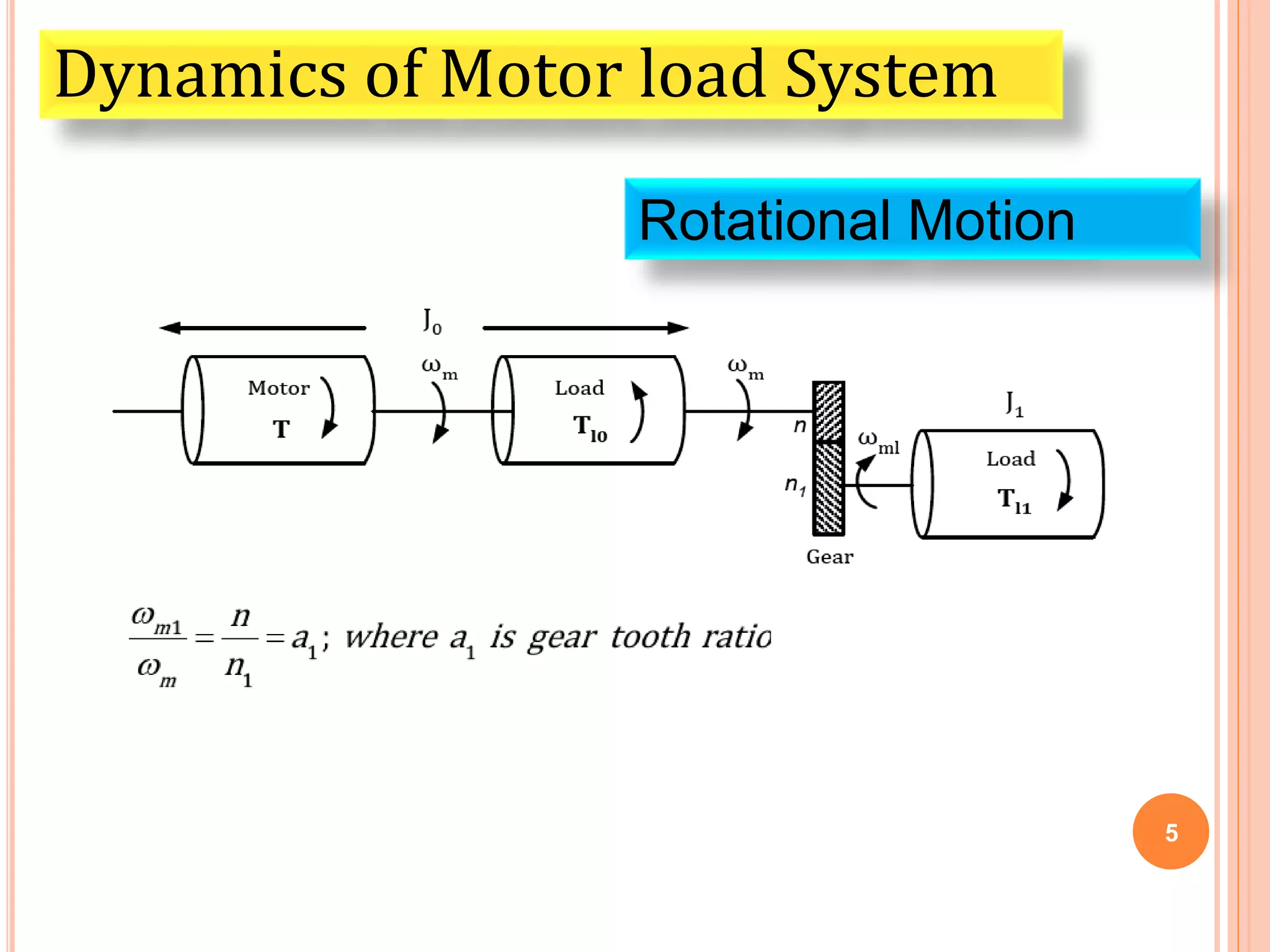
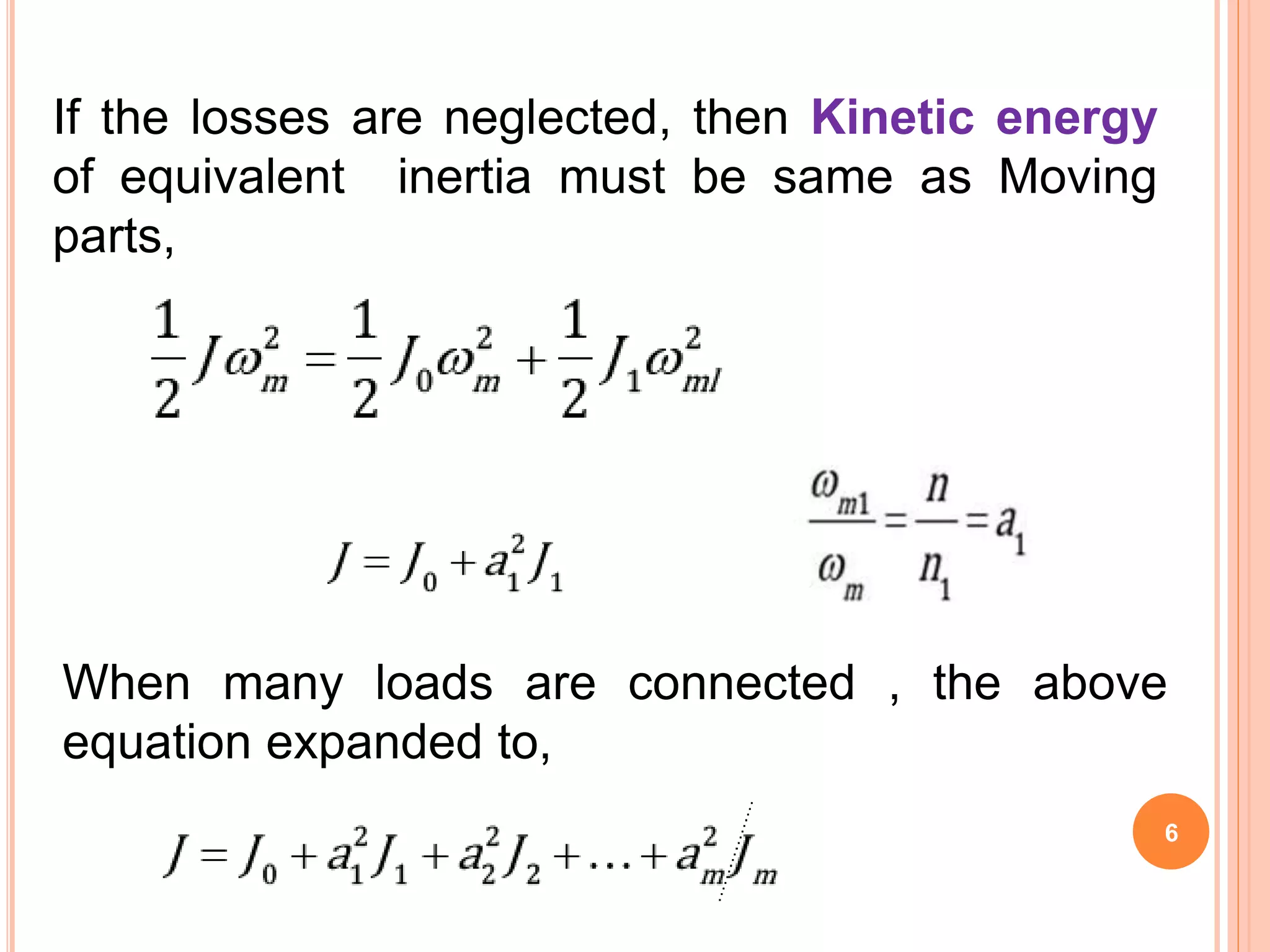
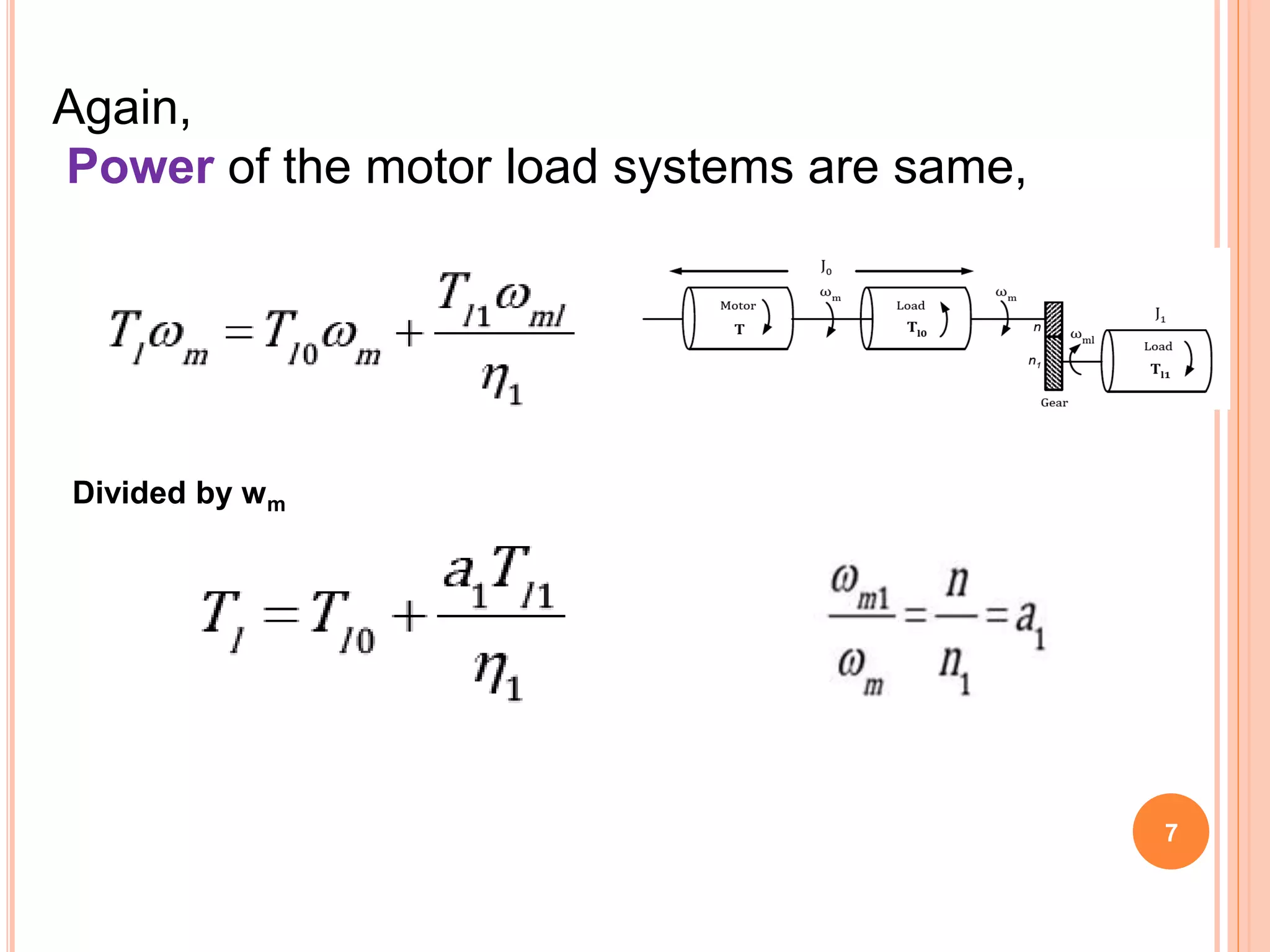
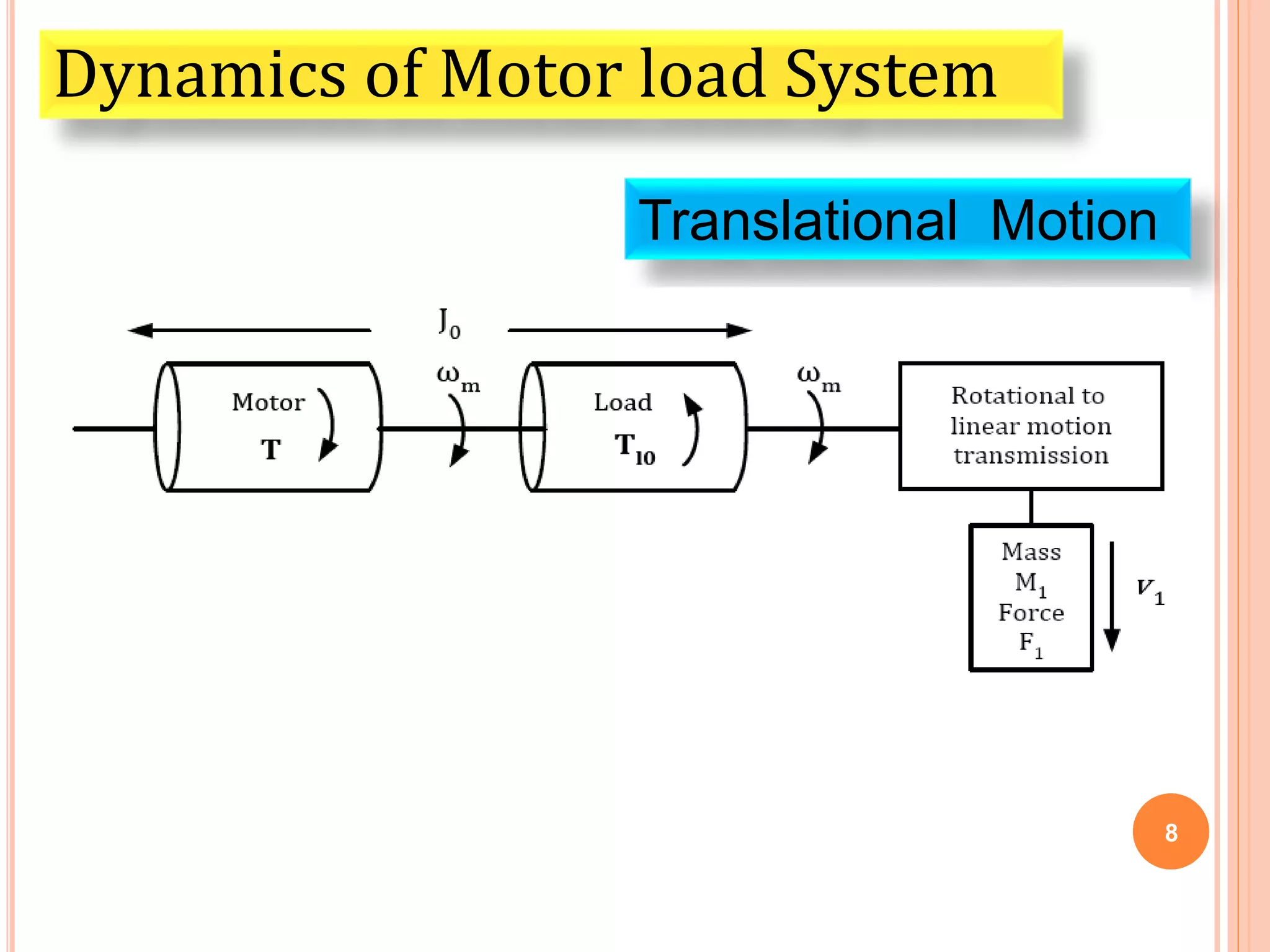
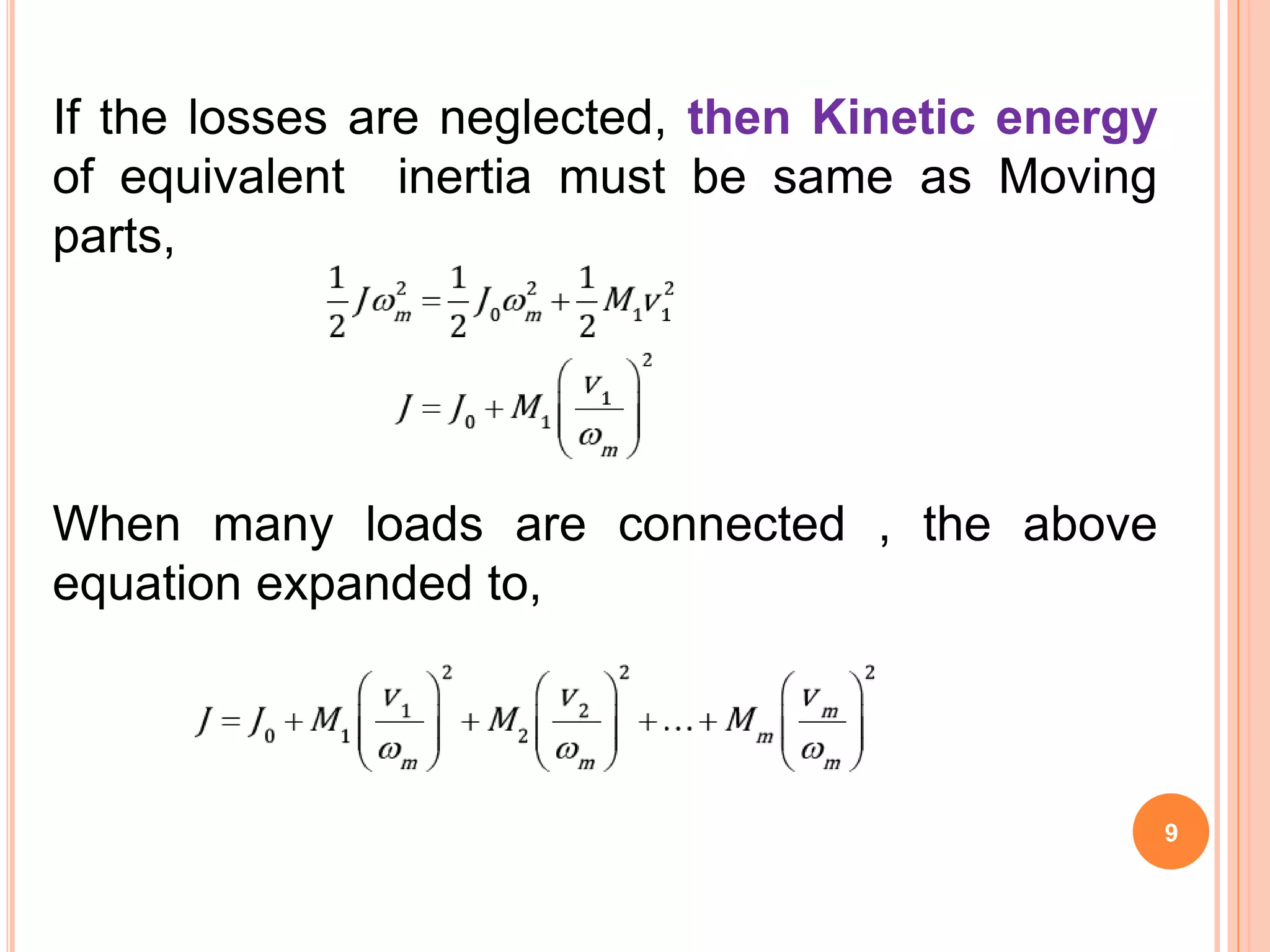
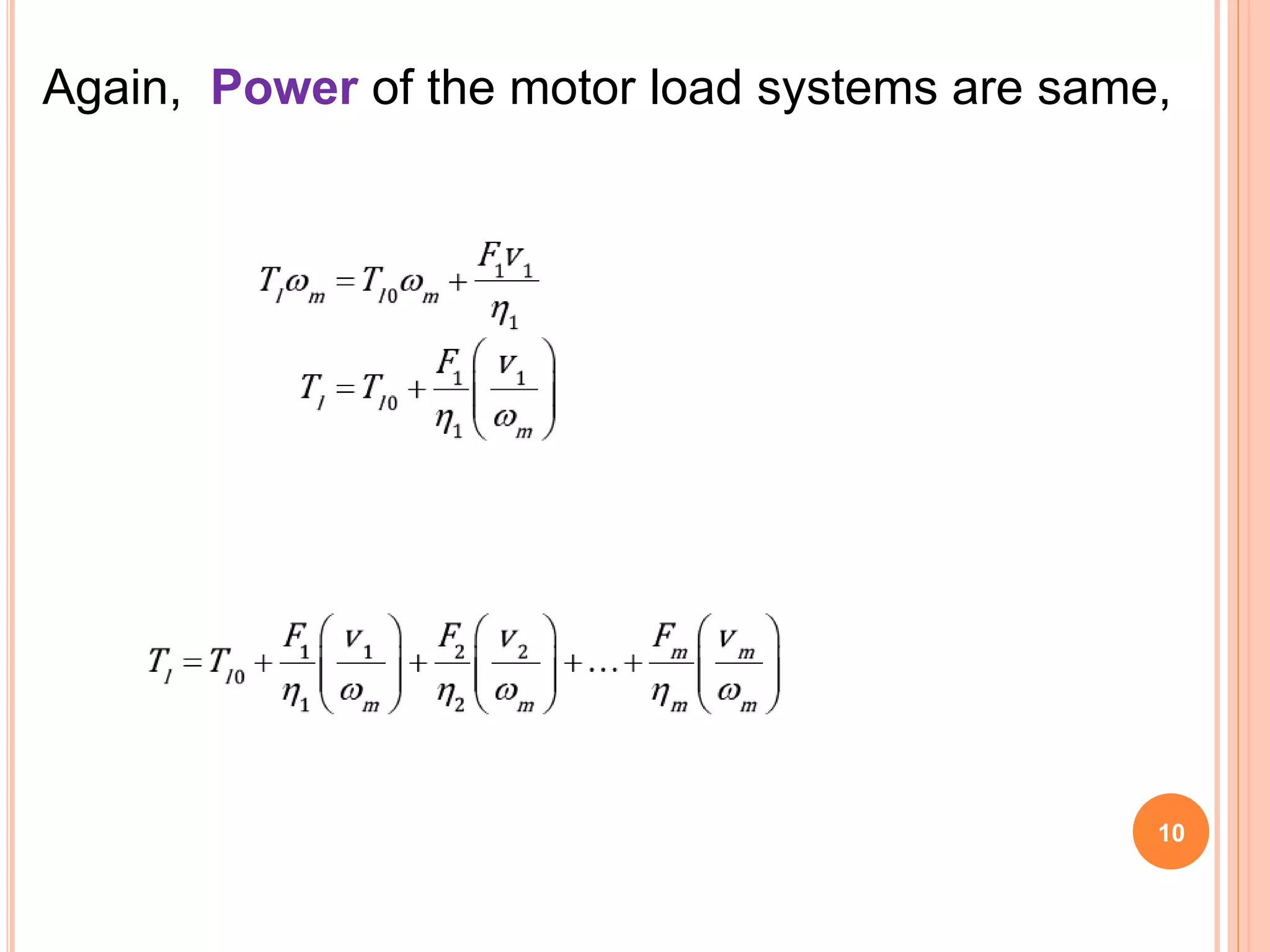
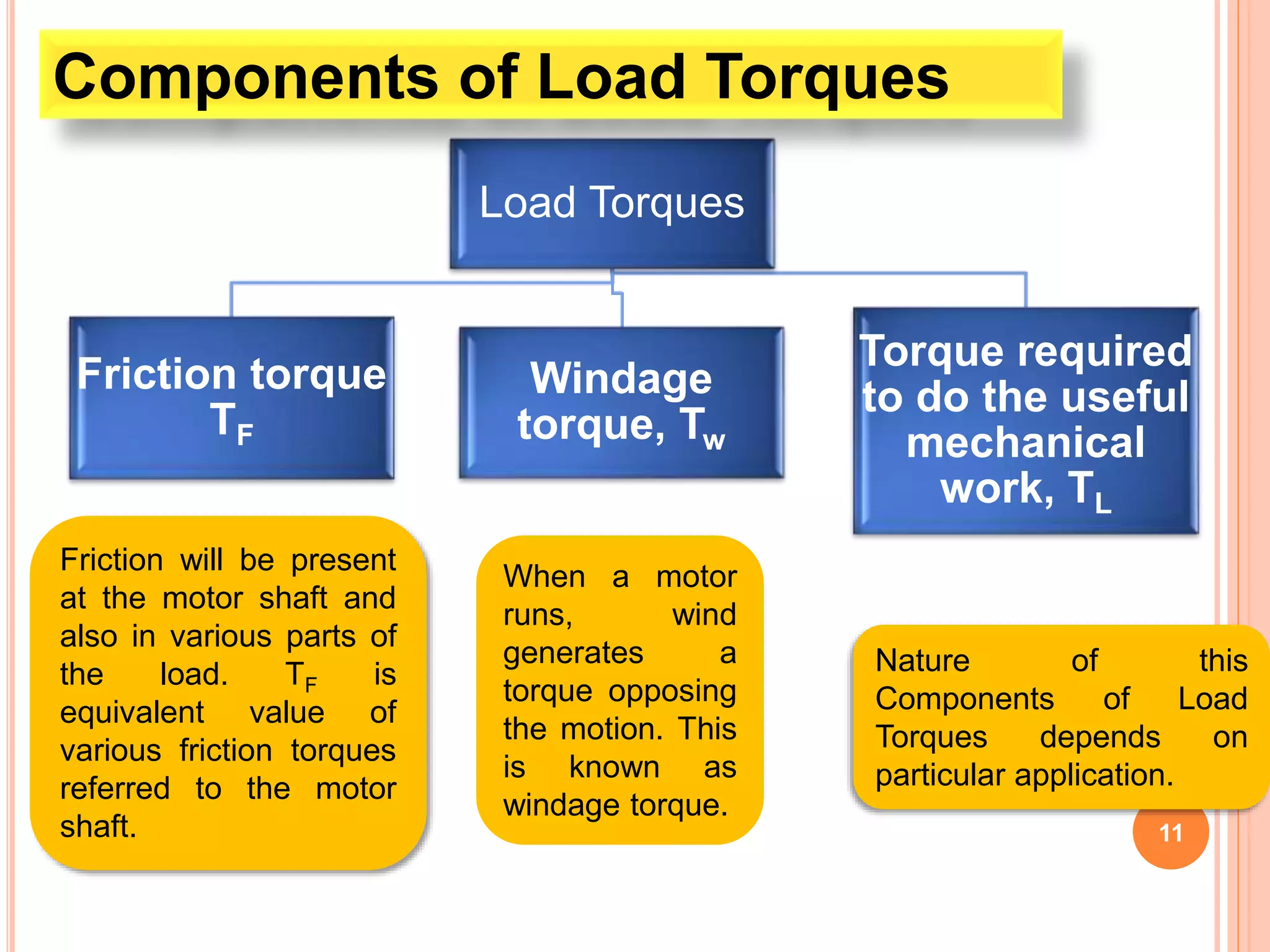
This document discusses equations governing the dynamics of a motor load system. It defines key terms like moment of inertia (J), angular velocity (ωm), motor torque (T), and load torque (Tl). It explains that during acceleration, the motor supplies the load torque plus an additional torque (Jdωm/dt) to overcome inertia. Load torques can include friction torque (TF), windage torque (Tw), and torque required for useful work (TL). Load torques are classified as either active if they can drive the motor, or passive if they always oppose motion. Different load types can have torque proportional to speed, speed squared, or inversely with speed.