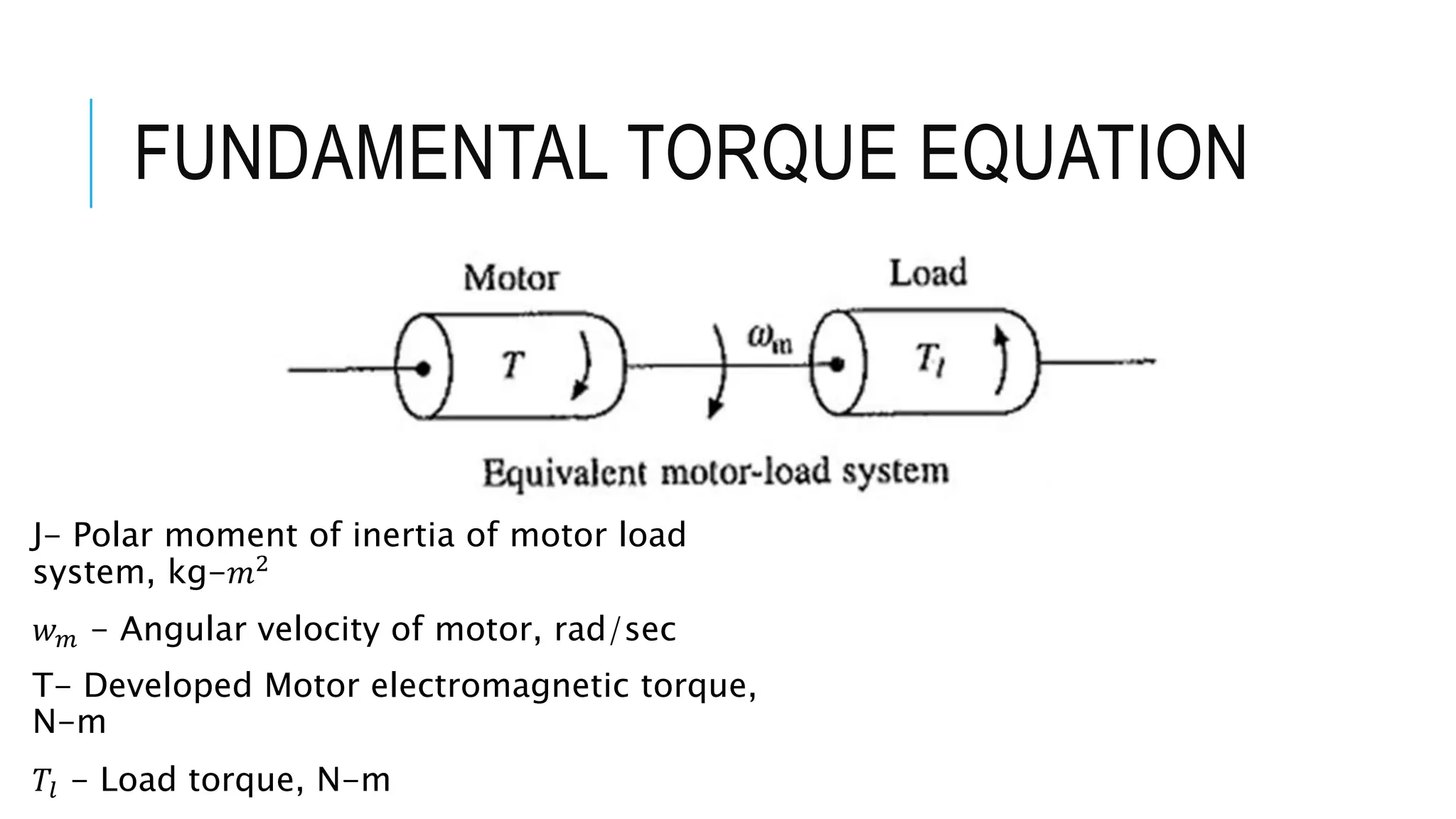
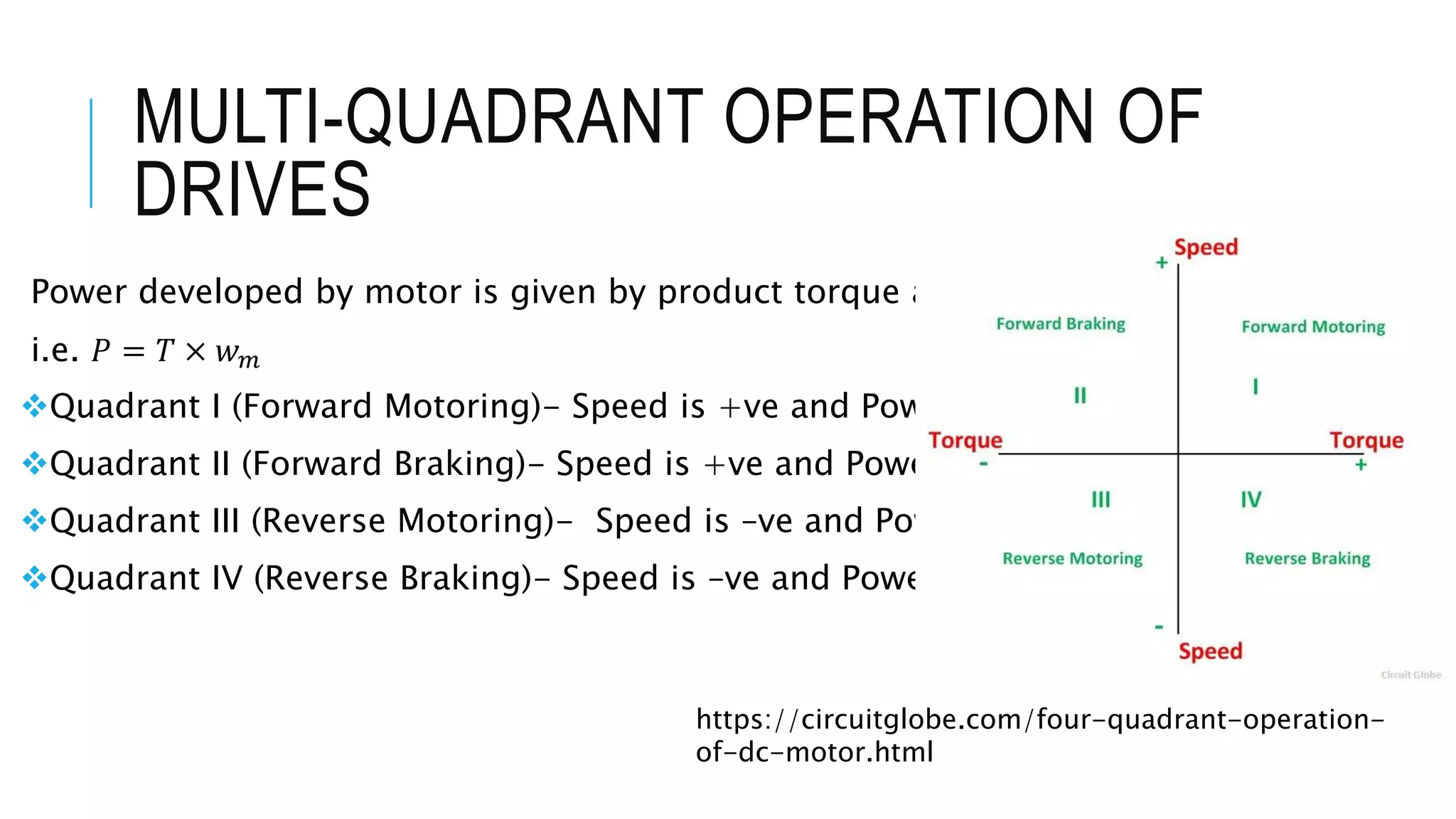
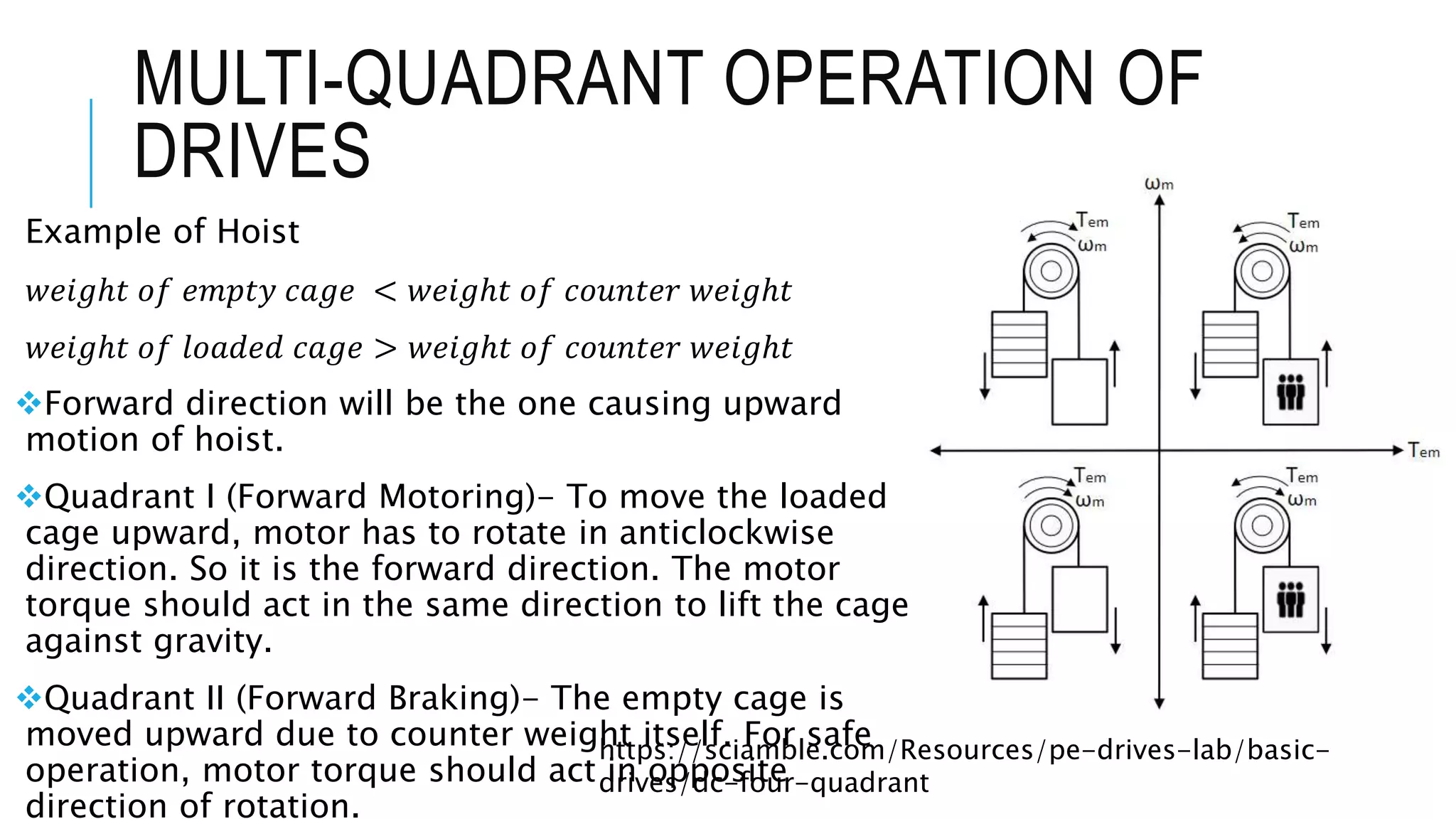
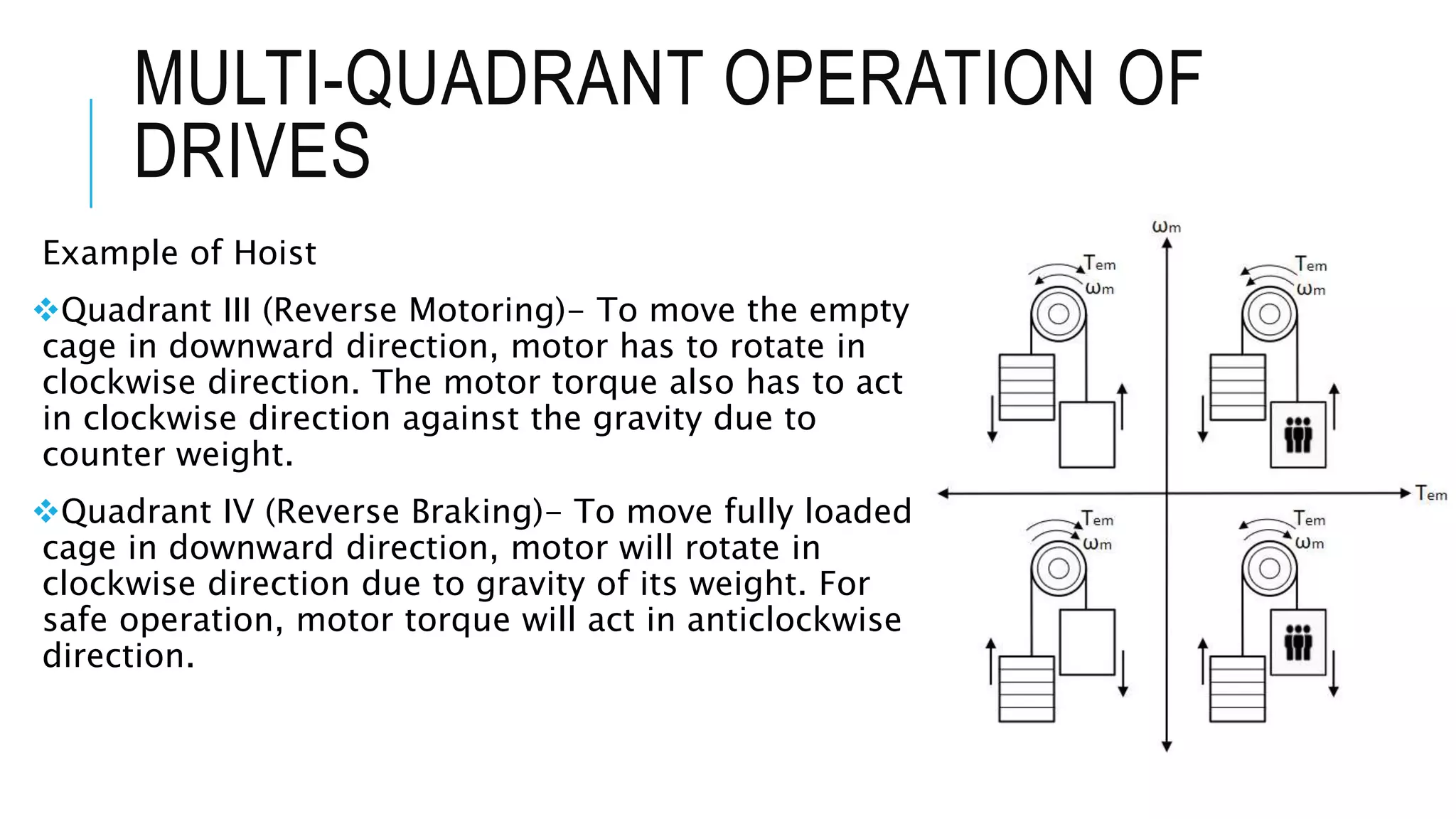
The document outlines fundamental torque equations and dynamics of electrical drives, focusing on the relationship between developed motor torque and load torque. It describes the multi-quadrant operation of drives, including modes of operation like motoring and braking, and explains the sign conventions for speed and torque. Additionally, examples involving hoist operations are provided to illustrate the practical applications of multi-quadrant operations.