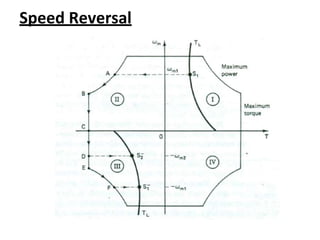
The document discusses electric drives and their characteristics. It describes the key parts of electric drives including the power modulator, control unit, and sensing unit. The power modulator regulates power from the source to the motor. The control unit controls the power modulator and protects the system. The sensing unit measures parameters like motor current and speed. Electric drives offer advantages like wide operating ranges and flexible control but have higher initial costs than other drive types. Load torques on electric drives include friction, windage, and torque for useful work. Drives can operate in different modes including constant torque, constant power, and all four quadrants of the speed-torque plane. Both steady state and transient stability are important considerations.