Downloaded 407 times
![PRINCIPLE OF OPERATION
When three currents, 120 electrical degrees apart, pass through the three single-phase windings in
the slots of the stator core, a rotating magnetic field is developed. This field travels around the stator.
The speed of the rotating field depends on the number of stator poles and the frequency of the
power source. This speed is called the synchro nous speed. It is determined by applying the formula
which was used to find the synchro nous speed of the rotating field of squirrel-cage induction motors.
Synchronous speed in RPM = [120 x frequency in hertz / number of poles] or S =120 x F / P
S= 120 x f/P
As the rotating field travels at synchronous speed, it cuts the three-phase winding of the rotor
and induces voltages in this winding. The rotor winding is connected to the three slip rings mounted
on the rotor shaft. The brushes riding on the slip rings connect to an external wye-connected group of
resistors (speed controller), figure 5. The induced voltages in the rotor windings set up currents which
follow a closed path from the rotor winding to the wye-connected speed controller. The rotor
currents create a magnetic fieldin the rotor core based on transformer action. This rotor field reacts
with the stator field to develop the torque which causes the rotor to turn. The speed controller is
sometimes called the secondary resistance control.](https://image.slidesharecdn.com/choiceofselectionofstatorrotorslot-171012045318/75/Design-of-stator-rotor-for-Wound-Induction-Motor-5-2048.jpg)
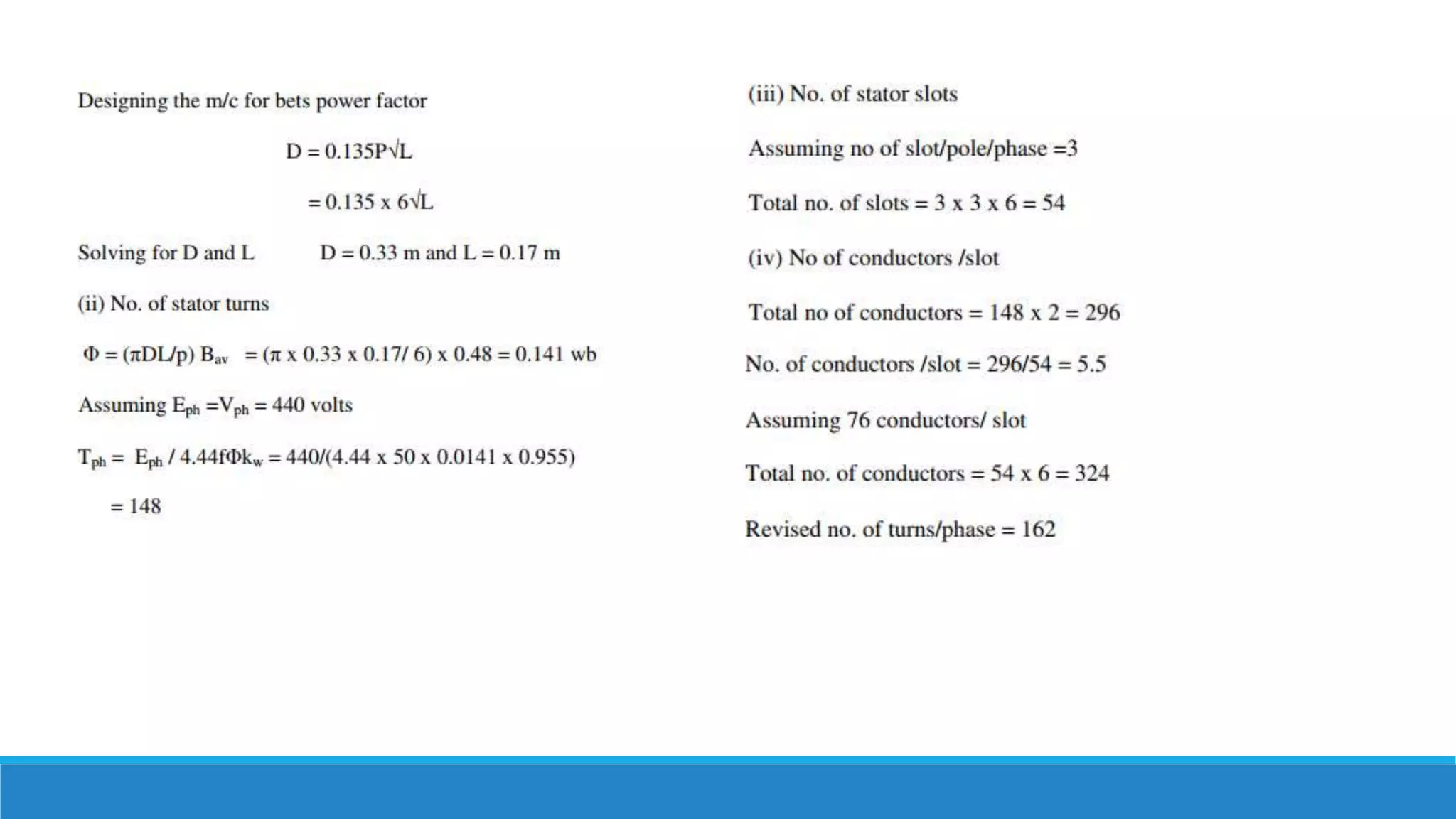
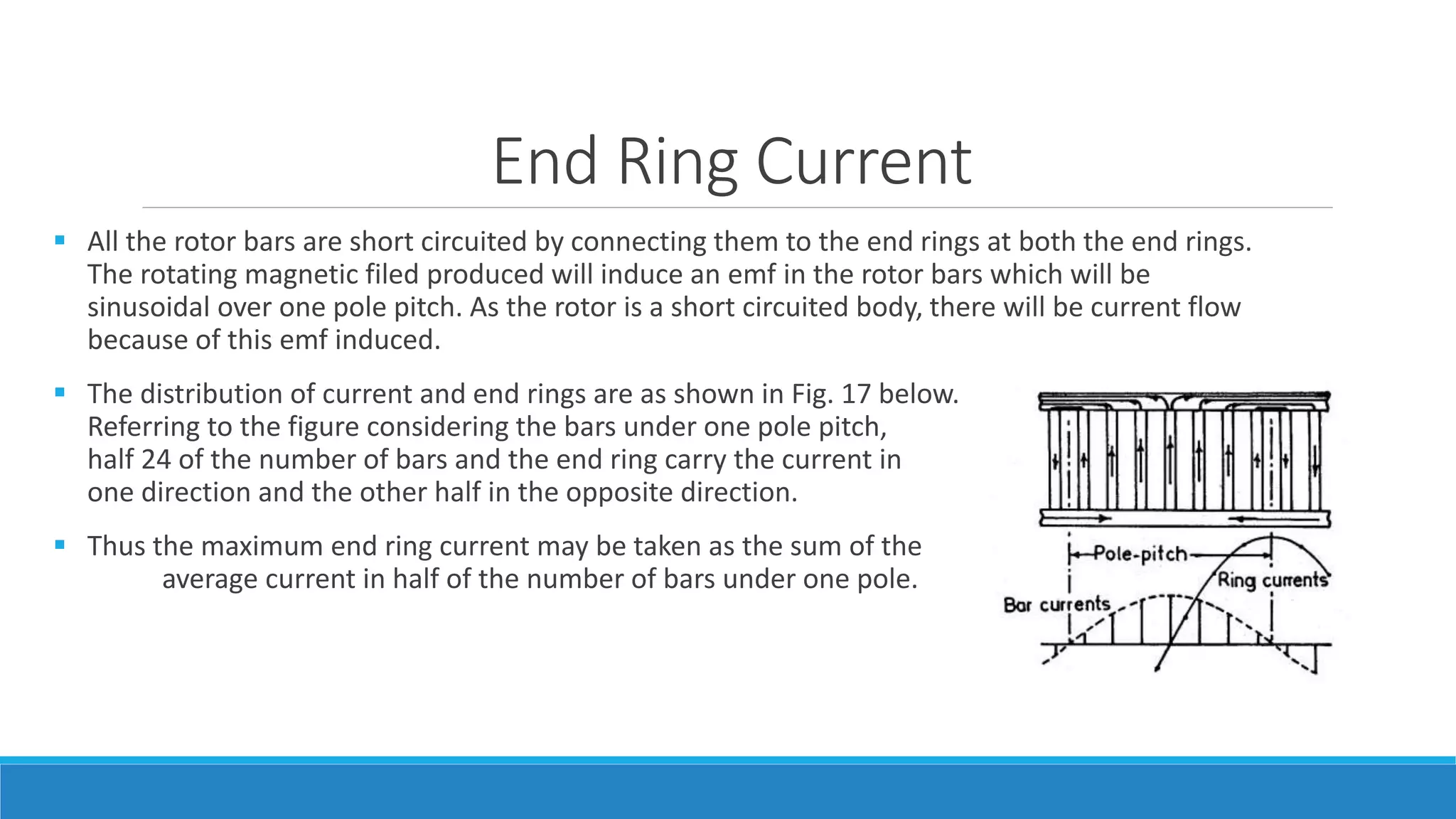
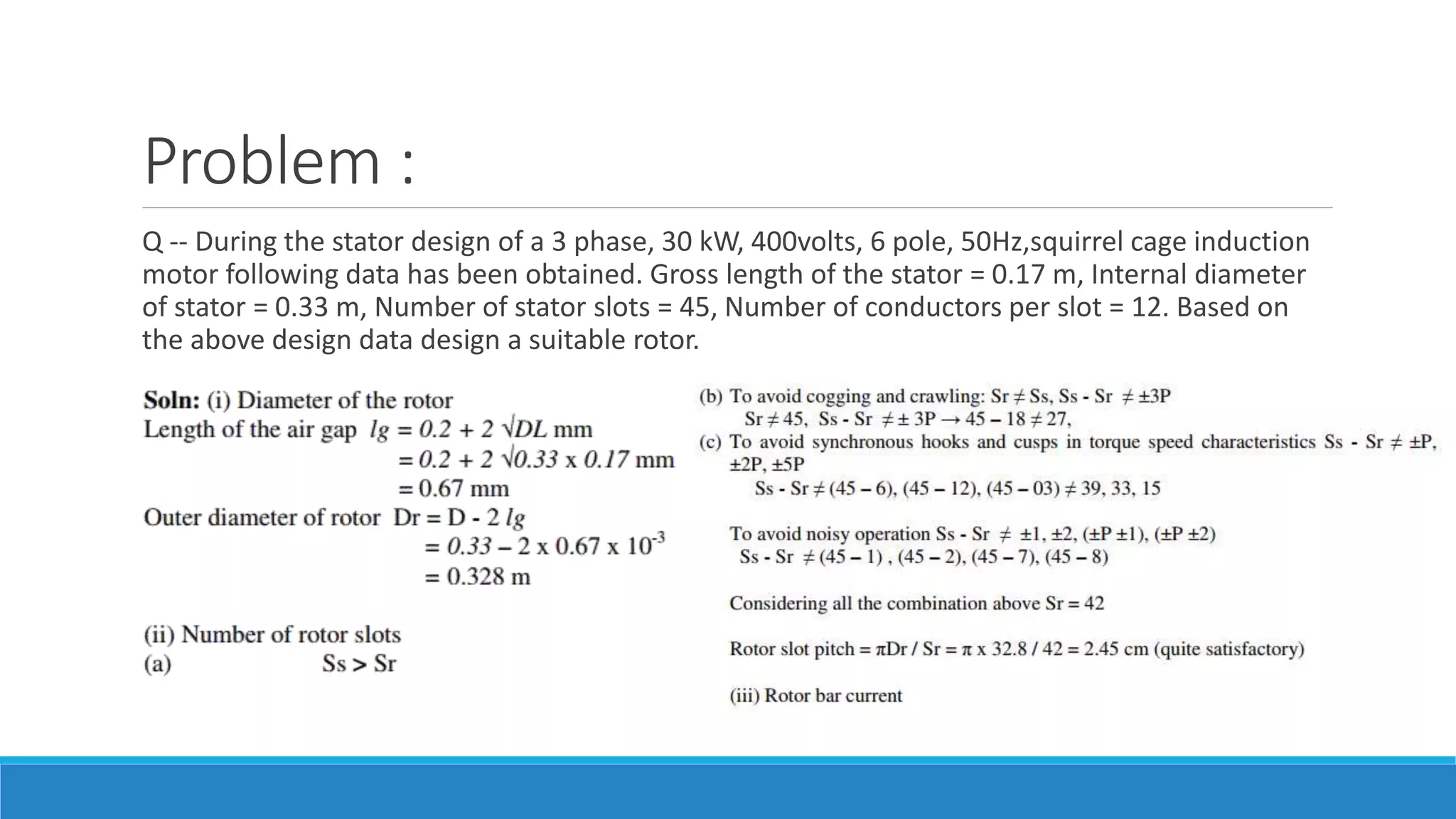
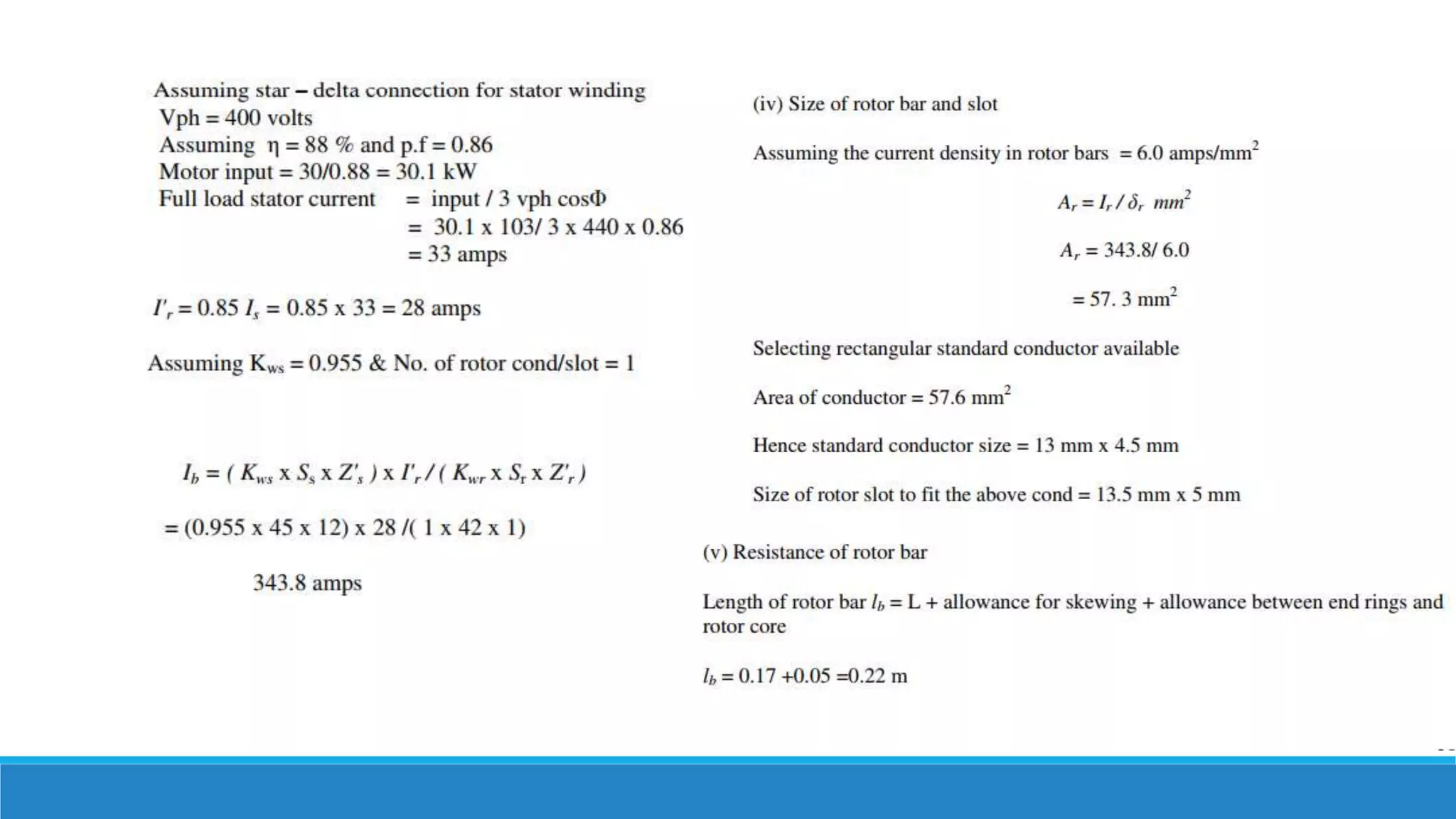
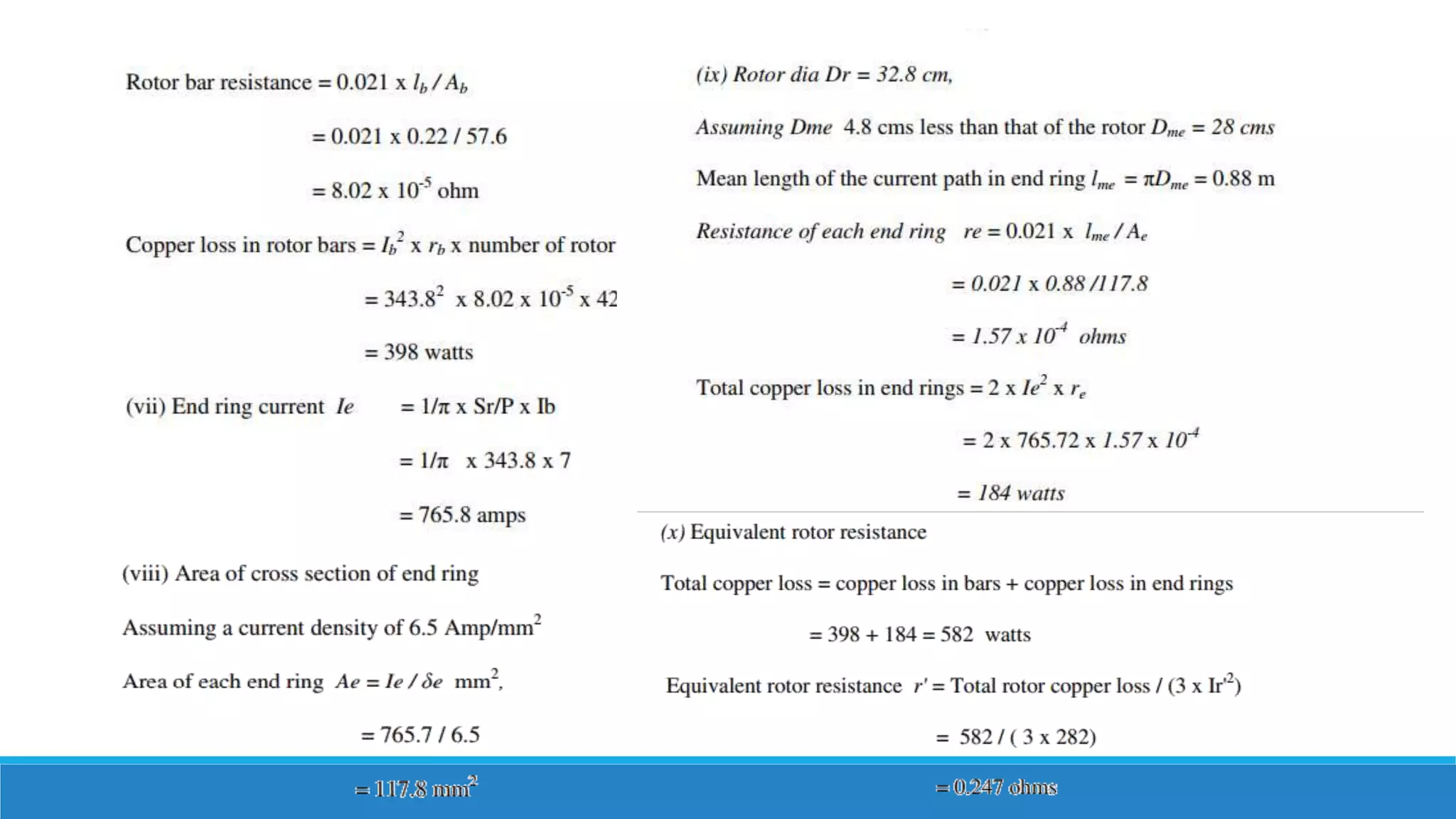

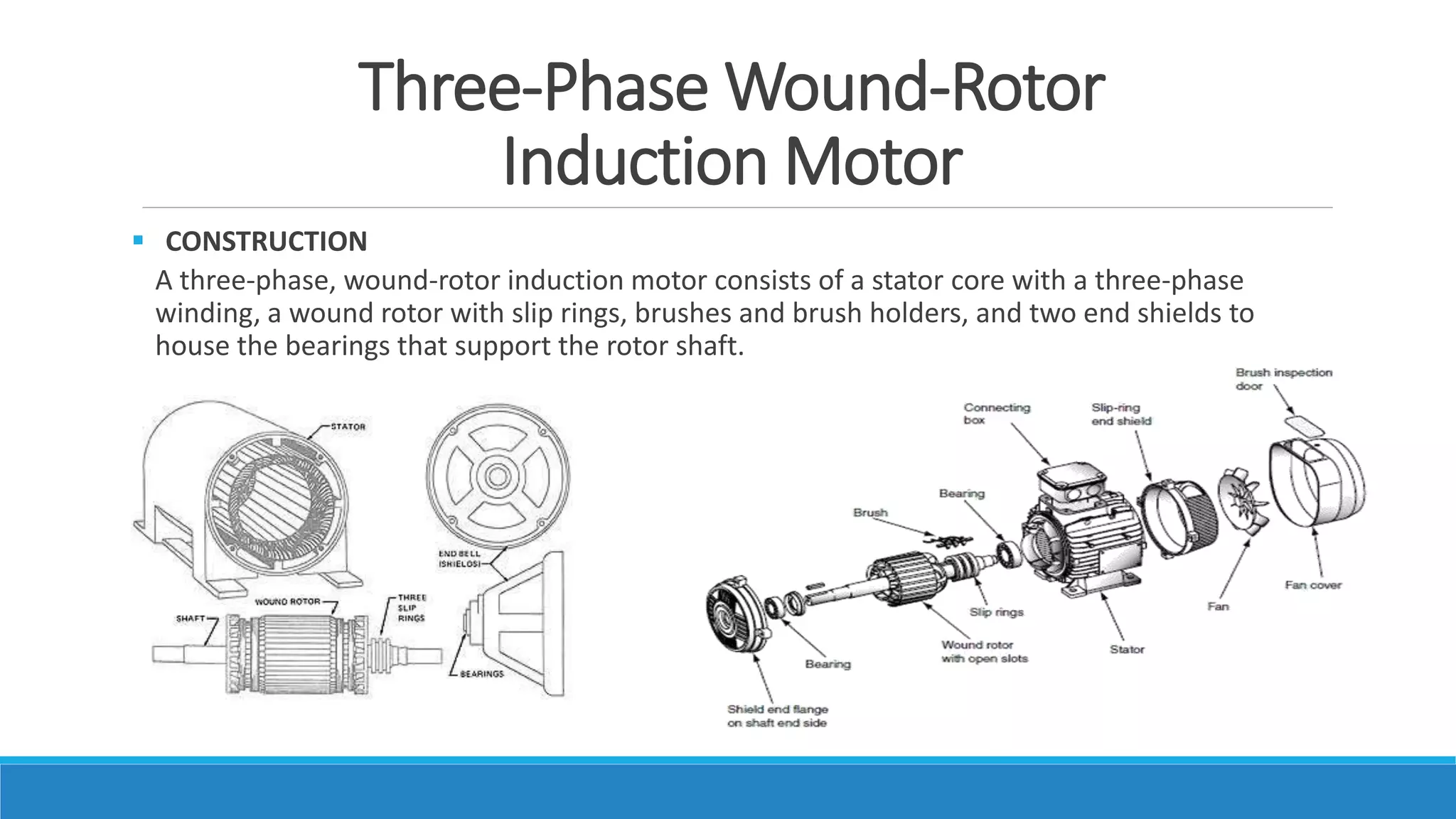
The document provides details on the design of stator and rotor slots for a 3-phase wound-rotor induction motor. It discusses the construction of the motor including the stator core and winding, wound rotor with slip rings, and end shields. For stator design, it describes slot types, selection of number of slots, conductor cross-section, slot area and size, length of mean turn and resistance calculation. For rotor design, it discusses air gap length, number of rotor slots selection to avoid crawling and cogging, end ring current, design of wound rotor including number of turns and rotor current calculation. It provides an example design problem for a 30kW squirrel cage induction motor and asks to design a suitable rotor














































































