Downloaded 1,250 times
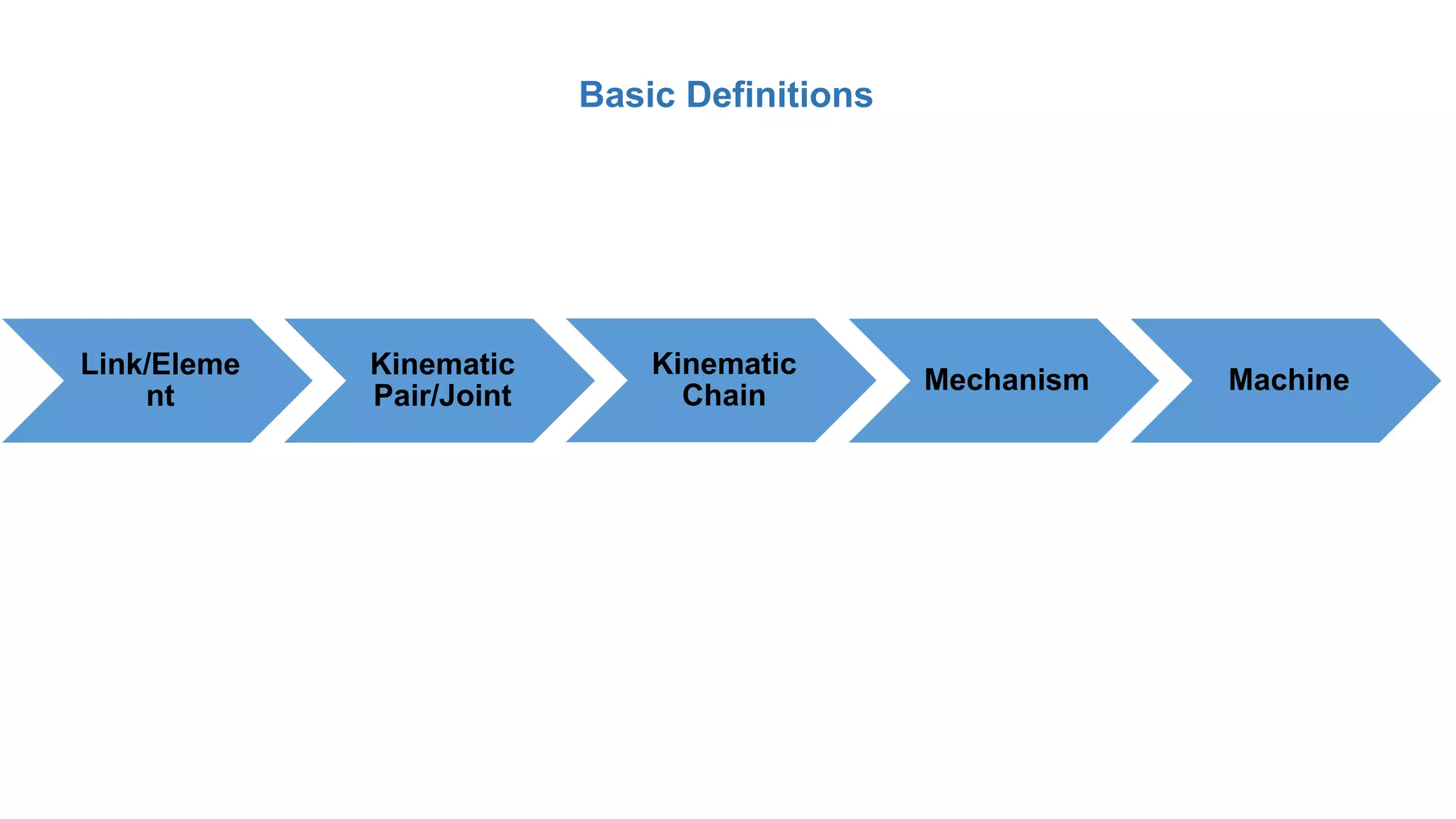
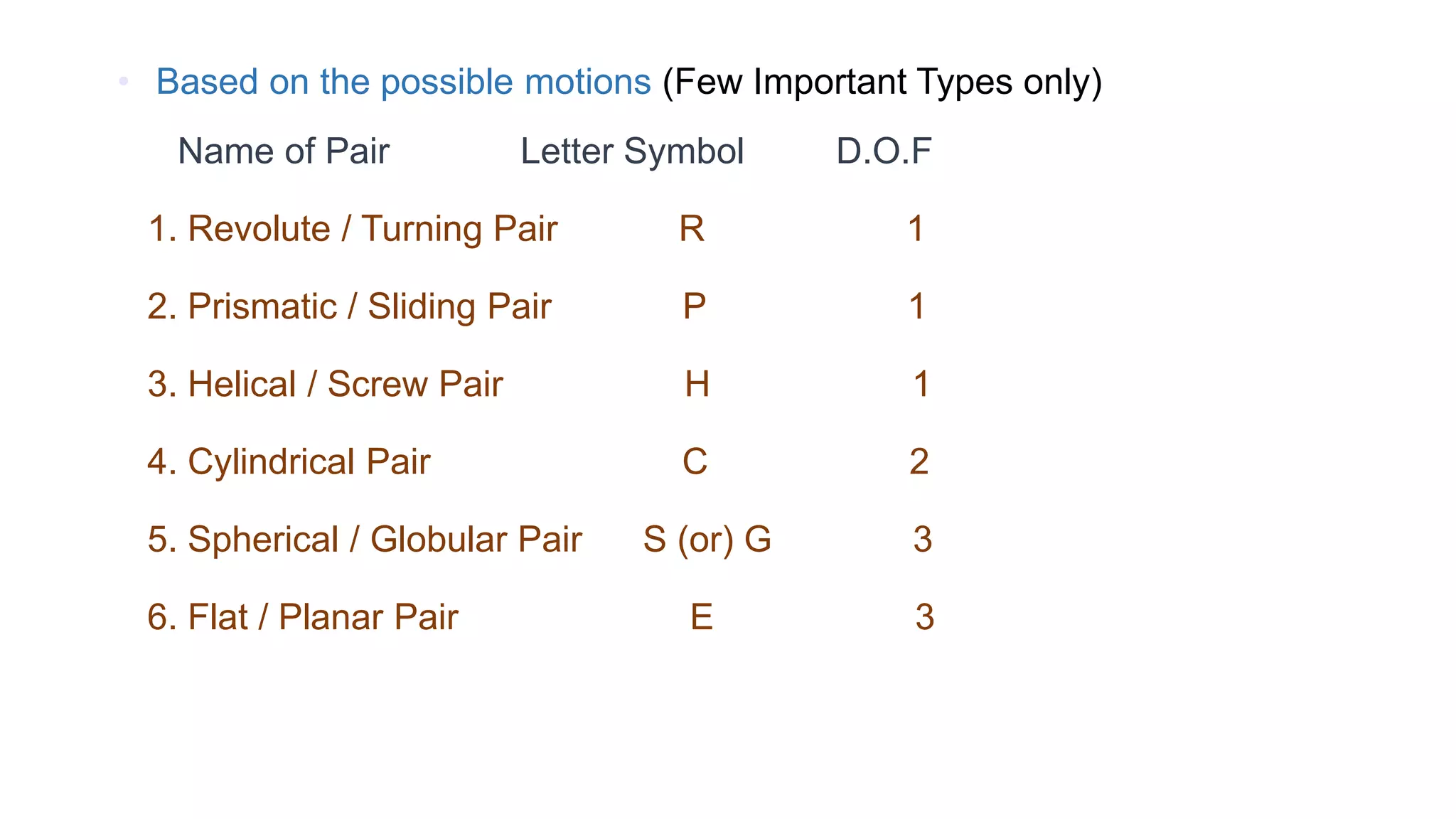
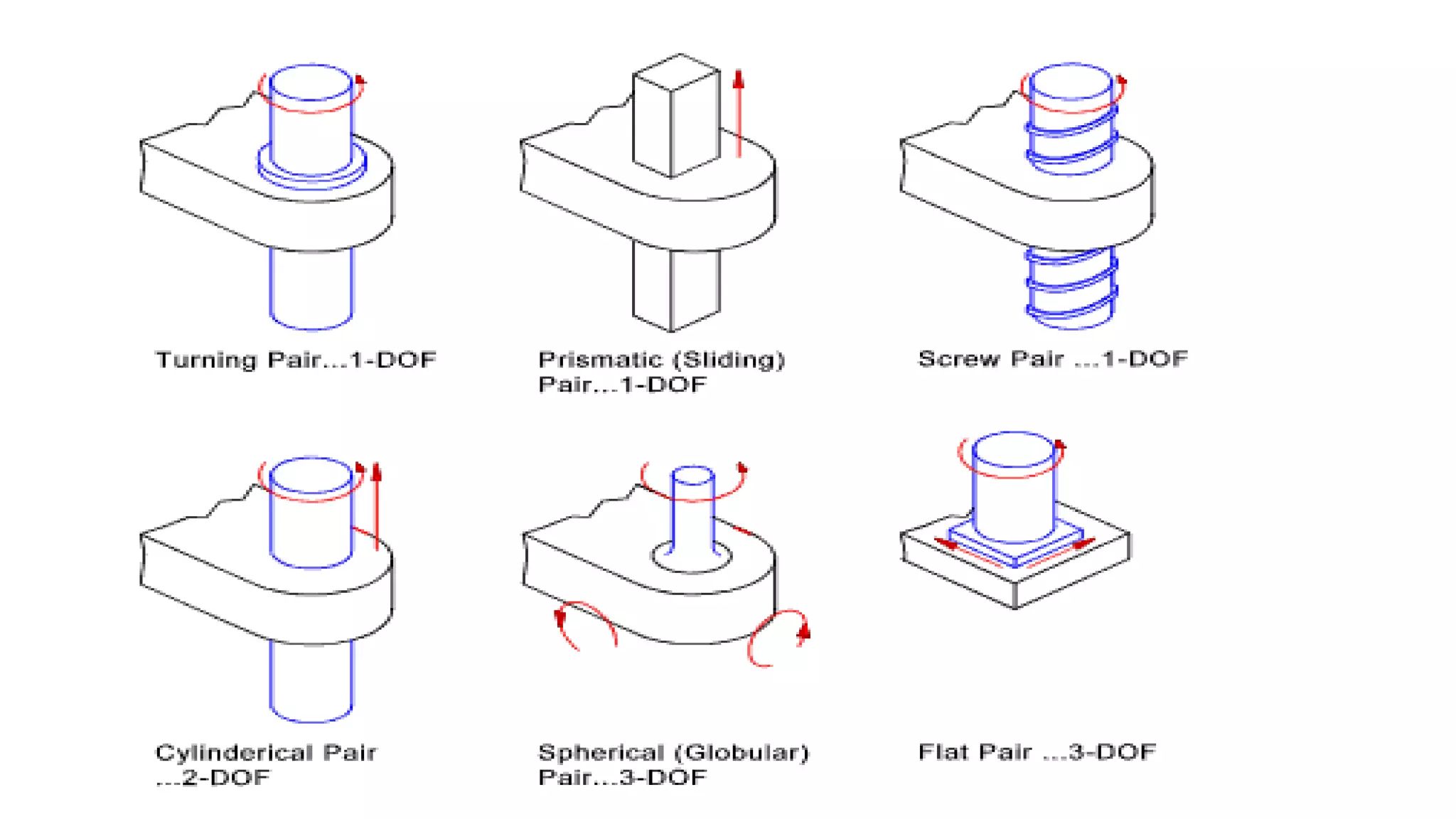
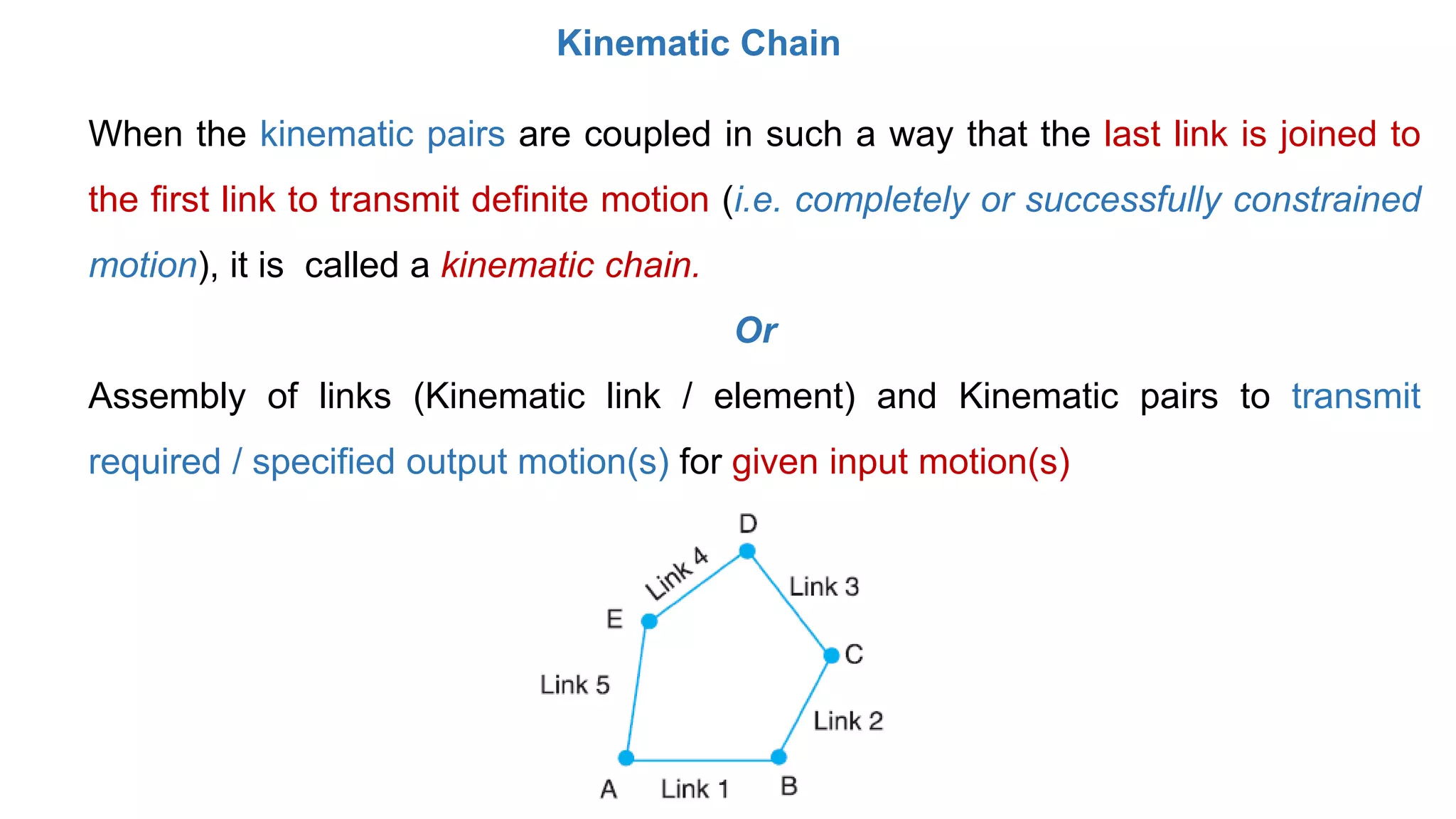
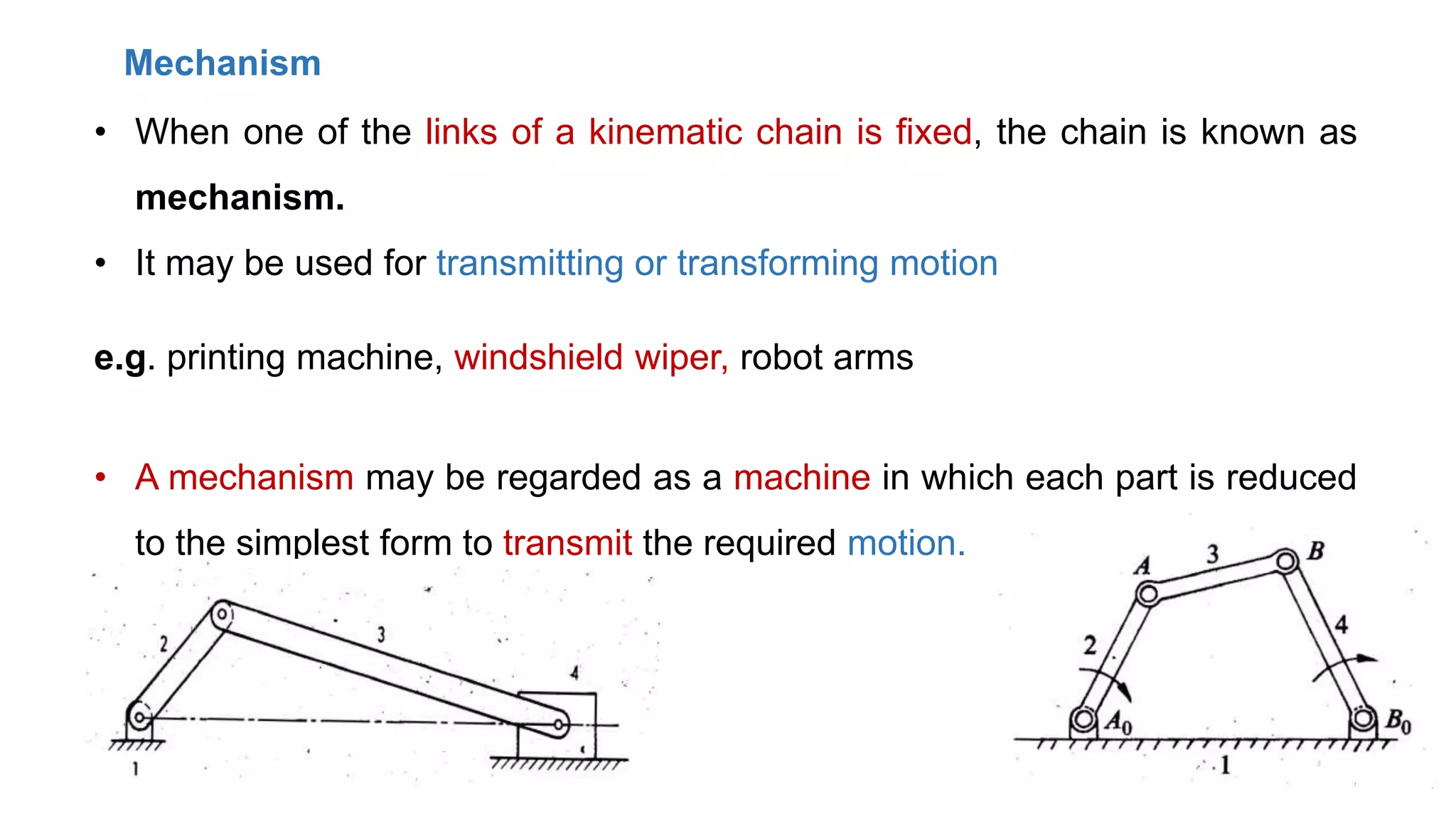
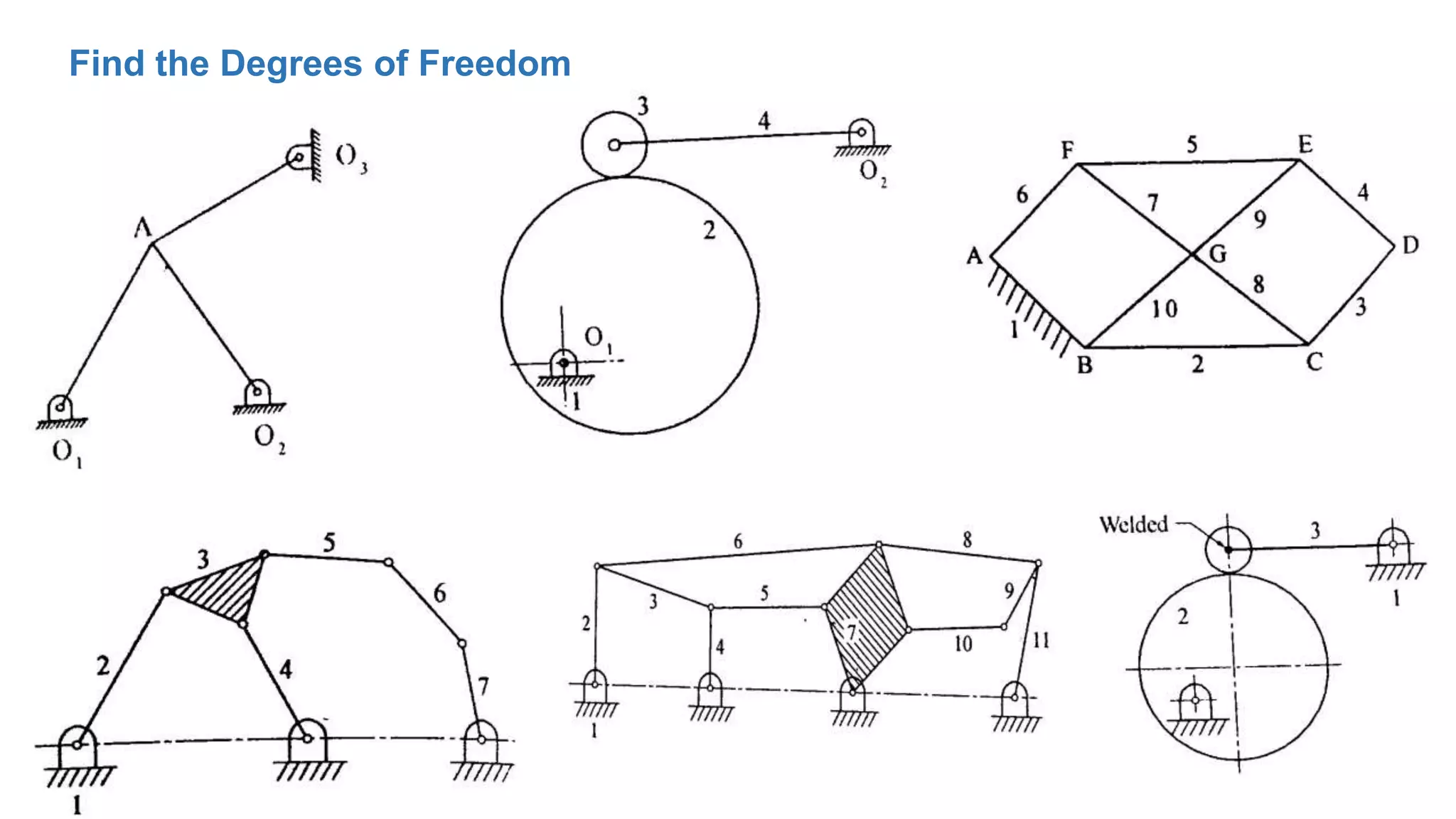
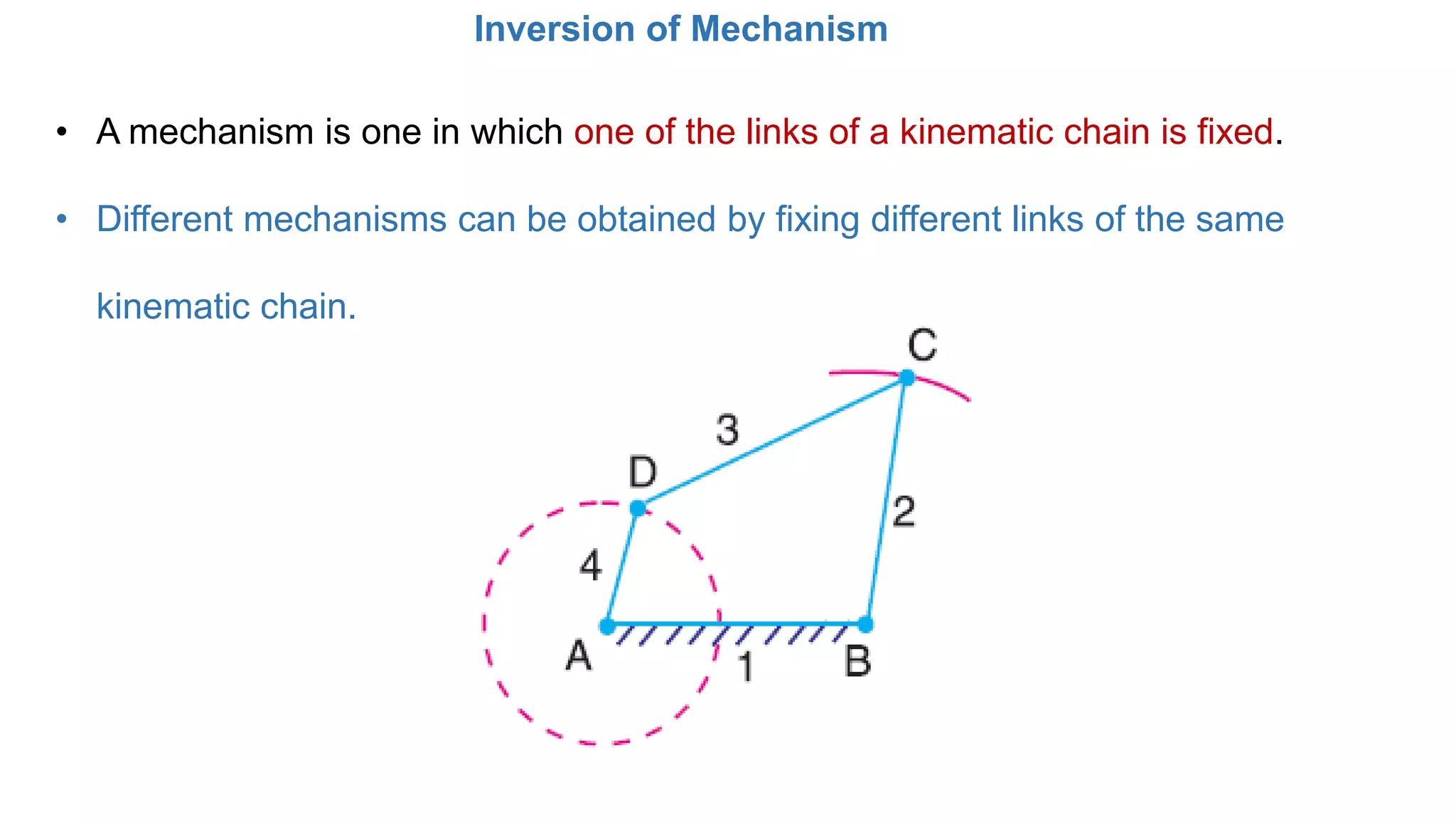
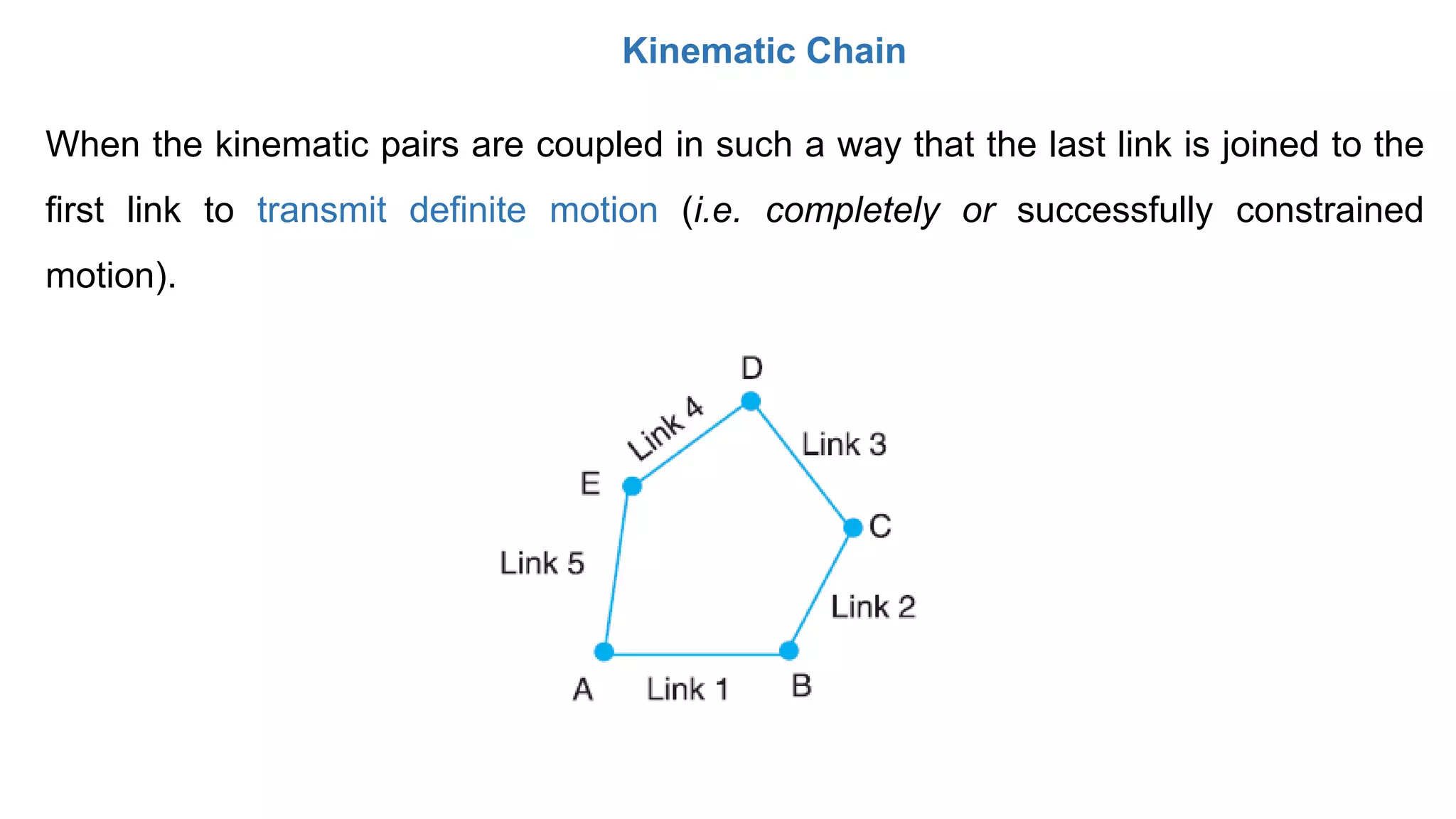


This document provides information about the Kinematics of Machines course offered by the Department of Mechanical Engineering at JSS Academy of Technical Education in Bangalore, India. It lists the course code, textbooks, reference books, course outcomes, and chapter topics that will be covered. The topics include basic definitions related to kinematic elements, pairs, chains, and mechanisms. It describes types of kinematic pairs and chains, including four-bar chains, single slider-crank chains, and double slider-crank chains. It also covers degrees of freedom, Grubler's criterion, and inversions of mechanisms.






















































































