



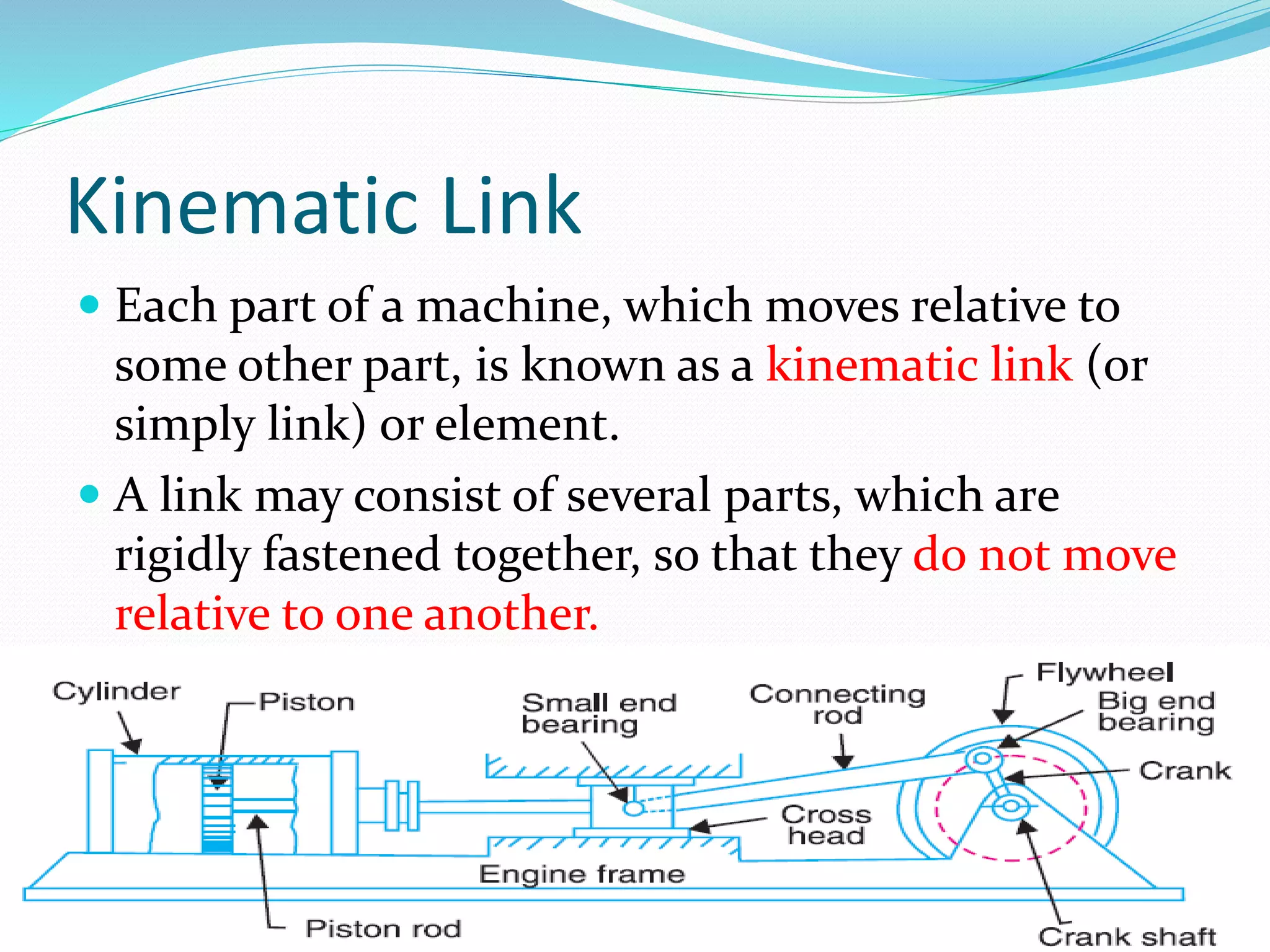











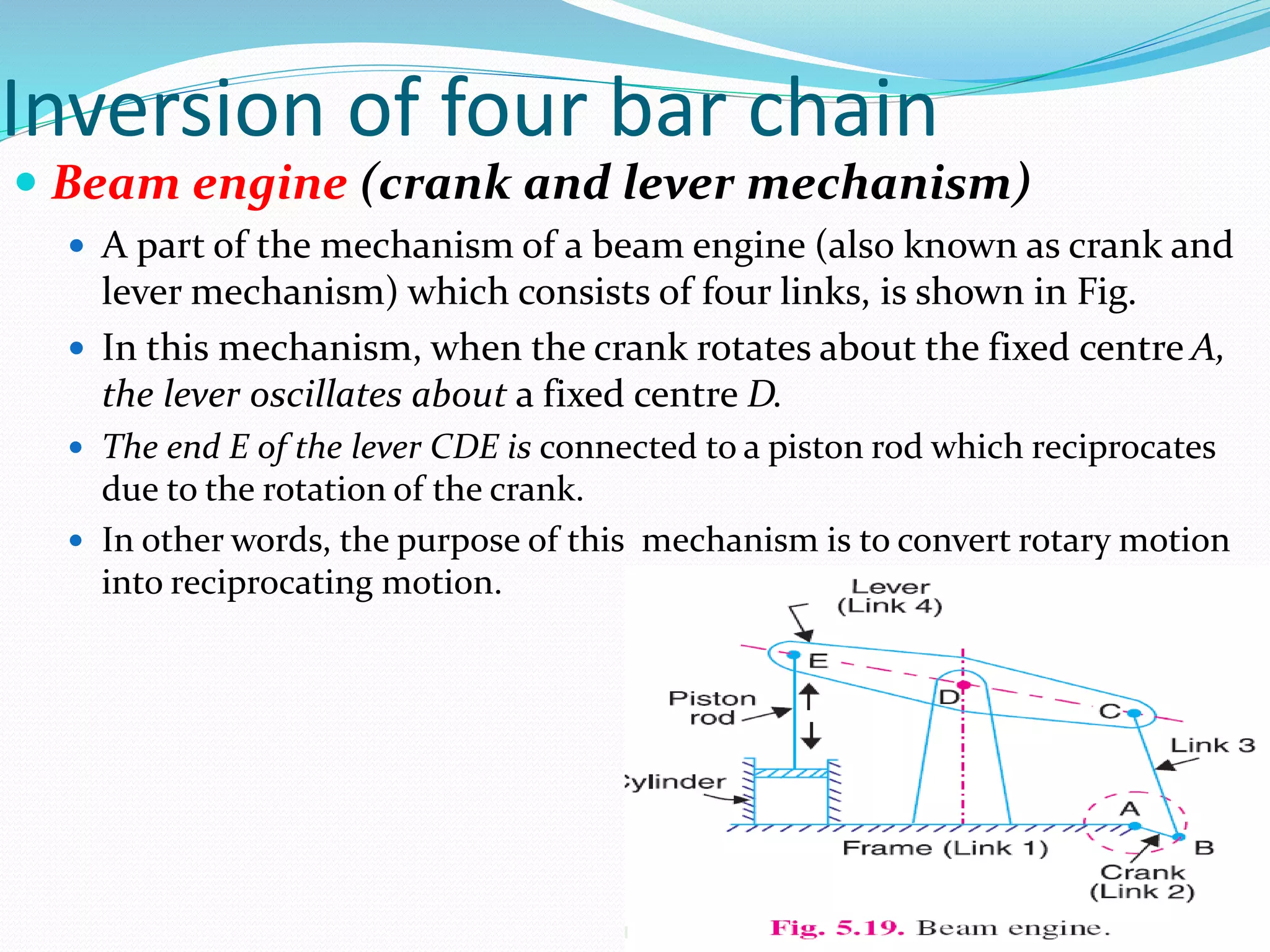






The document provides an introduction to the kinematics of mechanisms and machines, emphasizing the distinction between kinematics (motion without force consideration) and dynamics (motion with force effects). It classifies mechanisms into planar and spatial types, discusses various types of links (rigid, flexible, fluid), and explains concepts of kinematic pairs and chains, including degrees of freedom and various examples of mechanisms. It also outlines the inversion of mechanisms, demonstrating how different fixed links can yield different configurations within a kinematic chain.



































































