Downloaded 25 times


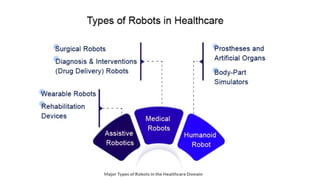







The document outlines the curriculum and objectives of a medical robotics course offered at JSS Academy of Technical Education, focusing on the application of robotics in healthcare, including surgical and rehabilitation robots. It details course outcomes, evaluation methods, and types of medical robots, emphasizing the use of advanced robotics technologies for minimally invasive surgeries and rehabilitation. Key topics include sensor navigation, robotic surgery systems, and the future potential of medical robotics in various healthcare applications.