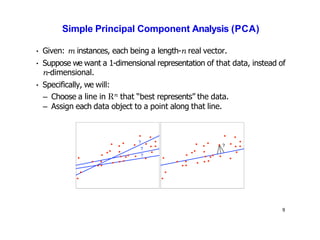
- Dimensionality reduction techniques assign instances to vectors in a lower-dimensional space while approximately preserving similarity relationships. Principal component analysis (PCA) is a common linear dimensionality reduction technique.
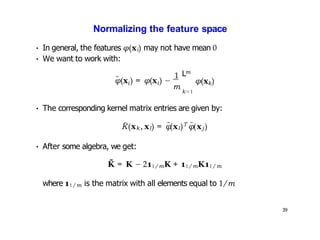
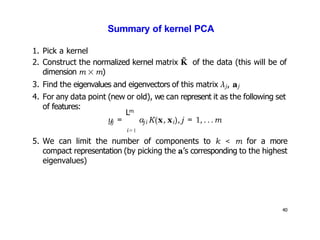
- Kernel PCA performs PCA in a higher-dimensional feature space implicitly defined by a kernel function. This allows PCA to find nonlinear structure in data. Kernel PCA computes the principal components by finding the eigenvectors of the normalized kernel matrix.
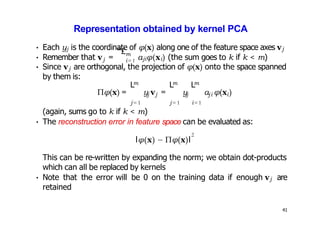
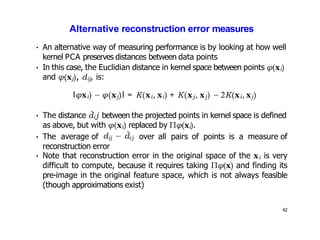
- For a new data point, its representation in the lower-dimensional space is given by projecting it onto the principal components in feature space using the kernel trick, without explicitly computing features.






![PCA vs Locally Linear Embedding
[Saul, L. K., & Roweis, S. T. (2000).
embedding.]
50
An introduction to locally linear](https://image.slidesharecdn.com/ml-lecture13-230811135539-eb87decd/85/machine-learning-pptx-50-320.jpg)