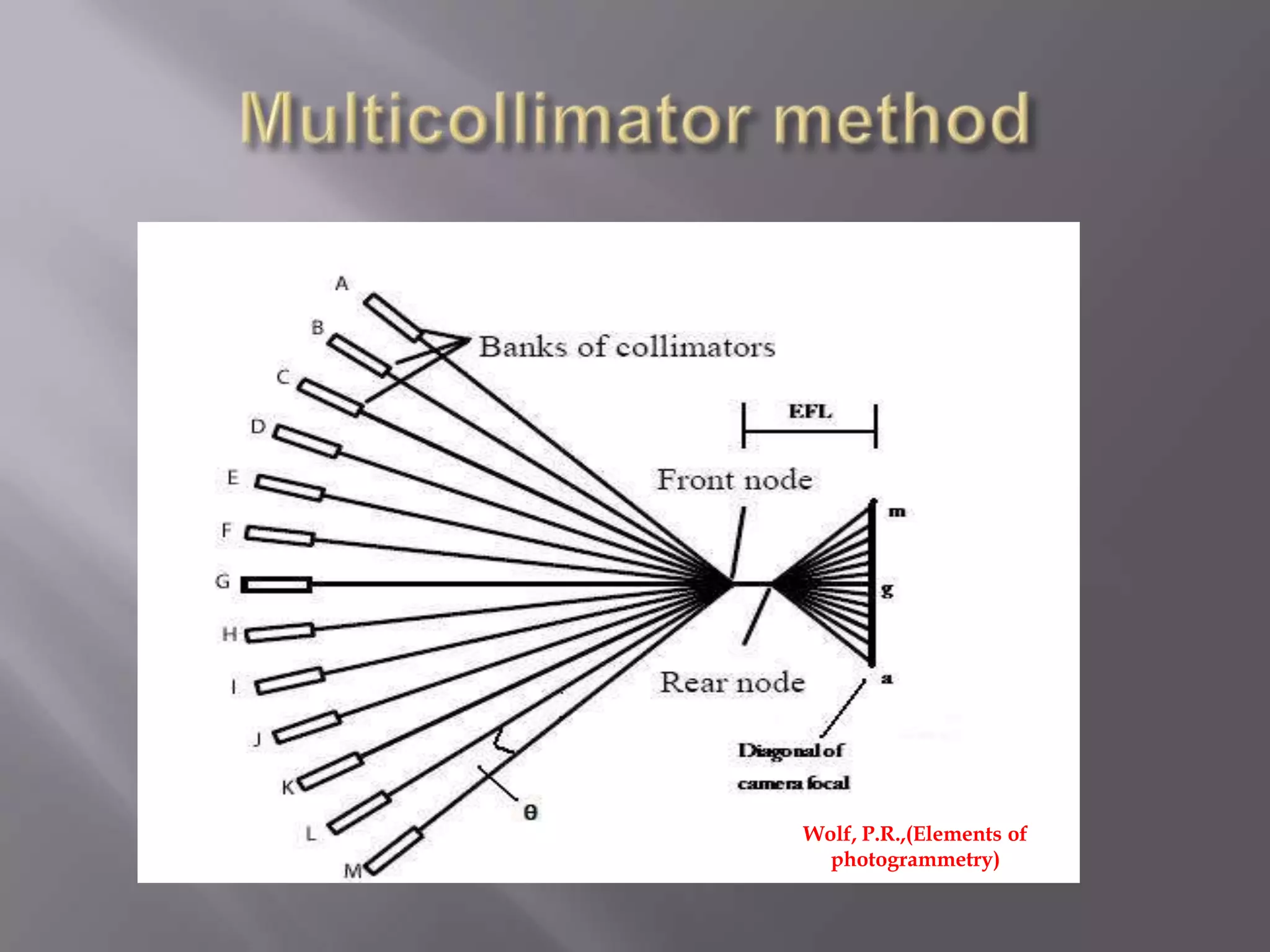
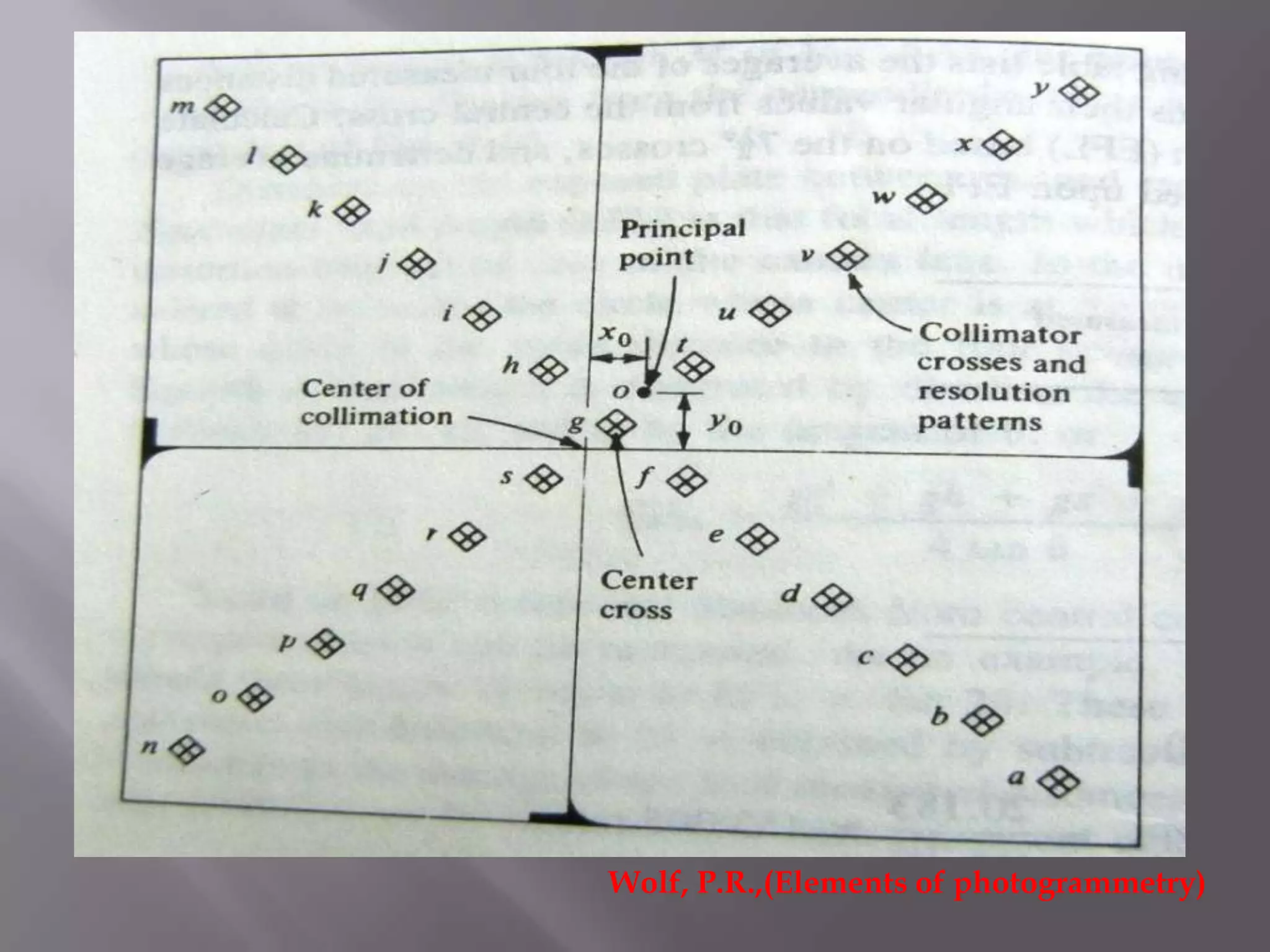
The document discusses camera calibration. It describes determining the internal optical parameters (IOP) of cameras like focal length and principal point coordinates. It discusses different distortion models like radial, decentric, and atmospheric distortions. It outlines laboratory, field, and stellar calibration methods. It explains how equivalent focal length, radial distortion, and calibrated focal length are calculated. It also mentions self-calibration, using calibration objects, and bundle adjustment methods for calibration.