Downloaded 124 times
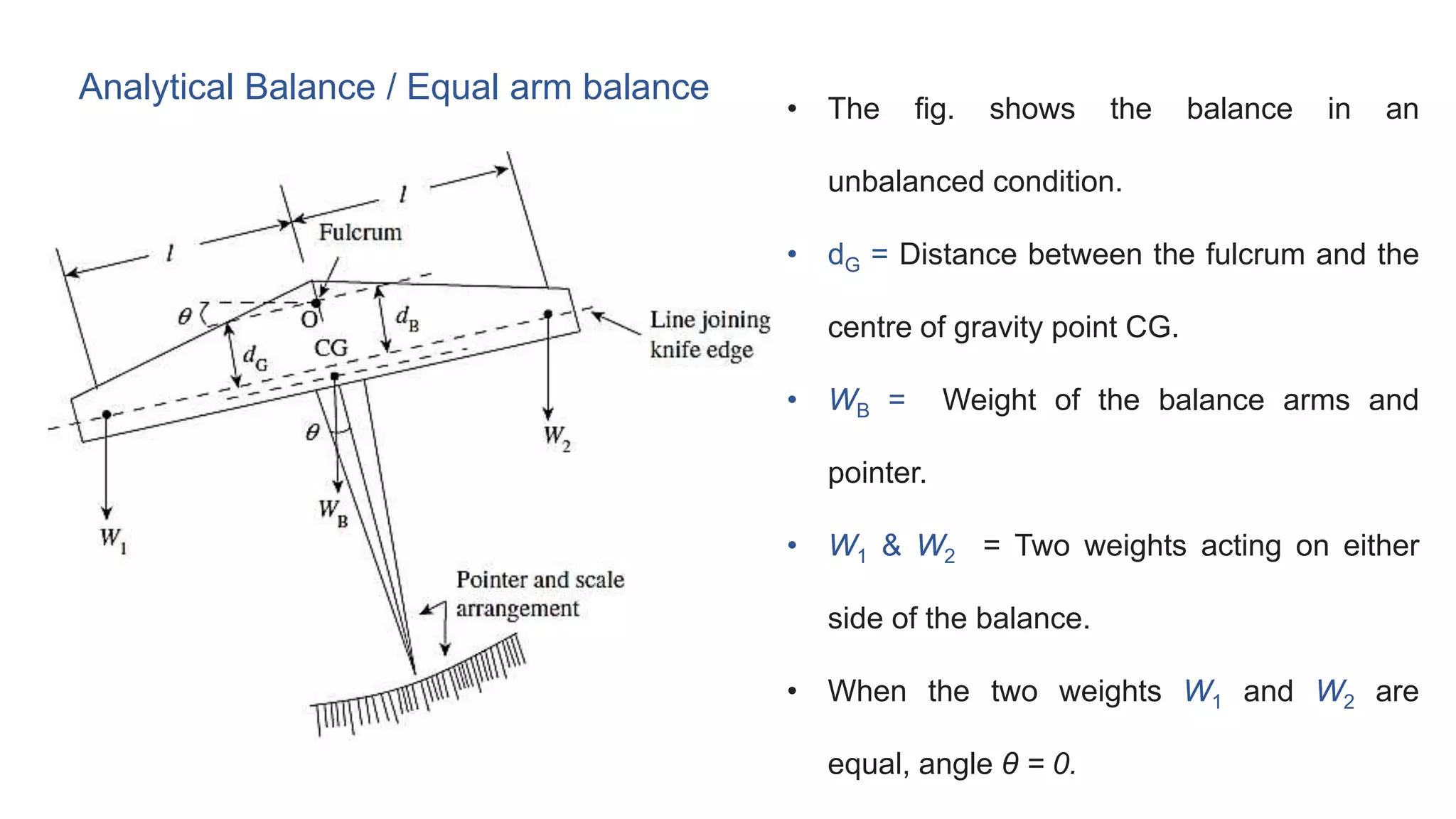



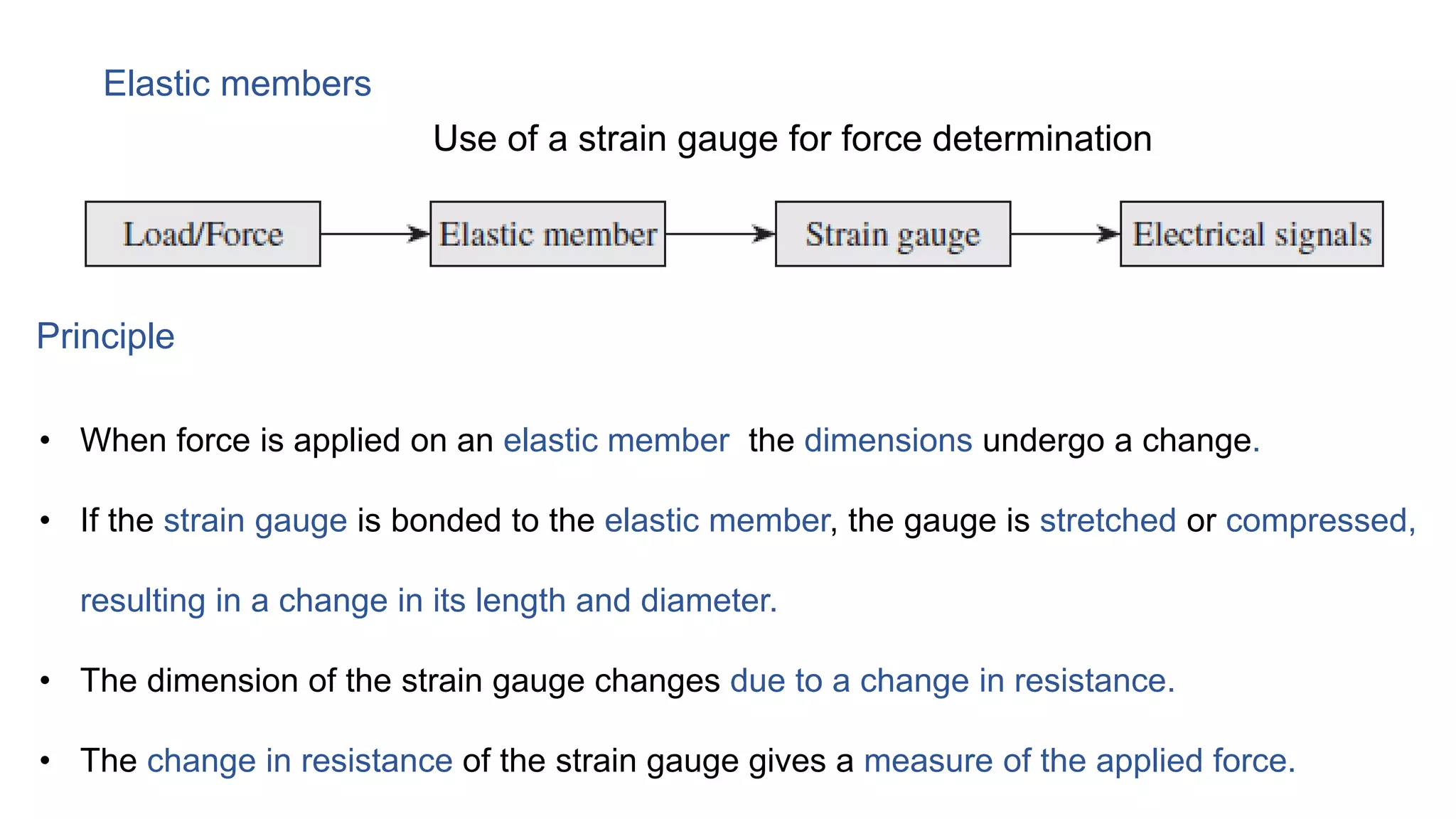
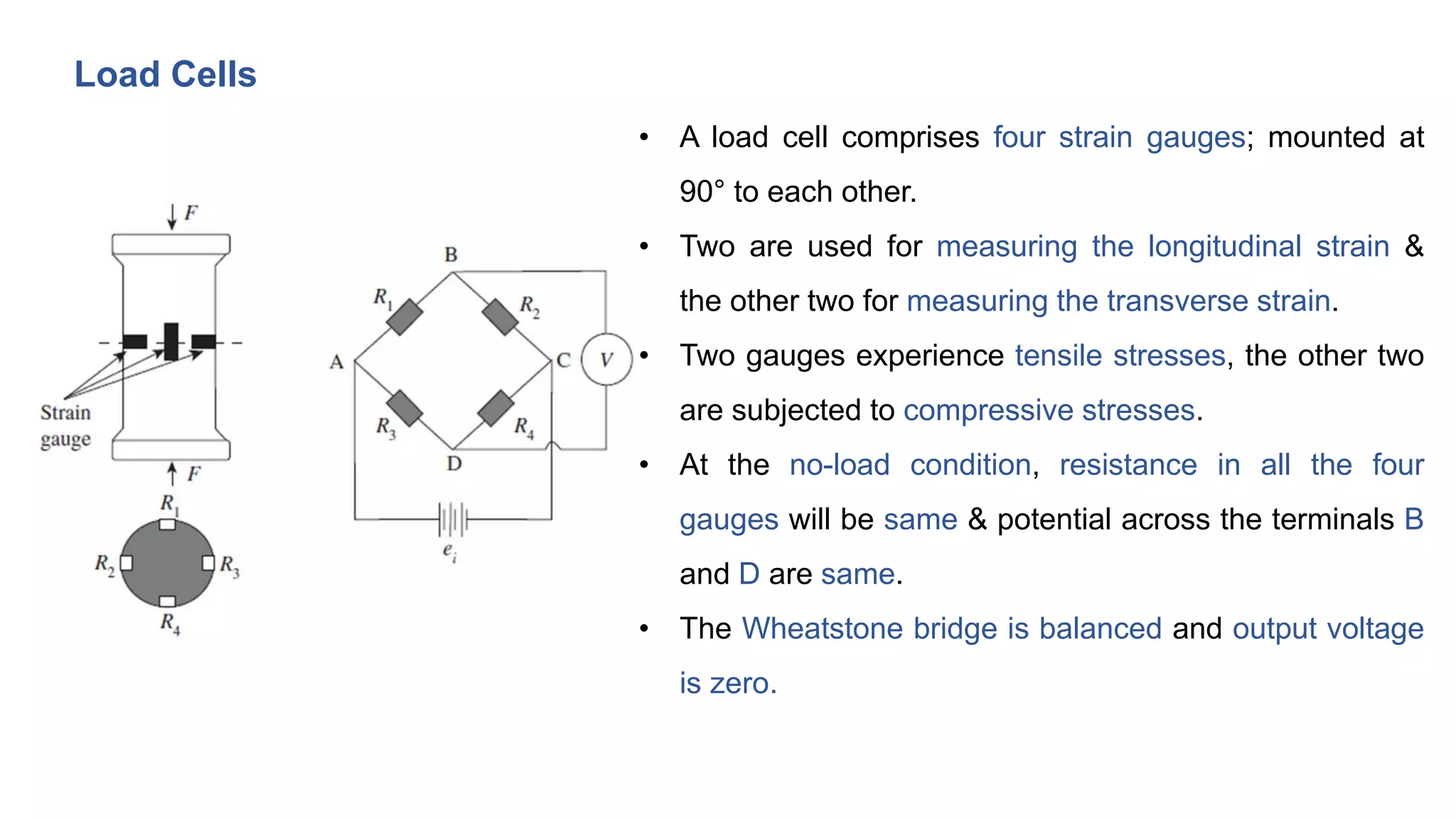
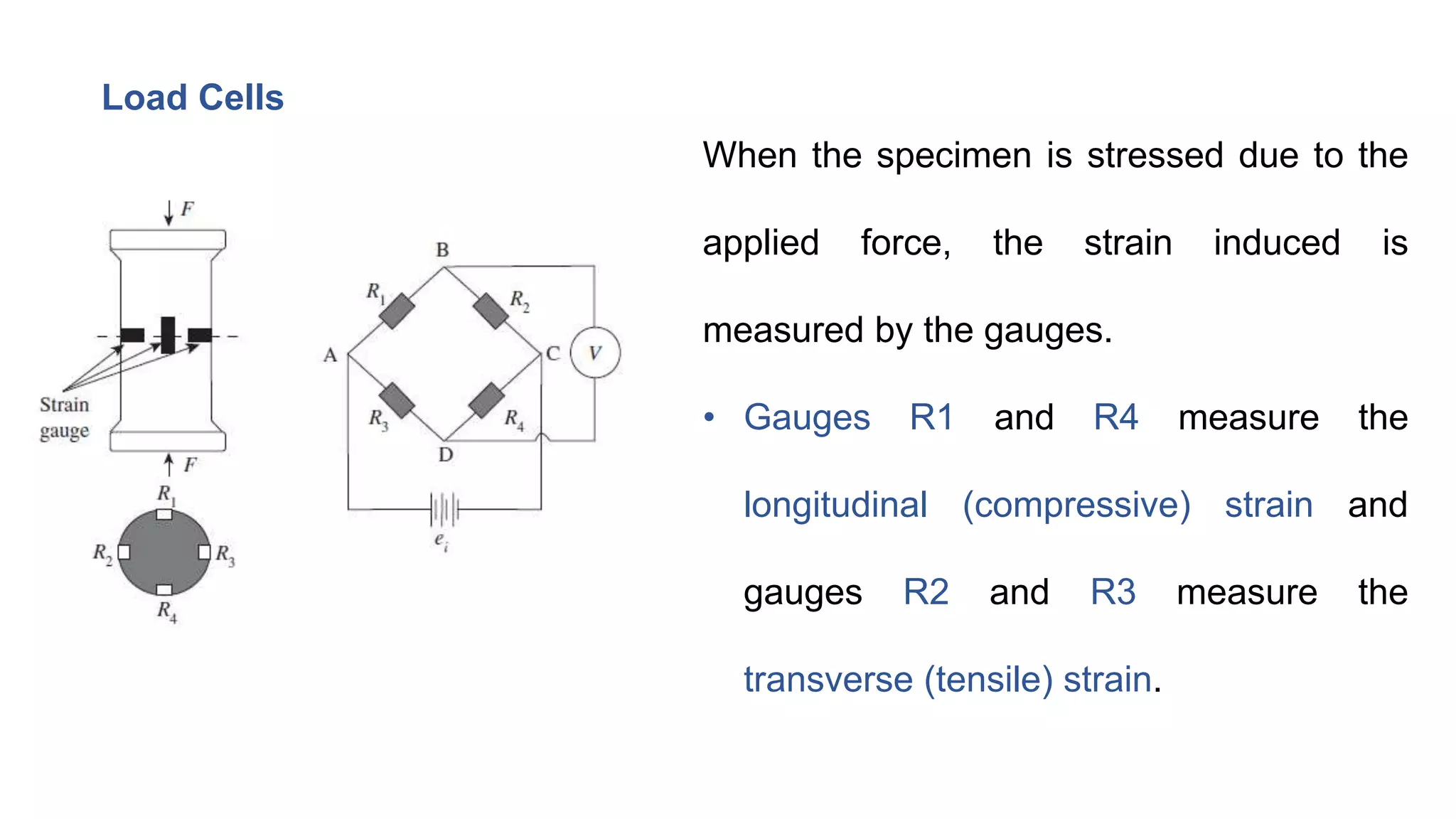
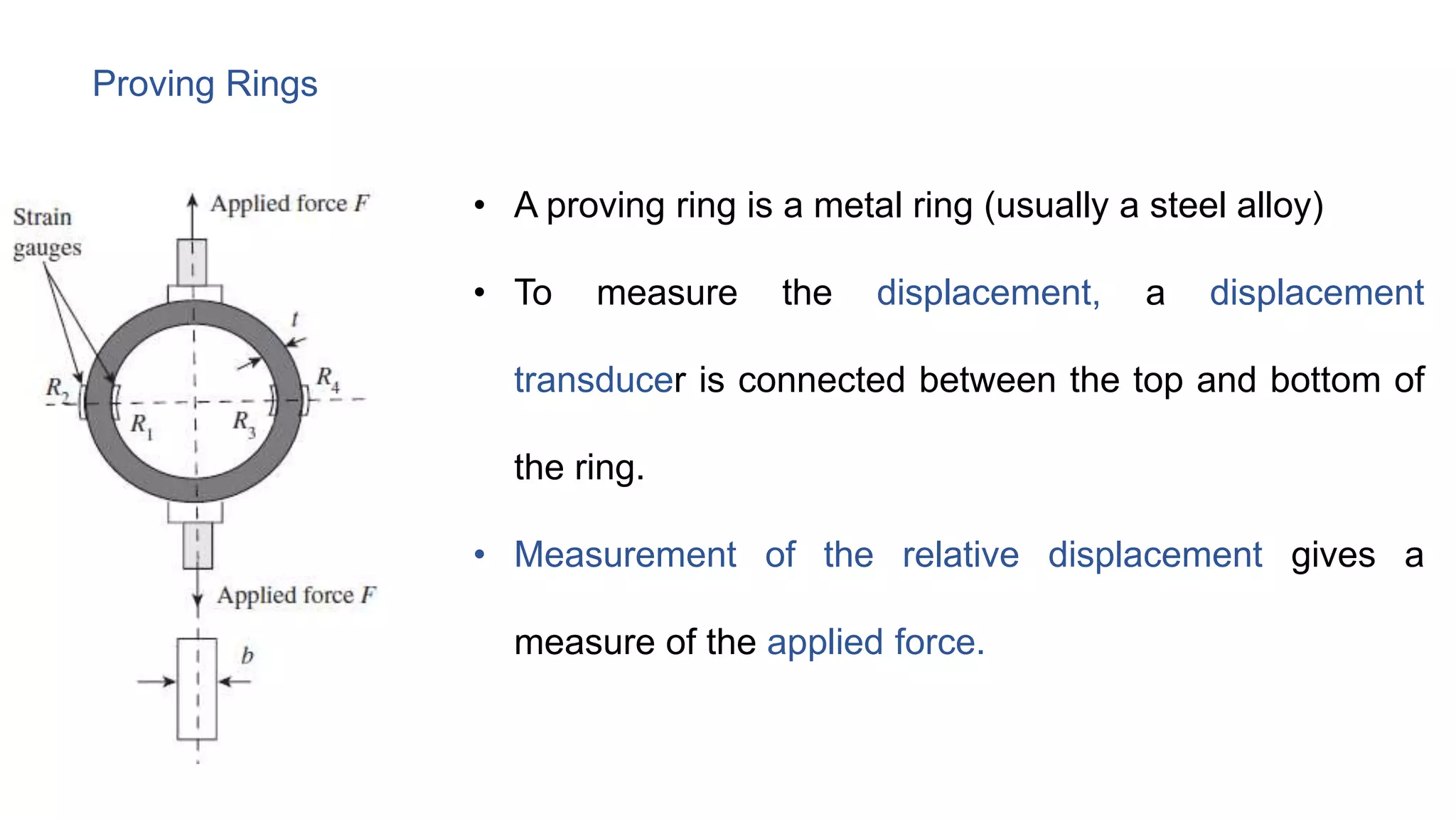
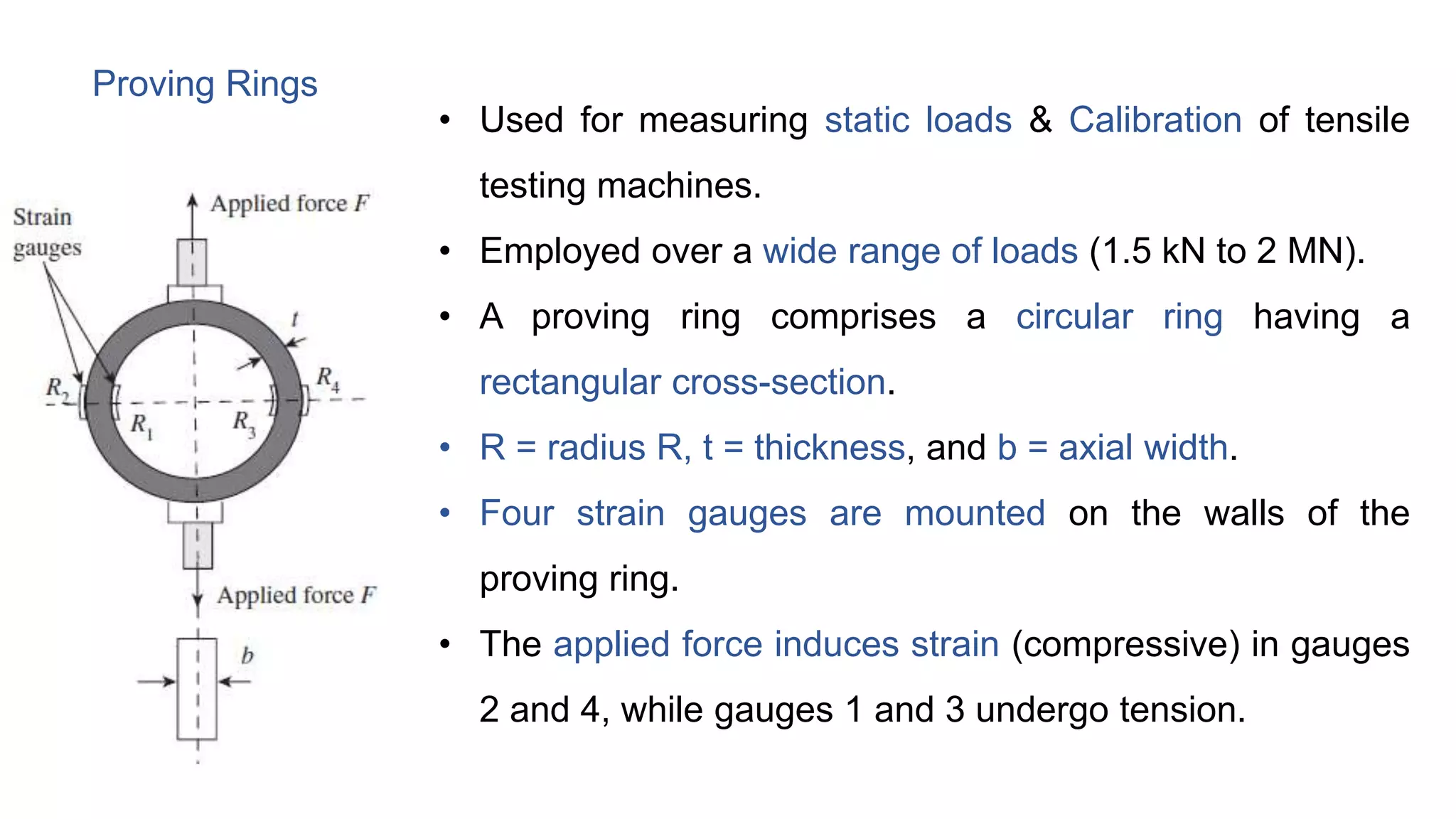
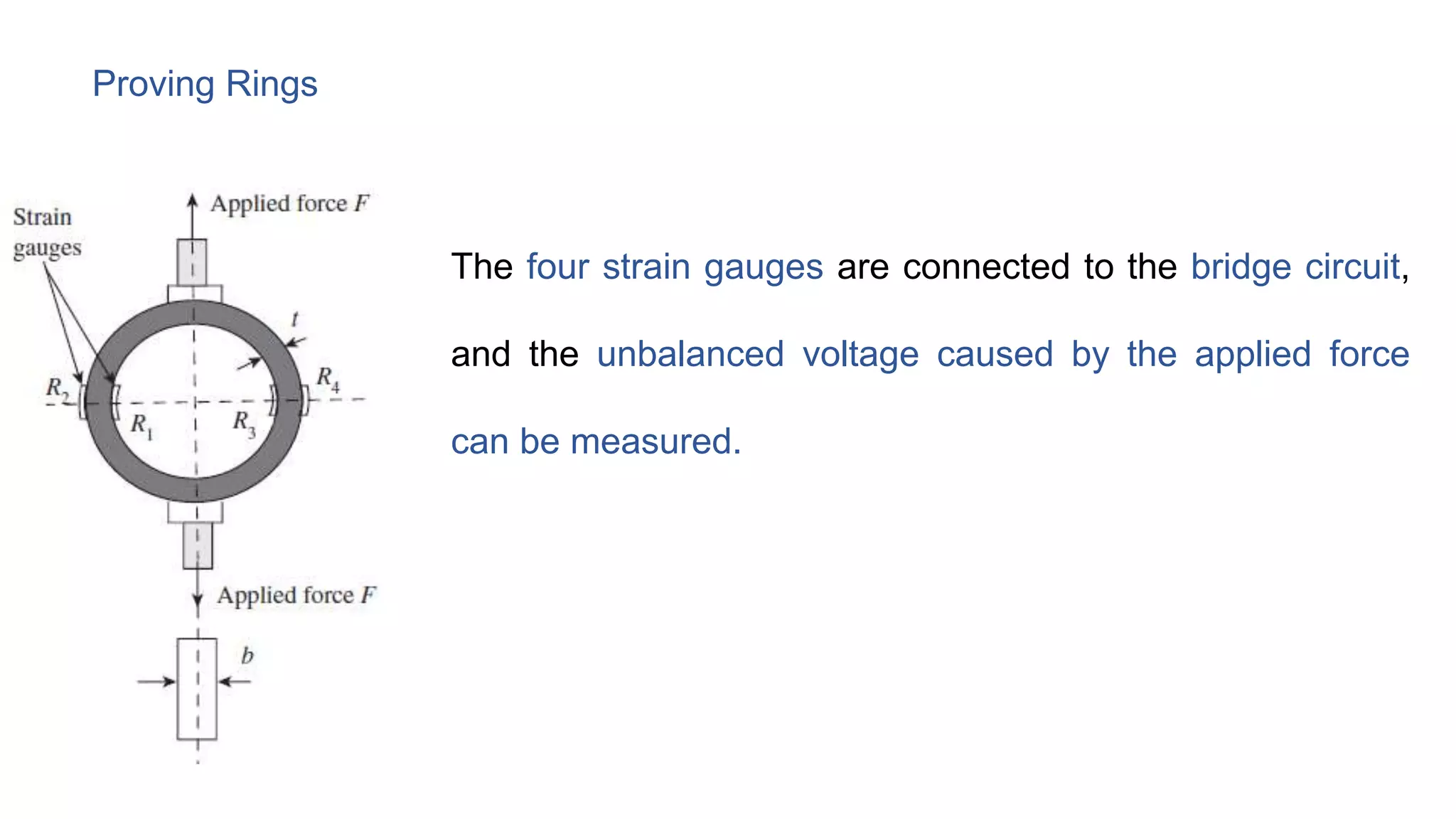
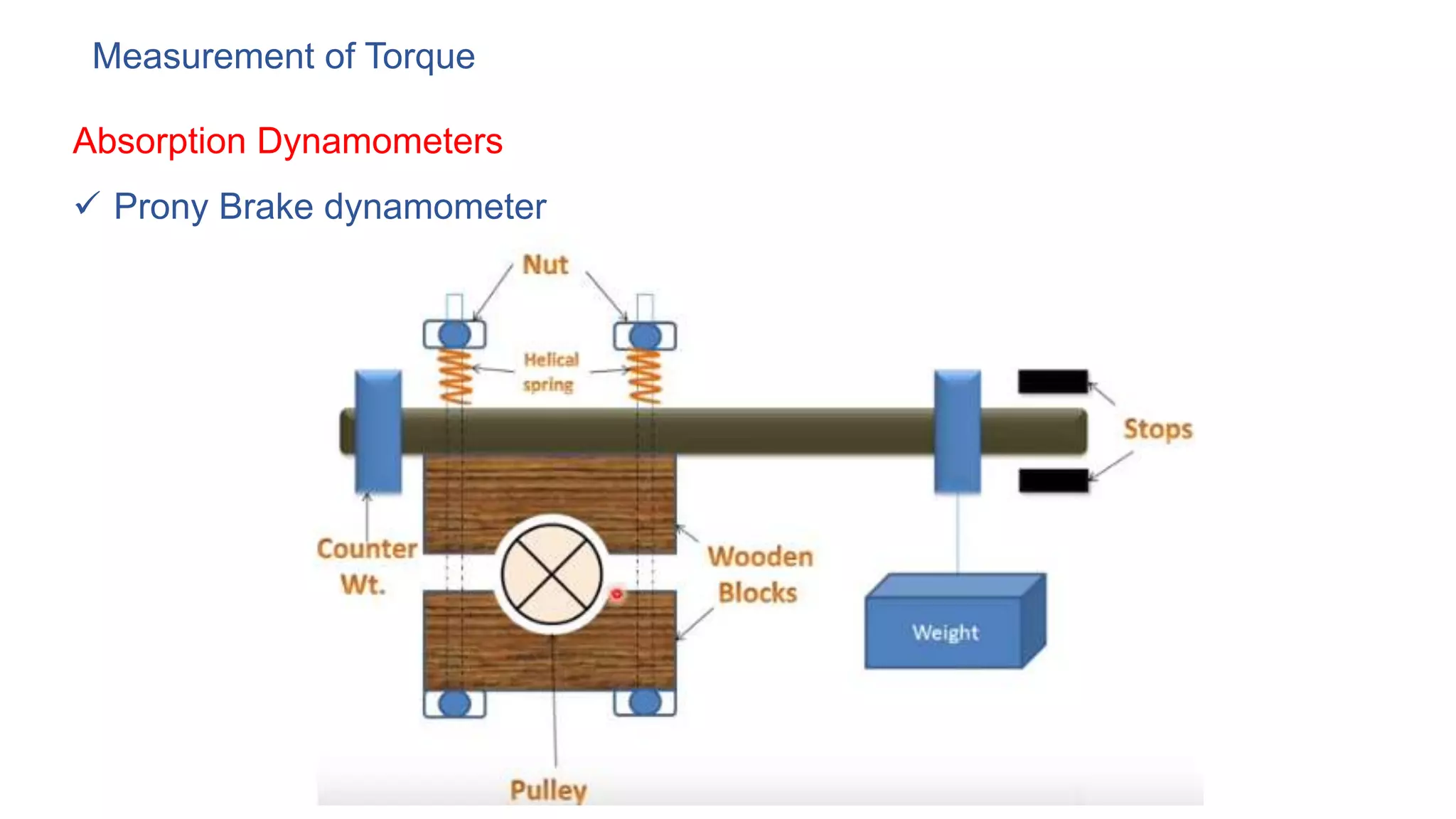
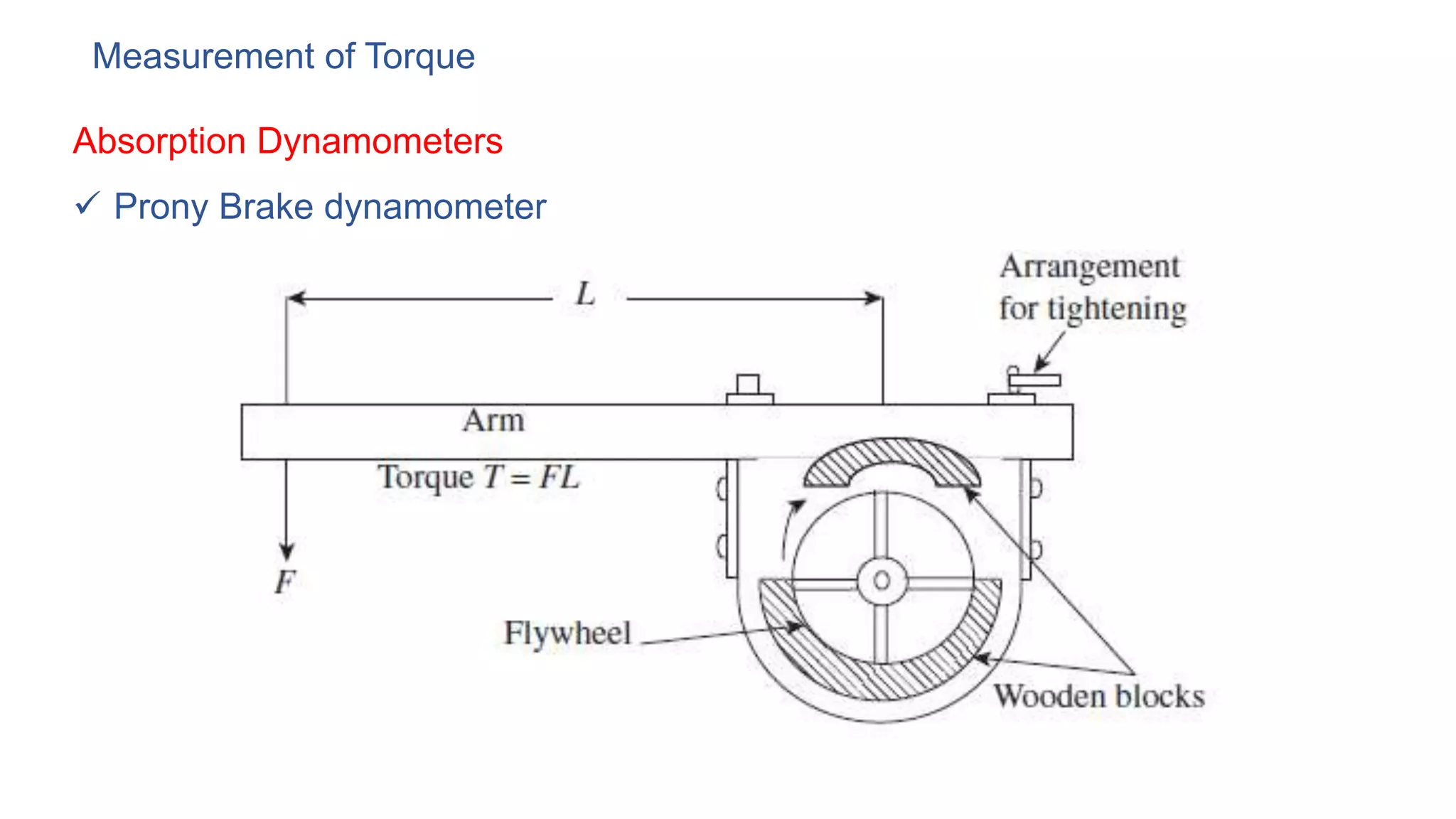
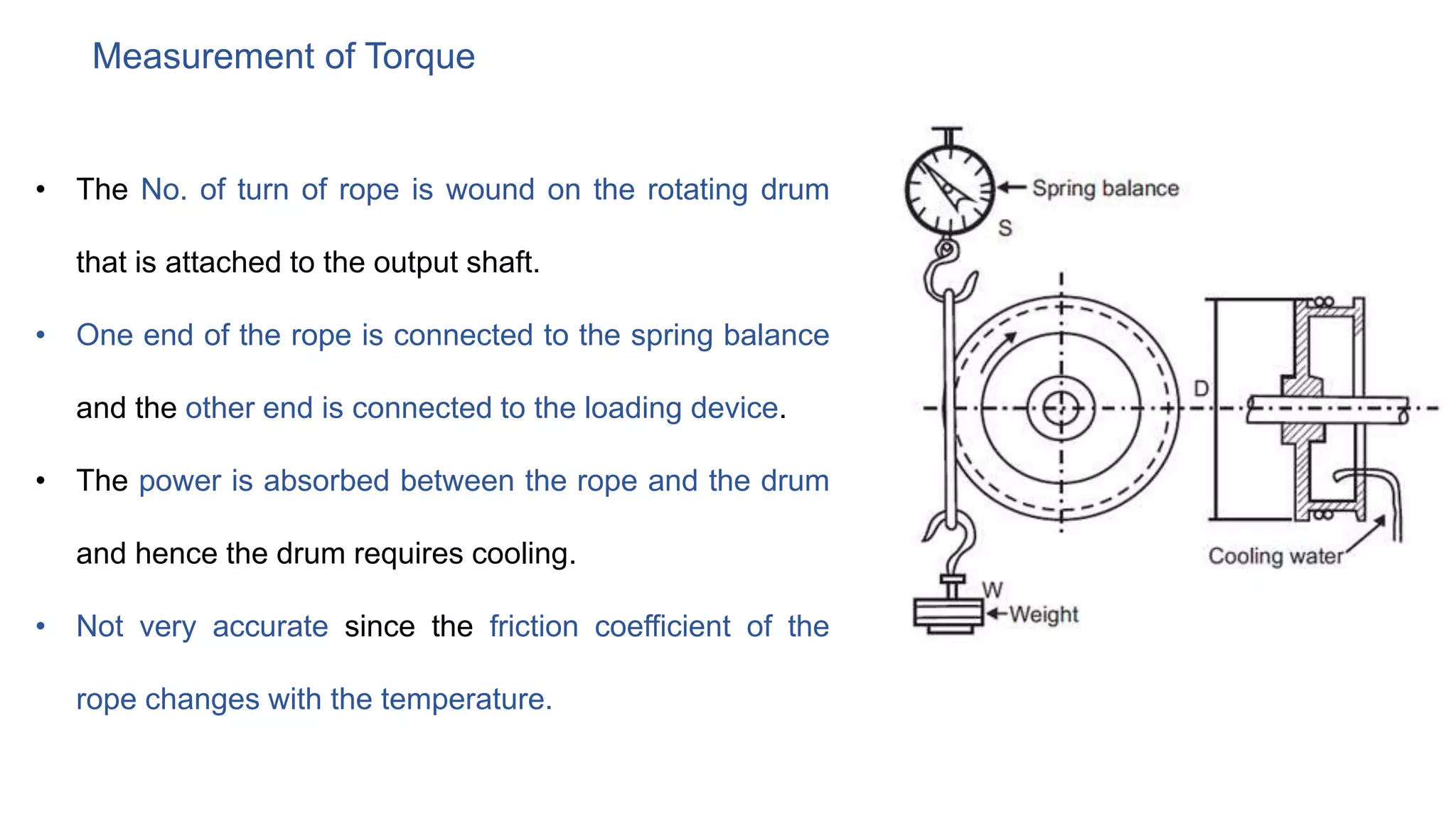
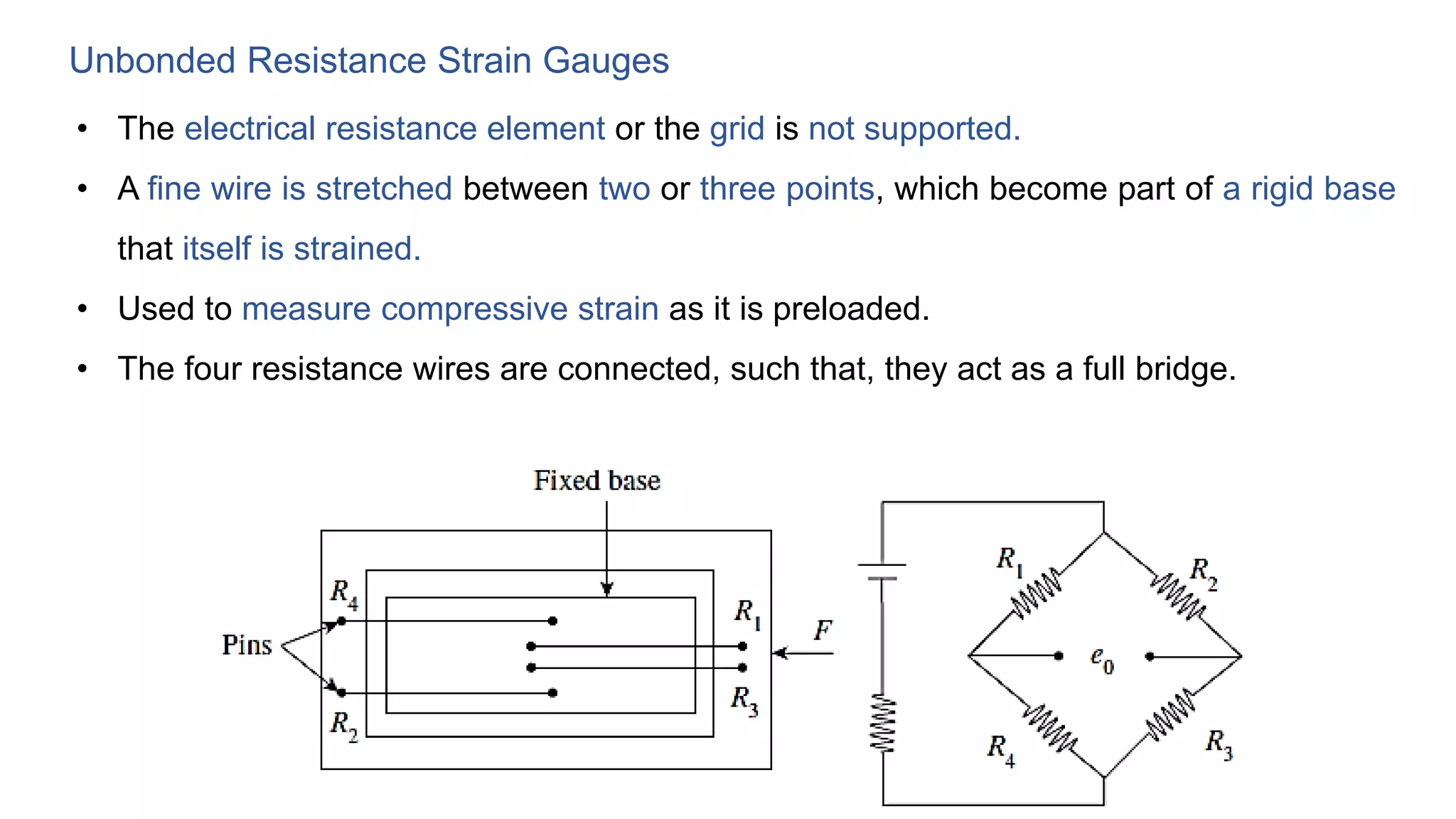
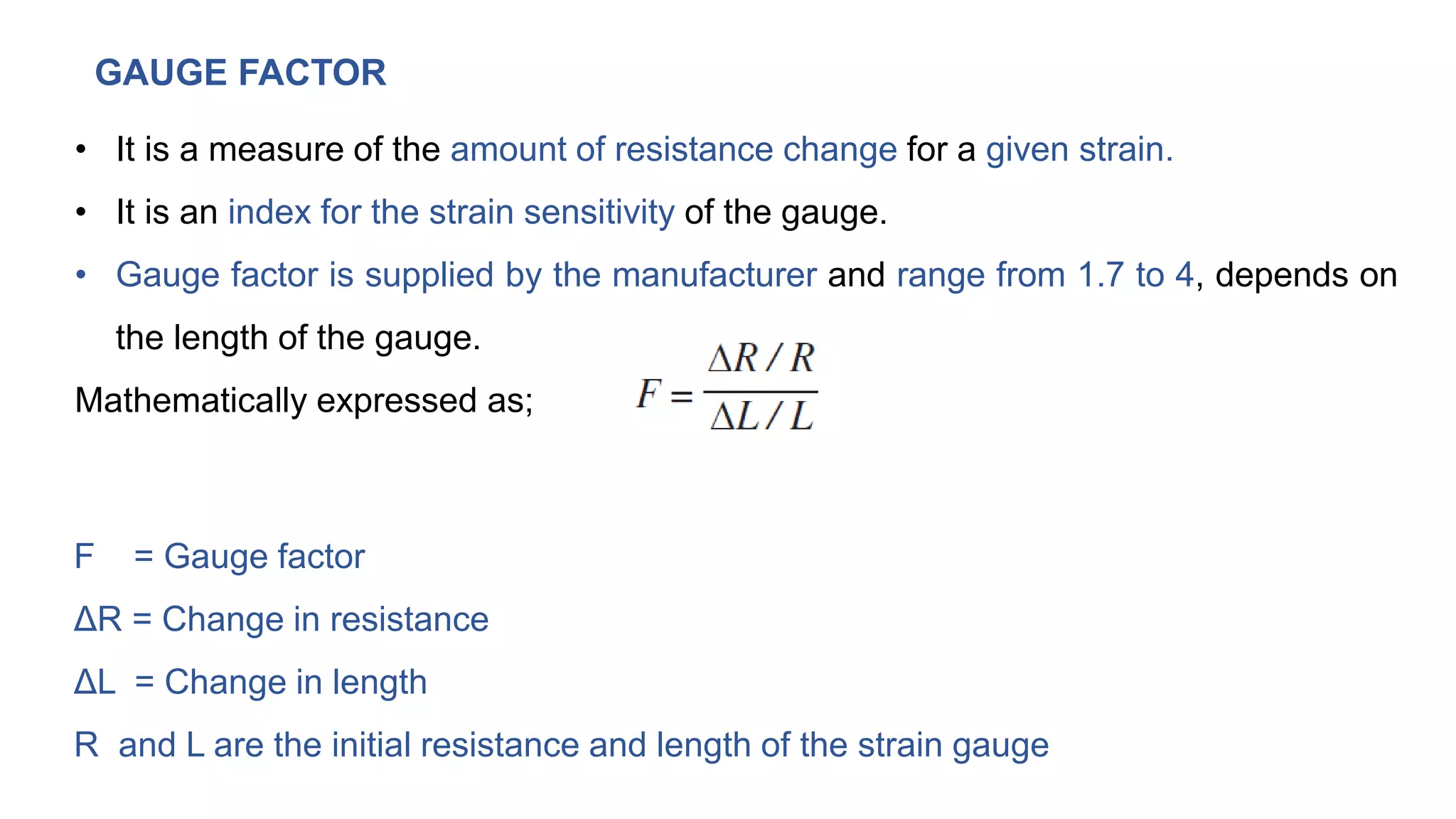
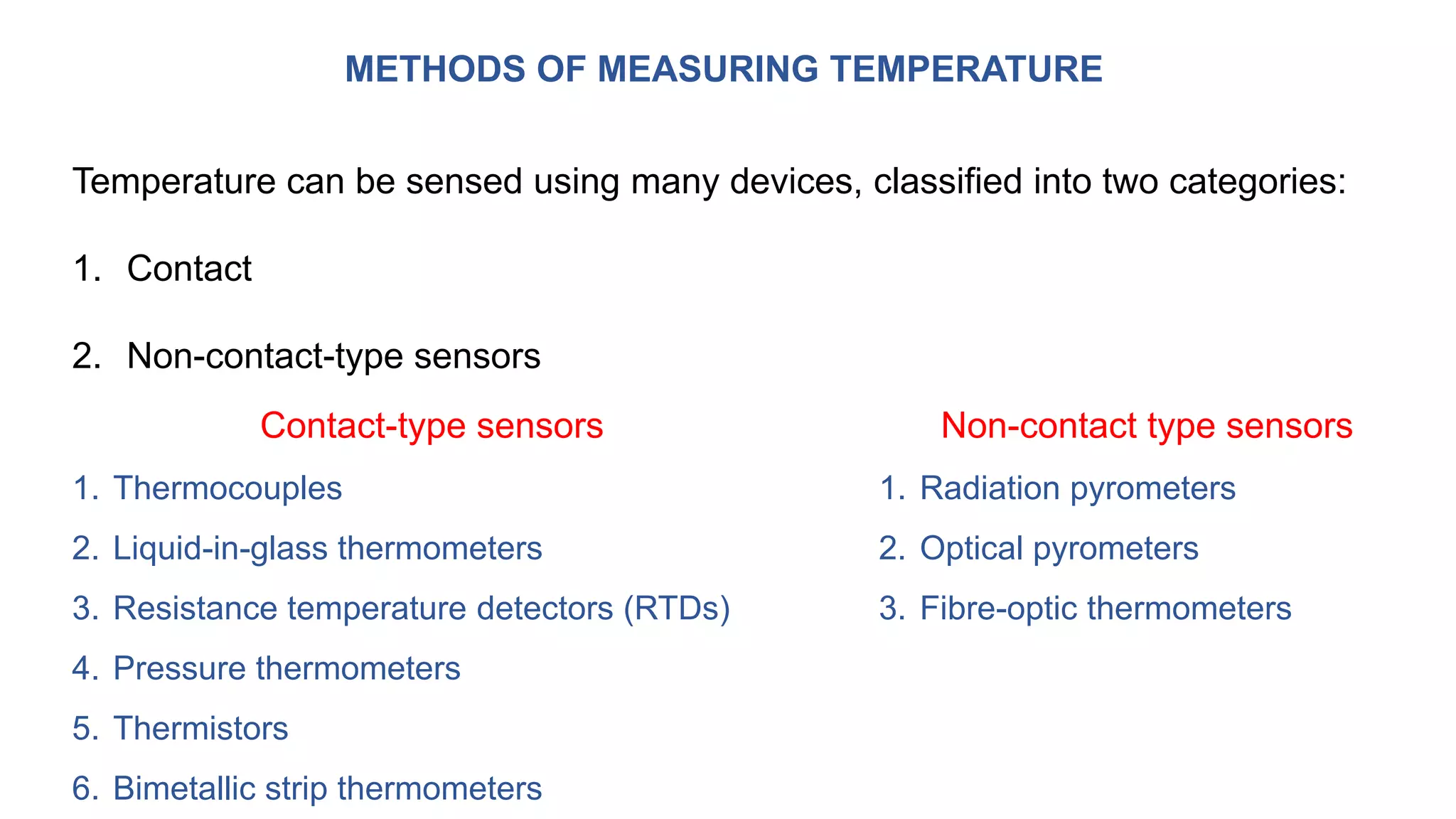
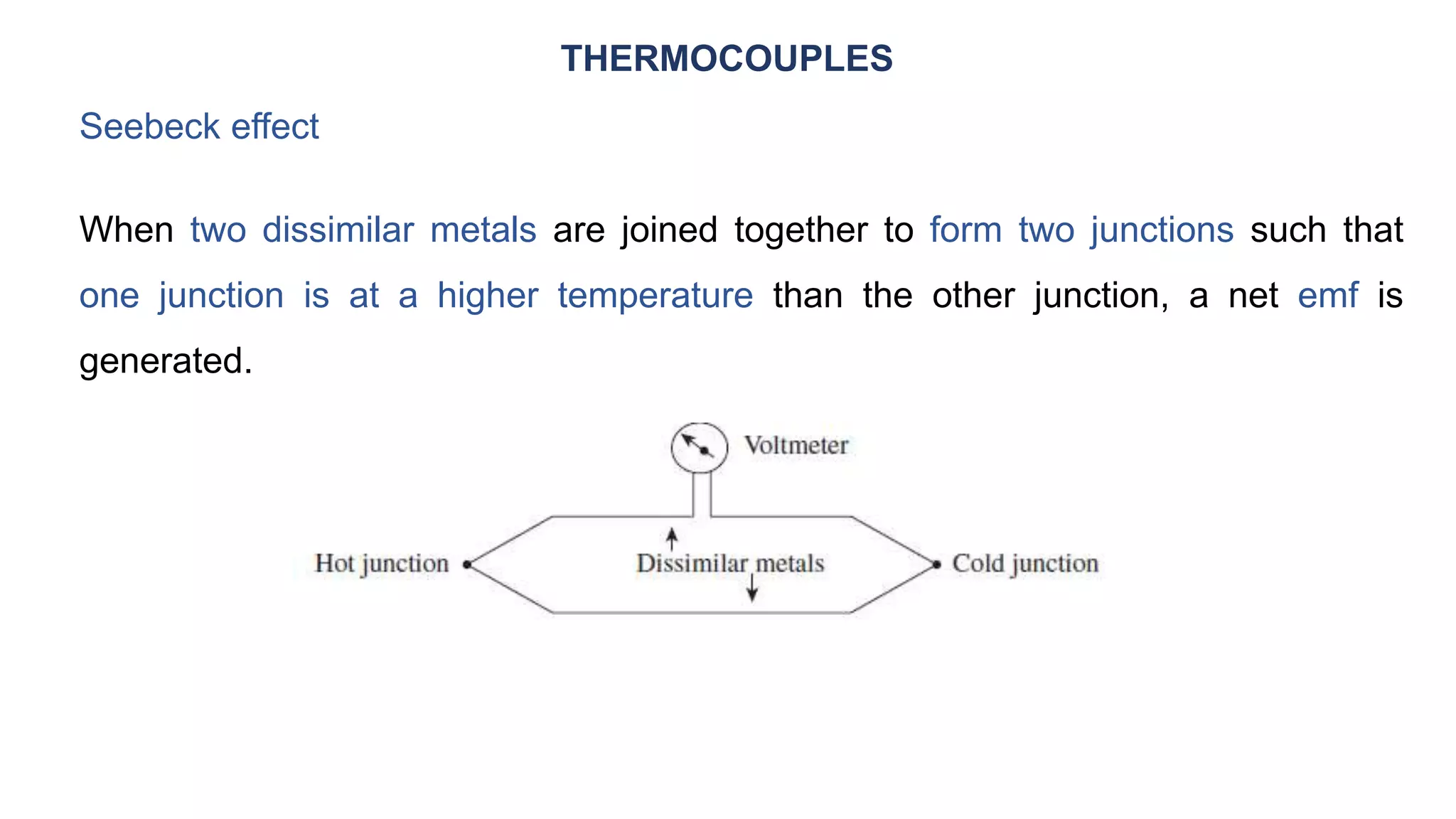
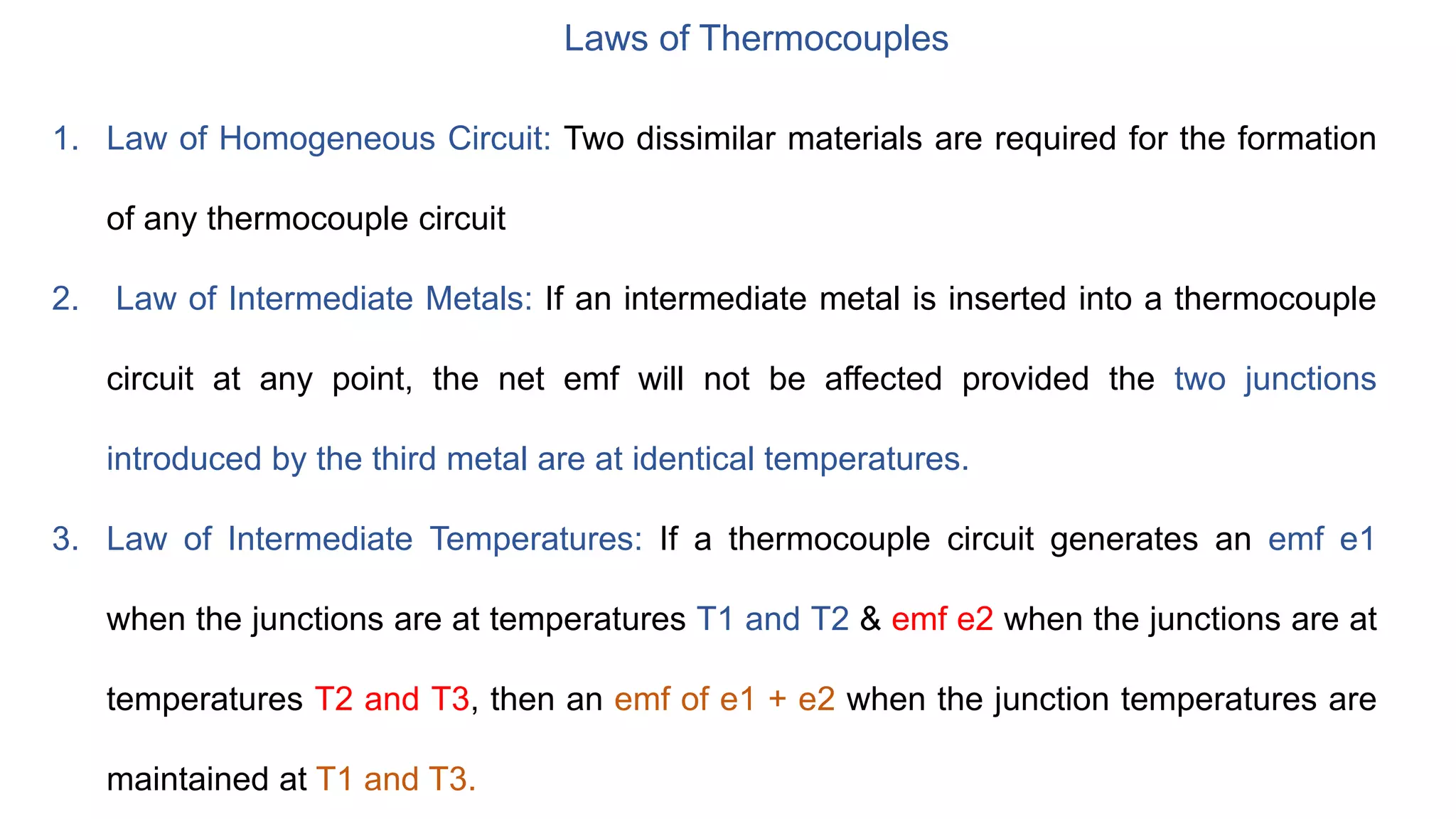
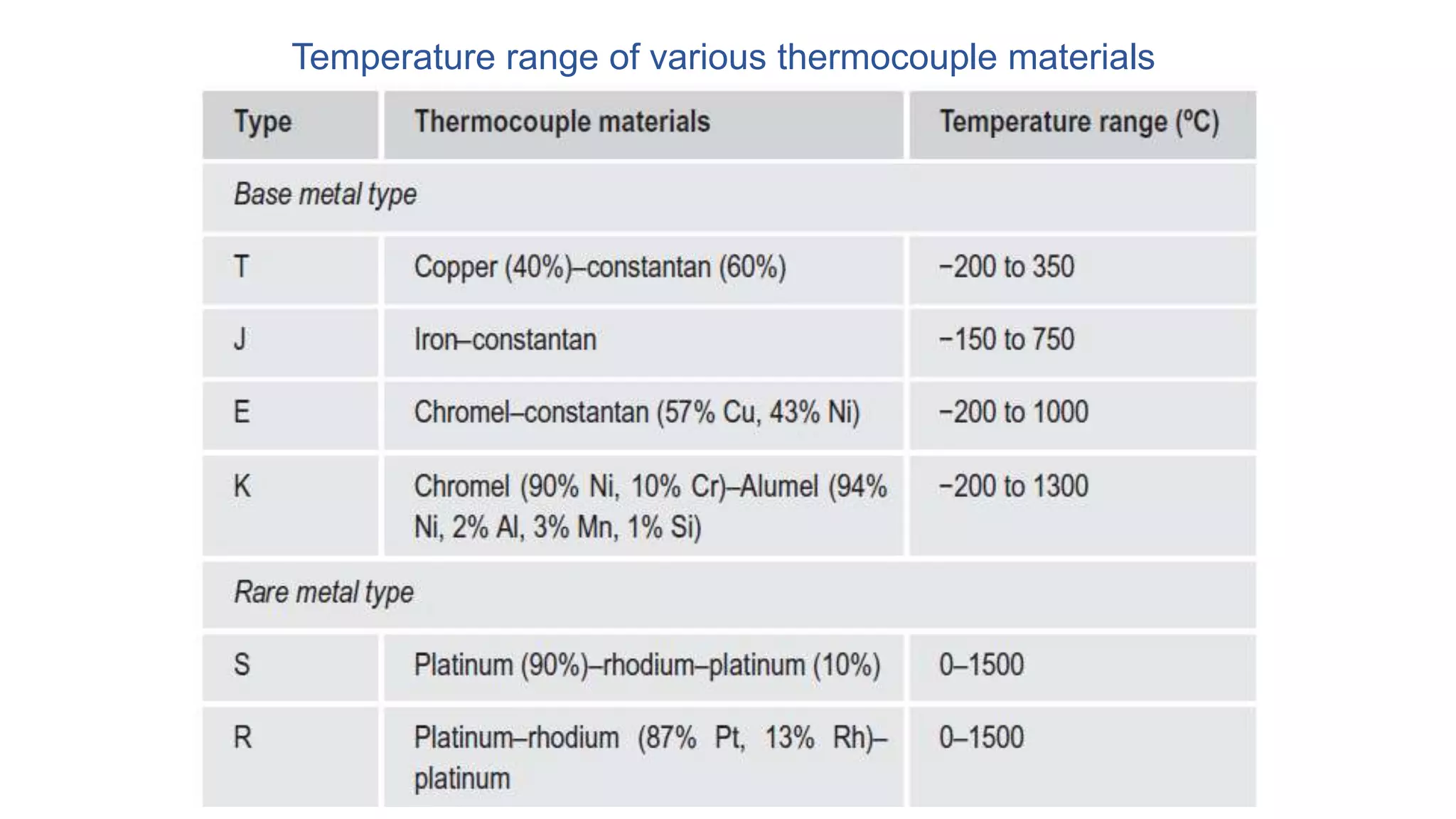
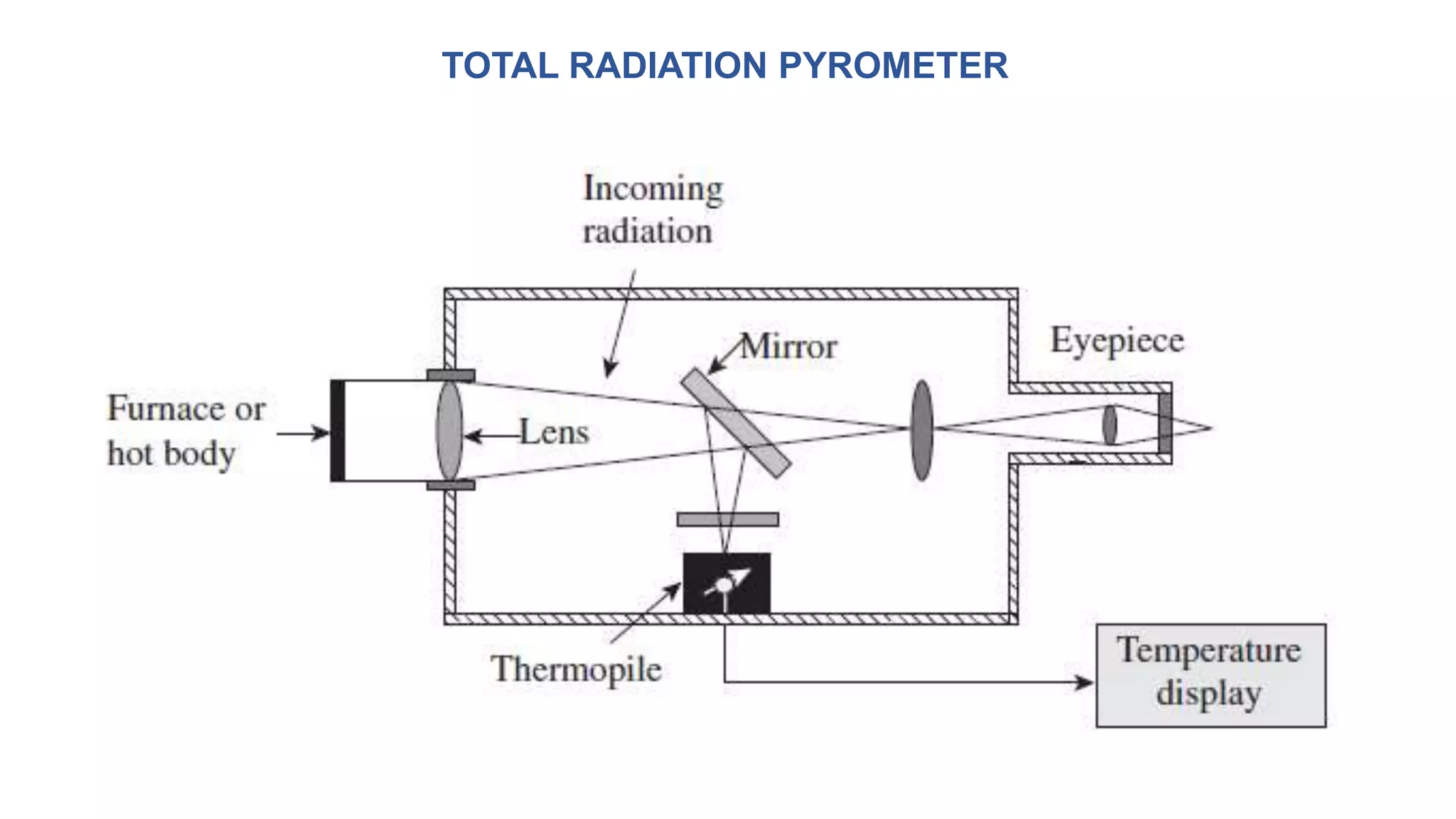
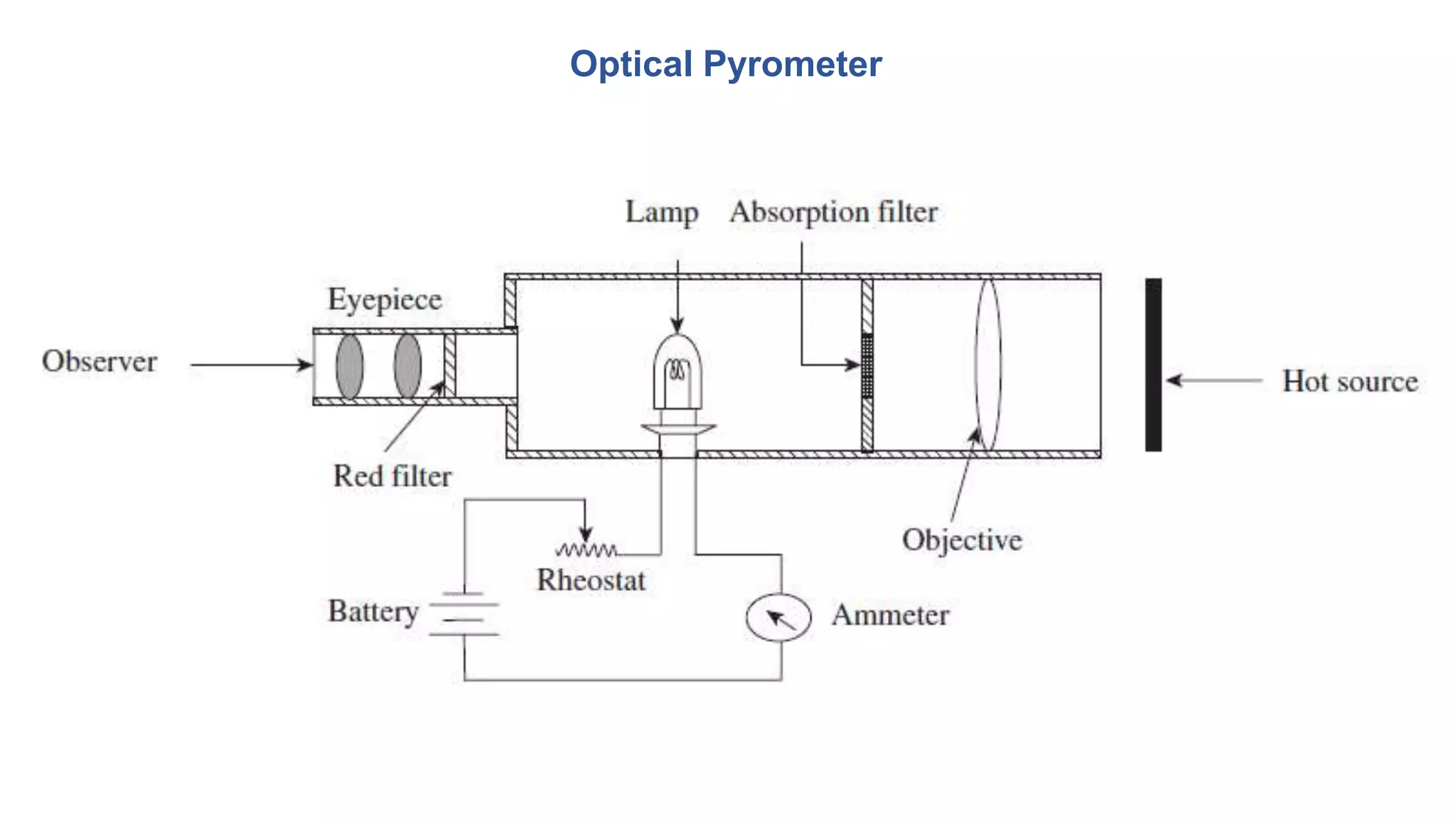
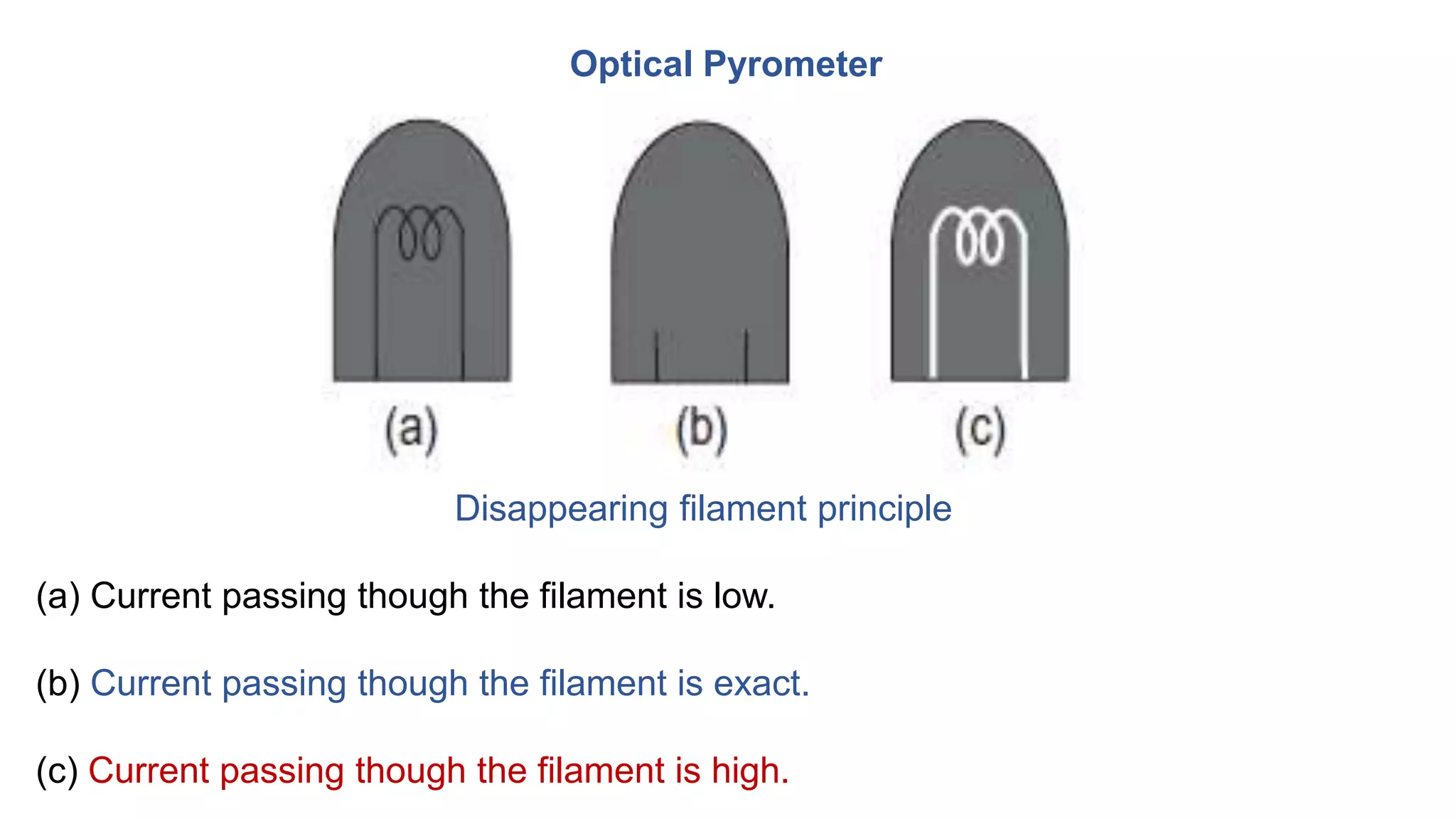

This document provides an overview of mechanical measurements and metrology. It discusses various methods for measuring force, torque, strain, and temperature. For force measurement, it describes direct methods using analytical balances and platform balances, as well as indirect methods using load cells and proving rings with strain gauges. Torque measurement uses dynamometers like the Prony brake. Strain is measured using electrical resistance strain gauges. Temperature is sensed using contact sensors like thermocouples and resistance temperature detectors or non-contact sensors like pyrometers.






















































































