Downloaded 48 times

![18
Hysteresis
It refers to the difference
between upscale sequence
of calibration and downscale
sequence of calibration
he=({y}upscale-{y}downscale)x=x1
Hysteresis error = [he(max)/FSOR] ×100
FSOR : Full Scale Output Reading
Fig. Internal force verses extension
of a rubber band follows
hysteresis. External force is in
opposition to internal force
E.g. Potentiometer used as
displacement sensor with
significant losses](https://image.slidesharecdn.com/introductiontosensors-170114034928/85/Introduction-to-sensors-18-320.jpg)

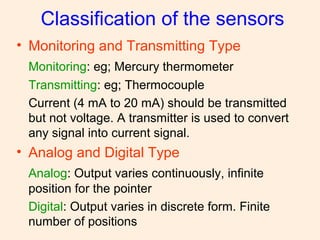
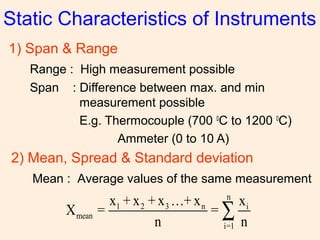
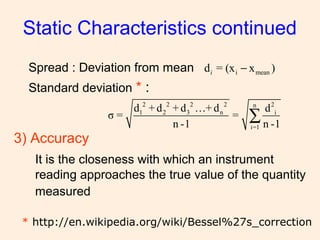
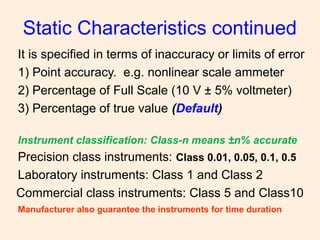
The document discusses advanced instrumentation concepts, including sensor types, transducers, signal conditioning, and biomedical instrumentation. It details classifications of sensors, static characteristics, measurement accuracy, and common errors in measurement processes. Additionally, it covers essential topics like calibration, hysteresis, linearity, and the effects of various factors on measuring instruments.