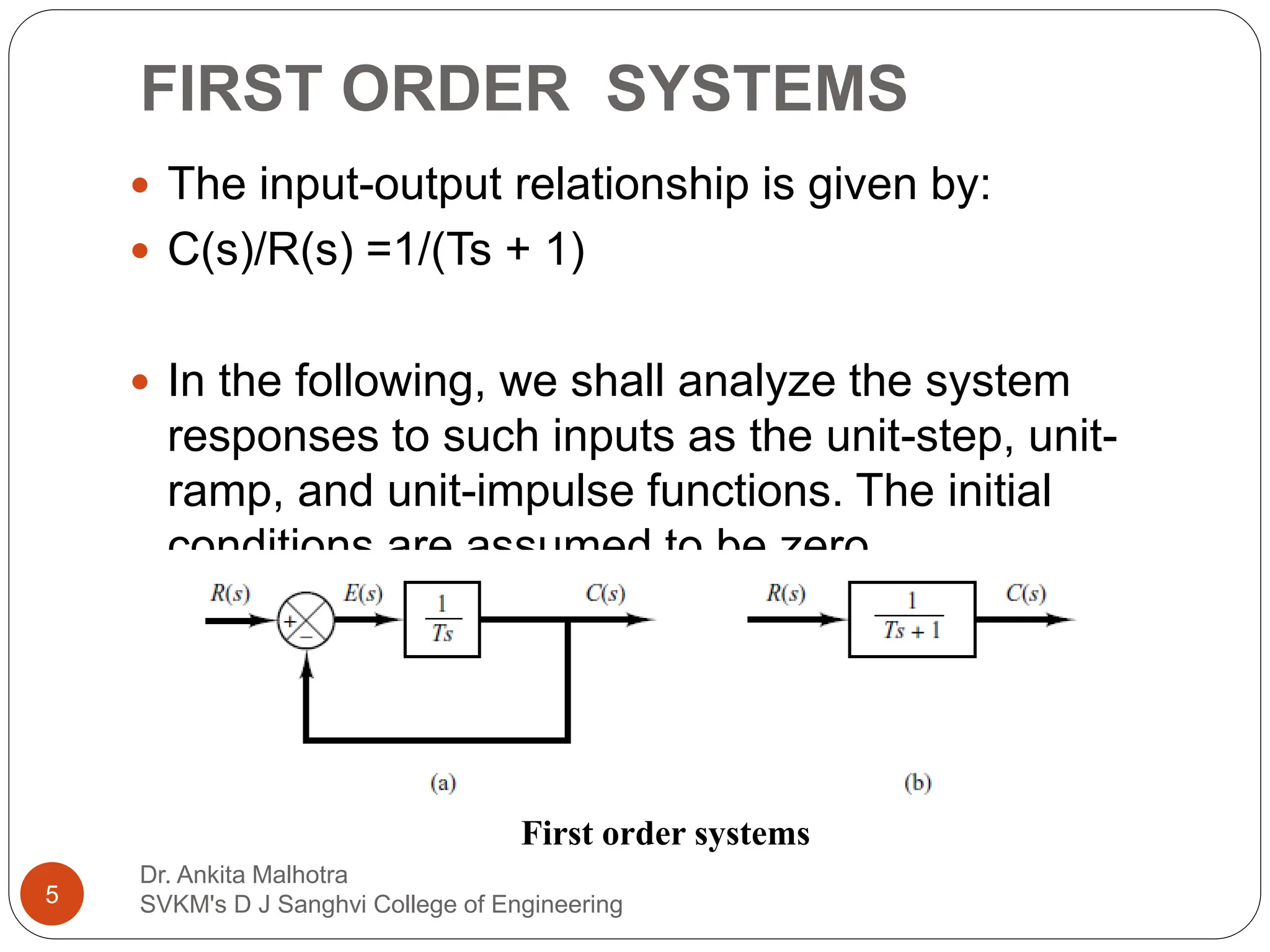
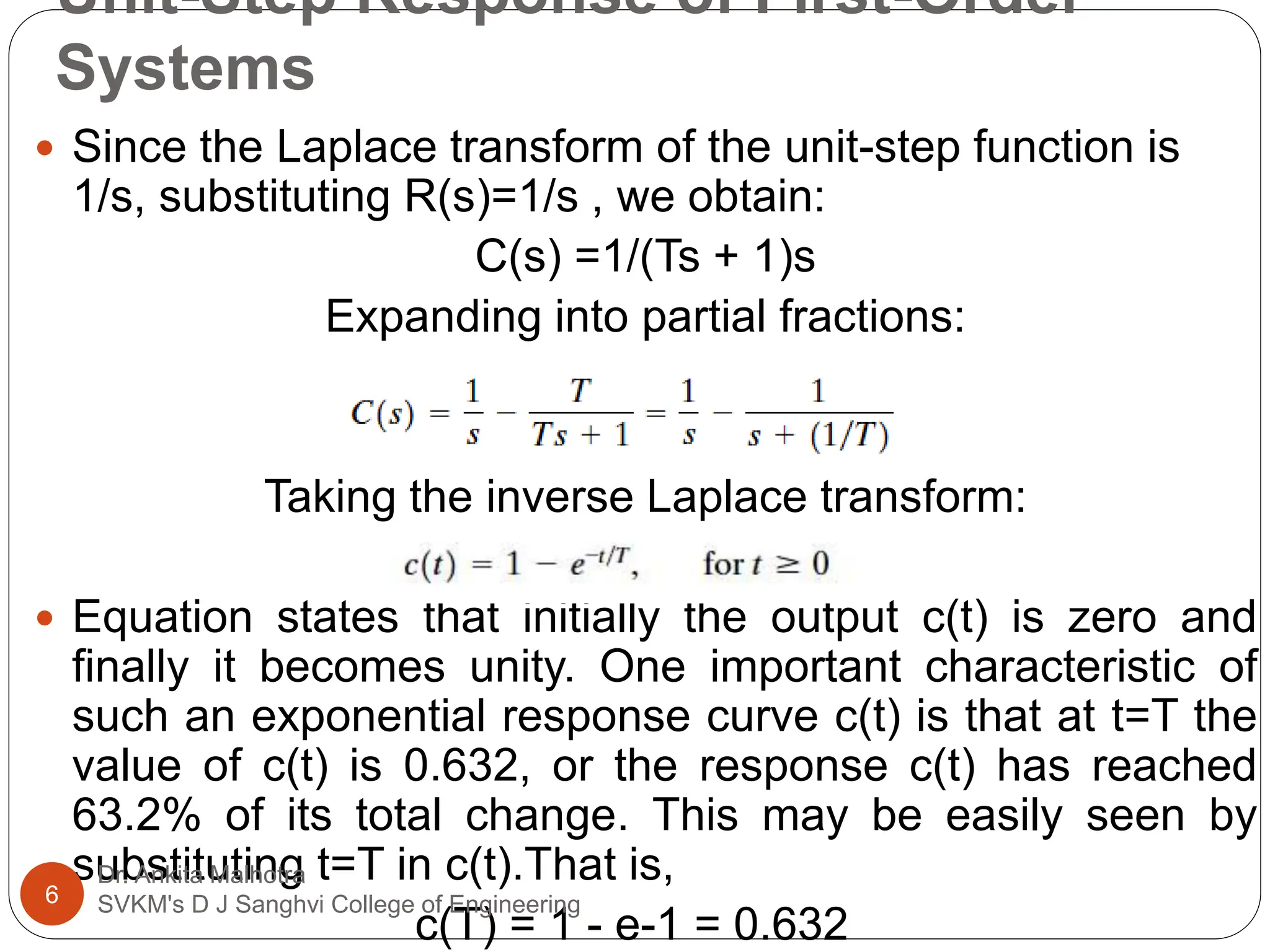
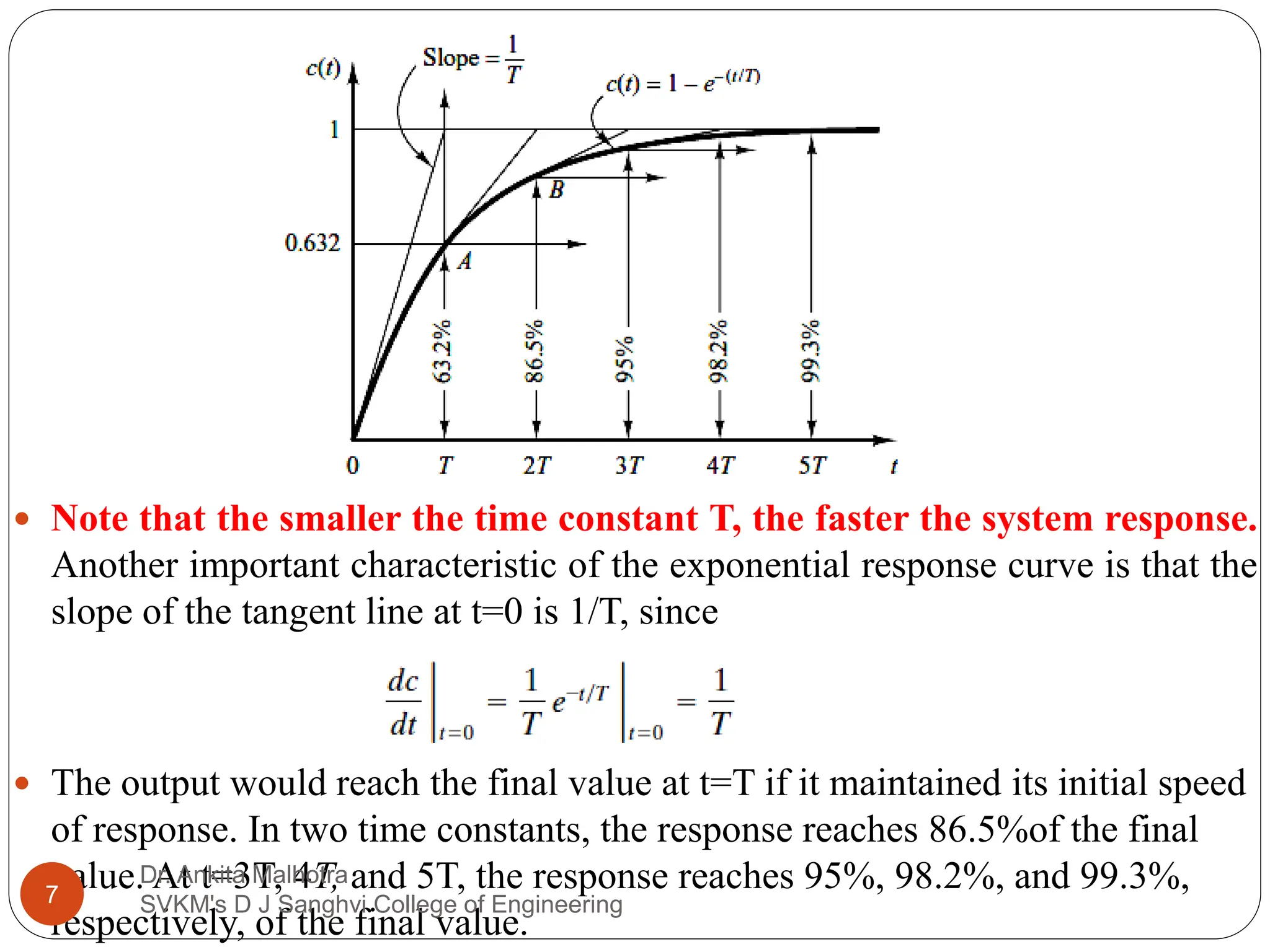
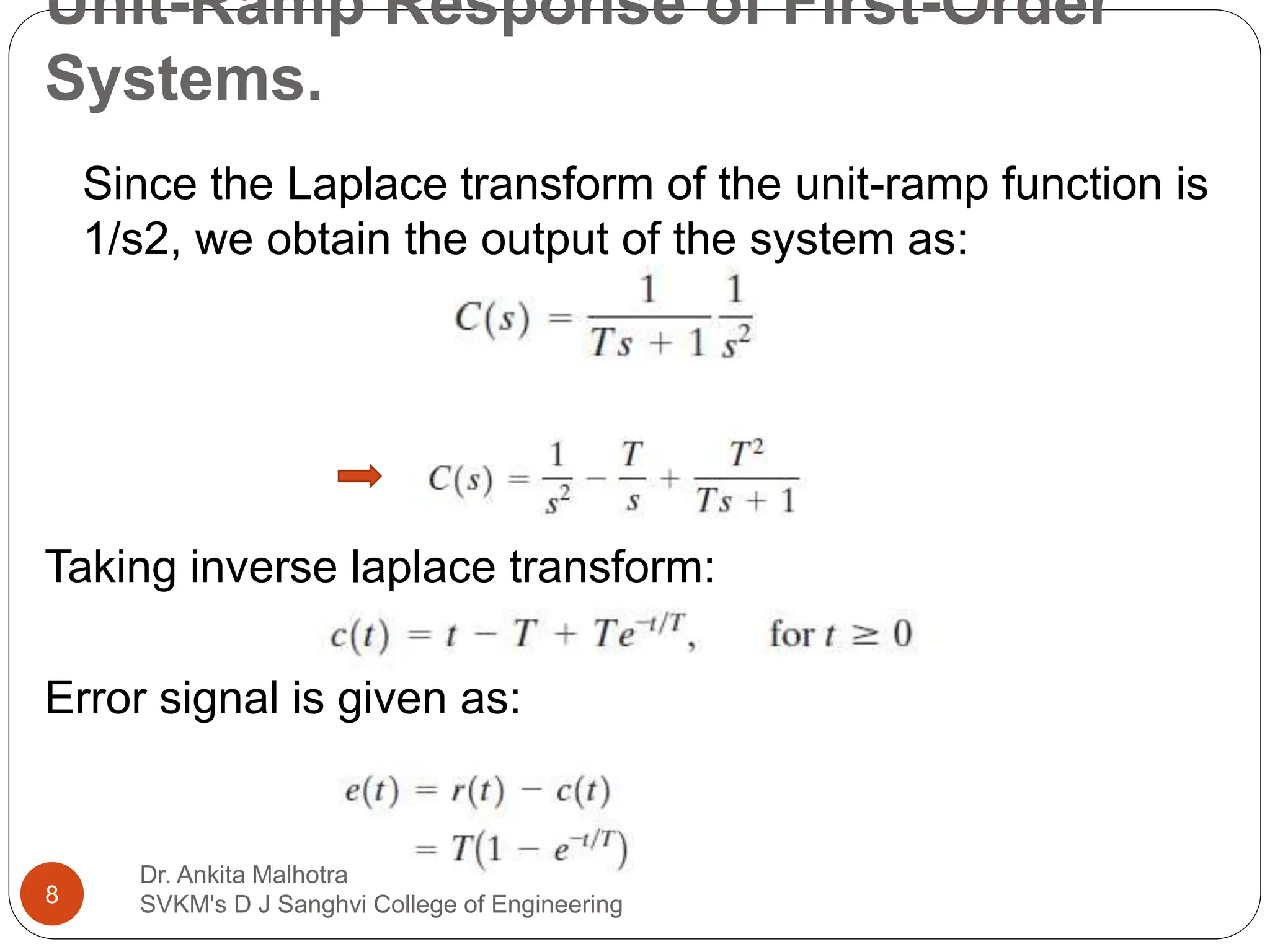
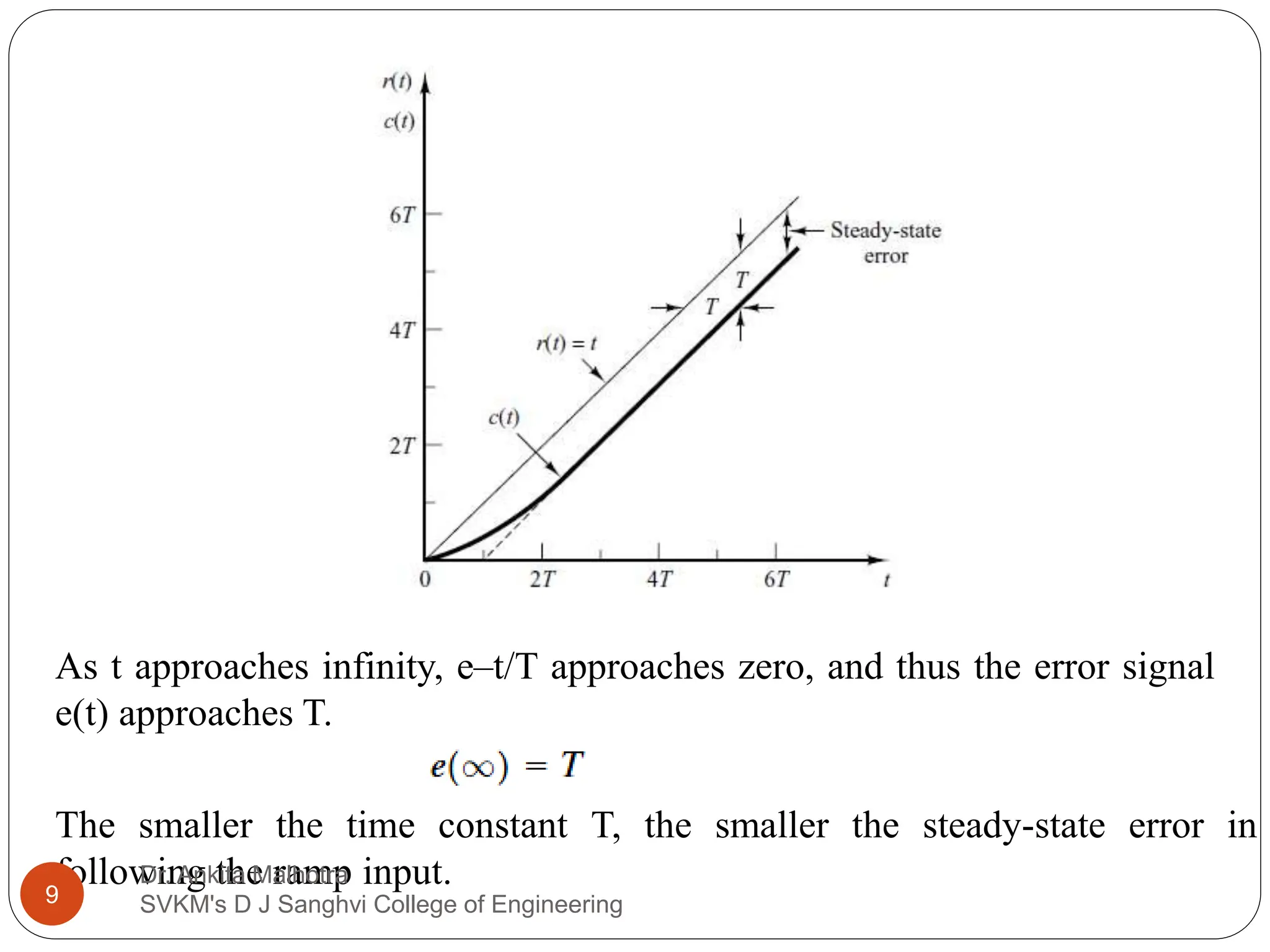
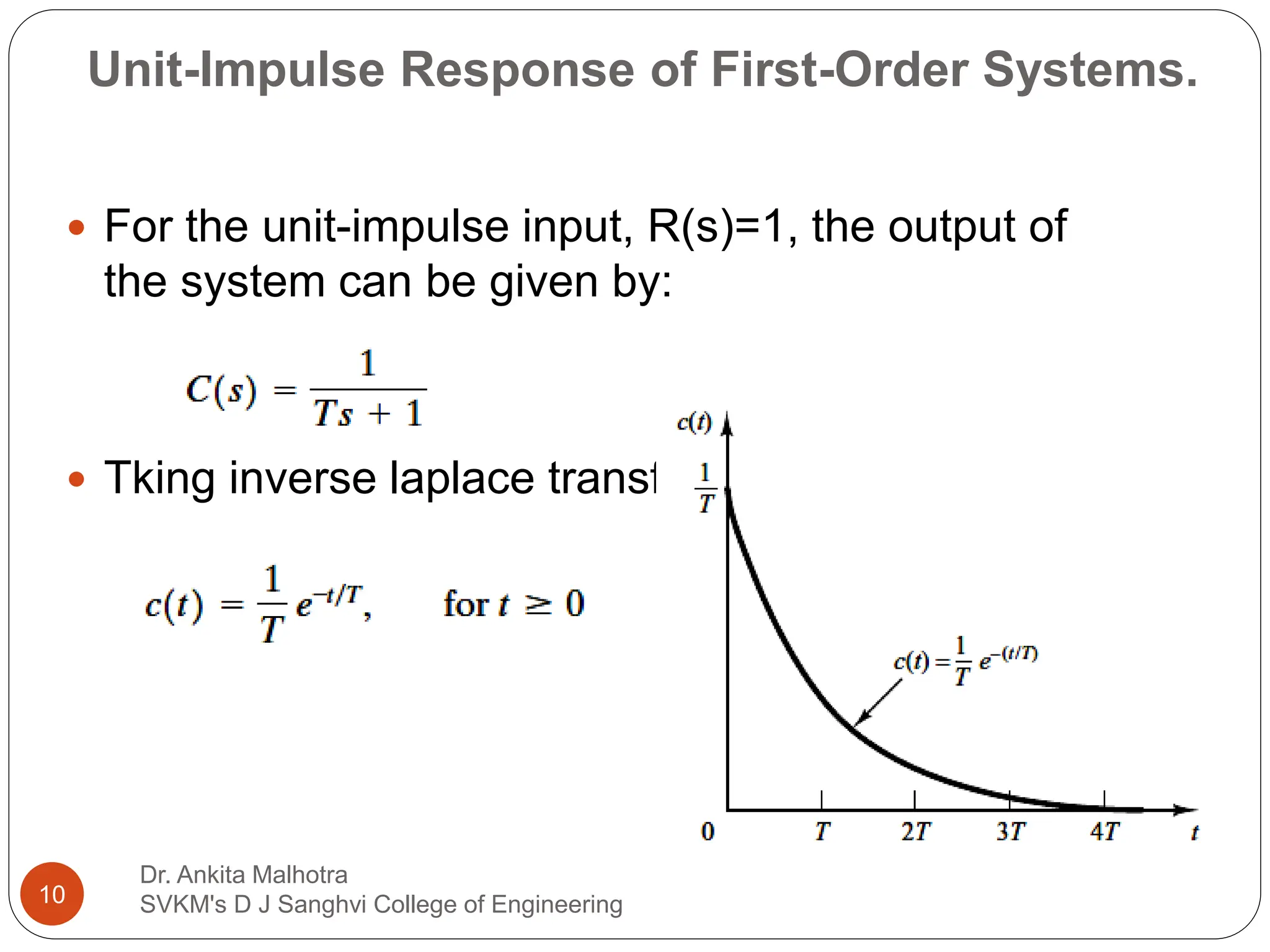
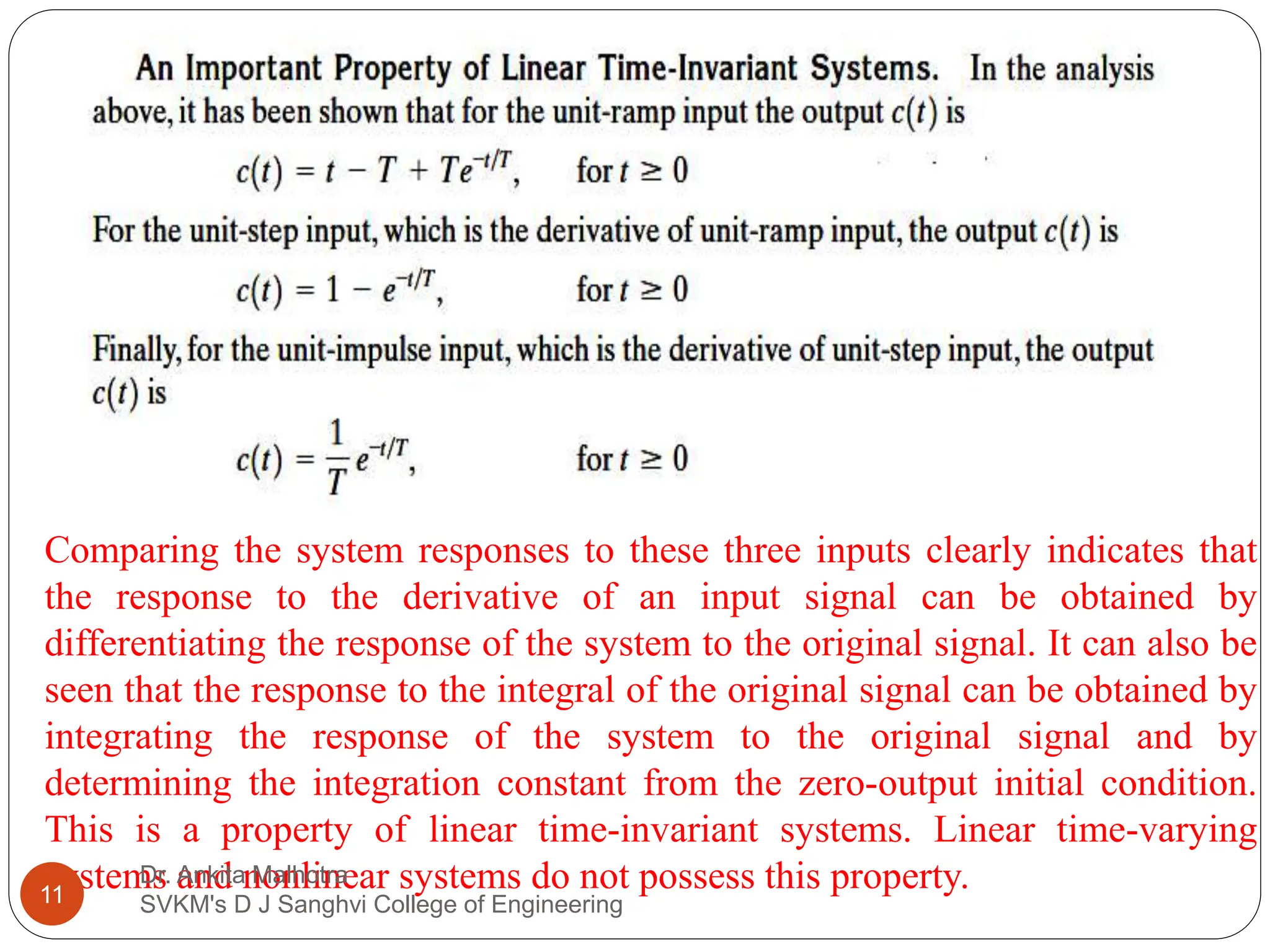
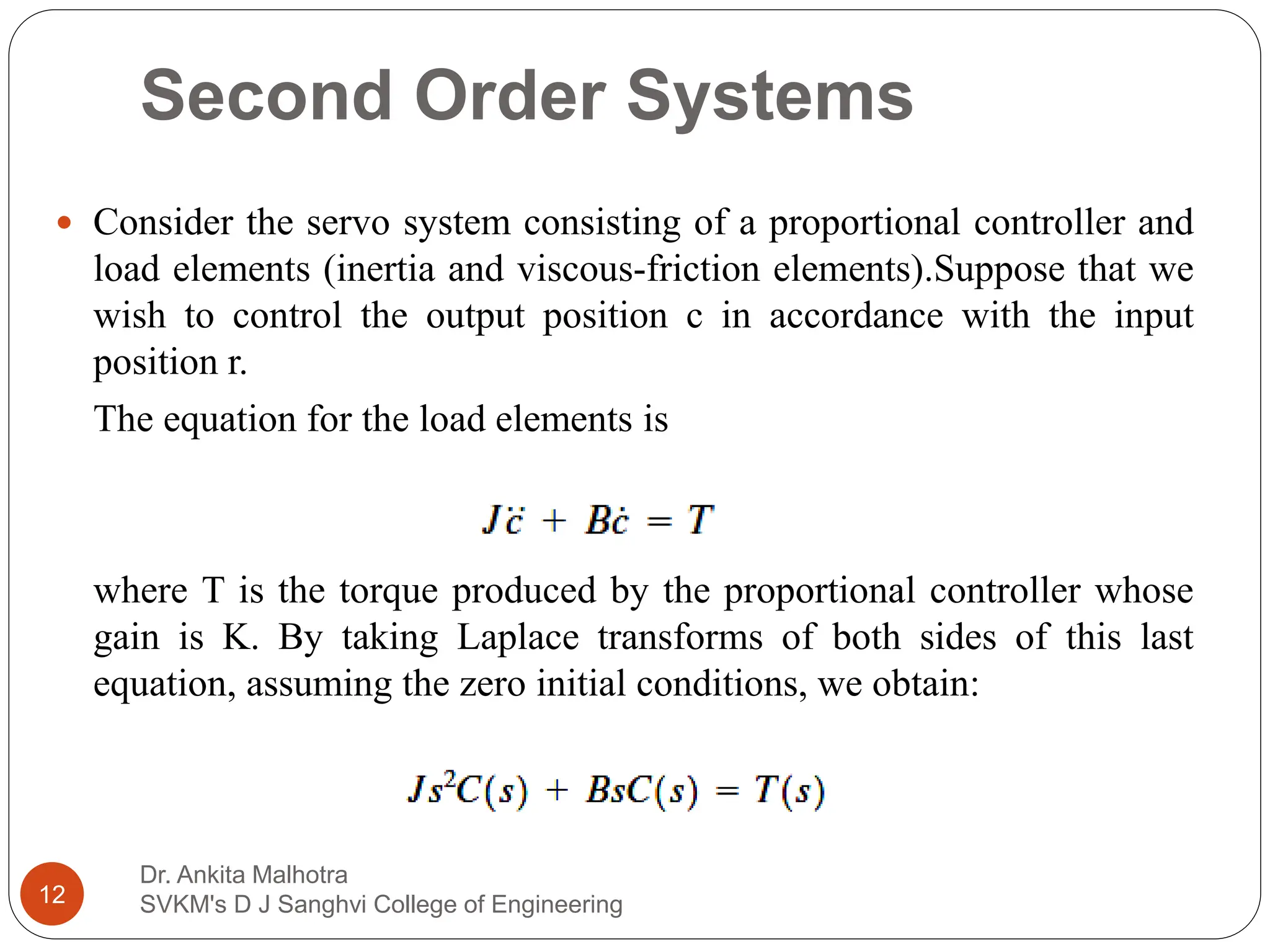
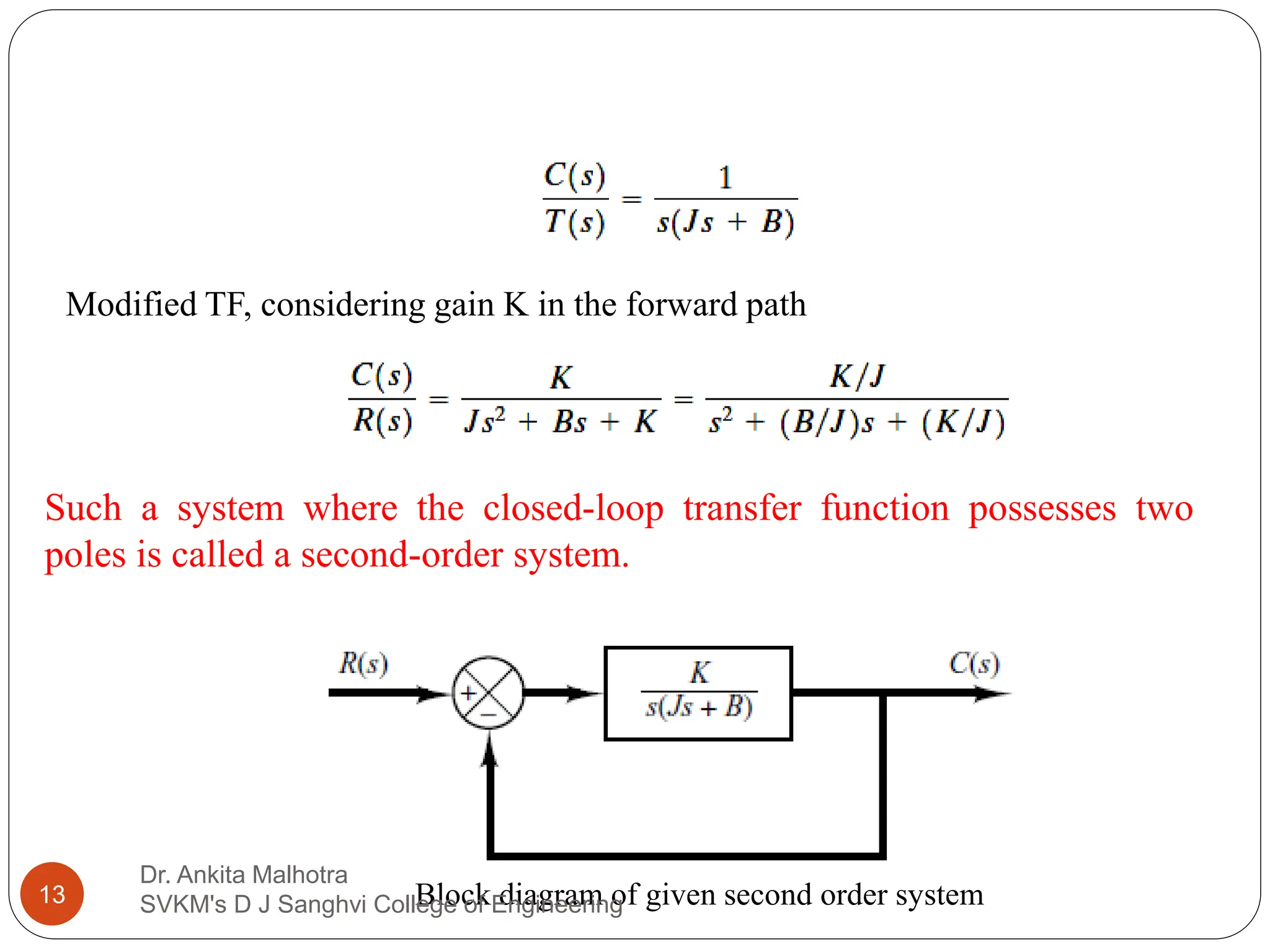
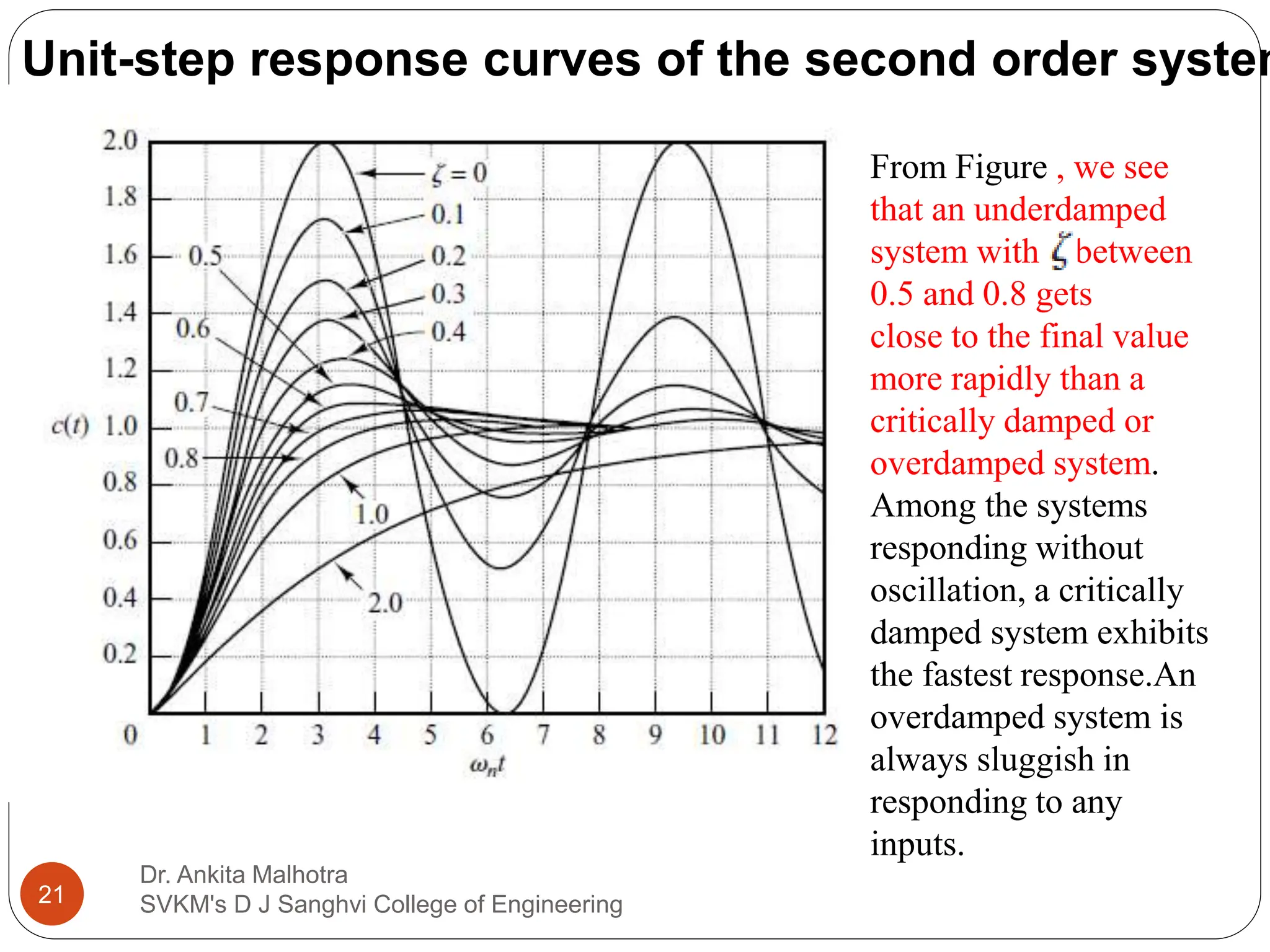
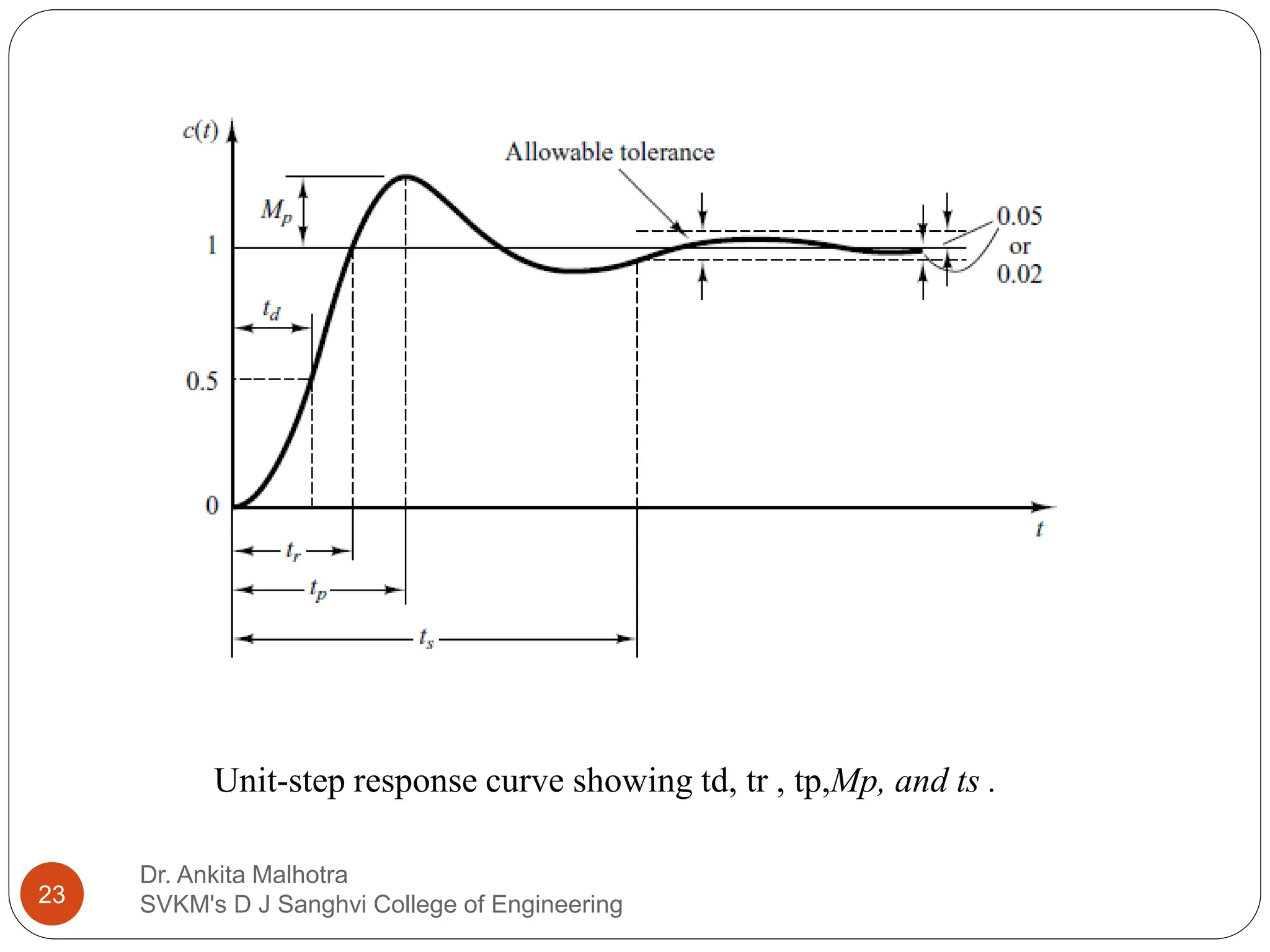
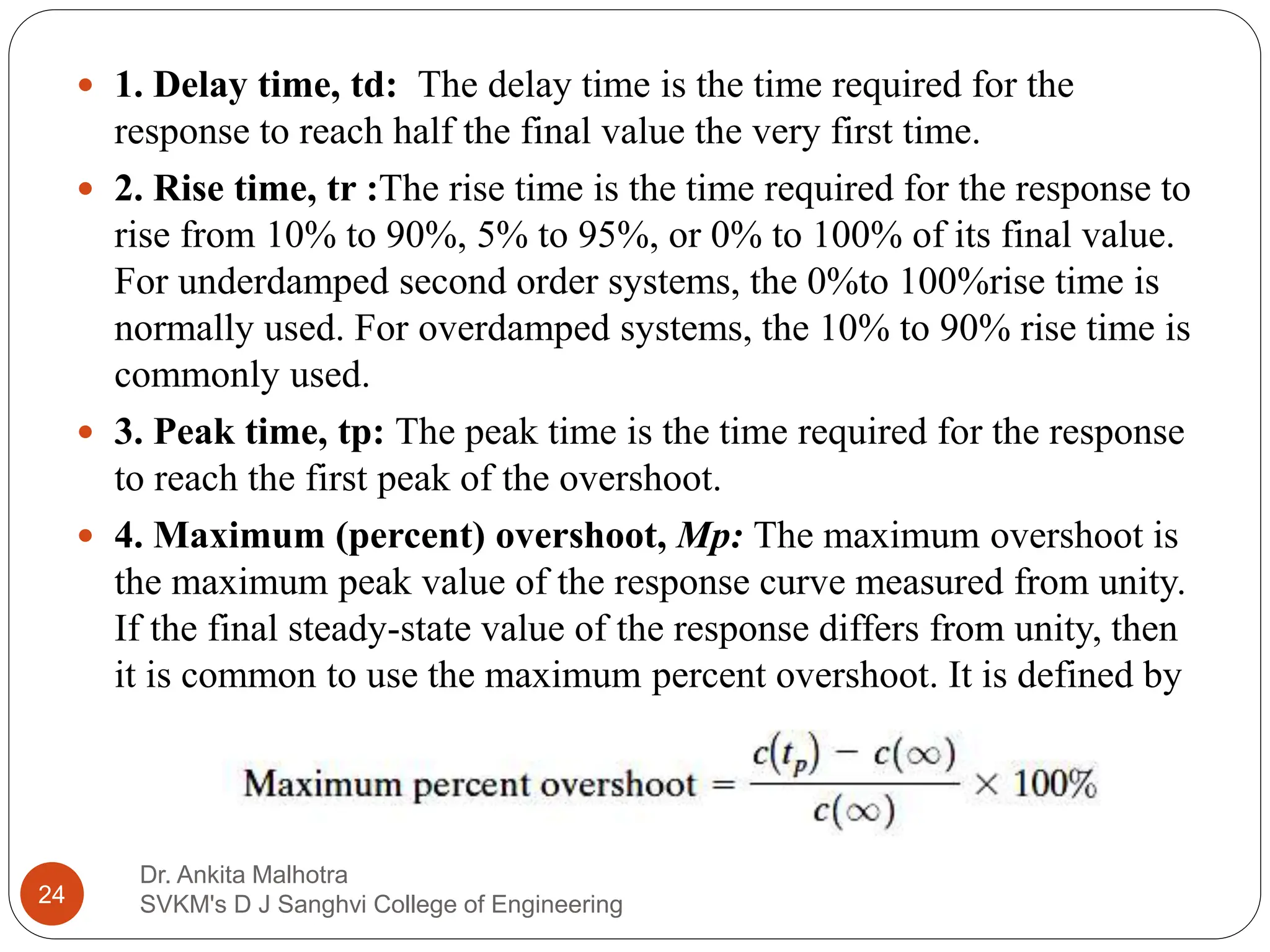
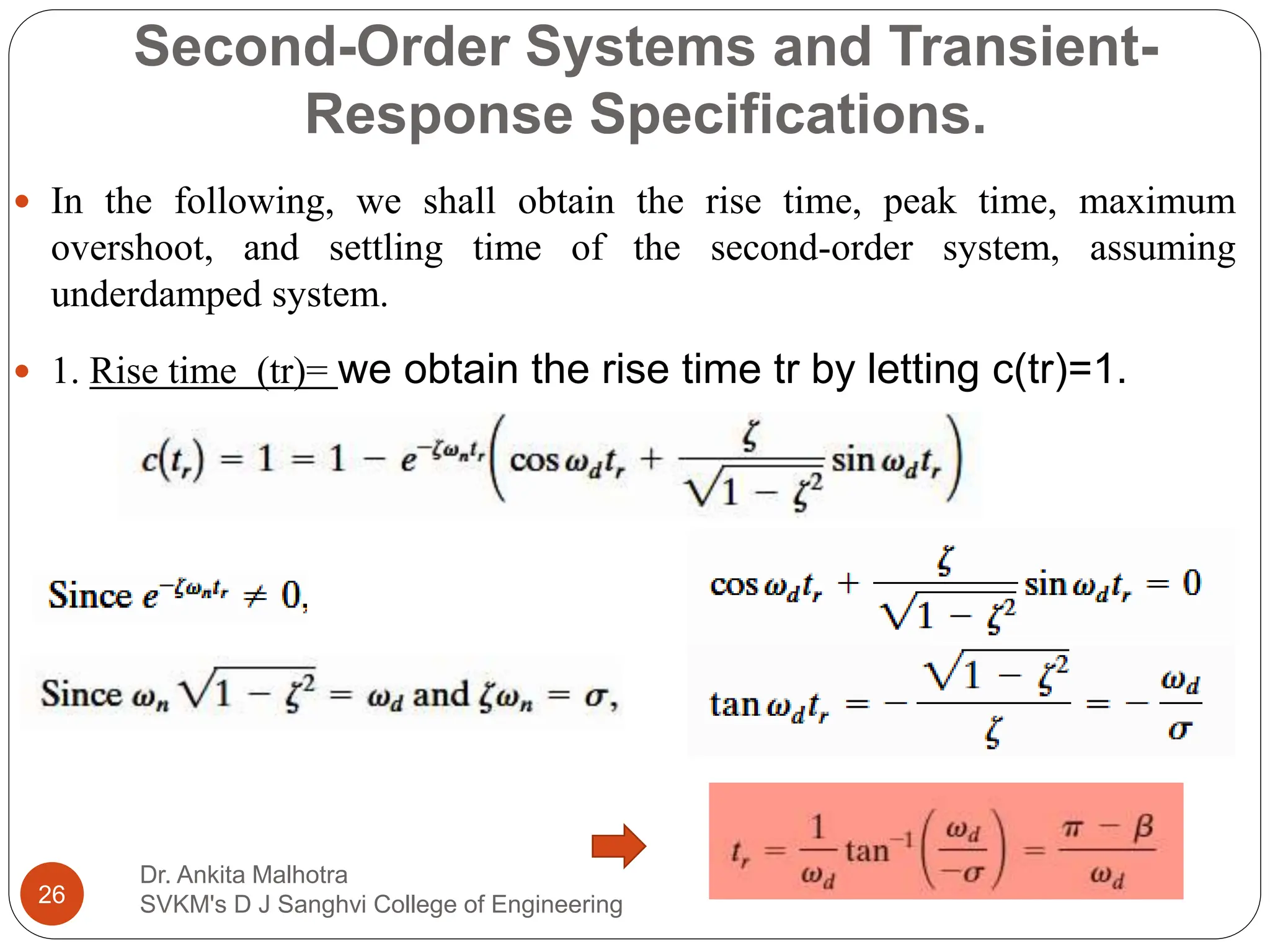
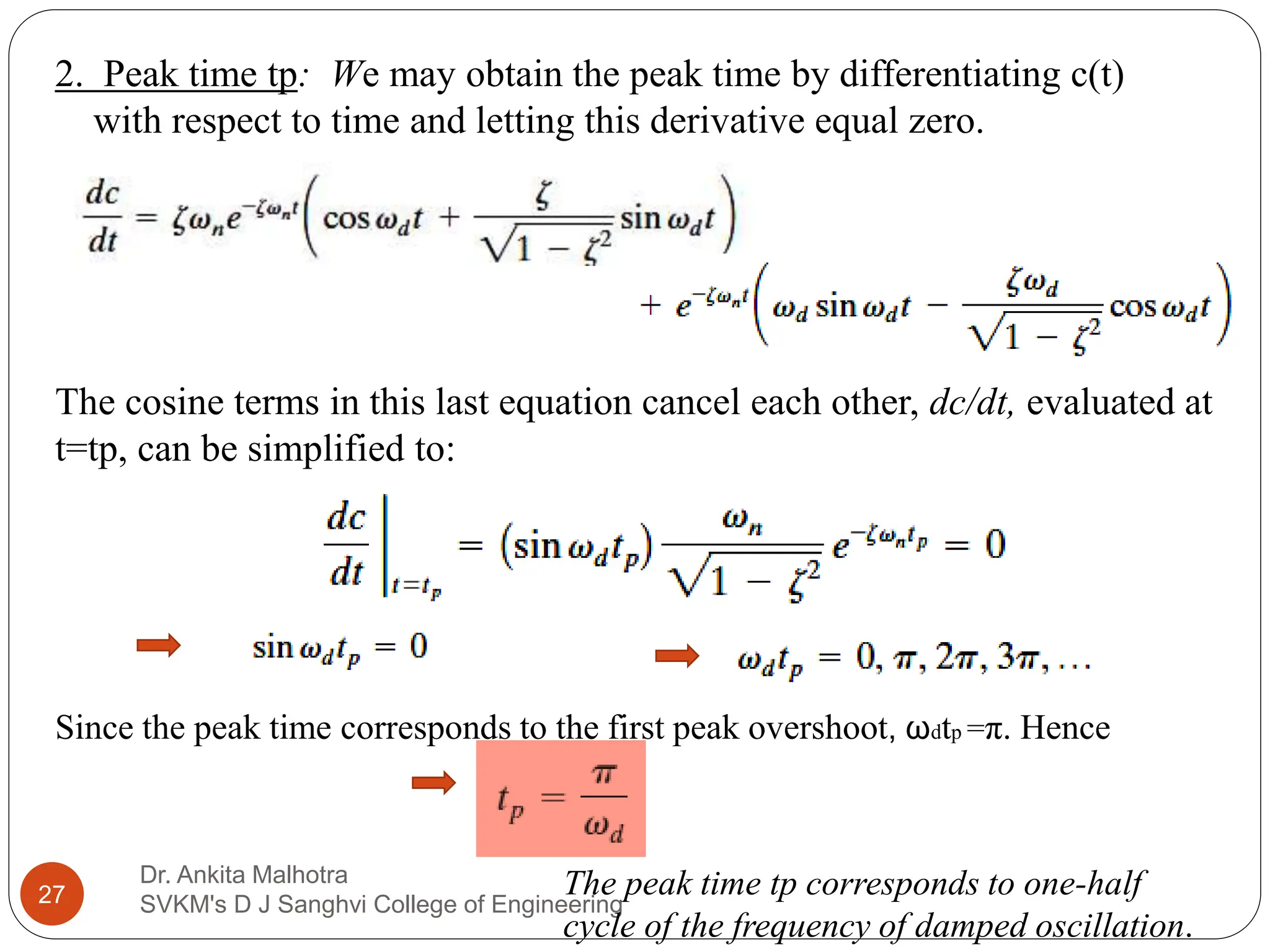
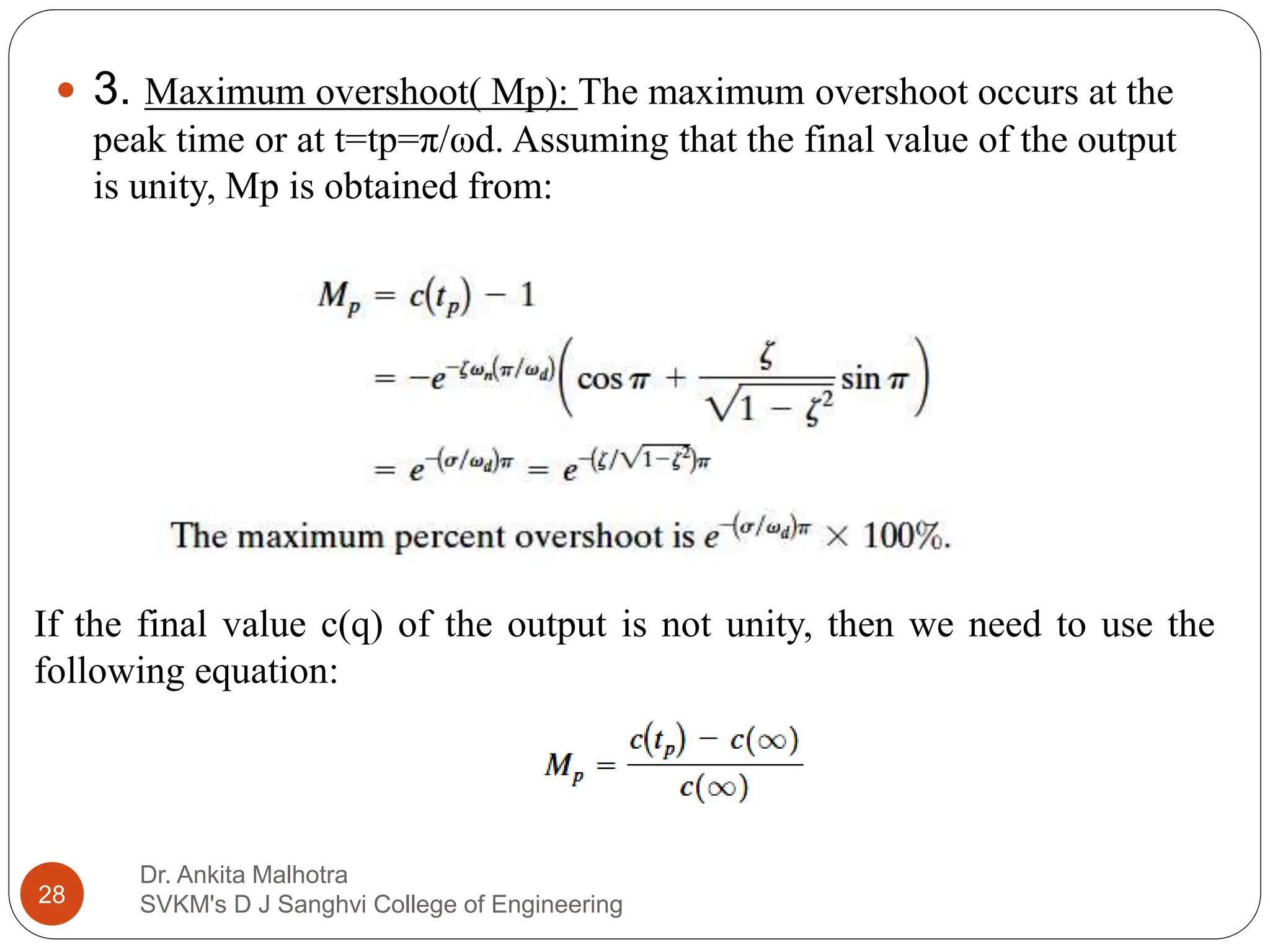
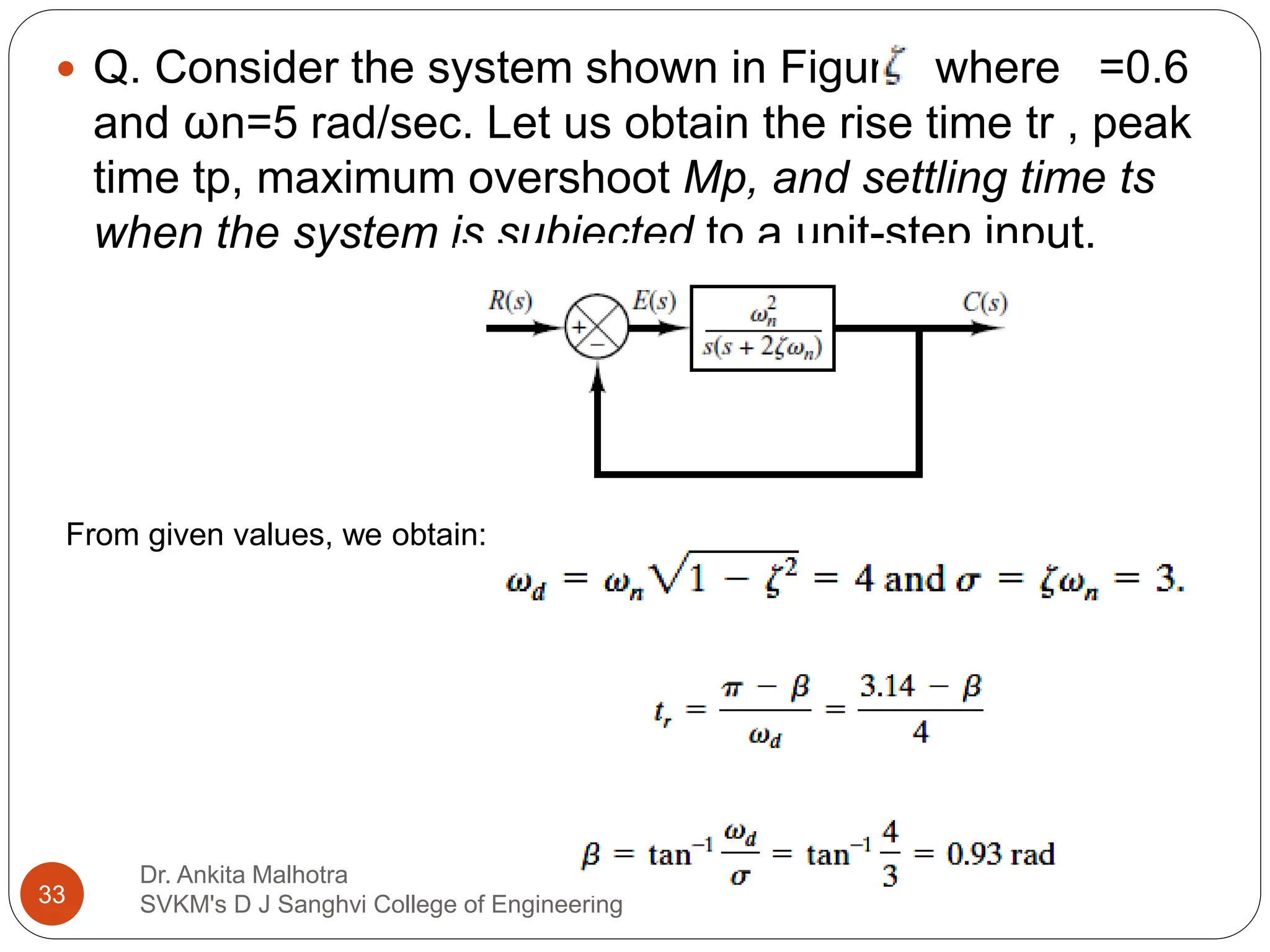
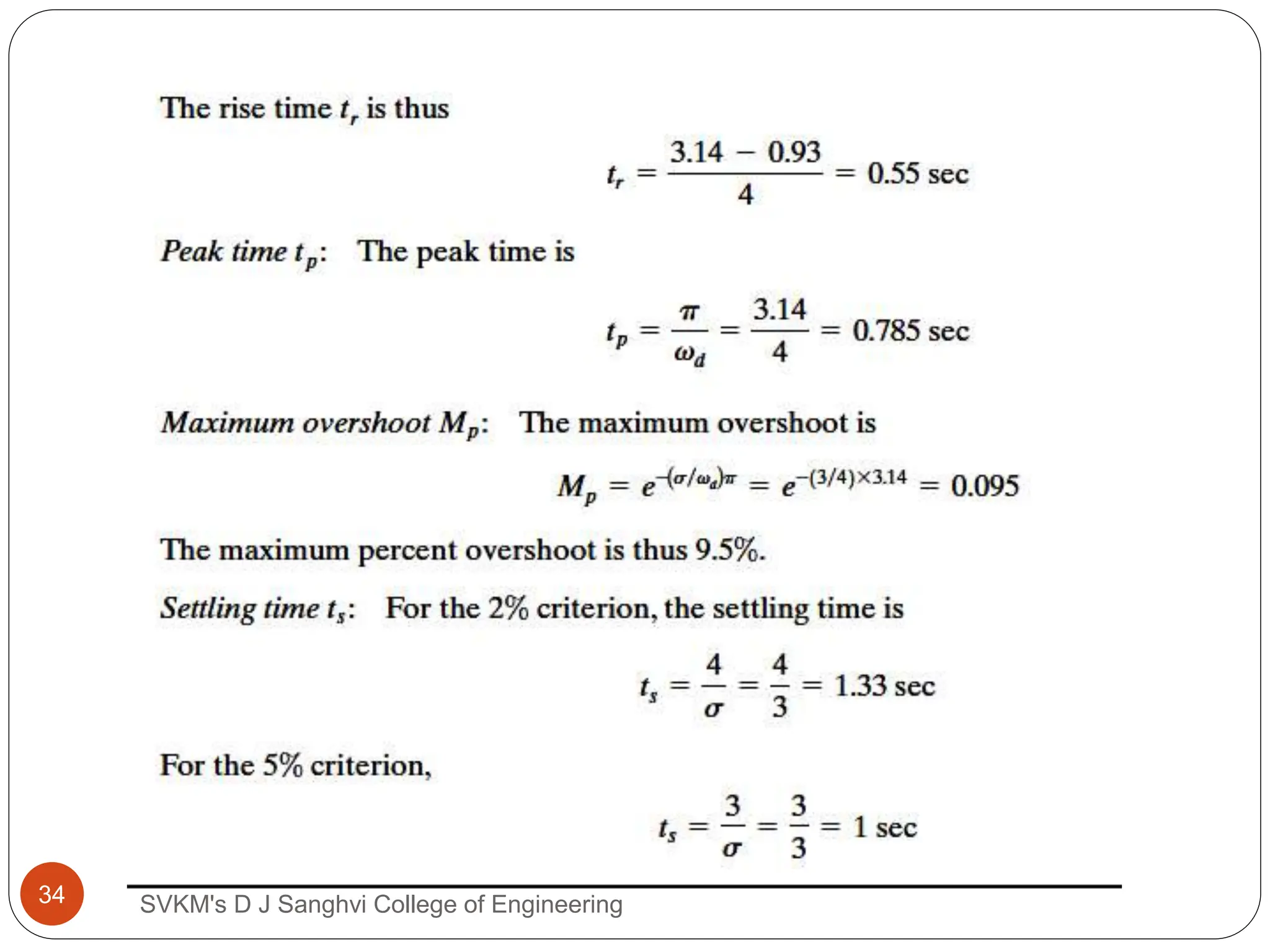
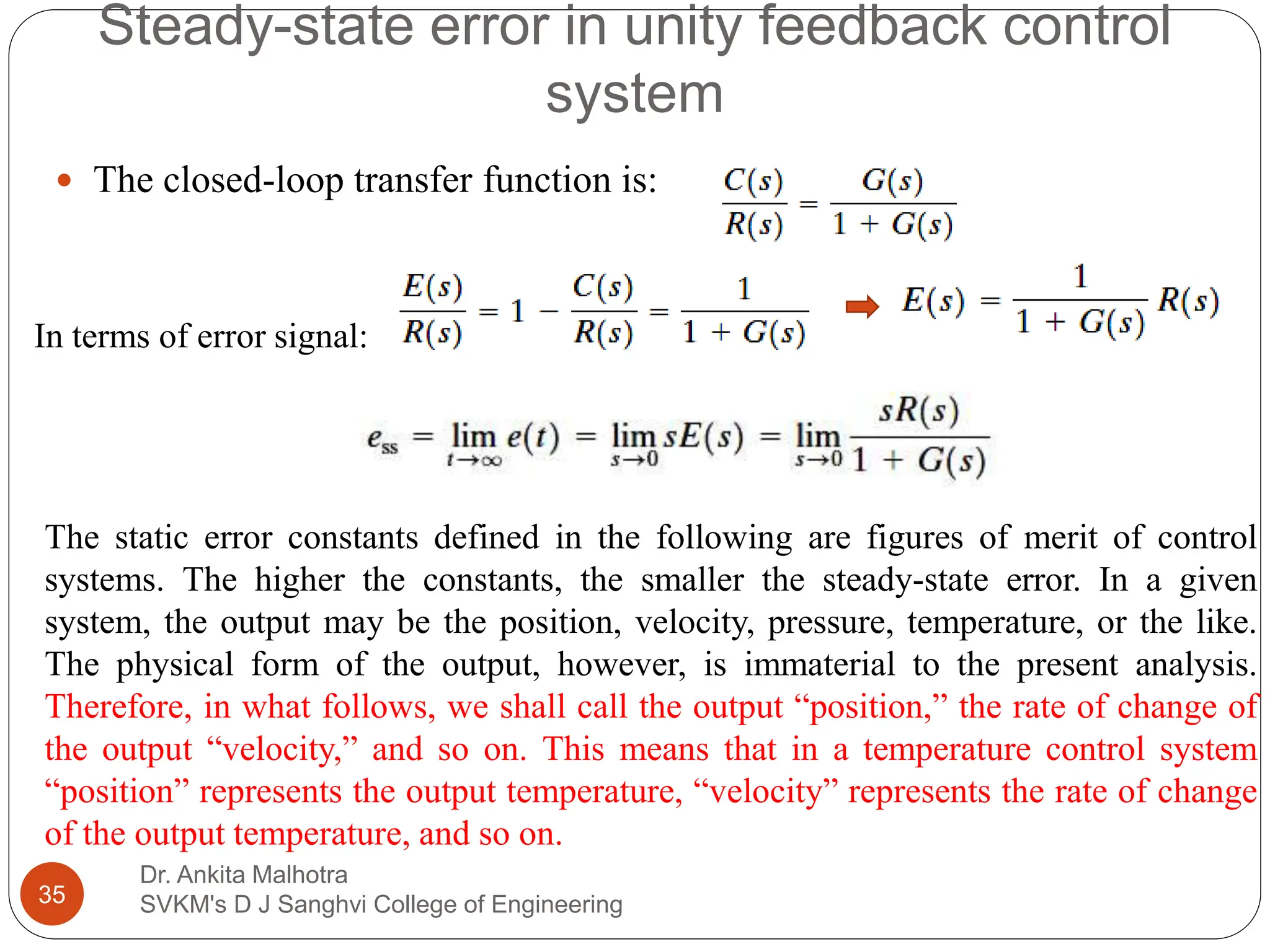
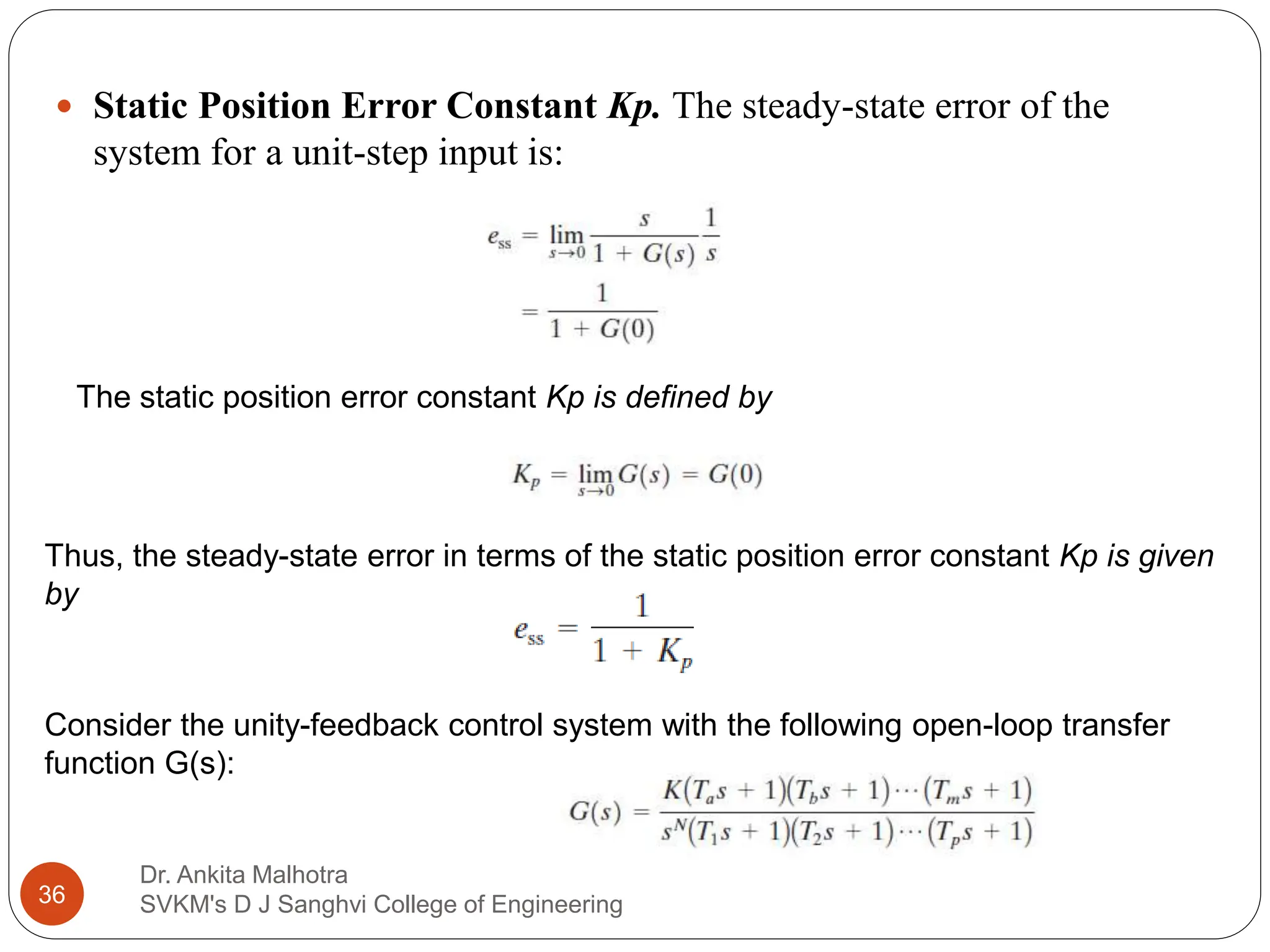
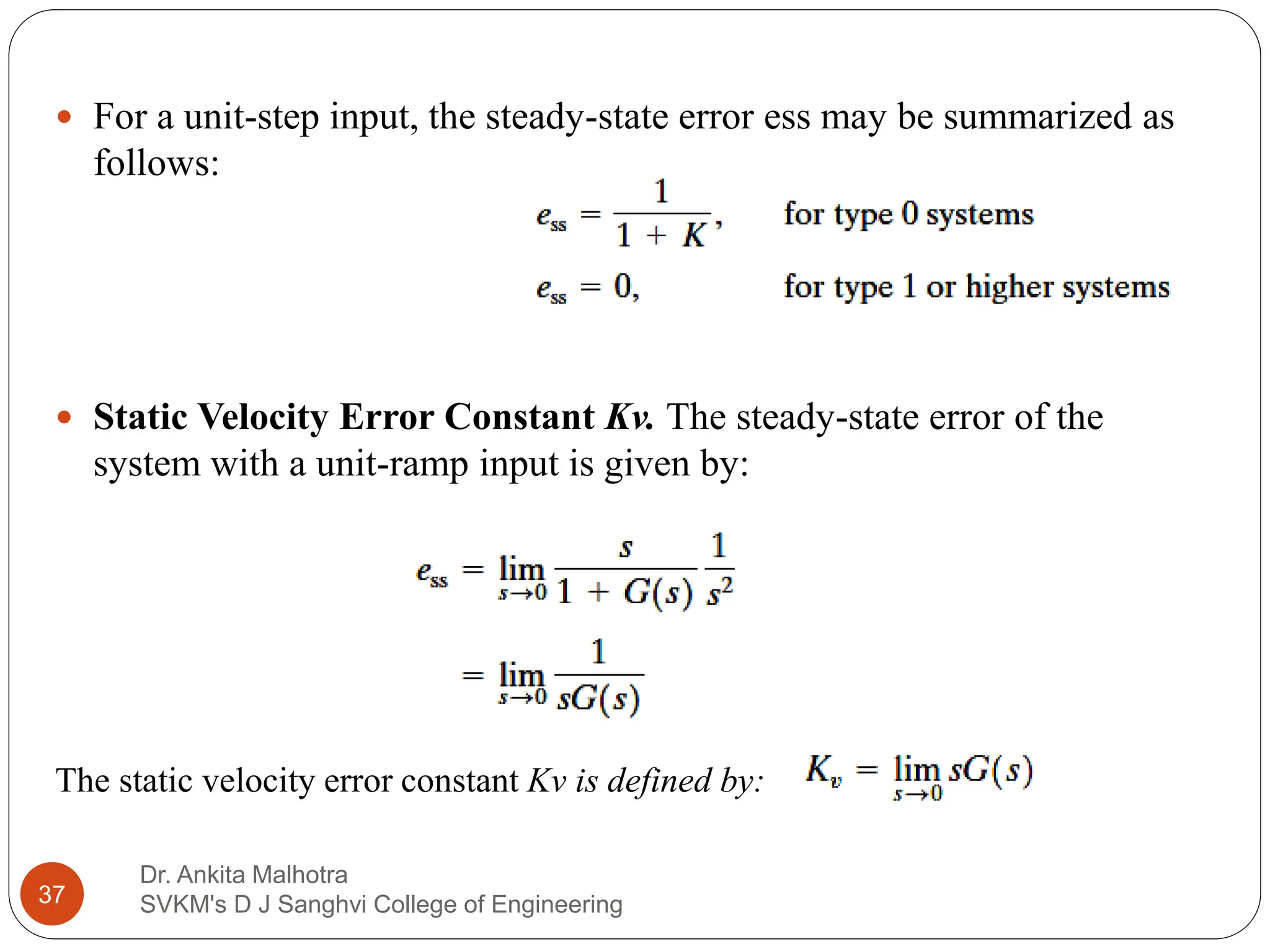
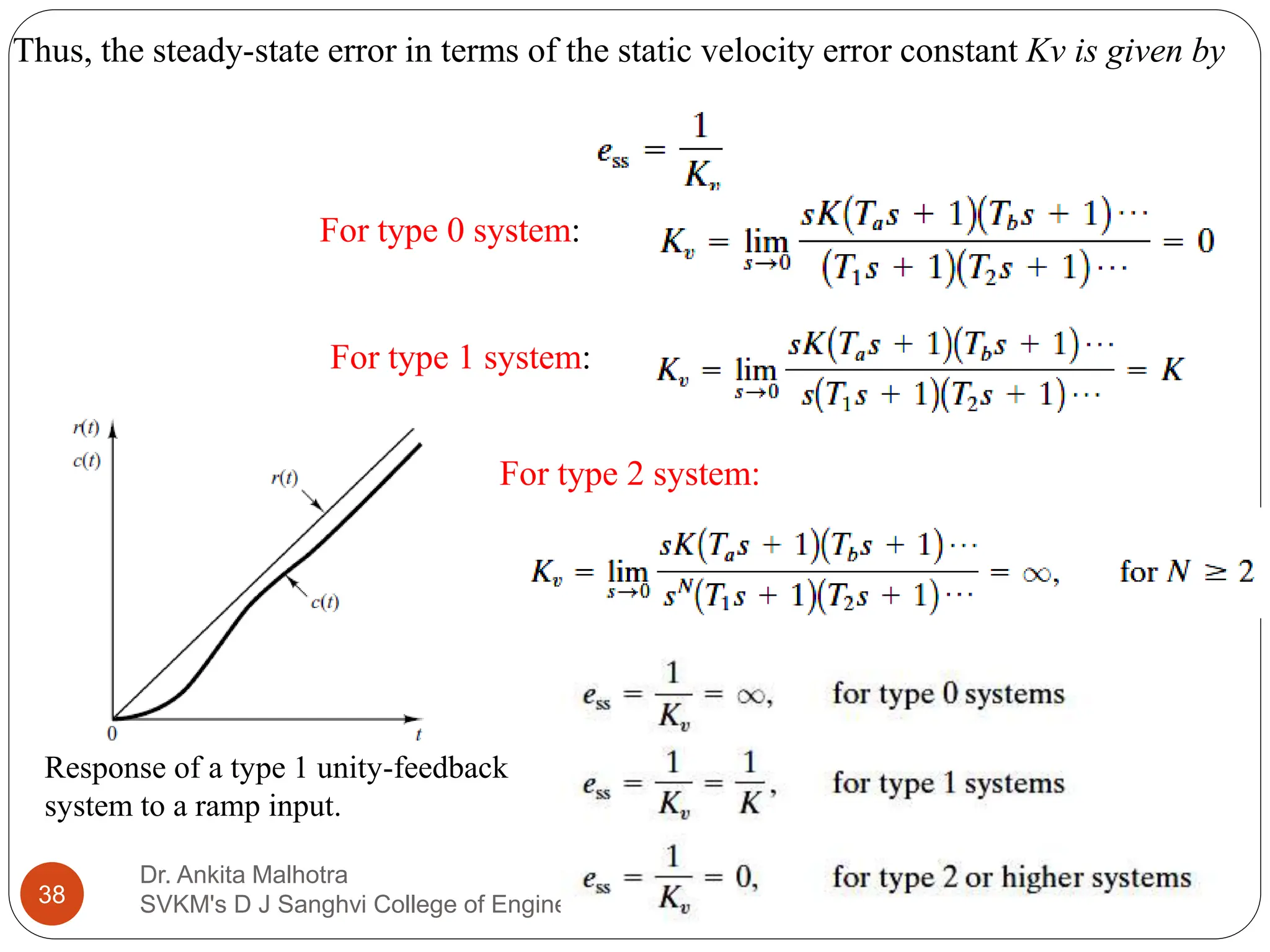
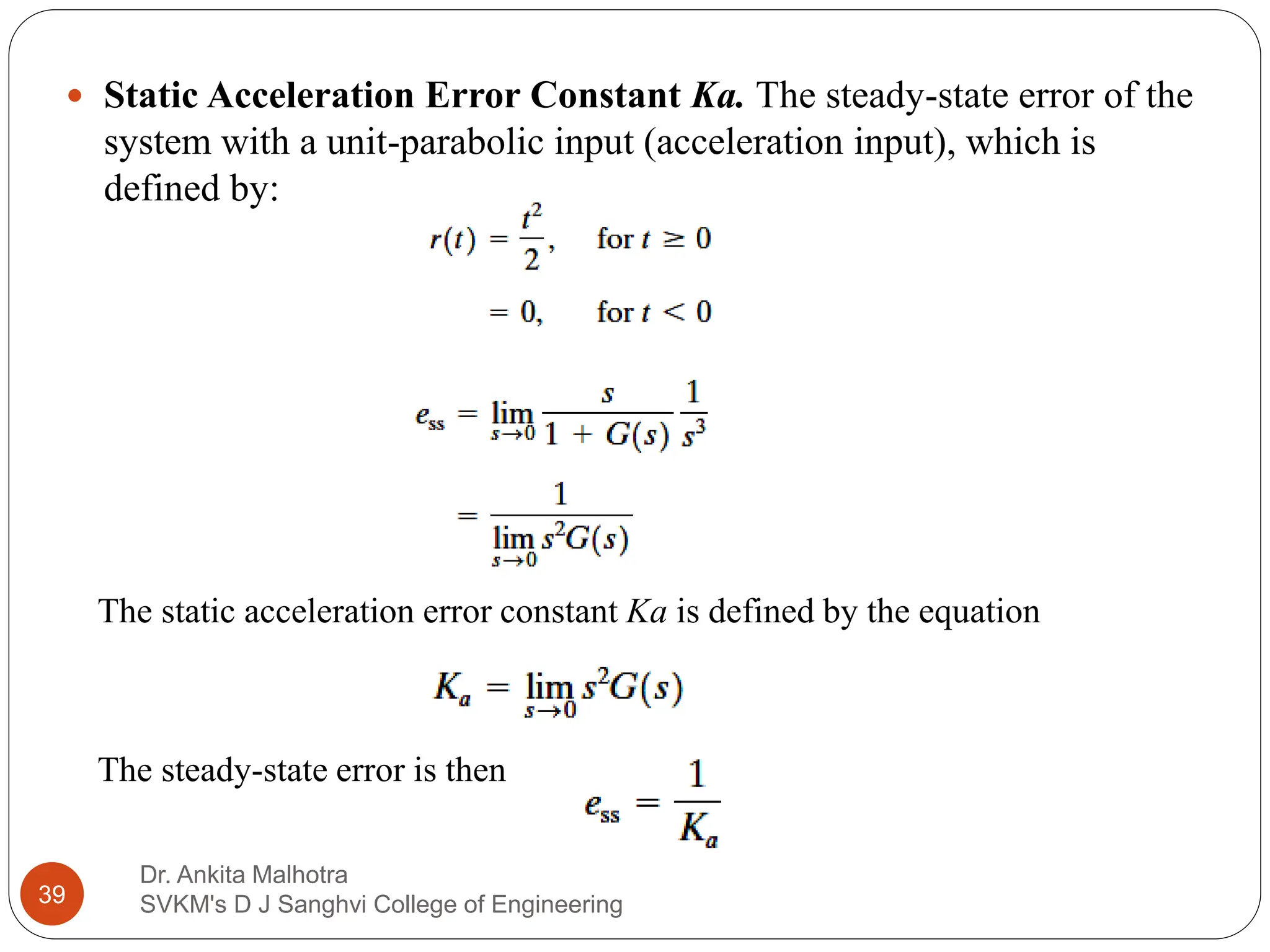
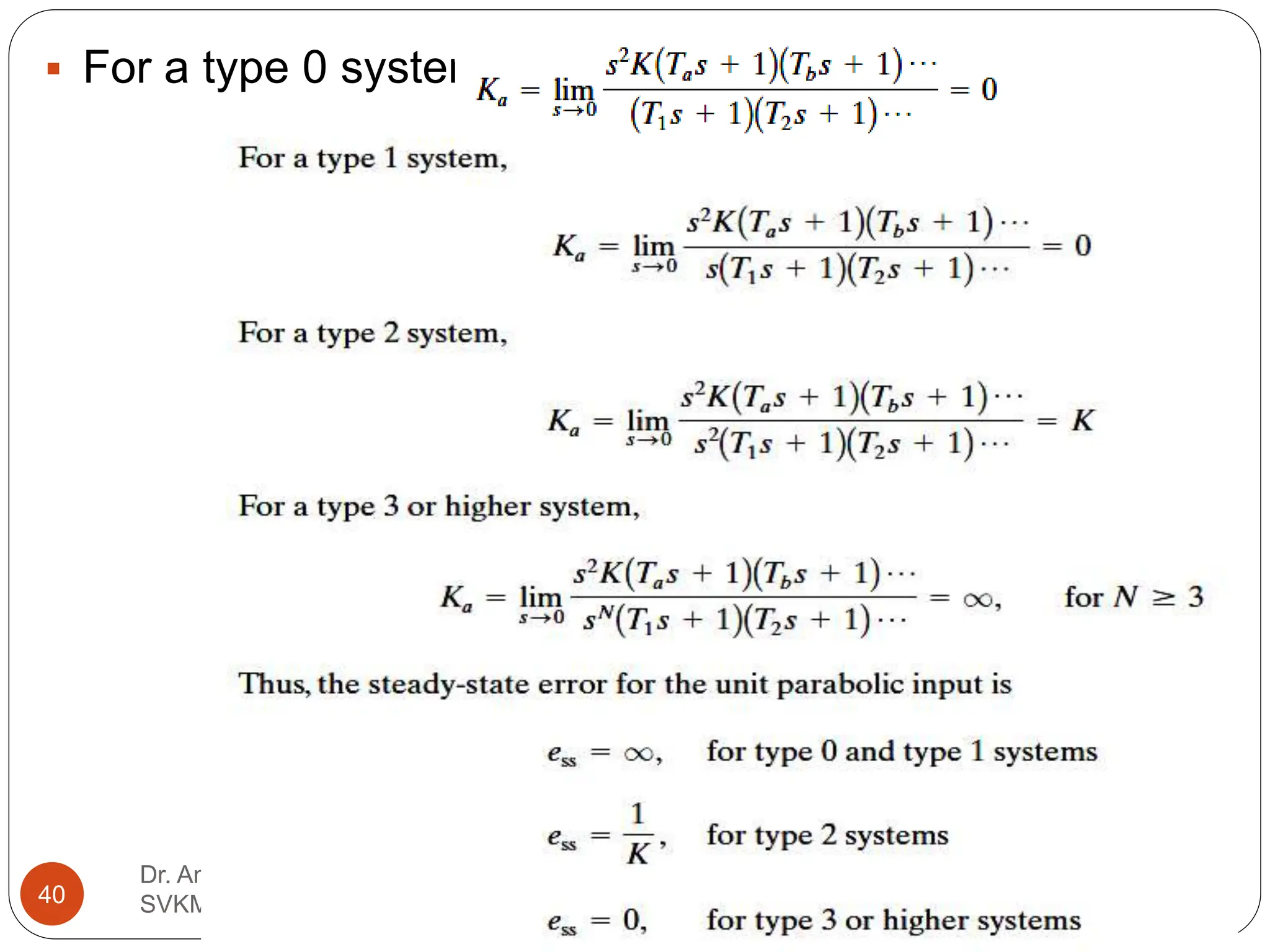
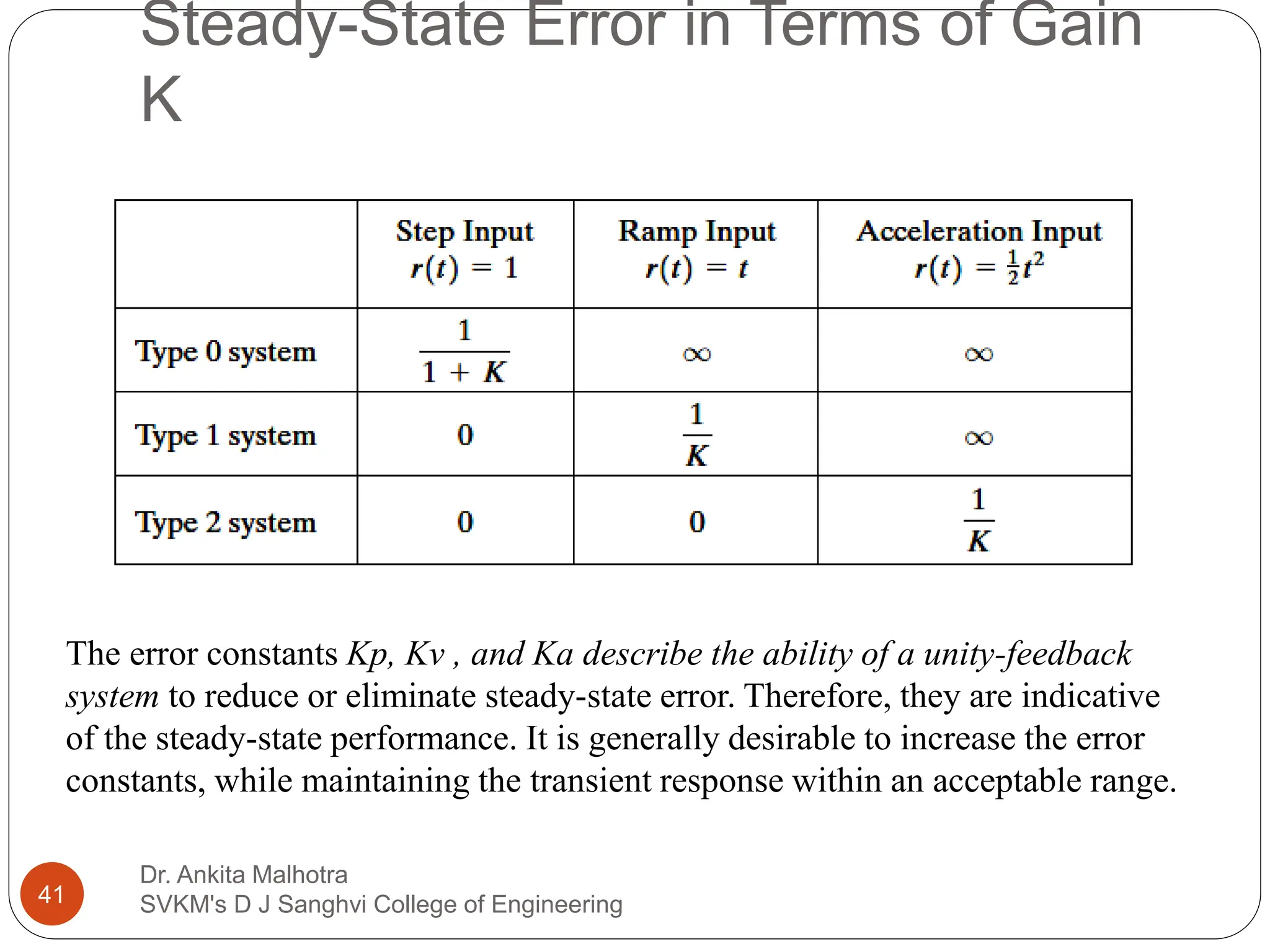
The document discusses the response characteristics of control systems, emphasizing standard test signals like step, ramp, impulse, and sinusoidal functions to analyze performance. It covers transient and steady-state responses, detailing first and second-order systems' behaviors to various inputs, along with specifications for transient response characteristics, like delay time and maximum overshoot. The document also describes the importance of static error constants in evaluating the steady-state error for unity feedback control systems.