Downloaded 228 times

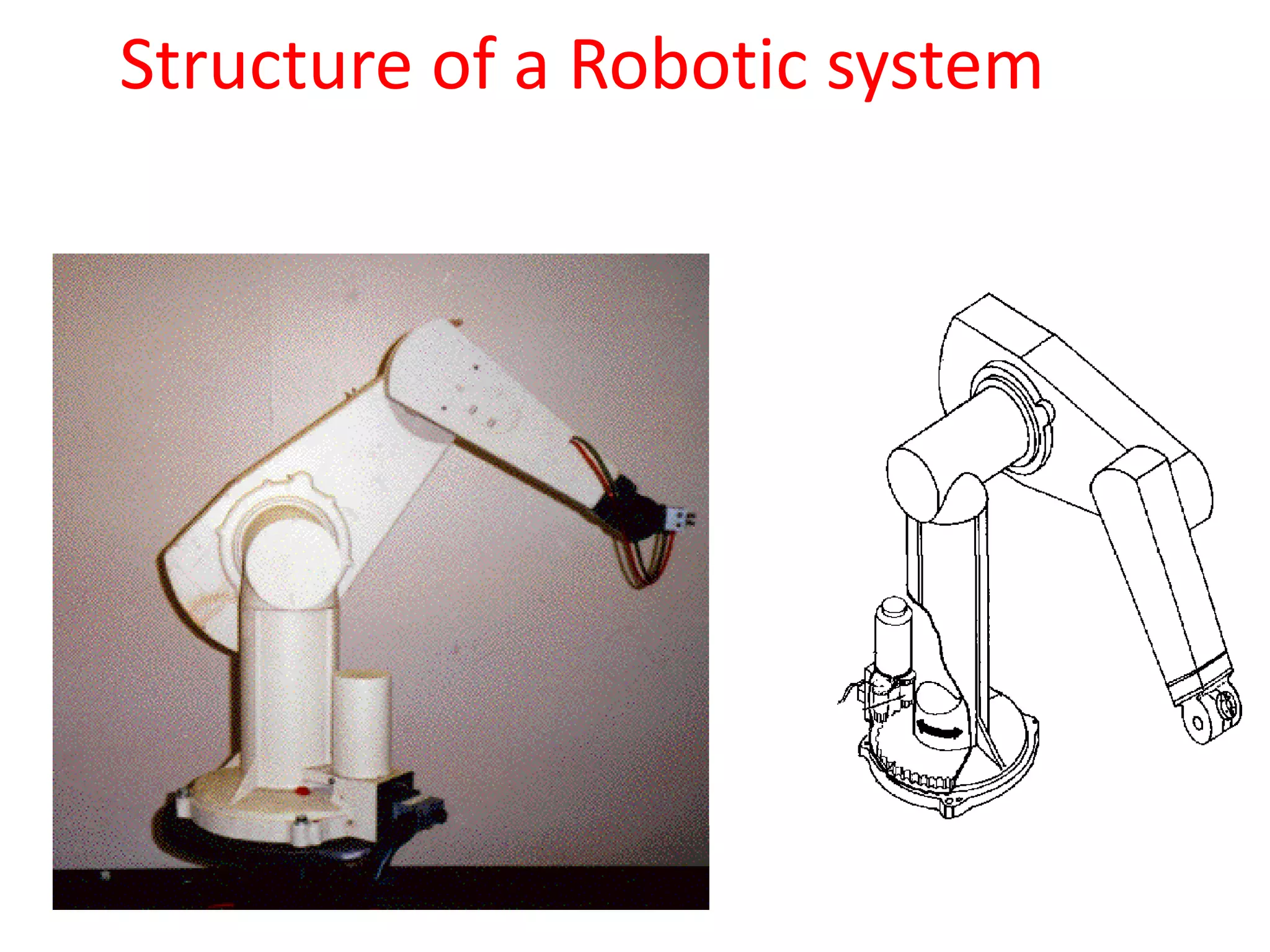
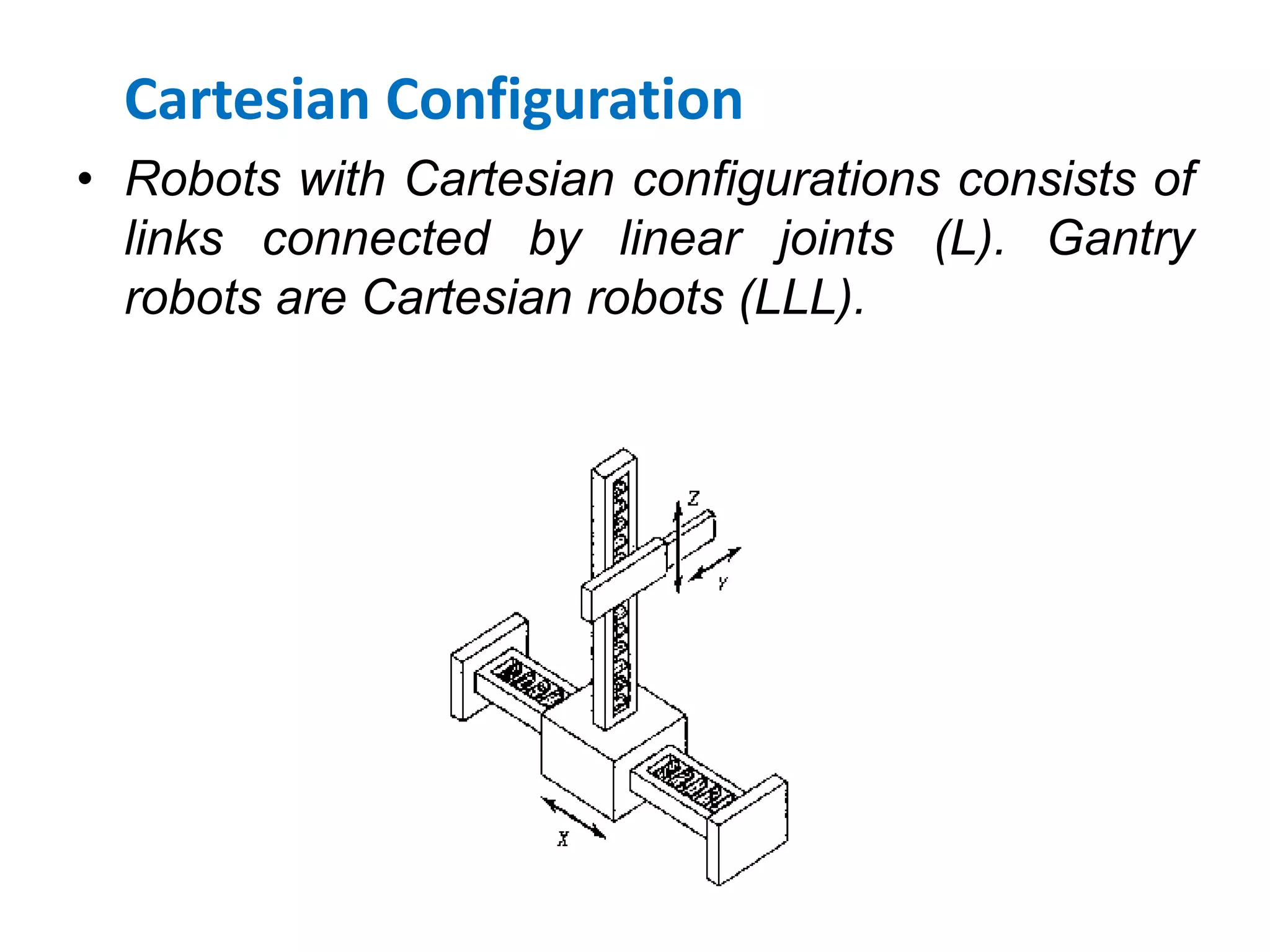
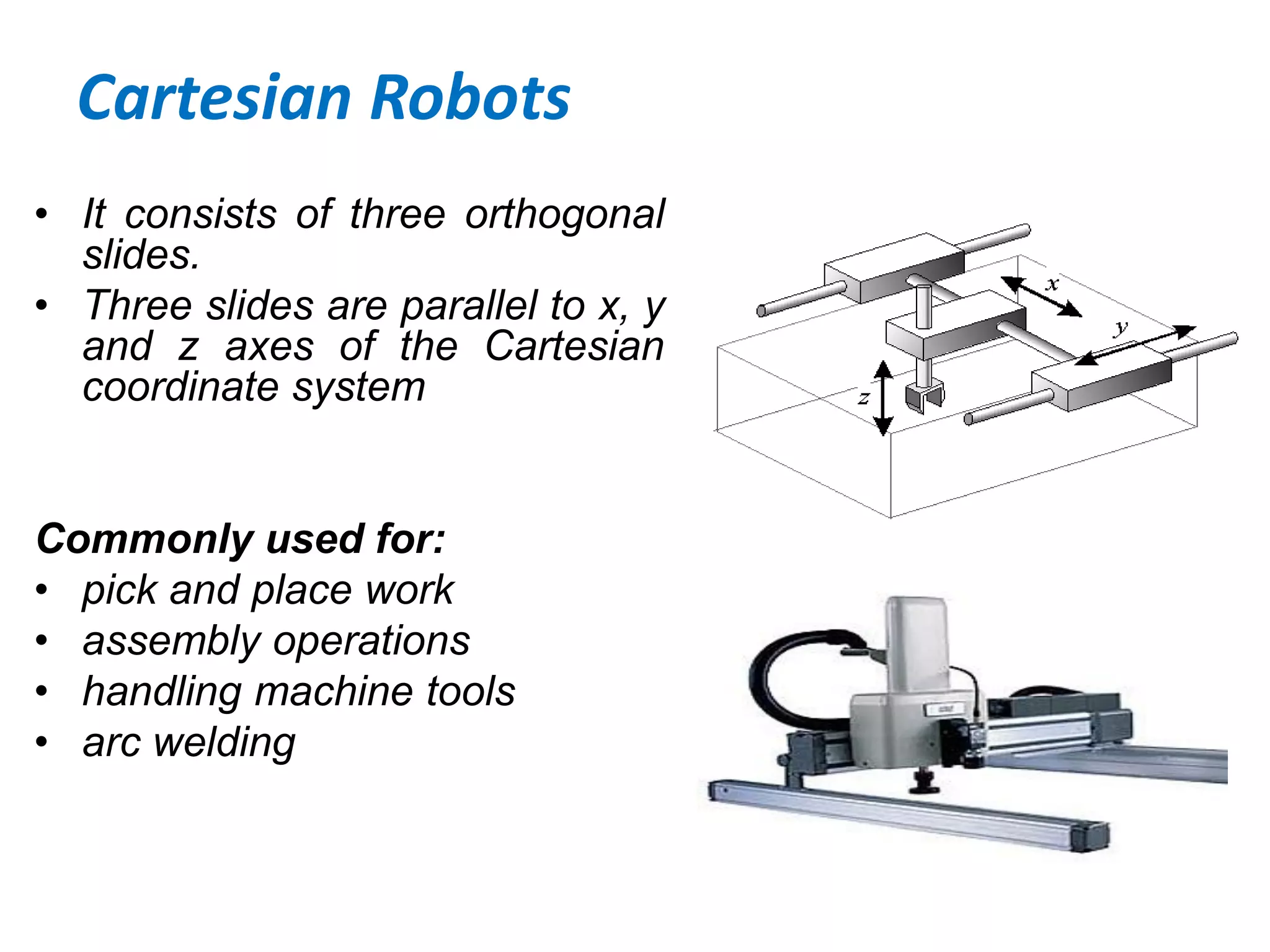
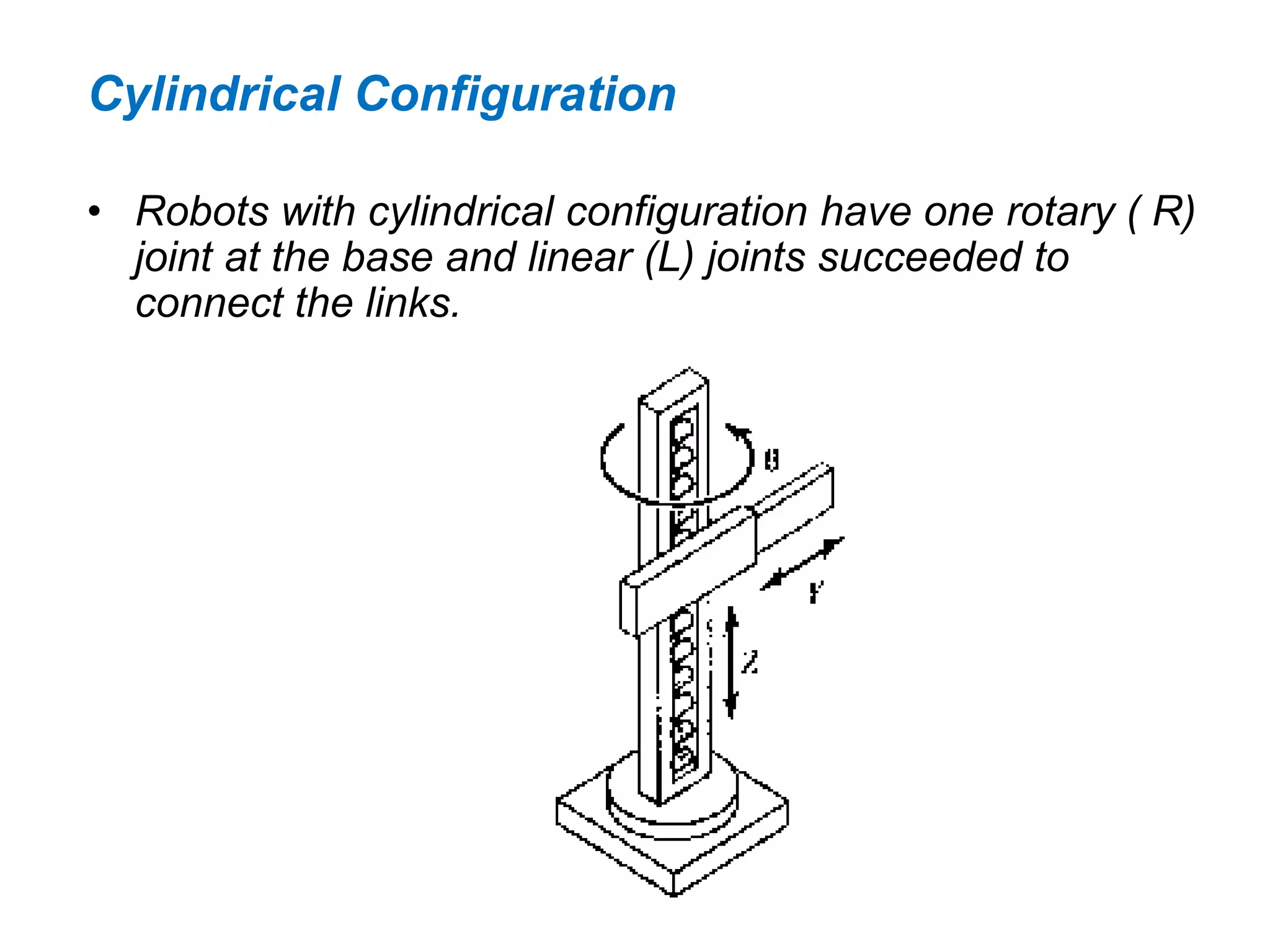
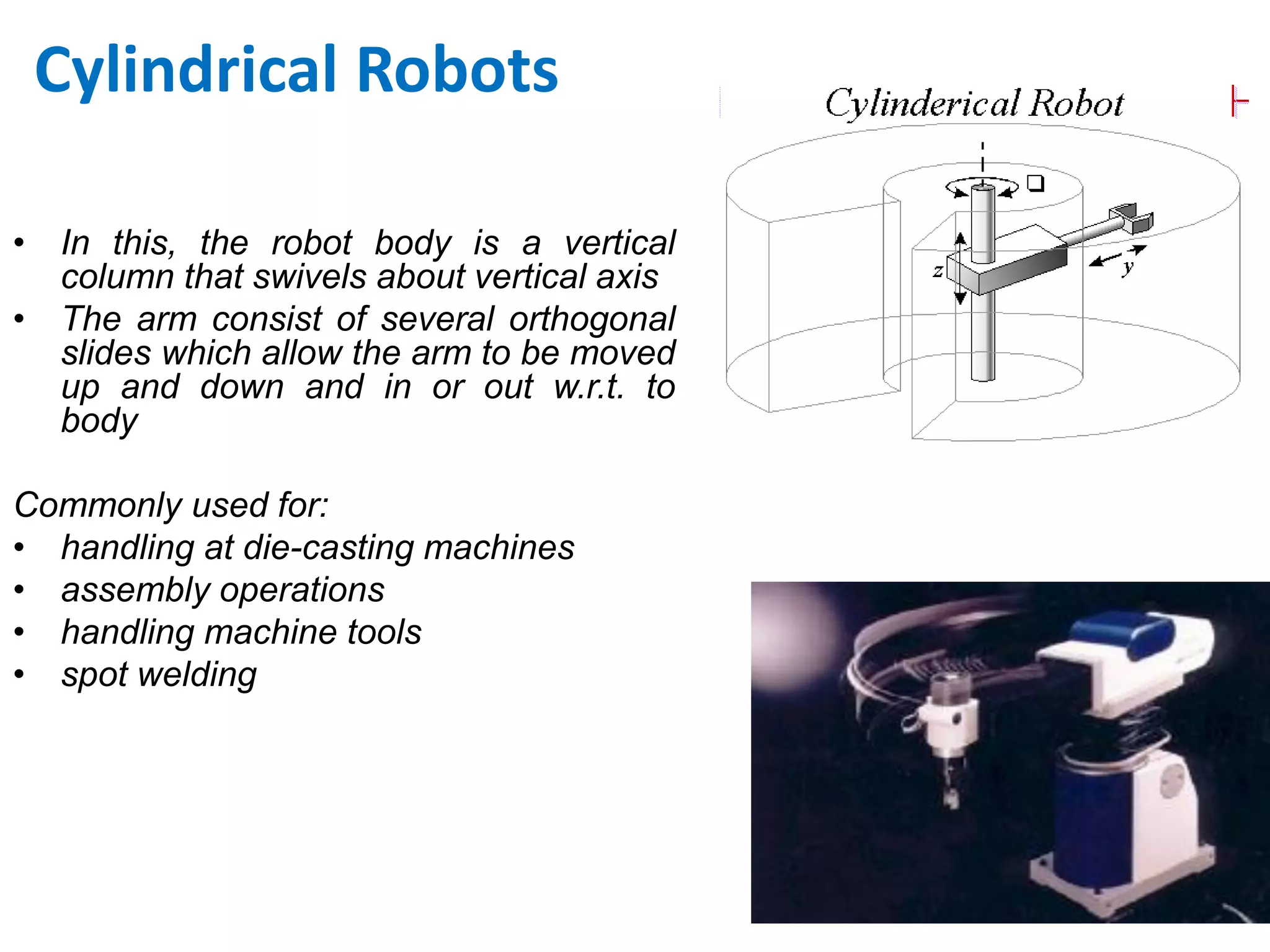
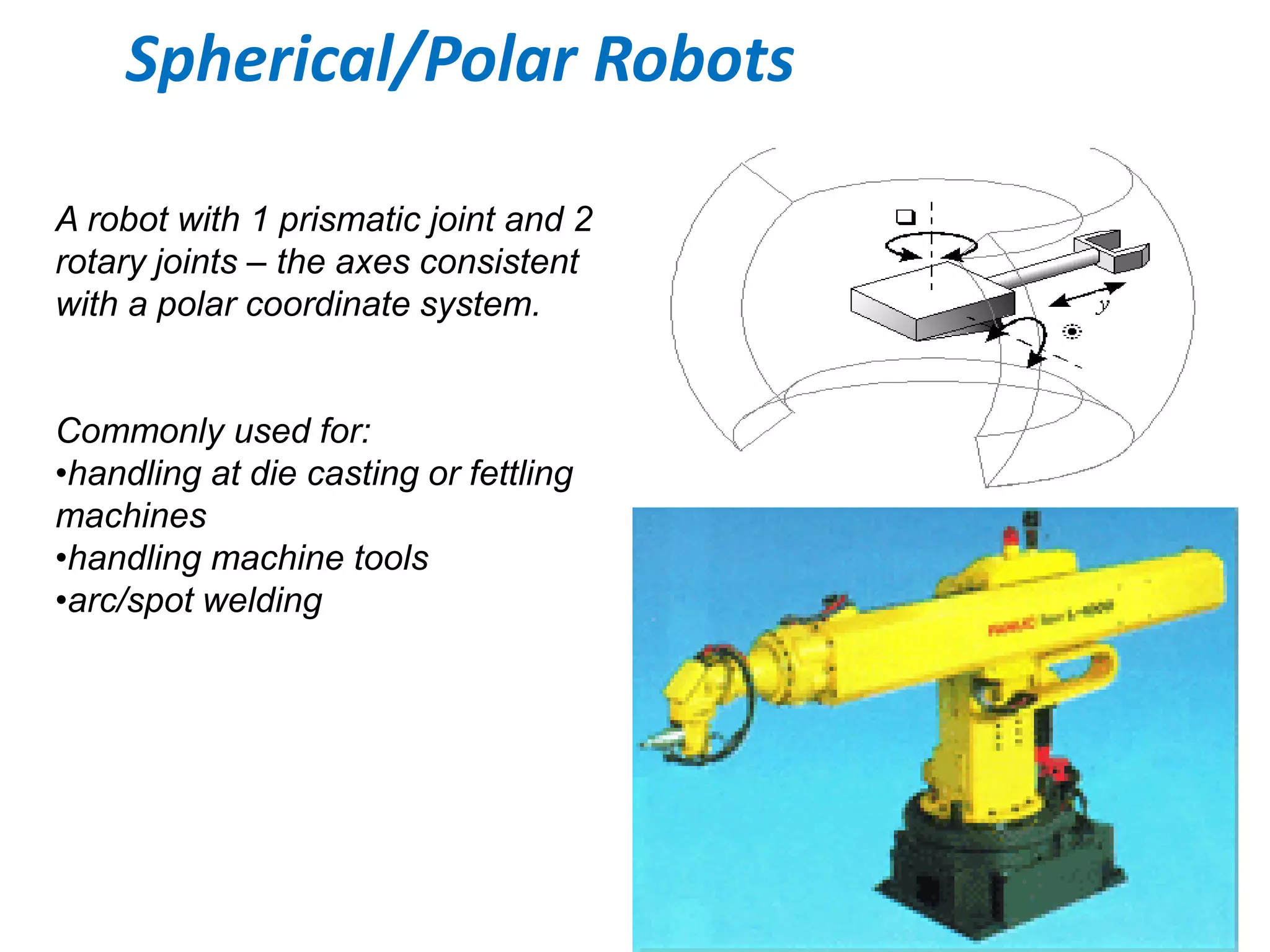
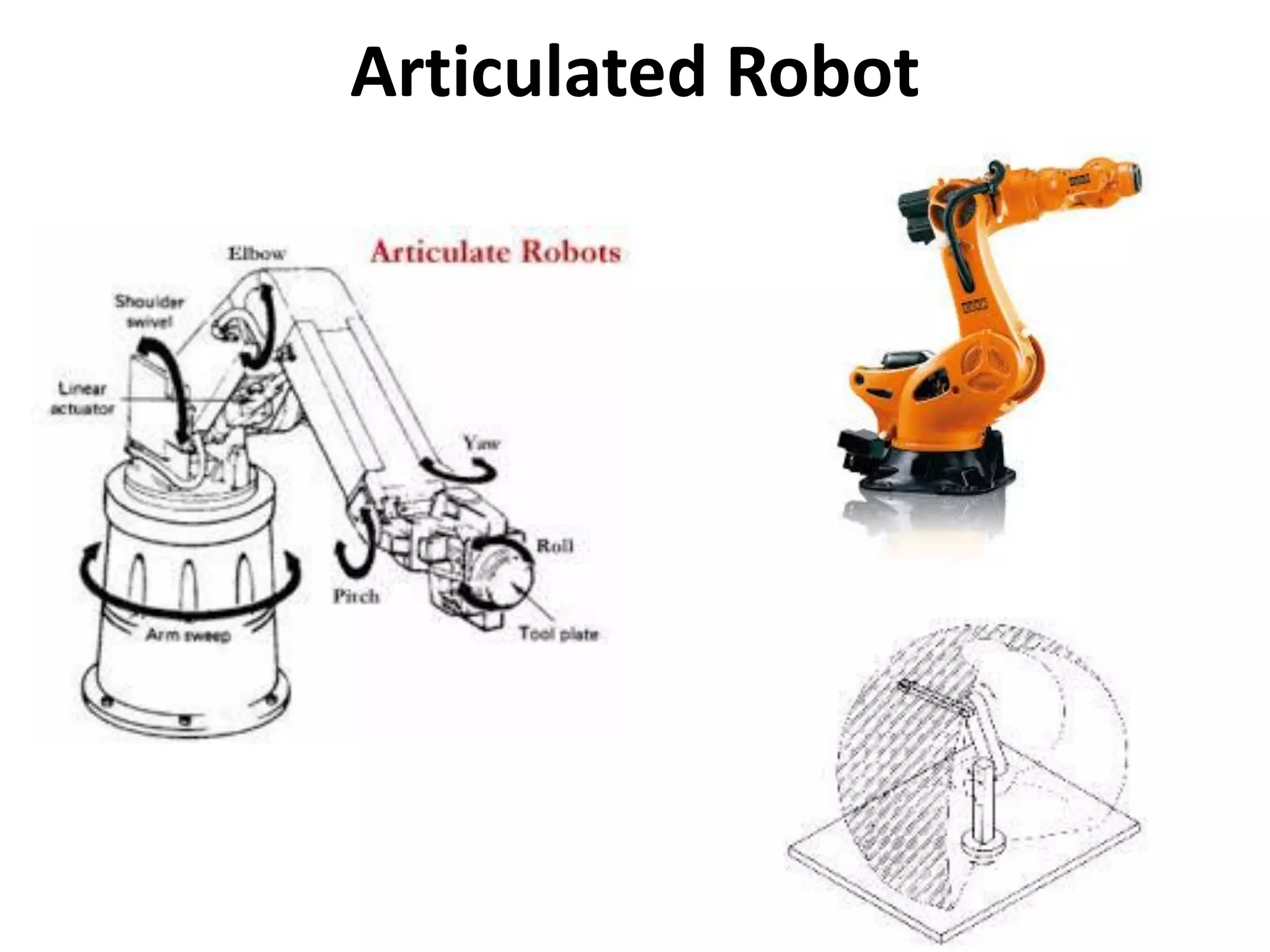
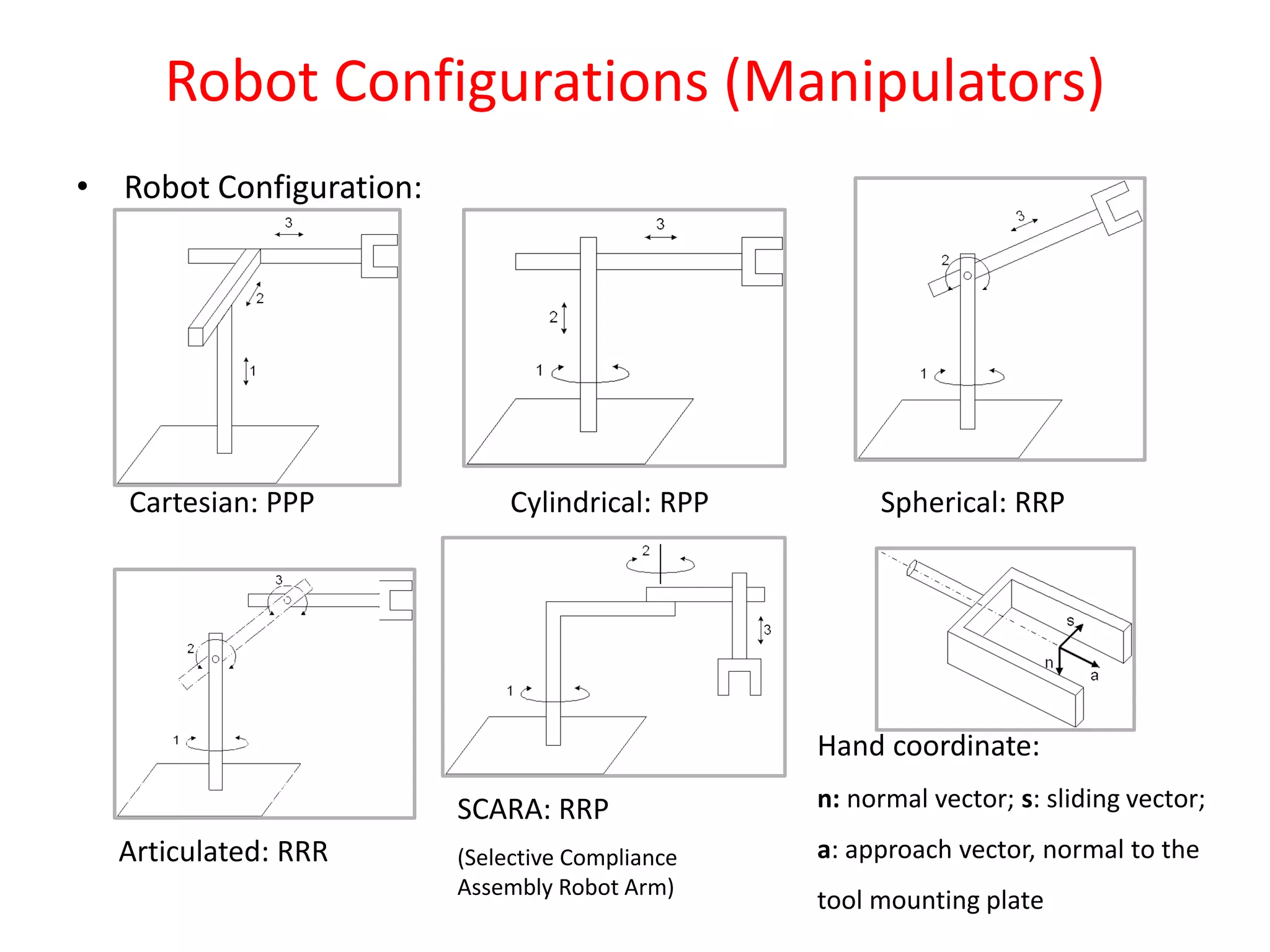
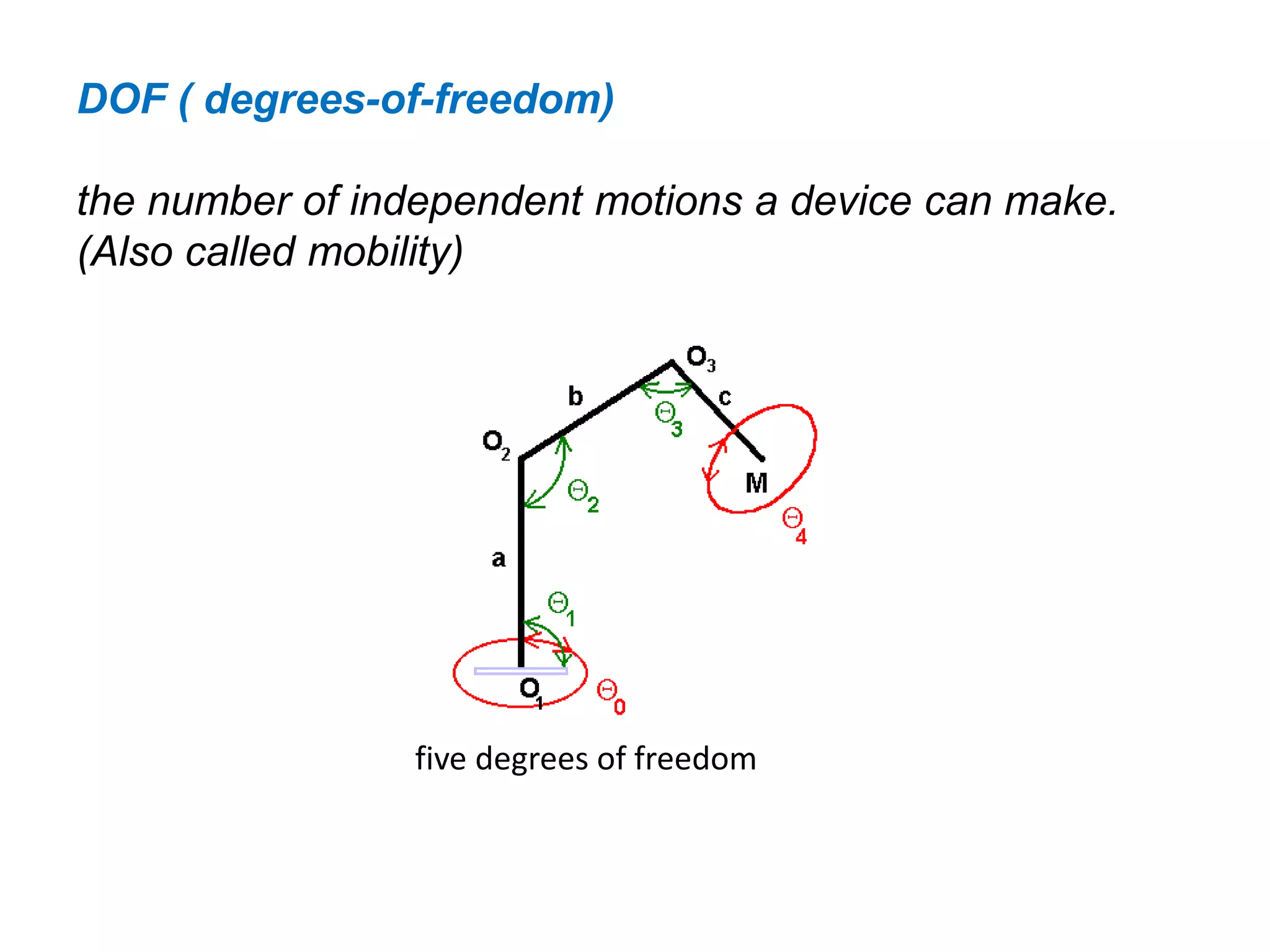
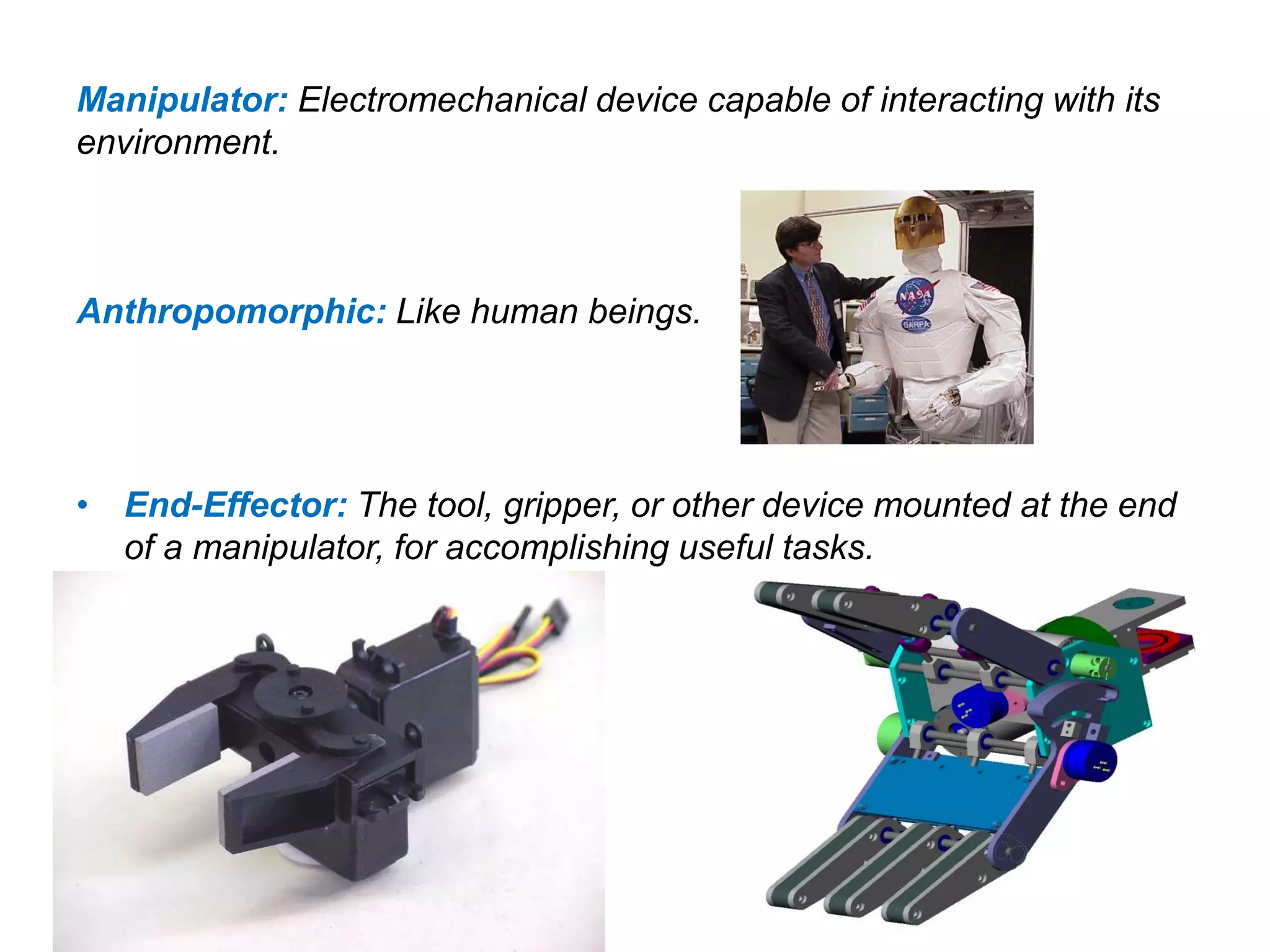
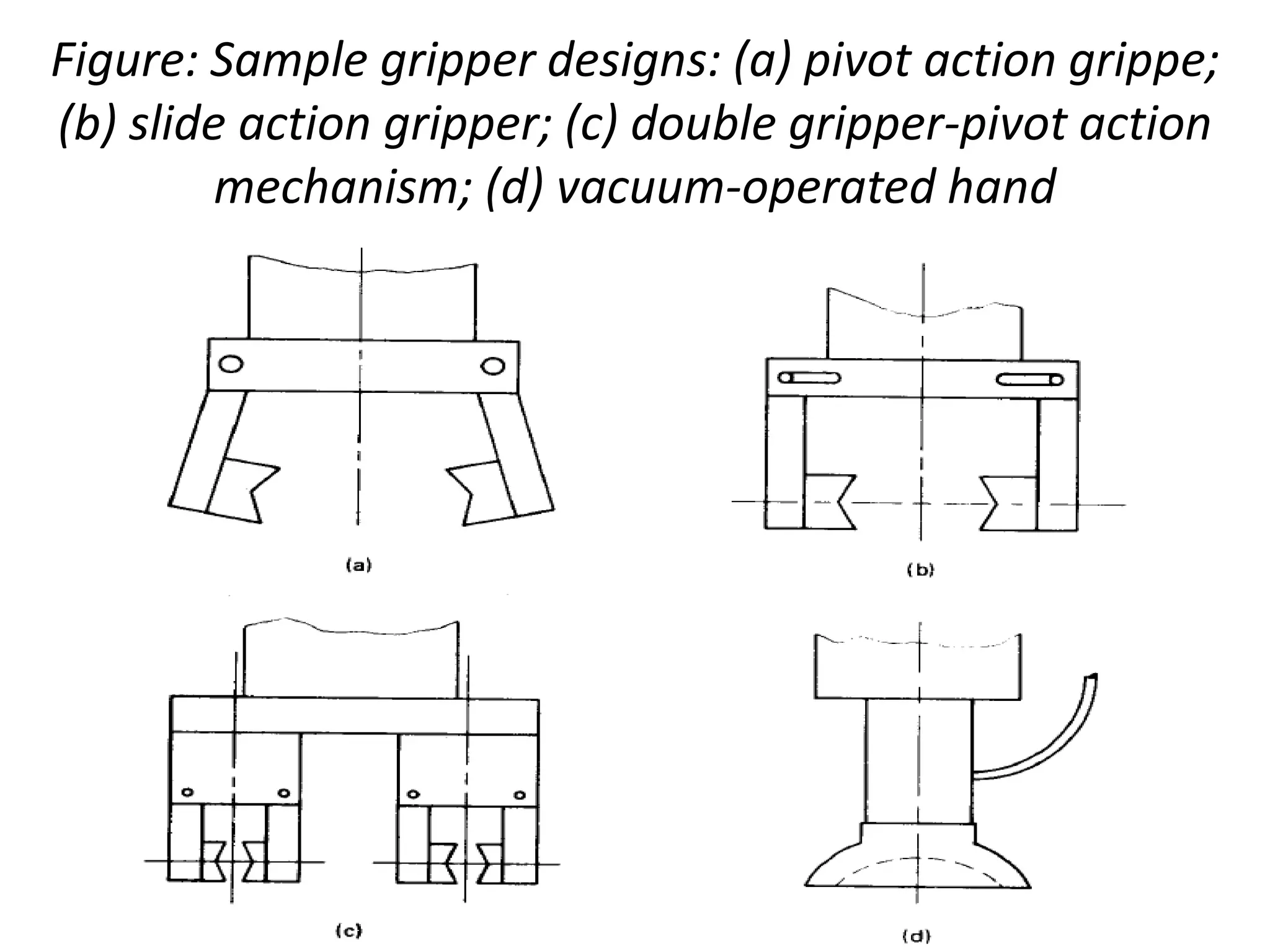
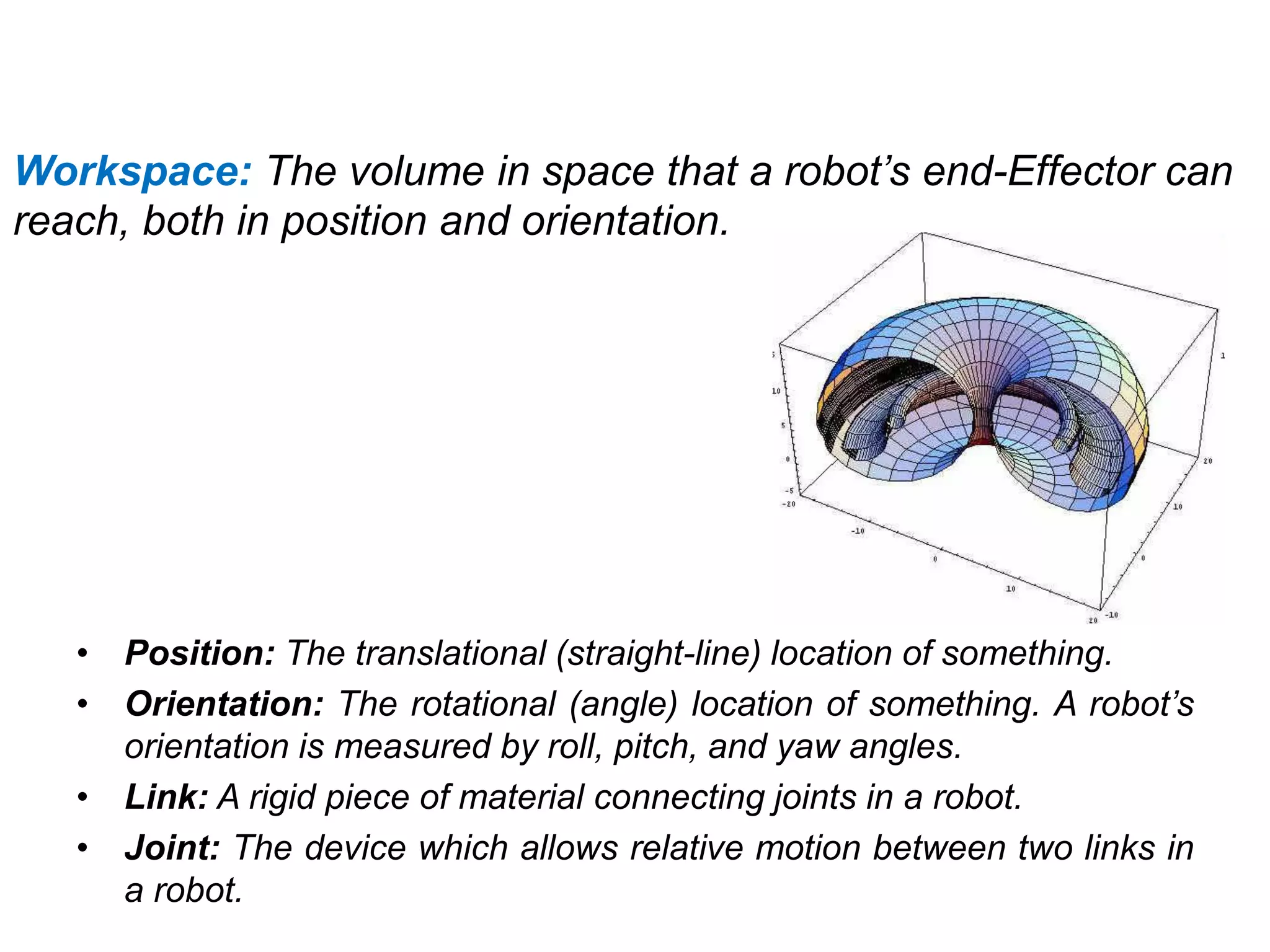
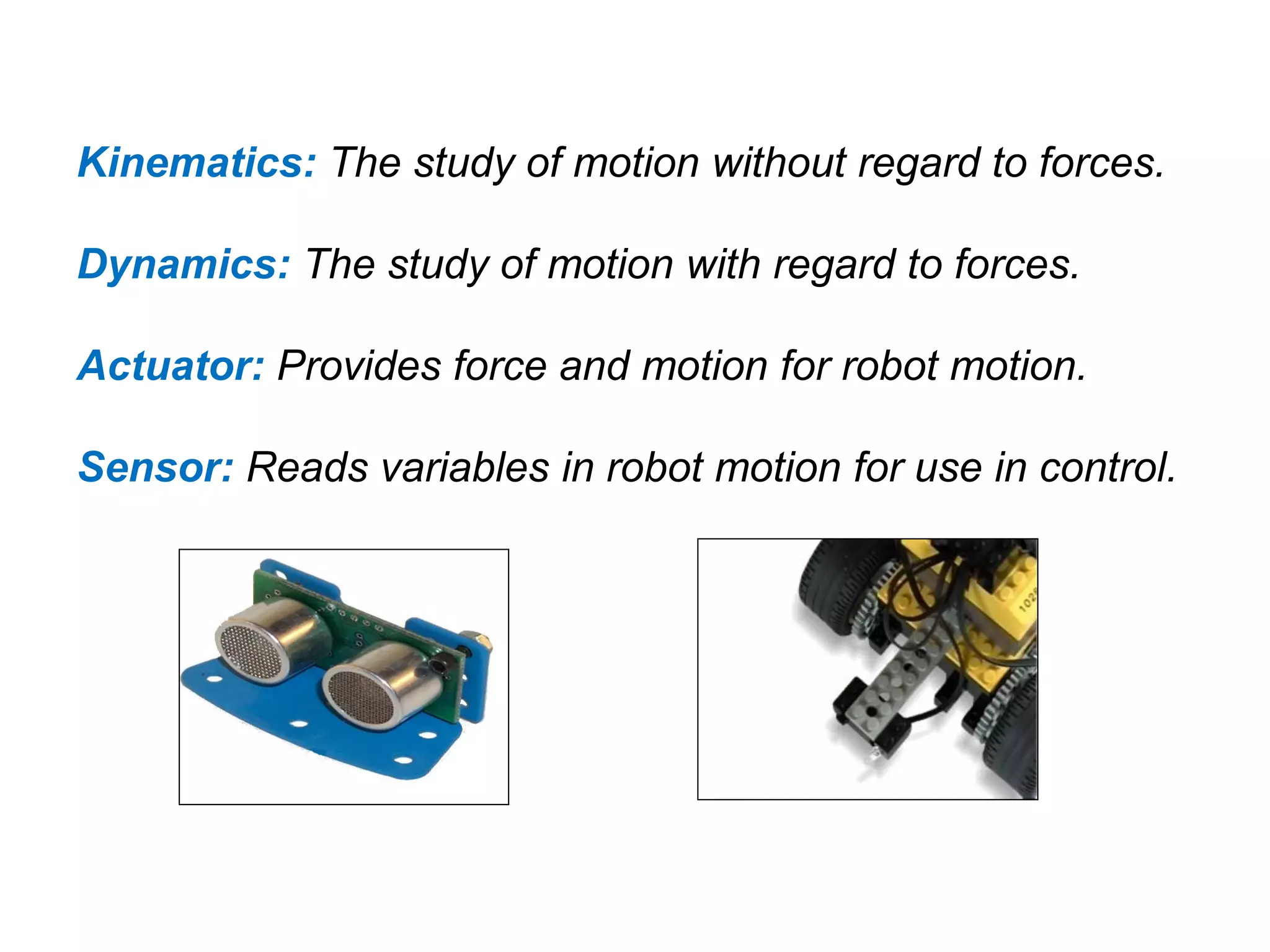
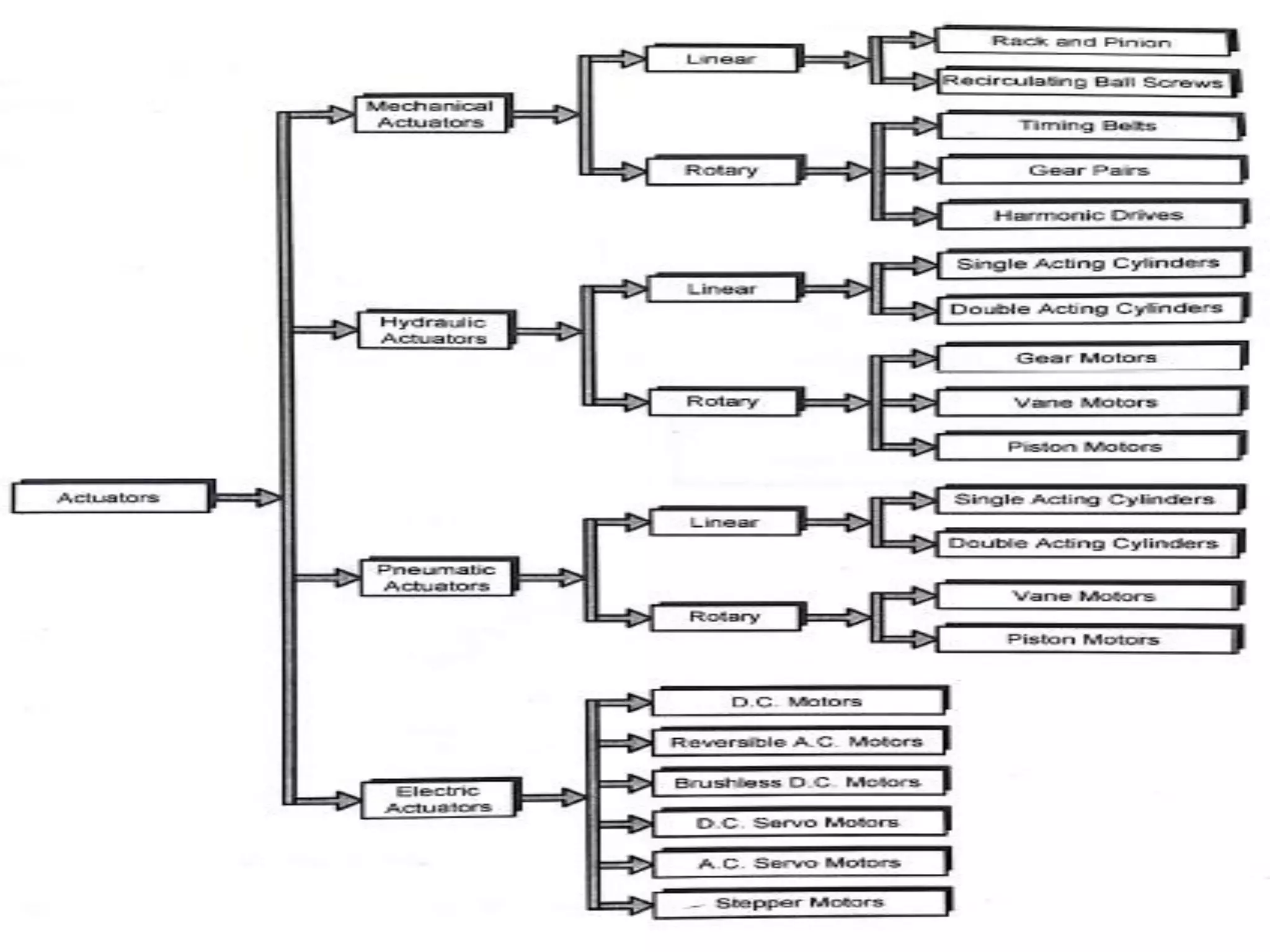


The document provides an introduction to robot technology, including definitions and terminology. It defines a robot as an electro-mechanical device with multiple degrees of freedom that is programmable to perform tasks. Industrial robots are designed to handle materials, parts, tools or devices through variable programmed motions. The study of robotics is interdisciplinary, involving mechanical, electrical, electronic and computer engineering. Robotic systems consist of manipulators, drive systems, controls, end effectors, sensors and software. Different robot configurations include Cartesian, cylindrical, spherical and articulated designs. Selection of robots depends on factors like size, degrees of freedom, velocity, precision and load capacity.























































































