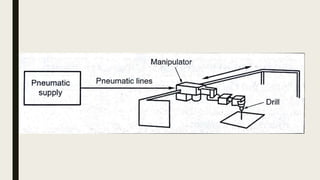
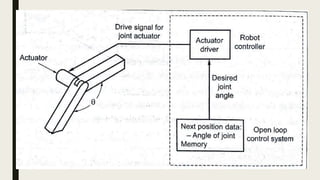
The document provides information on industrial robotics, including definitions of robots, their basic components, types of control systems, programming methods, applications, and accuracy/repeatability. It discusses the manipulator, end-effector, power supply, and control system as the four basic robot components. It also describes point-to-point, continuous path, and computed trajectory control robots, as well as sequence, playback, and intelligent levels of robot control.