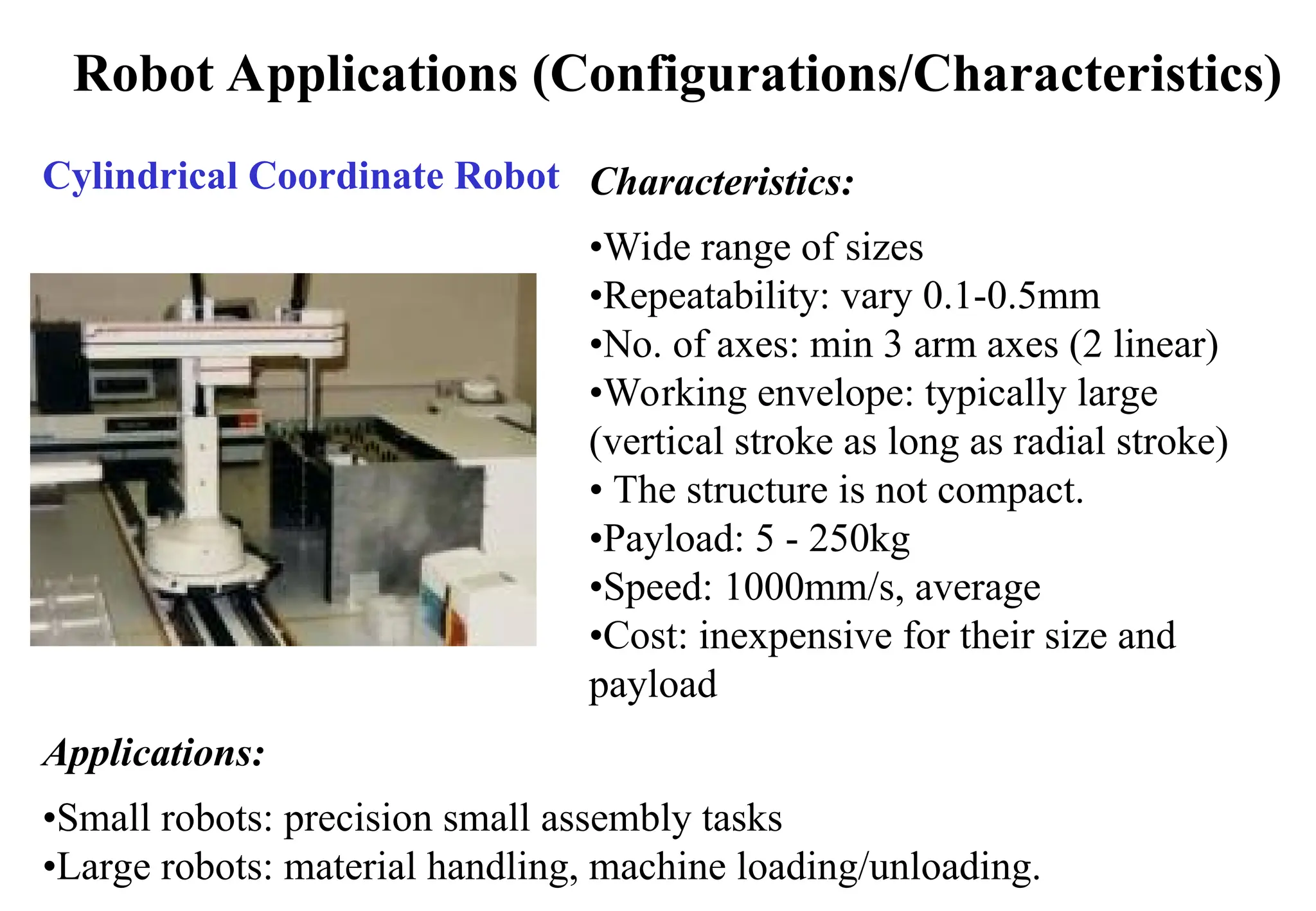
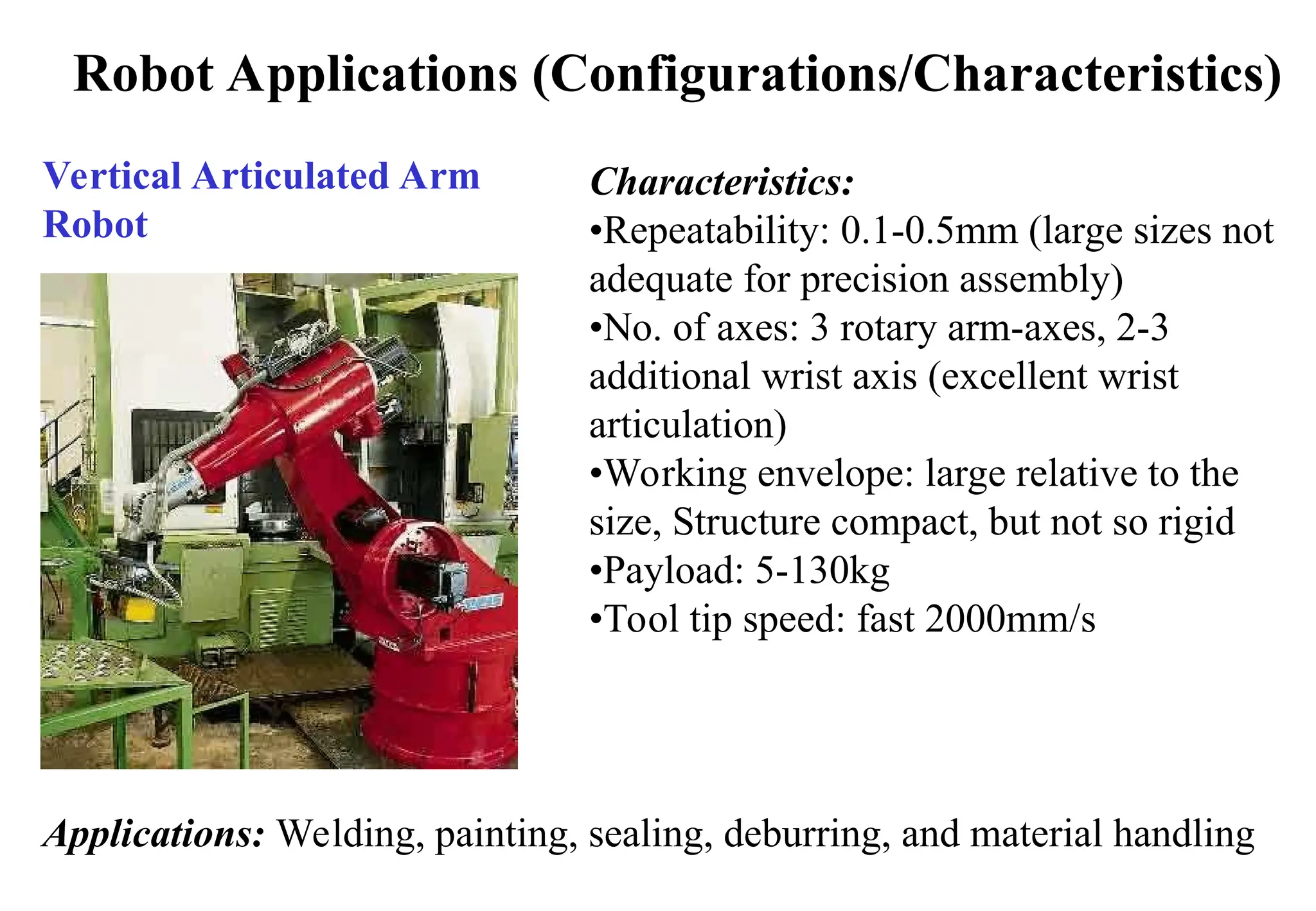
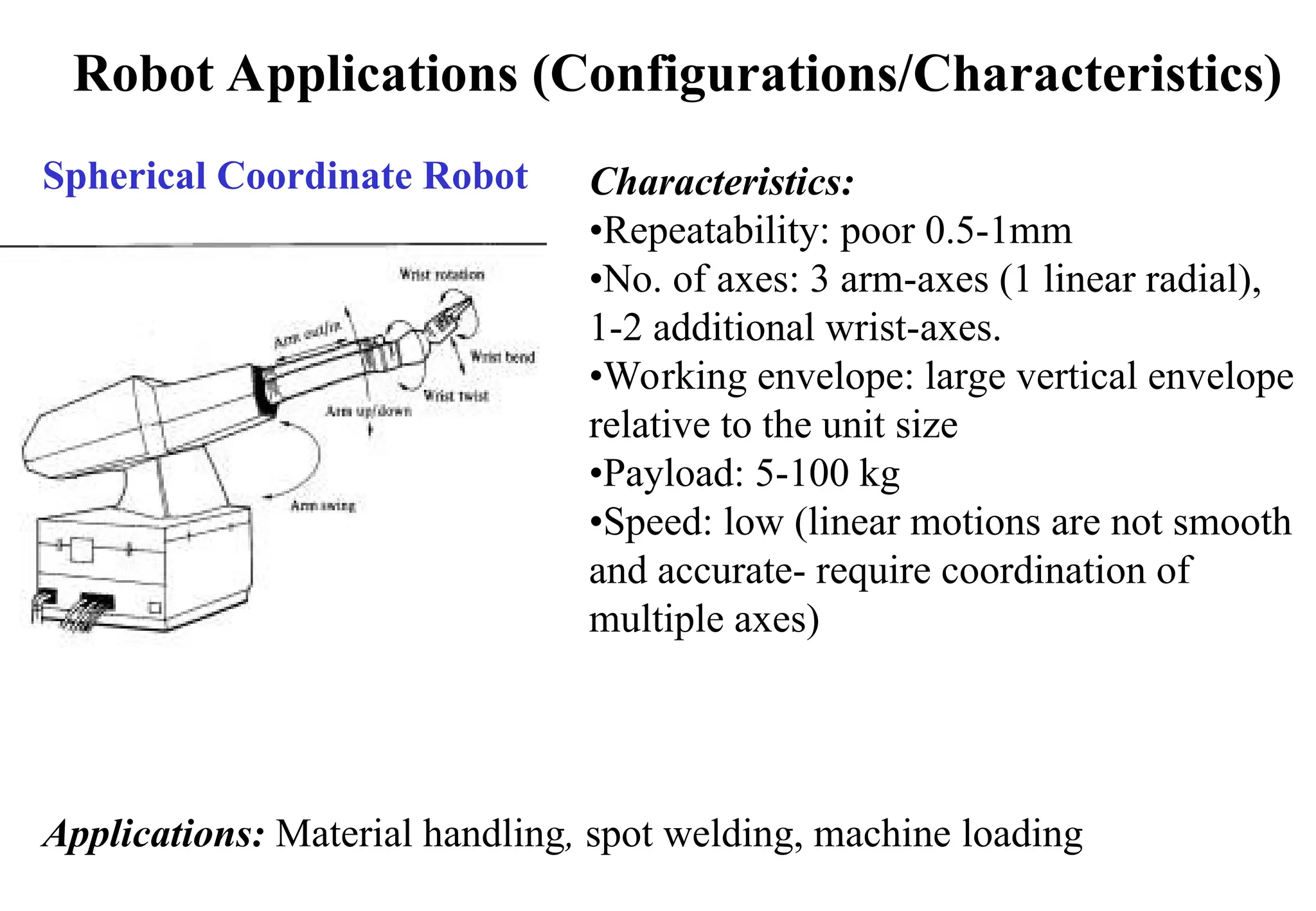
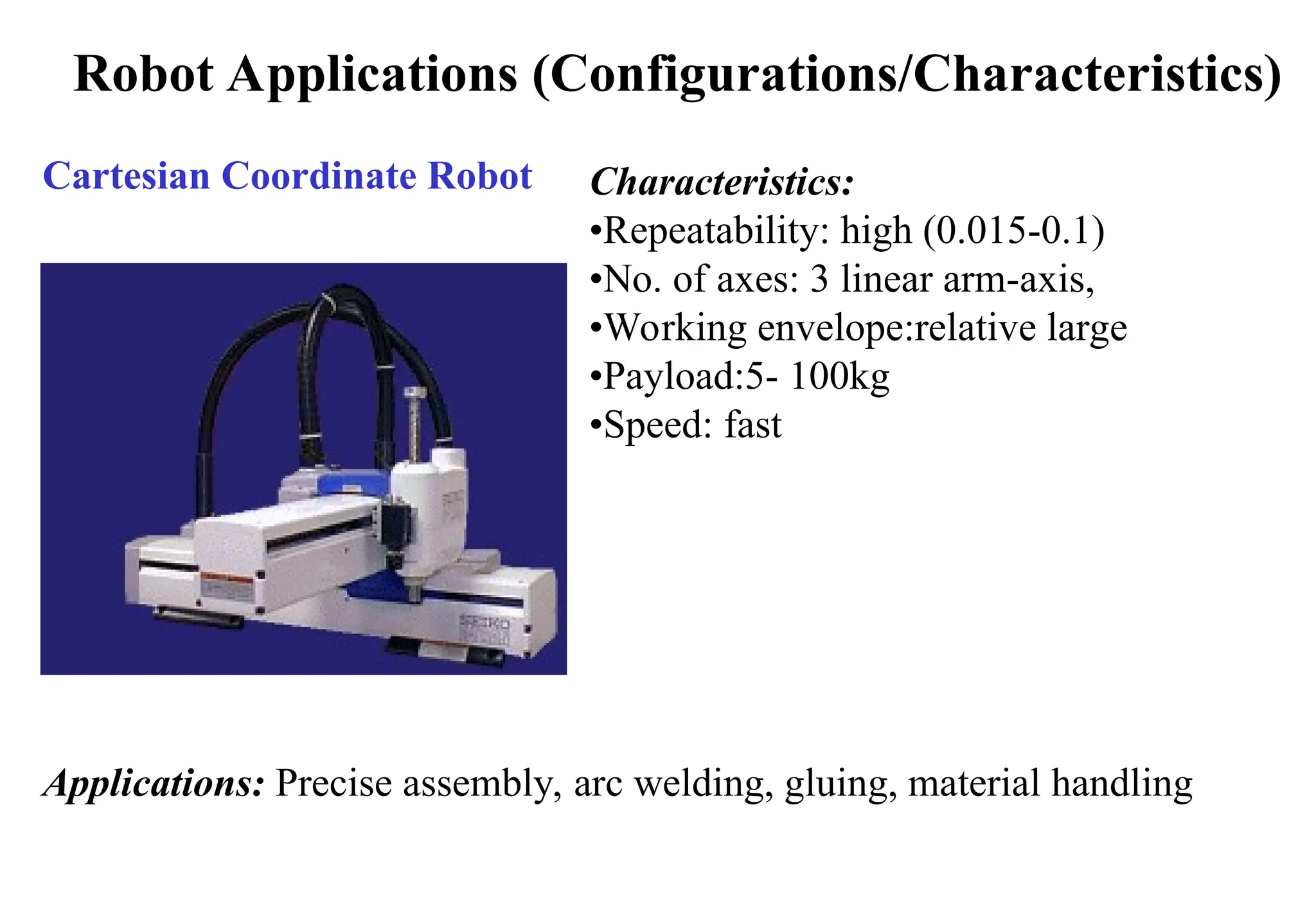
The document provides a comprehensive overview of industrial robots, detailing their definitions, components, configurations, performance specifications, and various applications. It discusses the advantages of using robots, such as improved safety, efficiency, reliability, and cost-effectiveness, while also highlighting the importance of sensors and control mechanisms. Additionally, the document compares fixed and flexible automation in terms of their implementation planning, benefits, and drawbacks.