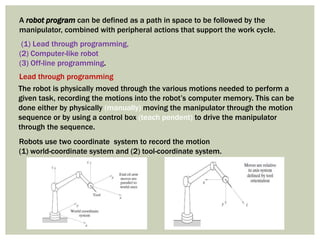
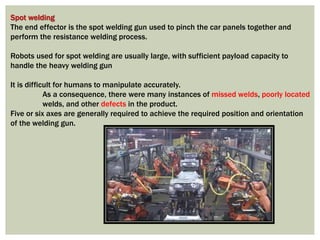
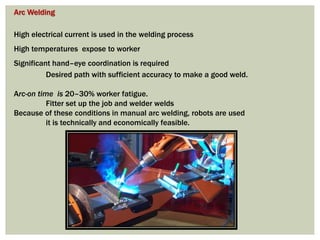
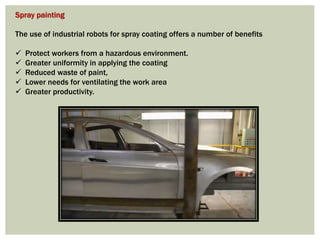
This document discusses robot programming methods, accuracy and repeatability, and applications. It covers three main robot programming methods: lead-through programming, offline programming, and computer-like programming. It also defines resolution, accuracy, and repeatability as they relate to robot positioning. Finally, it outlines several common industrial robot applications including material handling, processing operations like welding and painting, and assembly.

















































































![Attack surfaces and attack tress[inform]](https://cdn.slidesharecdn.com/ss_thumbnails/lecture03-260108015941-a4dee53b-thumbnail.jpg?width=640&height=640&fit=bounds)









