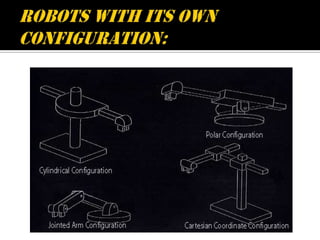
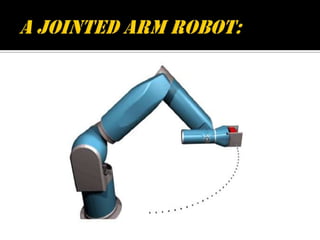
A robot is a mechanical device guided by a computer program capable of performing industrial tasks. Robots usually have a body, arm, and wrist and can use different coordinate systems like polar, cylindrical, or Cartesian. They are classified by their configuration, workspace shape, power source, and technology level. Robots vary in size and are specified by their pitch, yaw, roll, joint notation, speed, and payload.