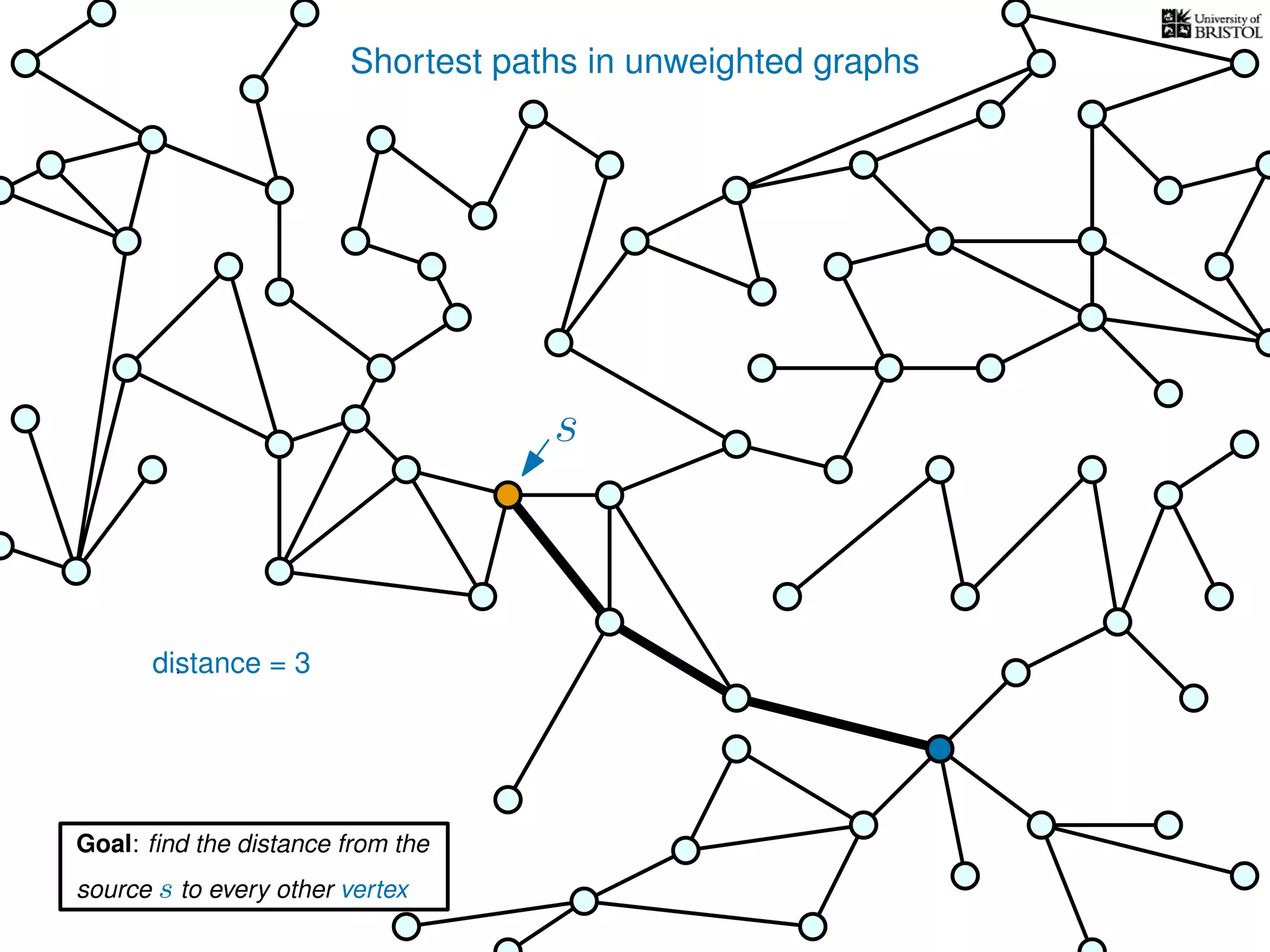
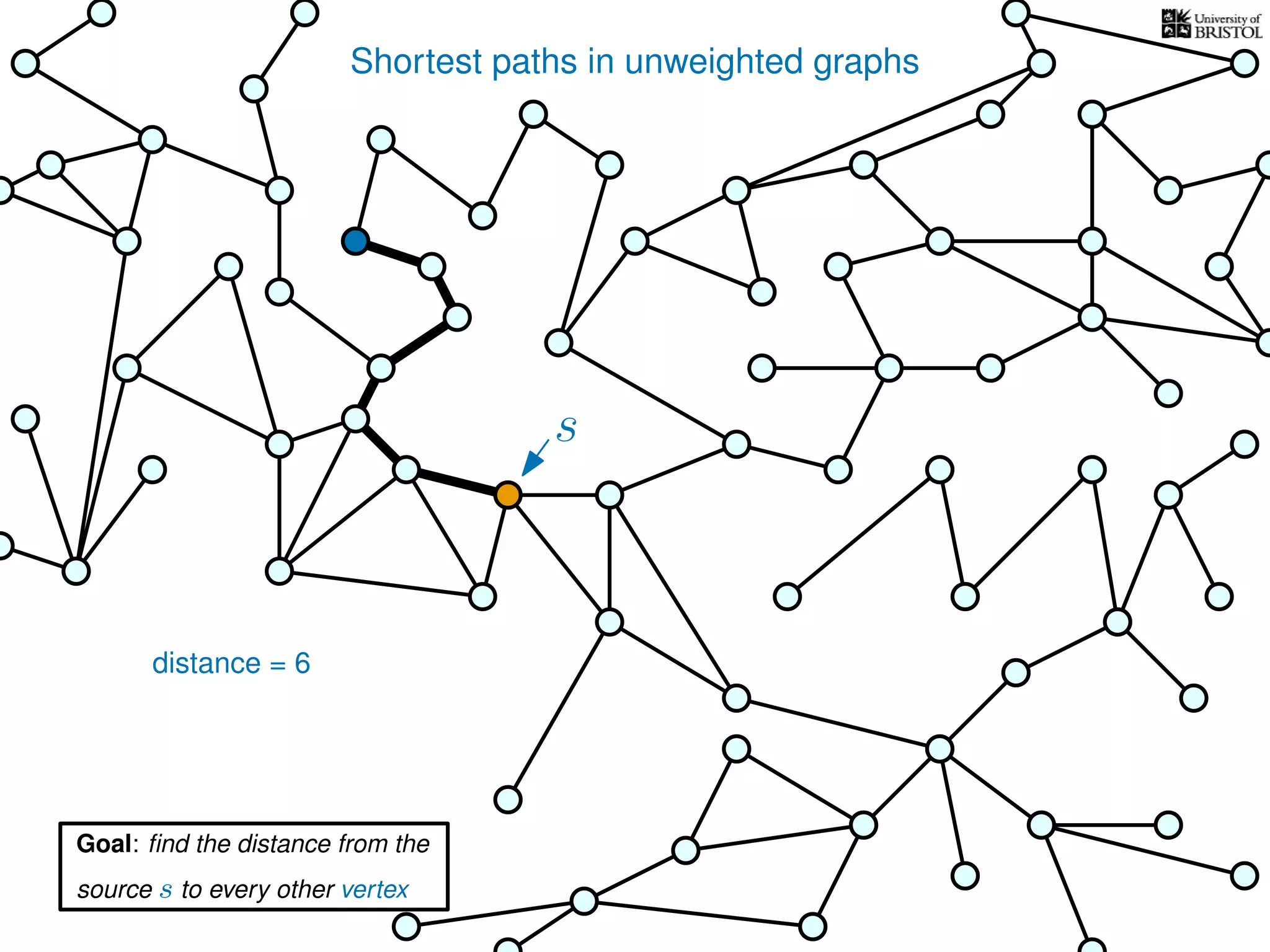
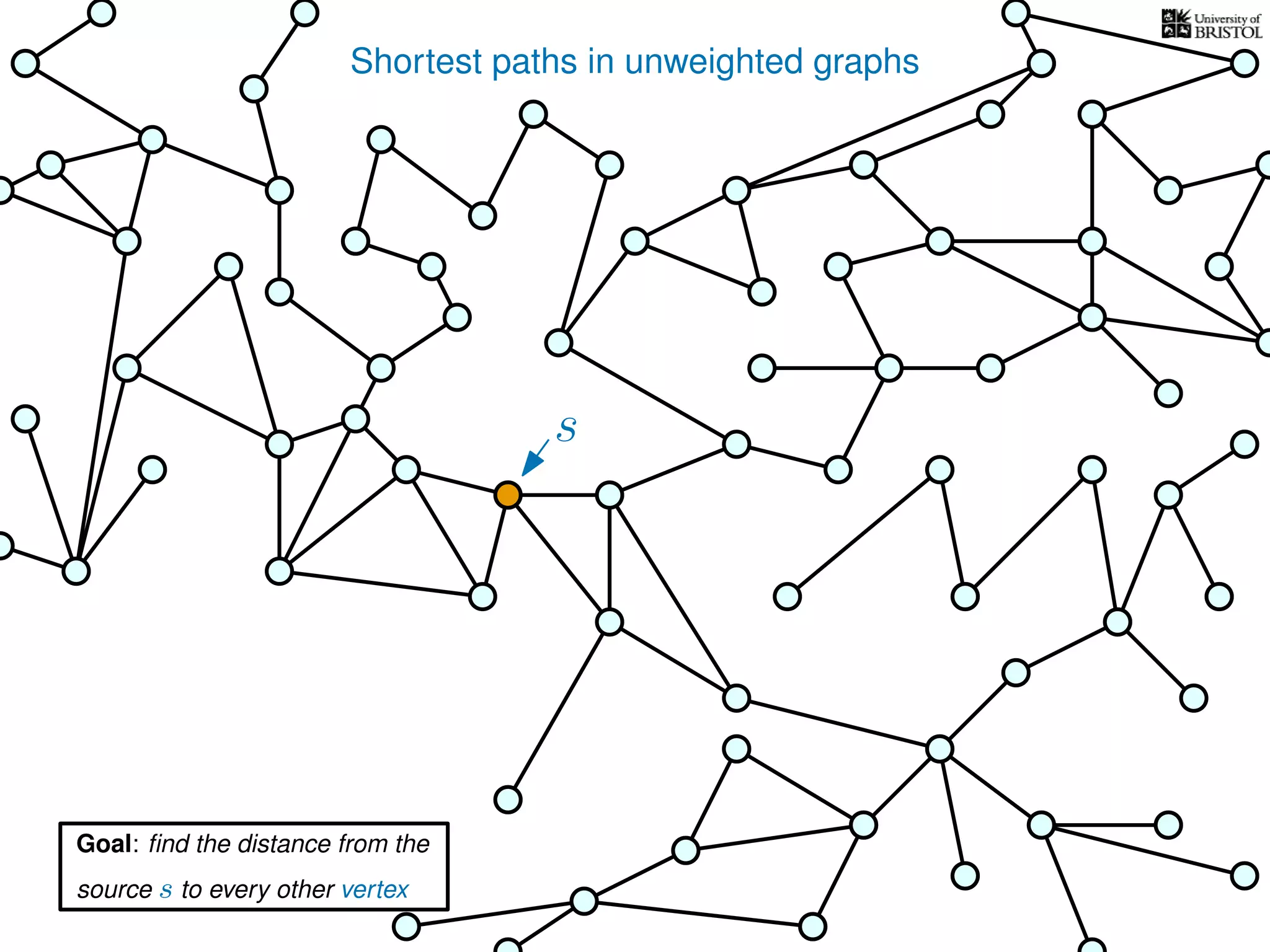
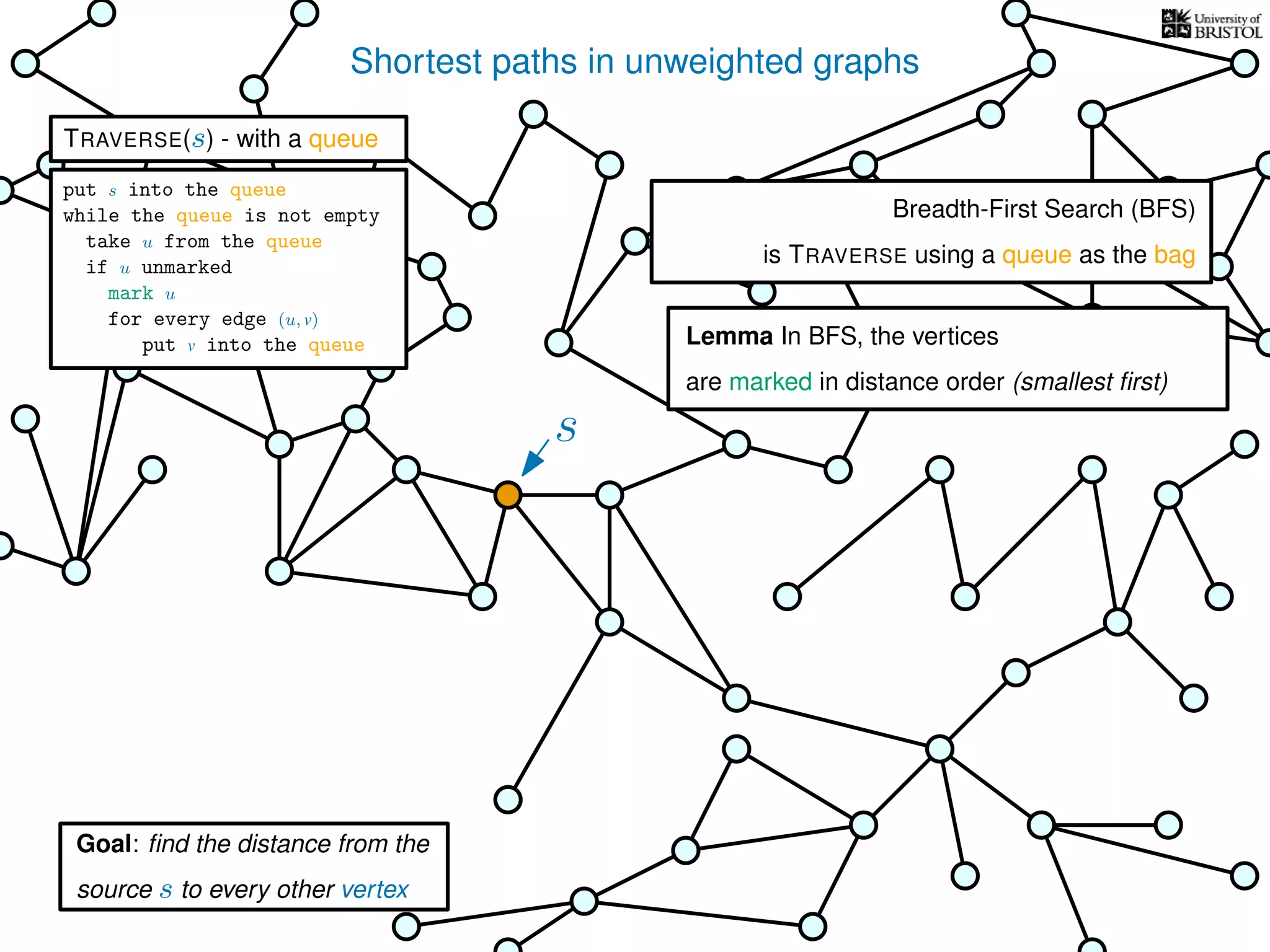
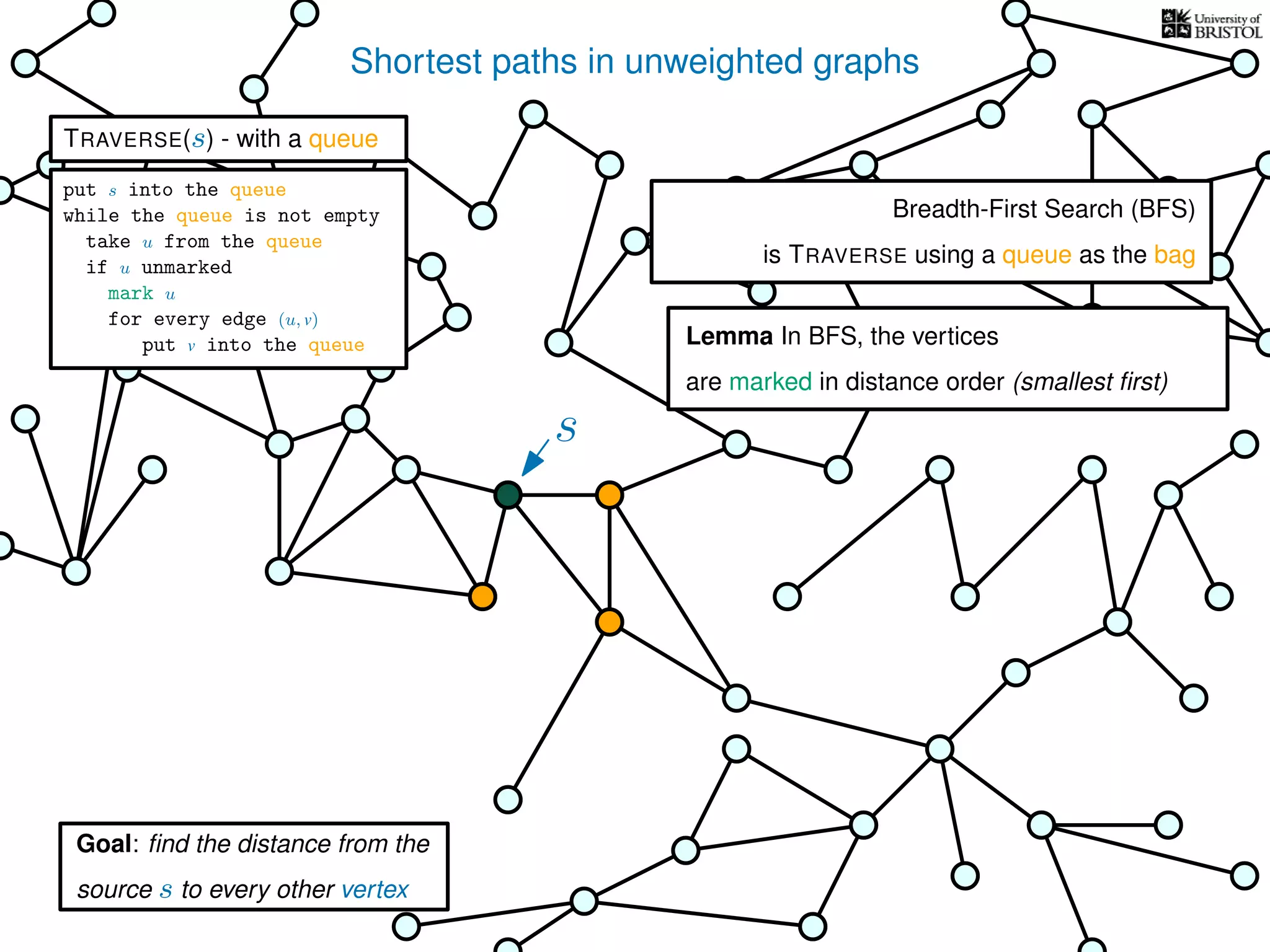
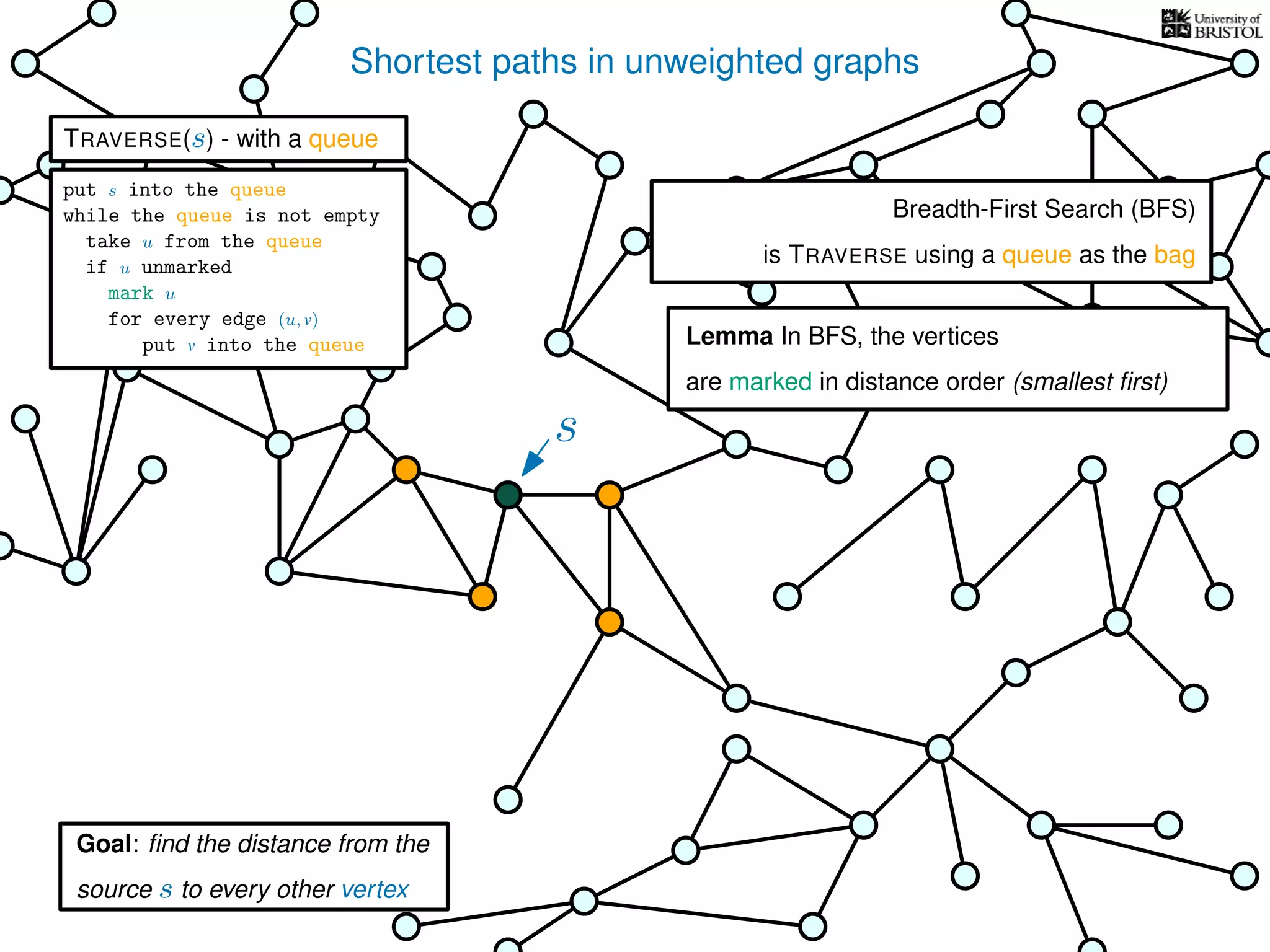
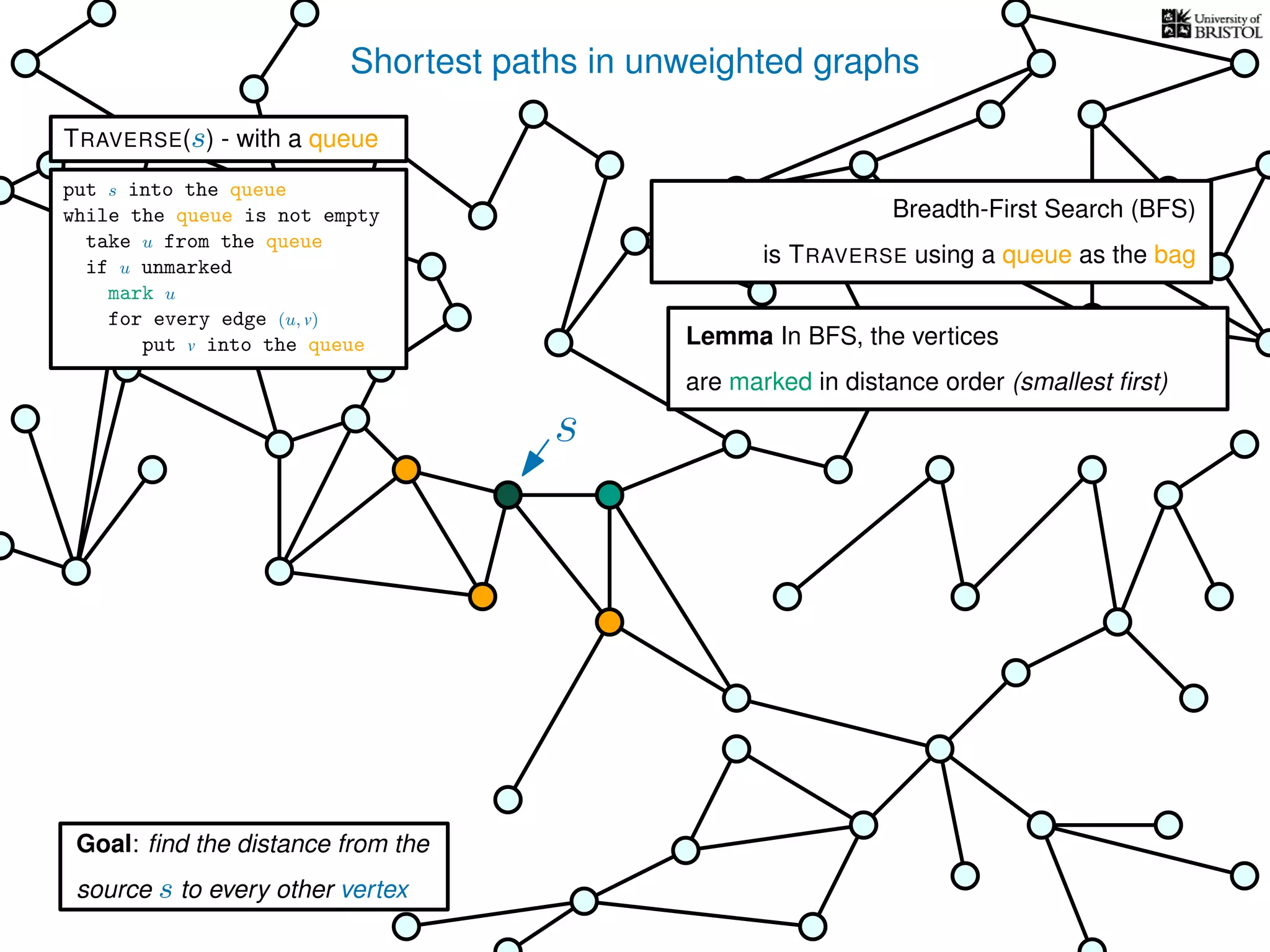
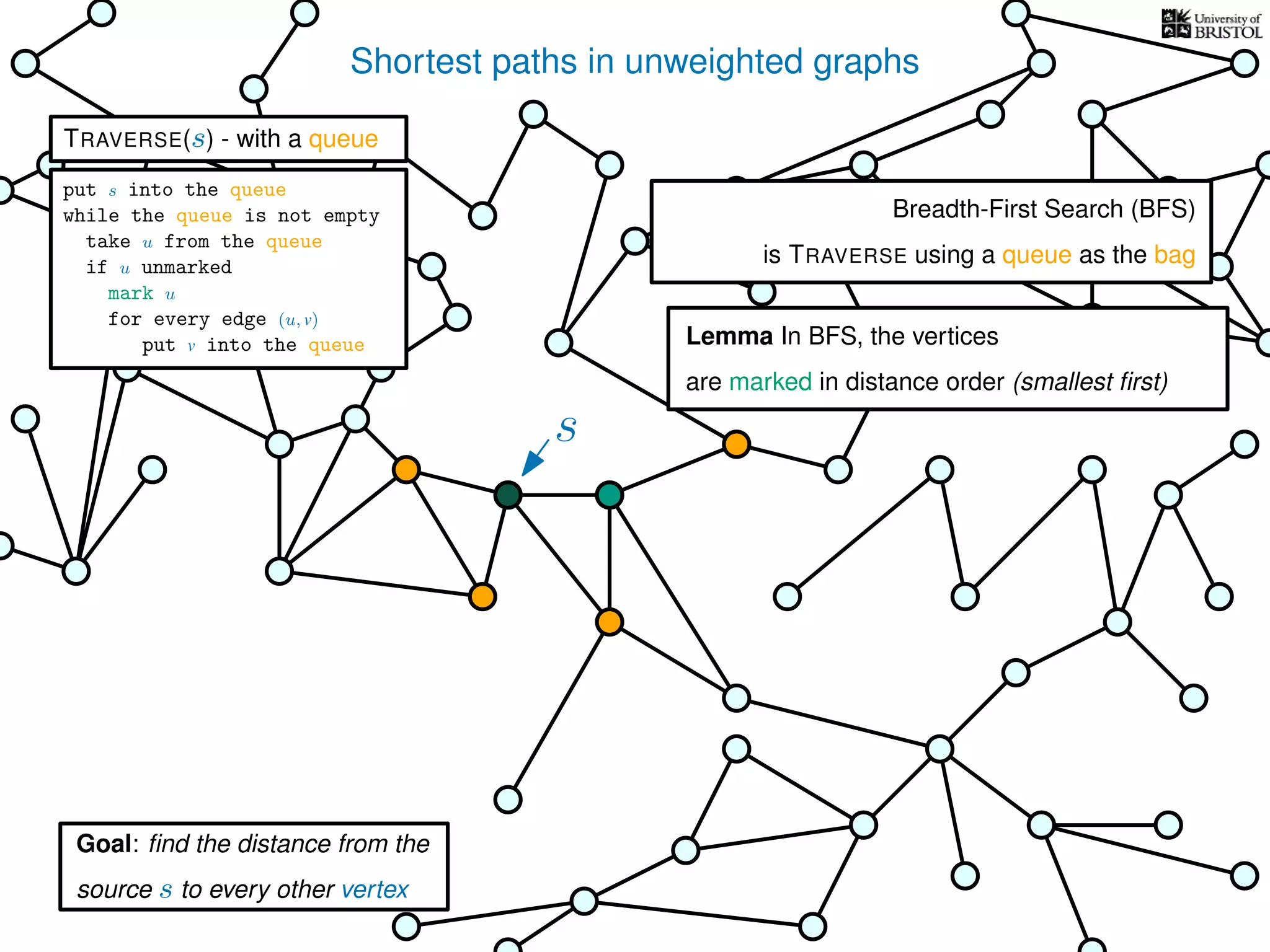
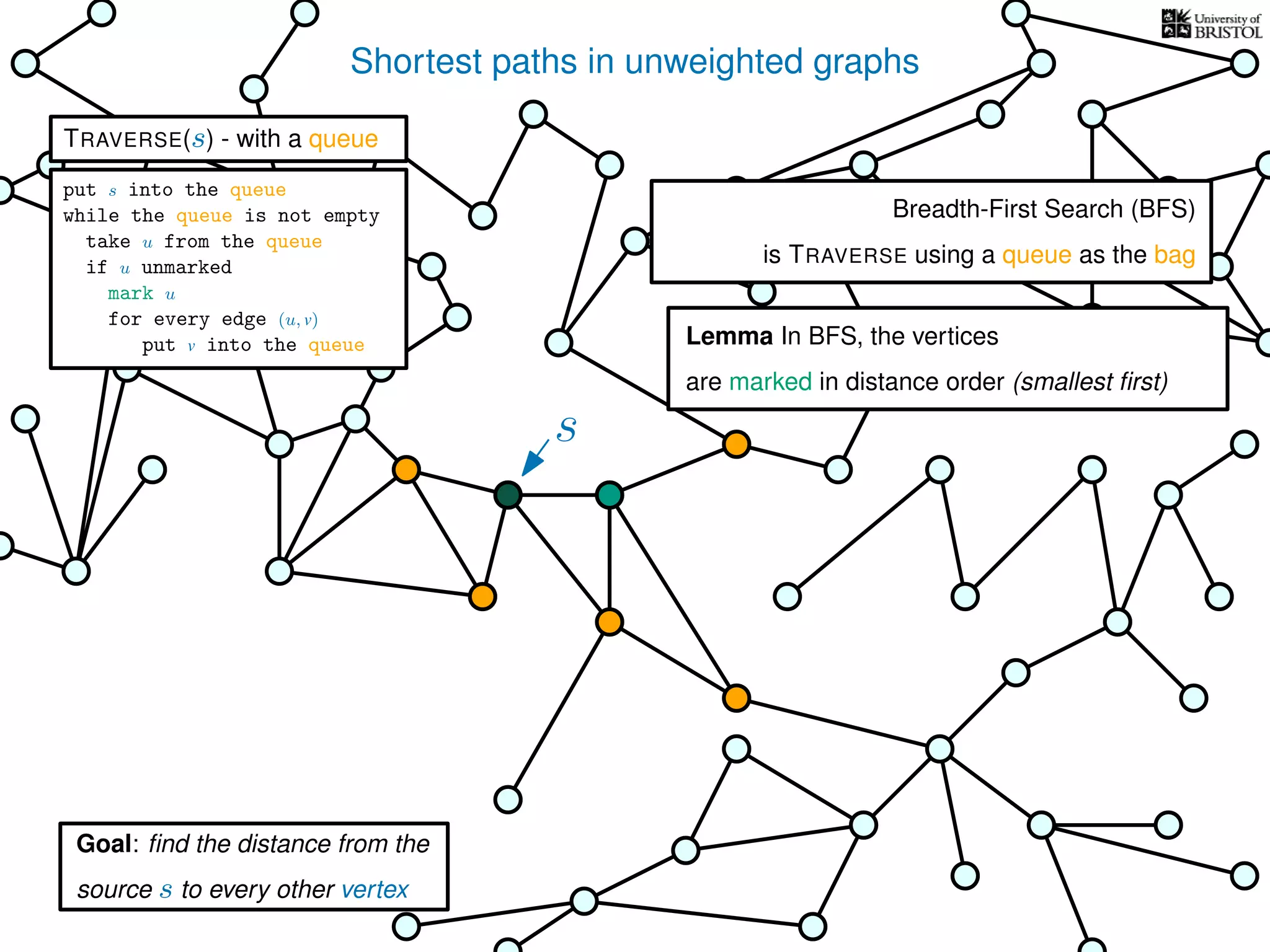
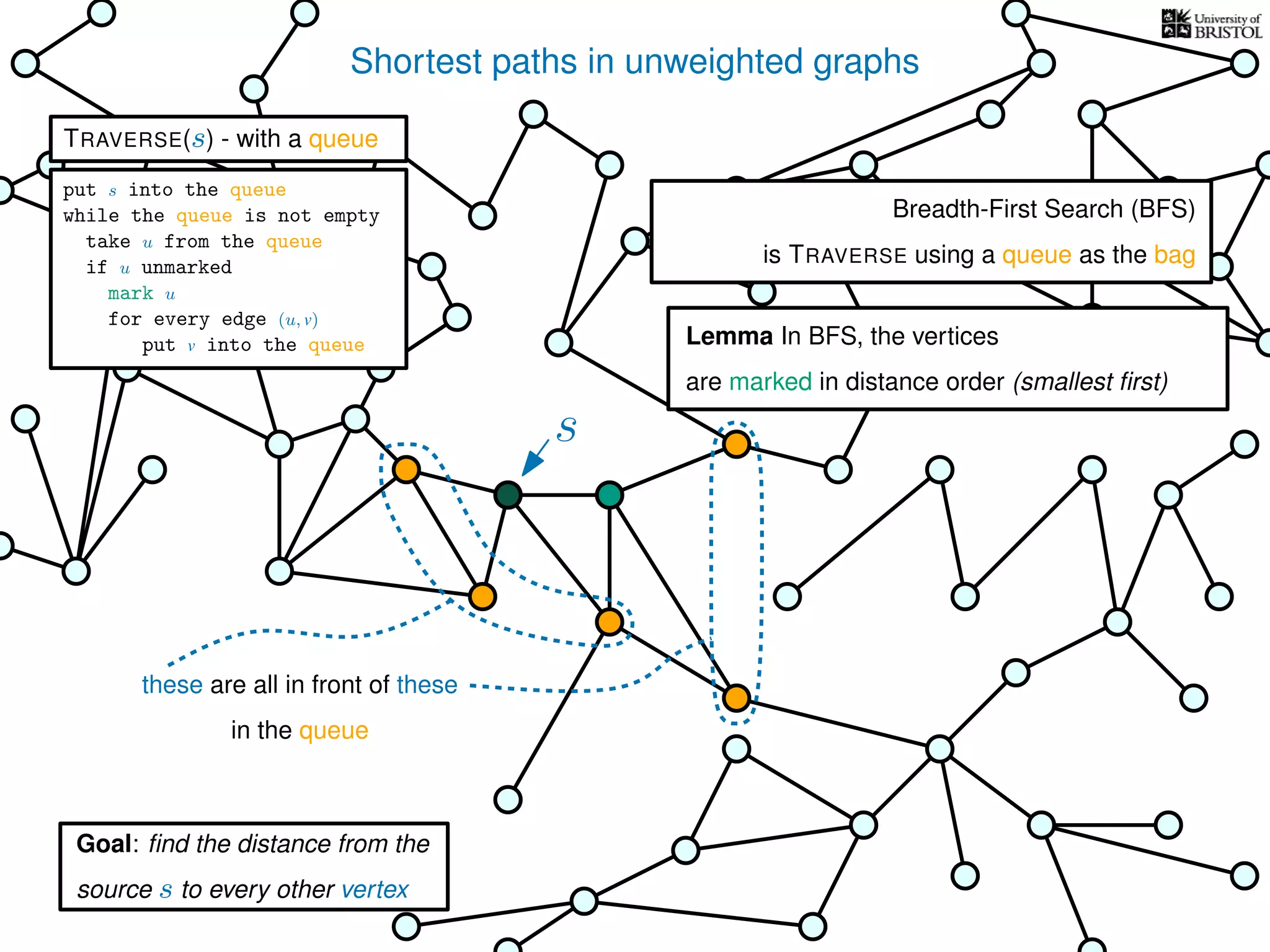
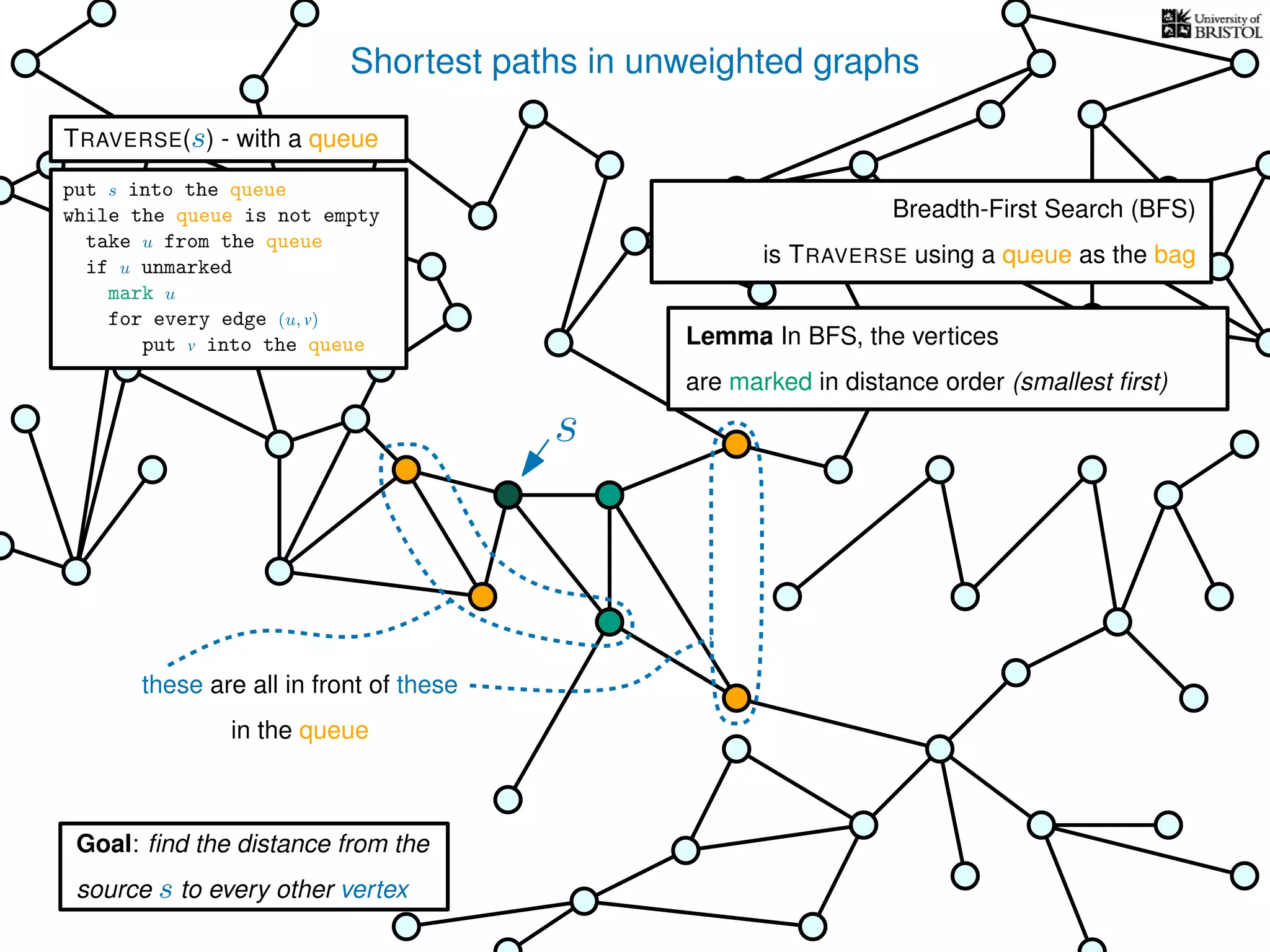
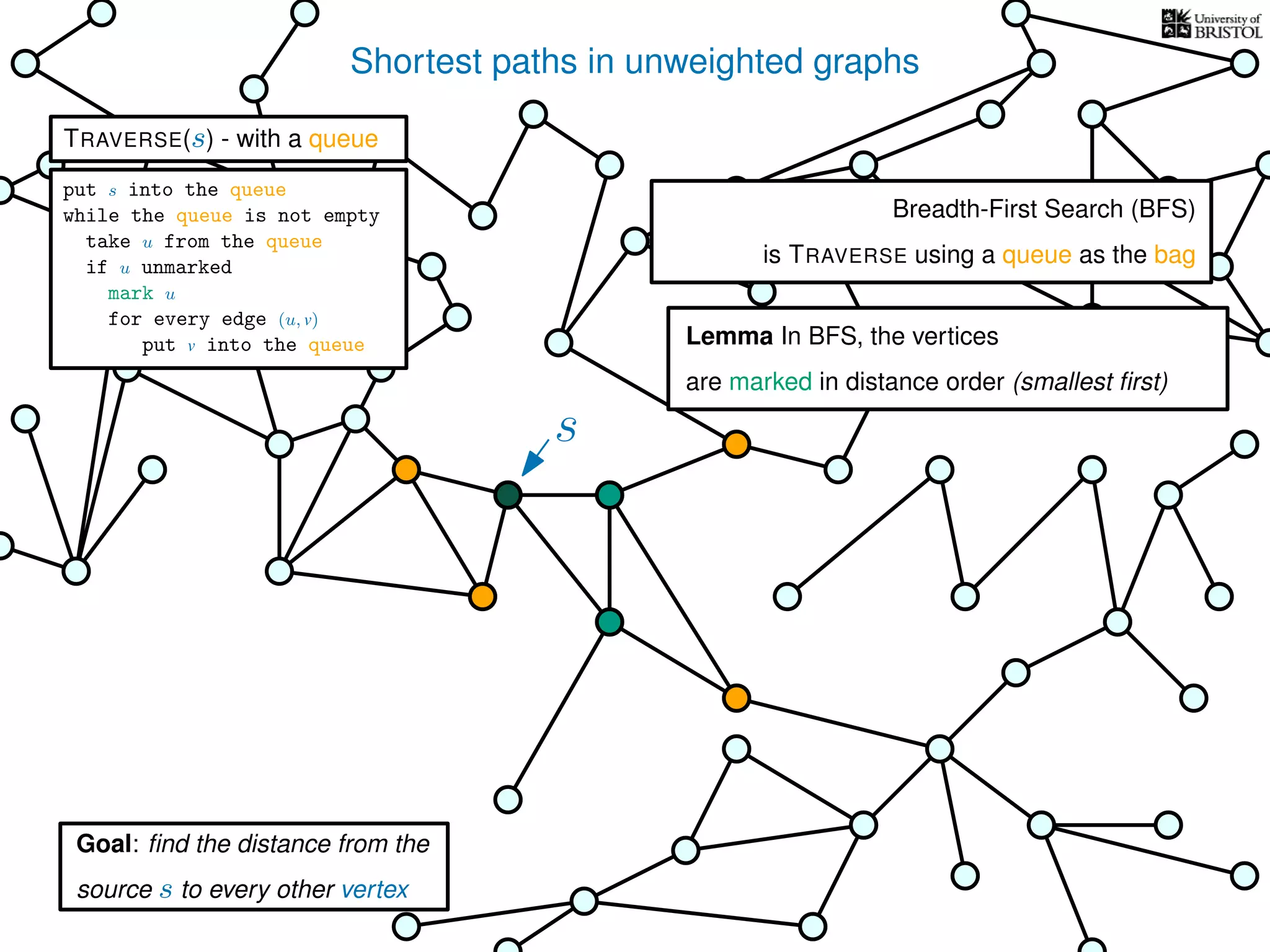
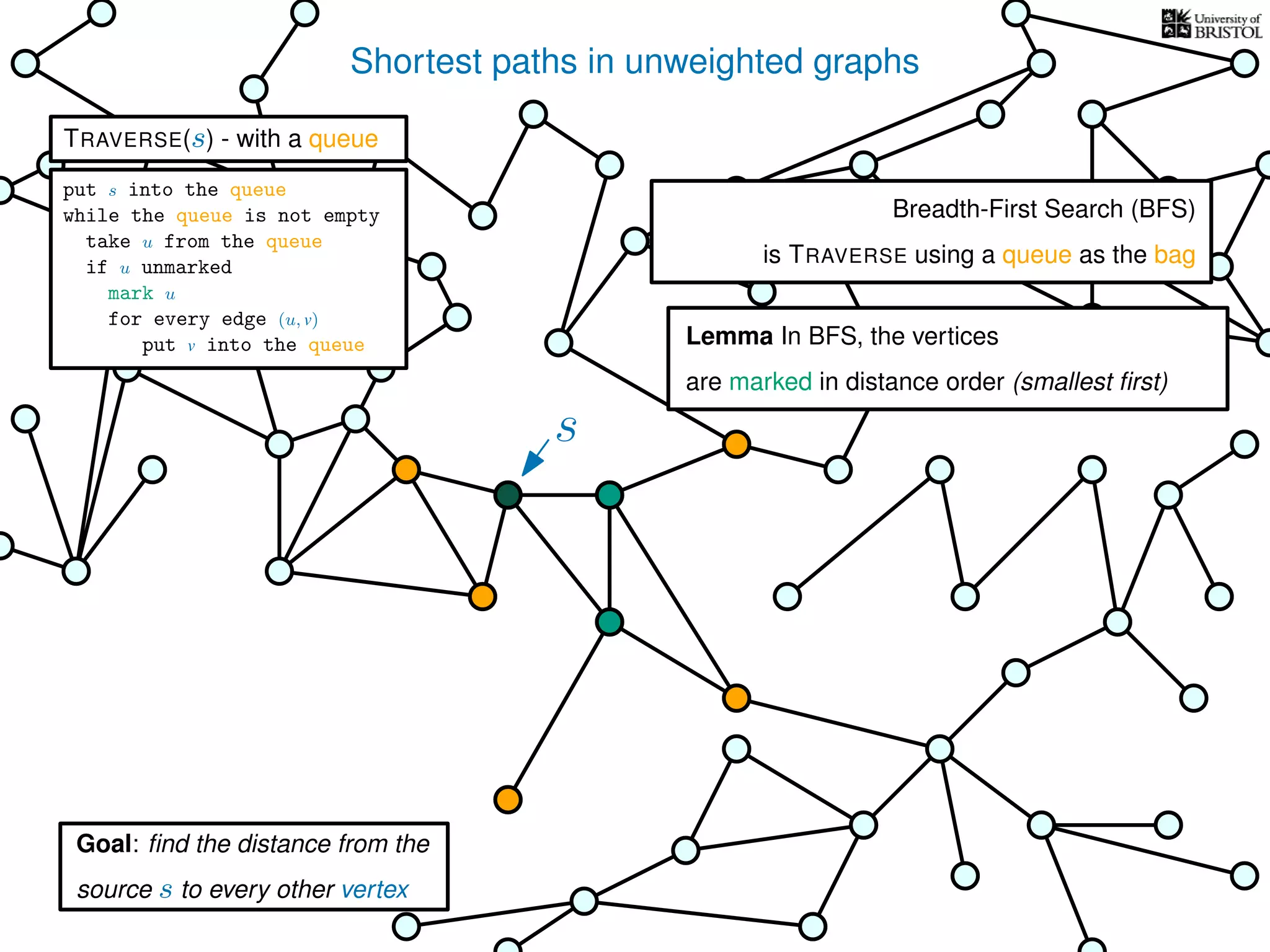
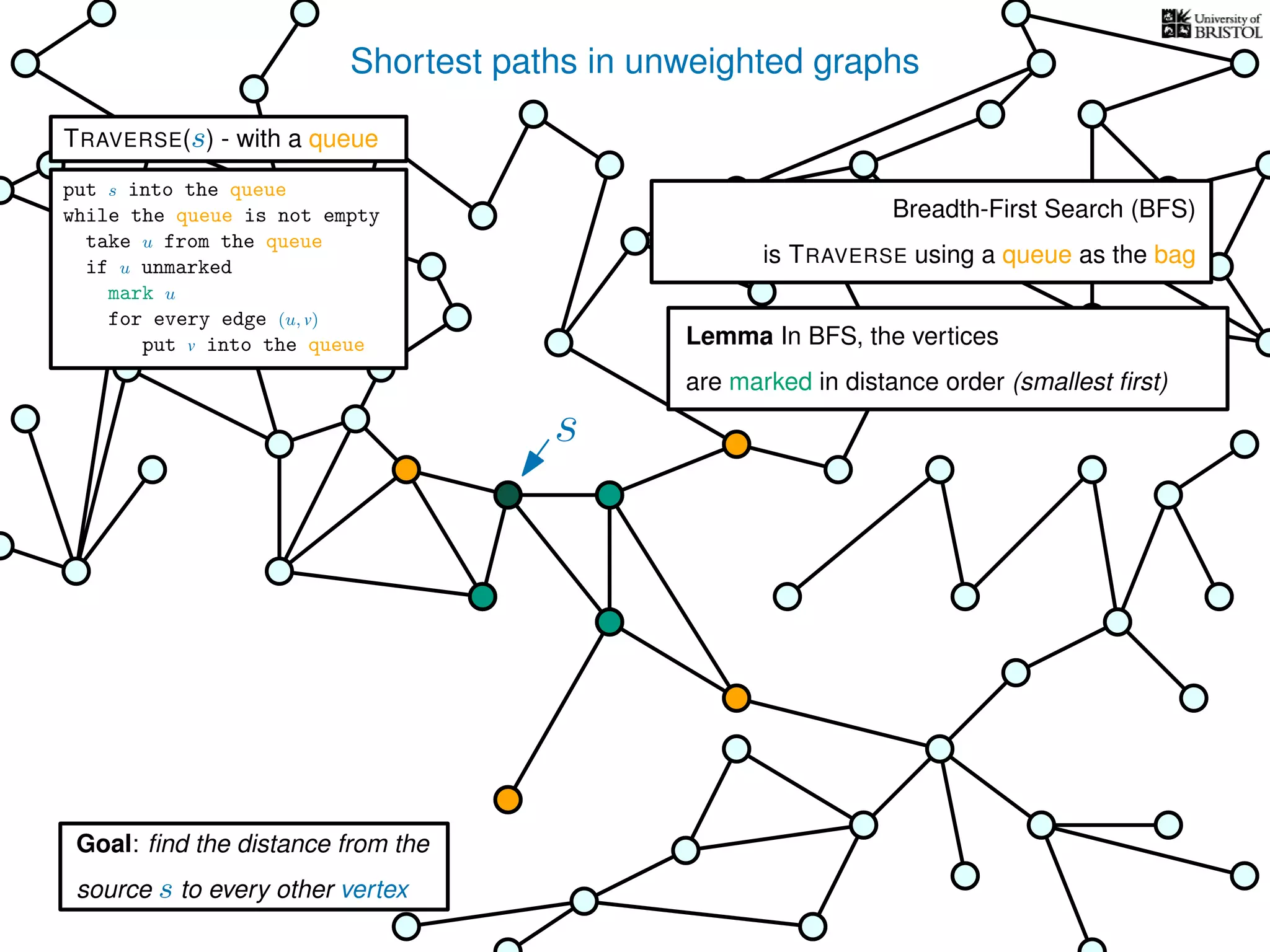
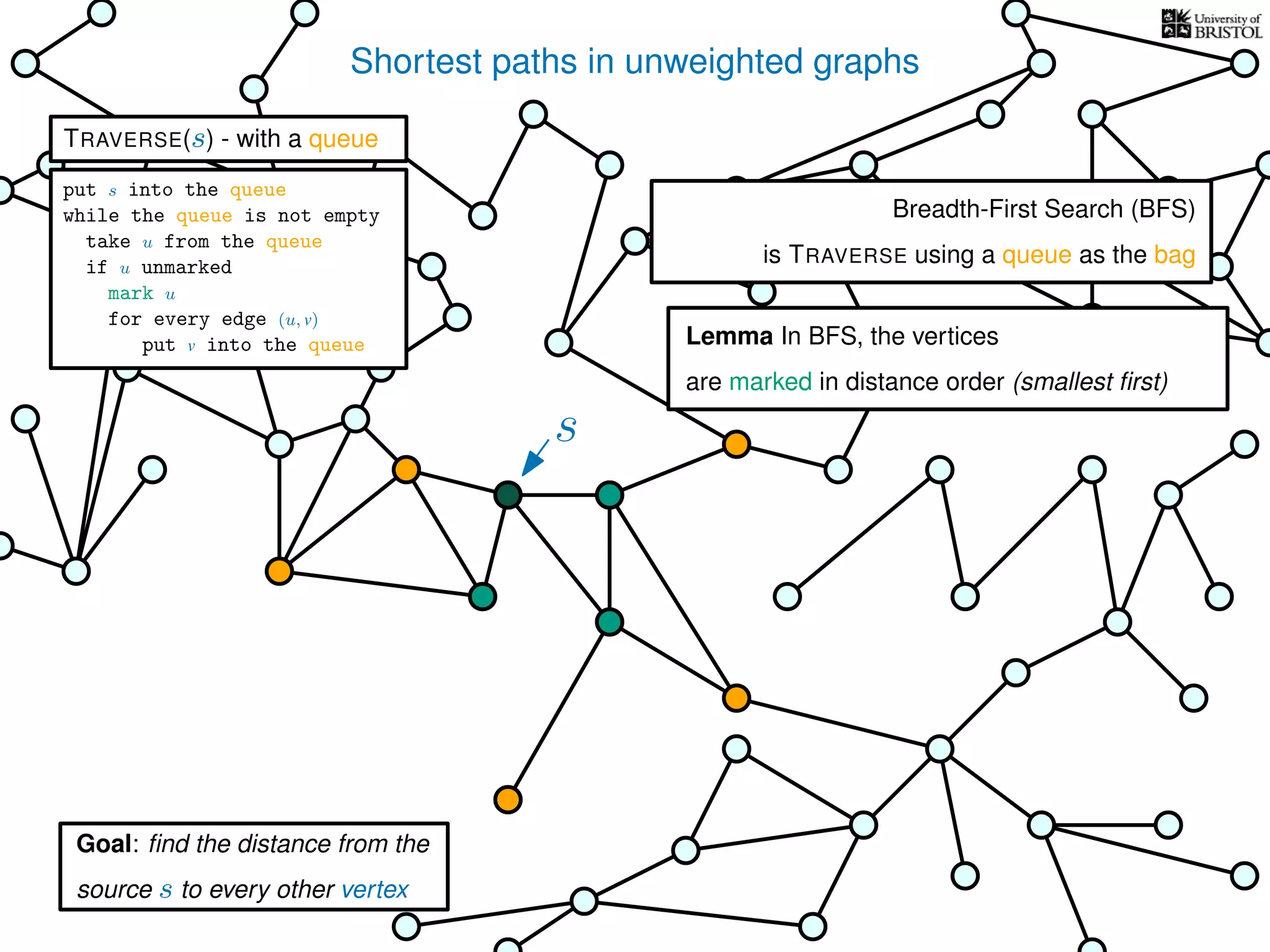
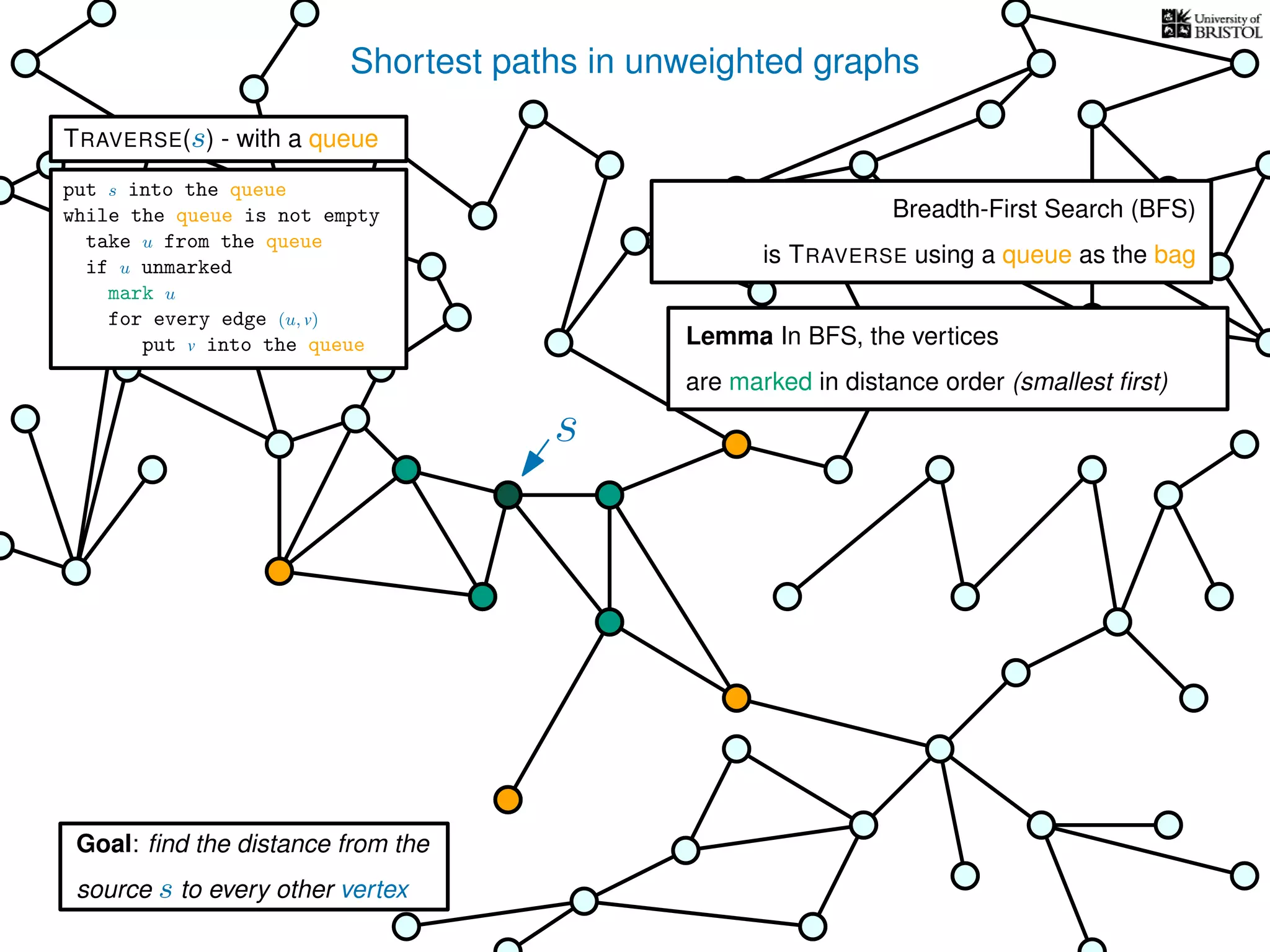
The document discusses data structures and algorithms related to graphs, focusing on undirected and unweighted graphs. It introduces graph notation, various graph representations (like adjacency matrices and lists), and basic operations performed on these graphs. Depth-first search and breadth-first search algorithms are also mentioned as methods for exploring graphs.

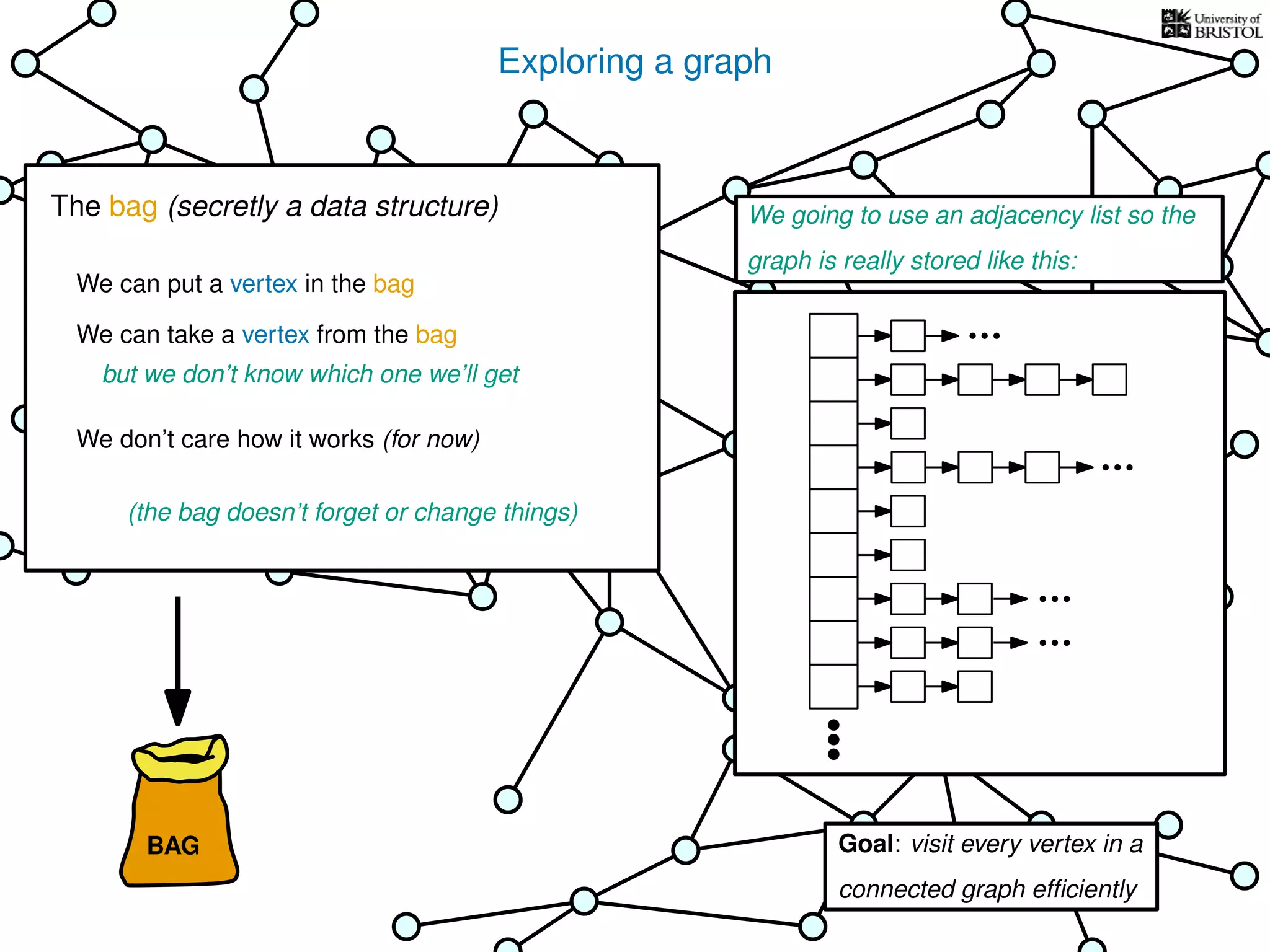
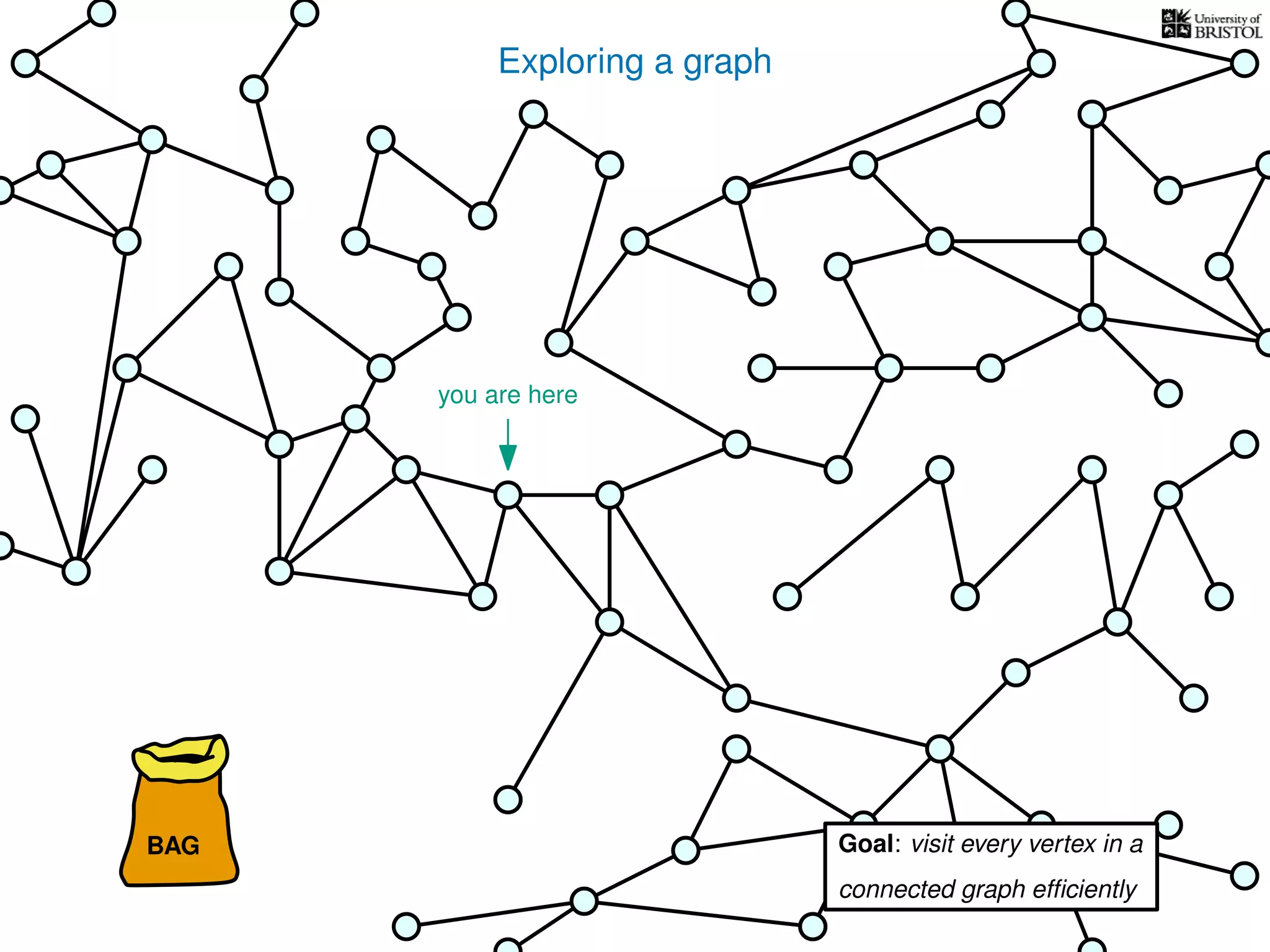
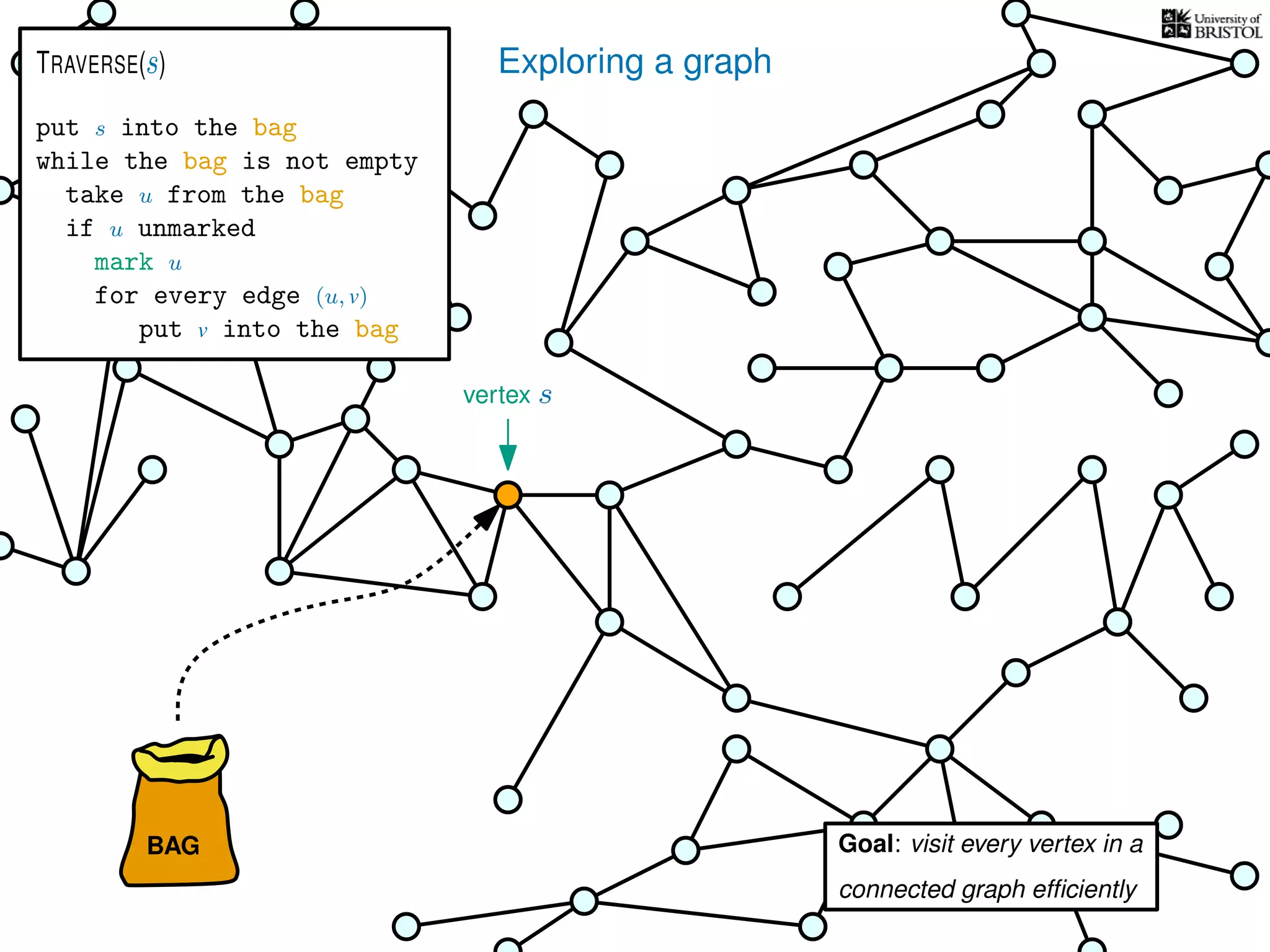
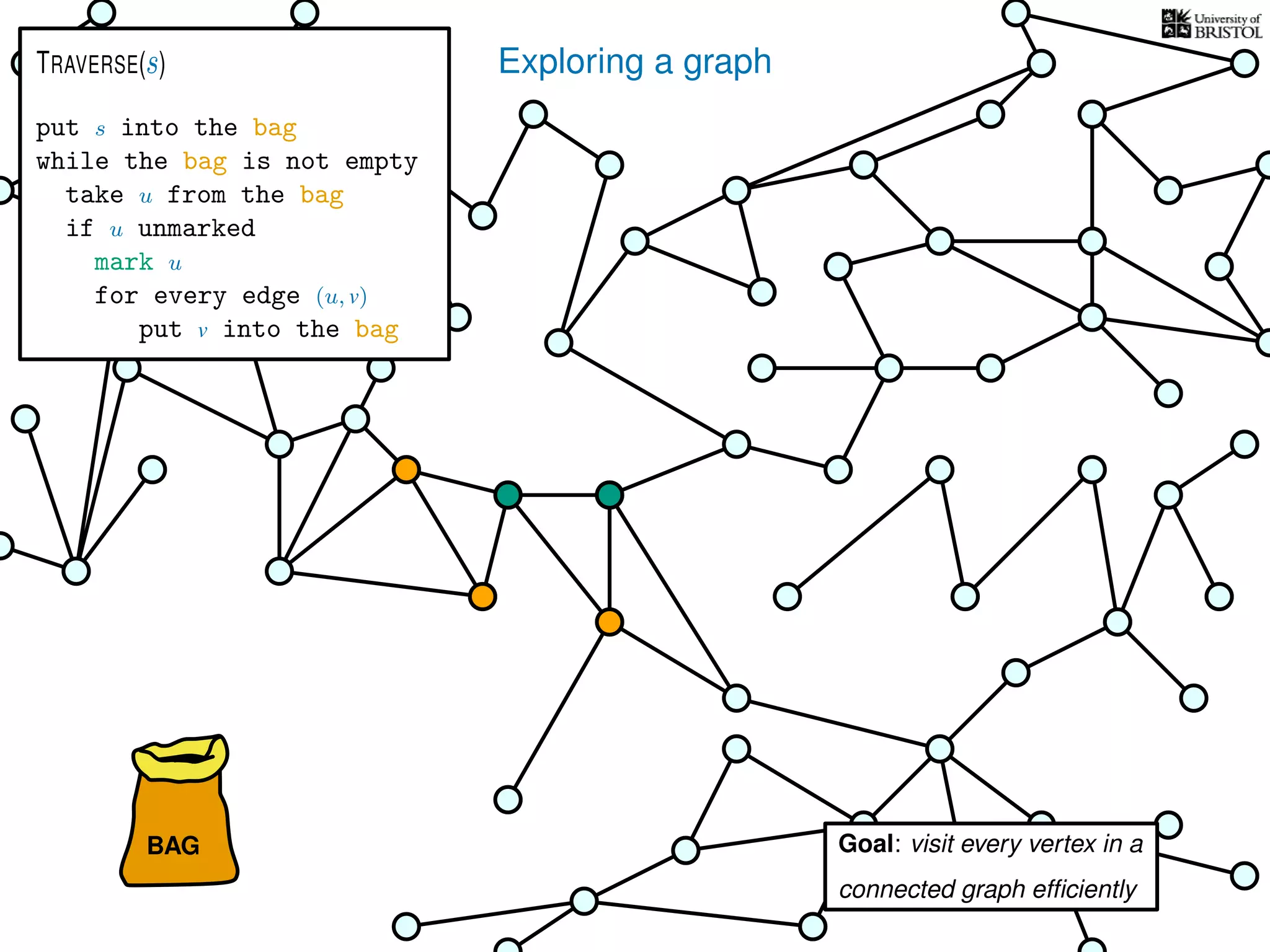
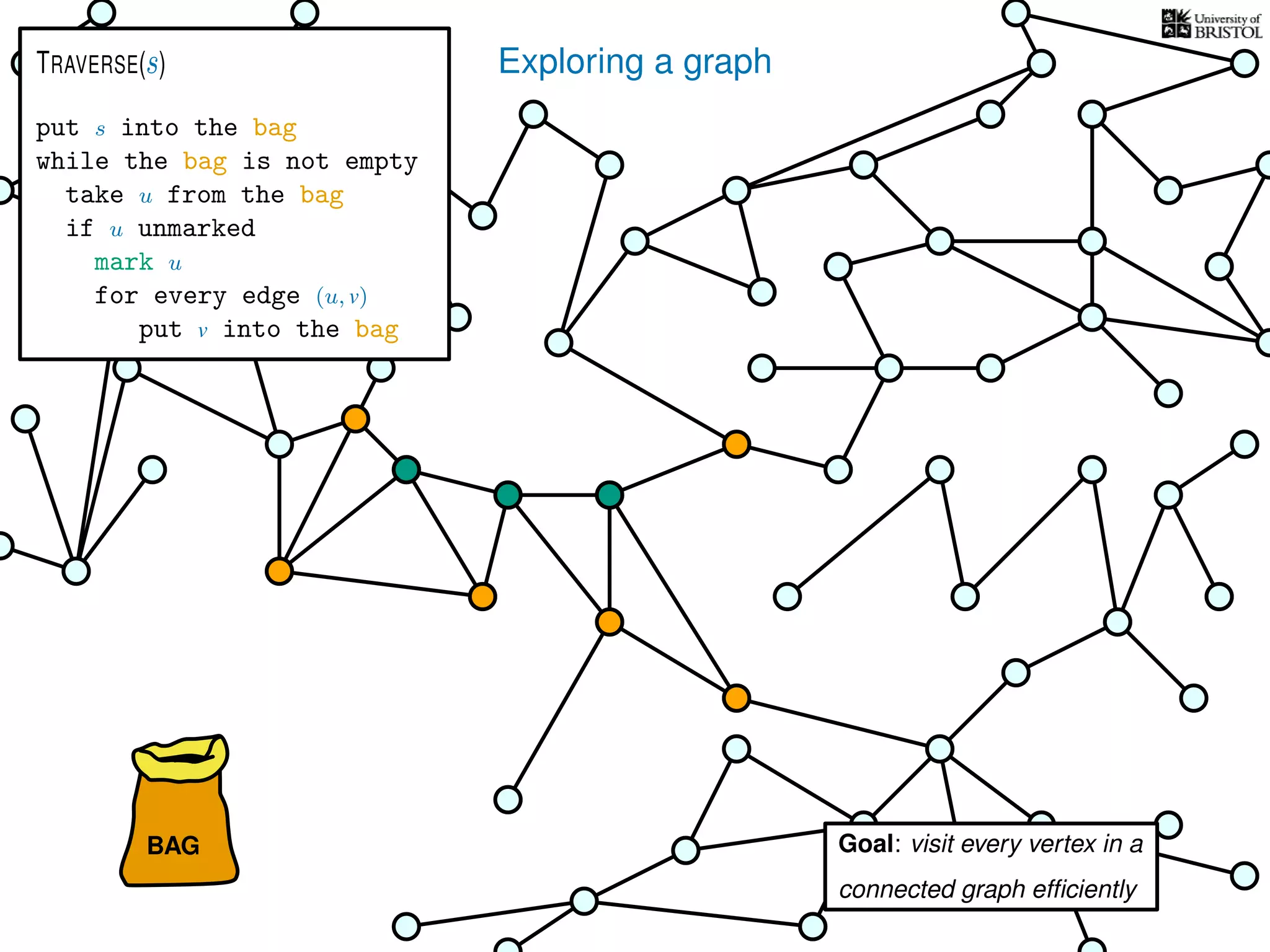
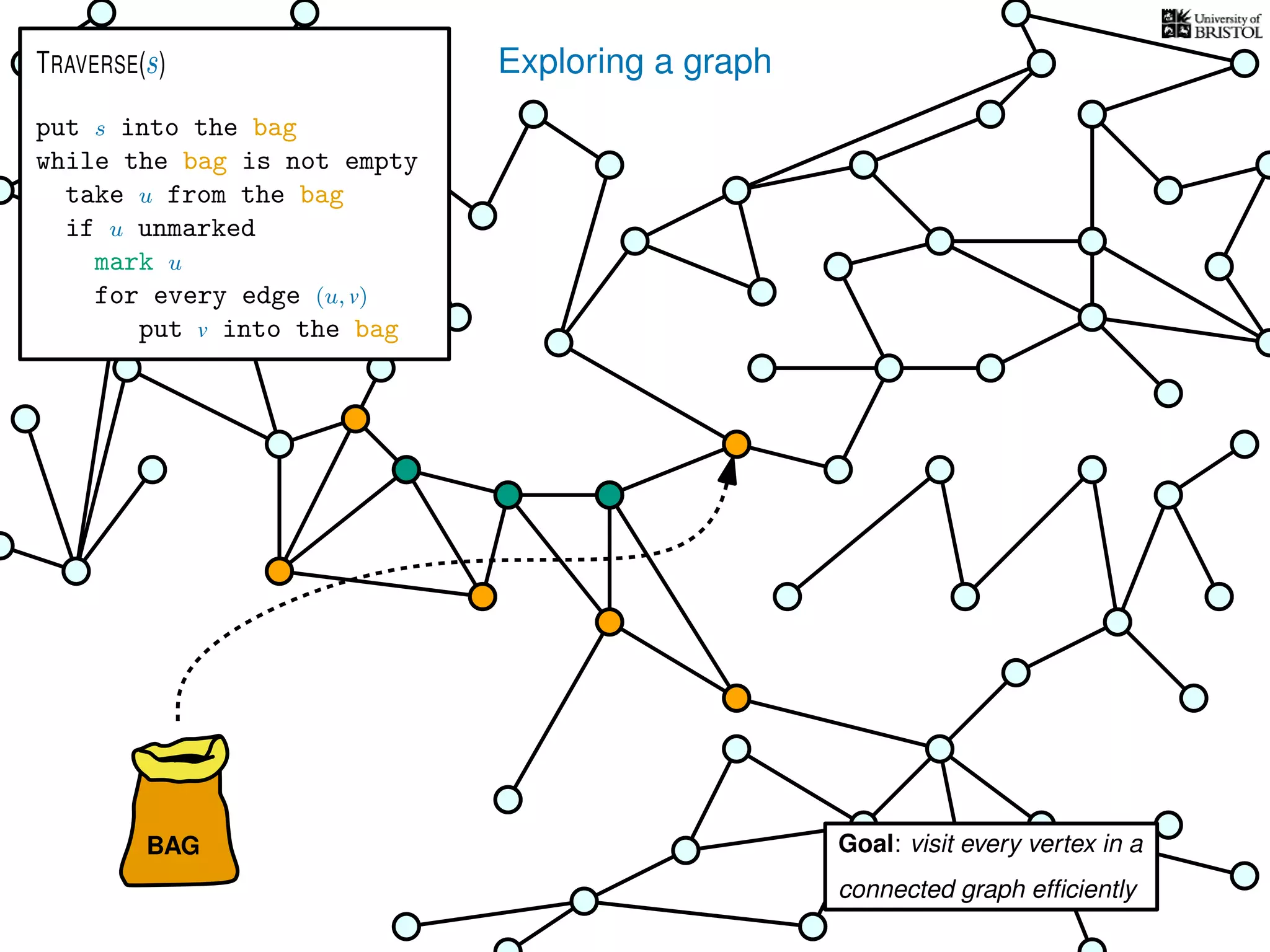
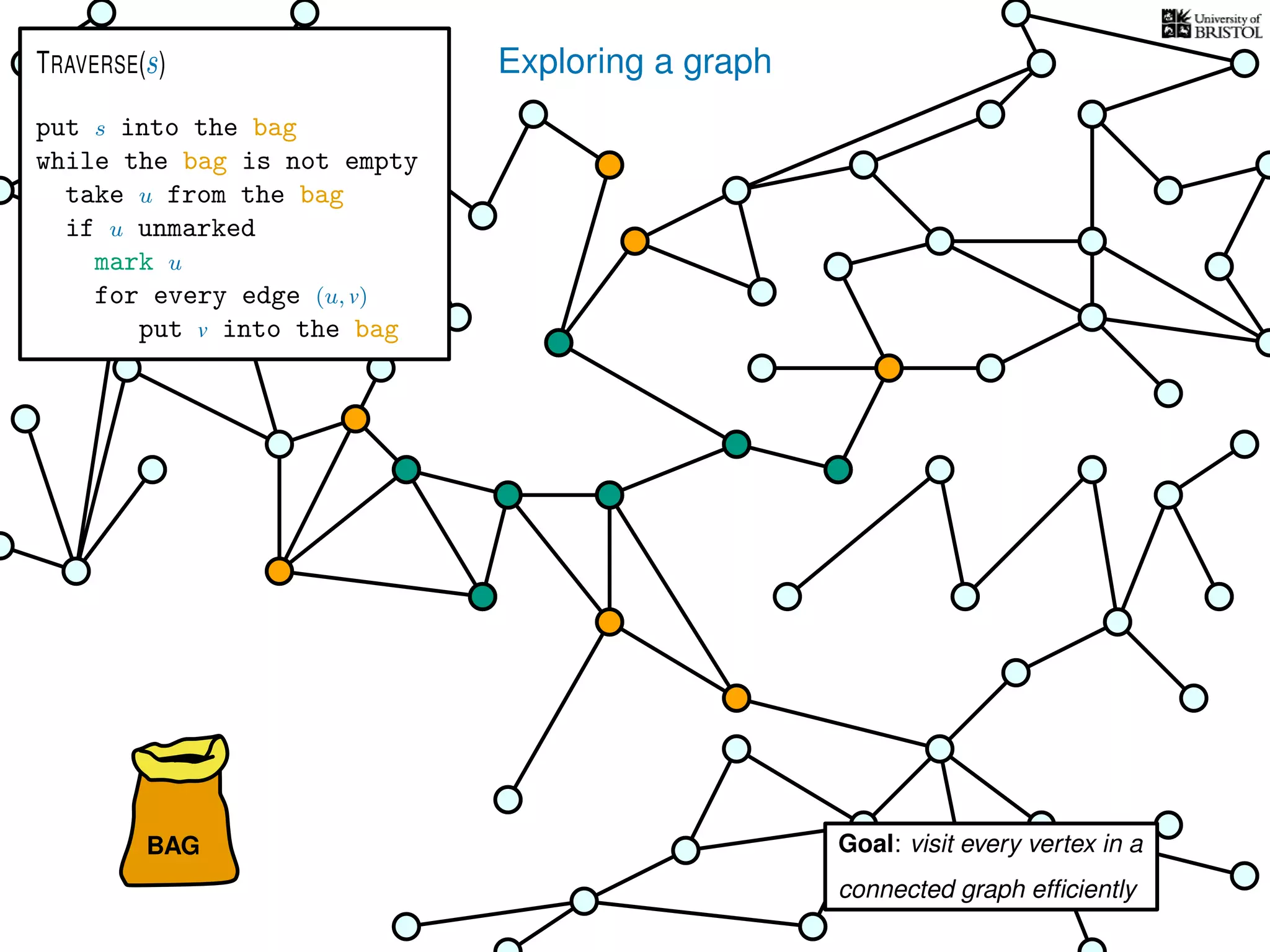
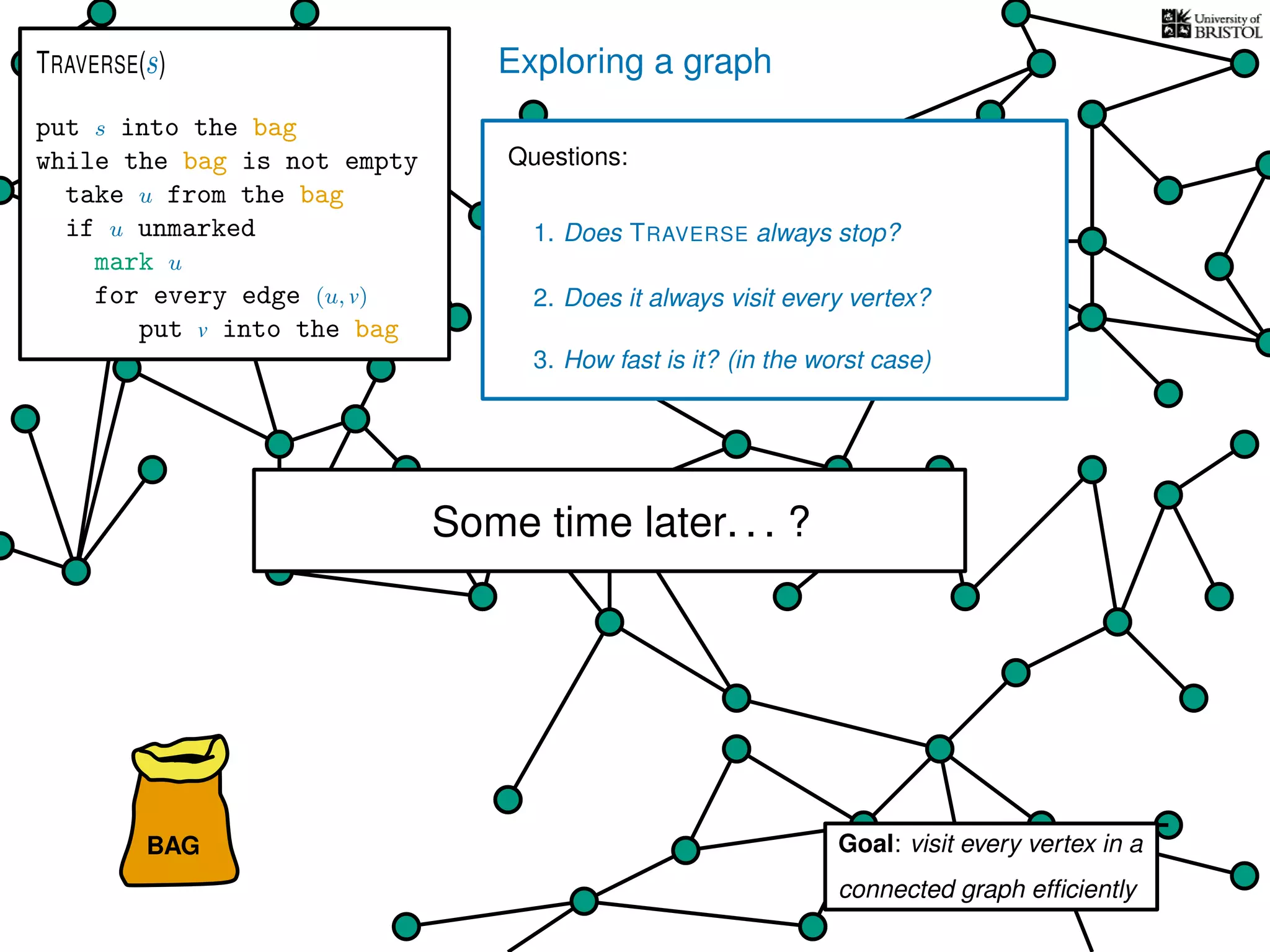
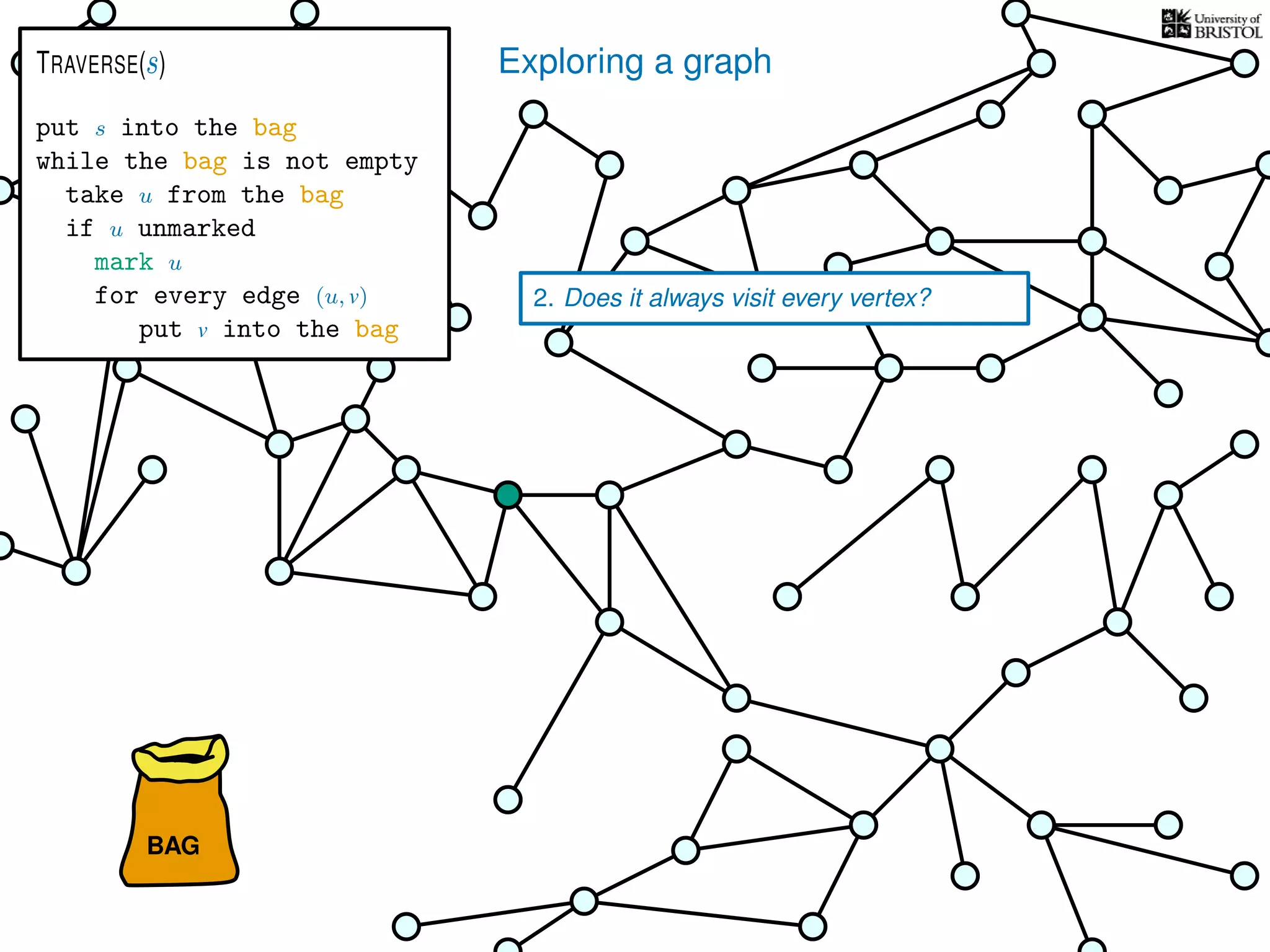

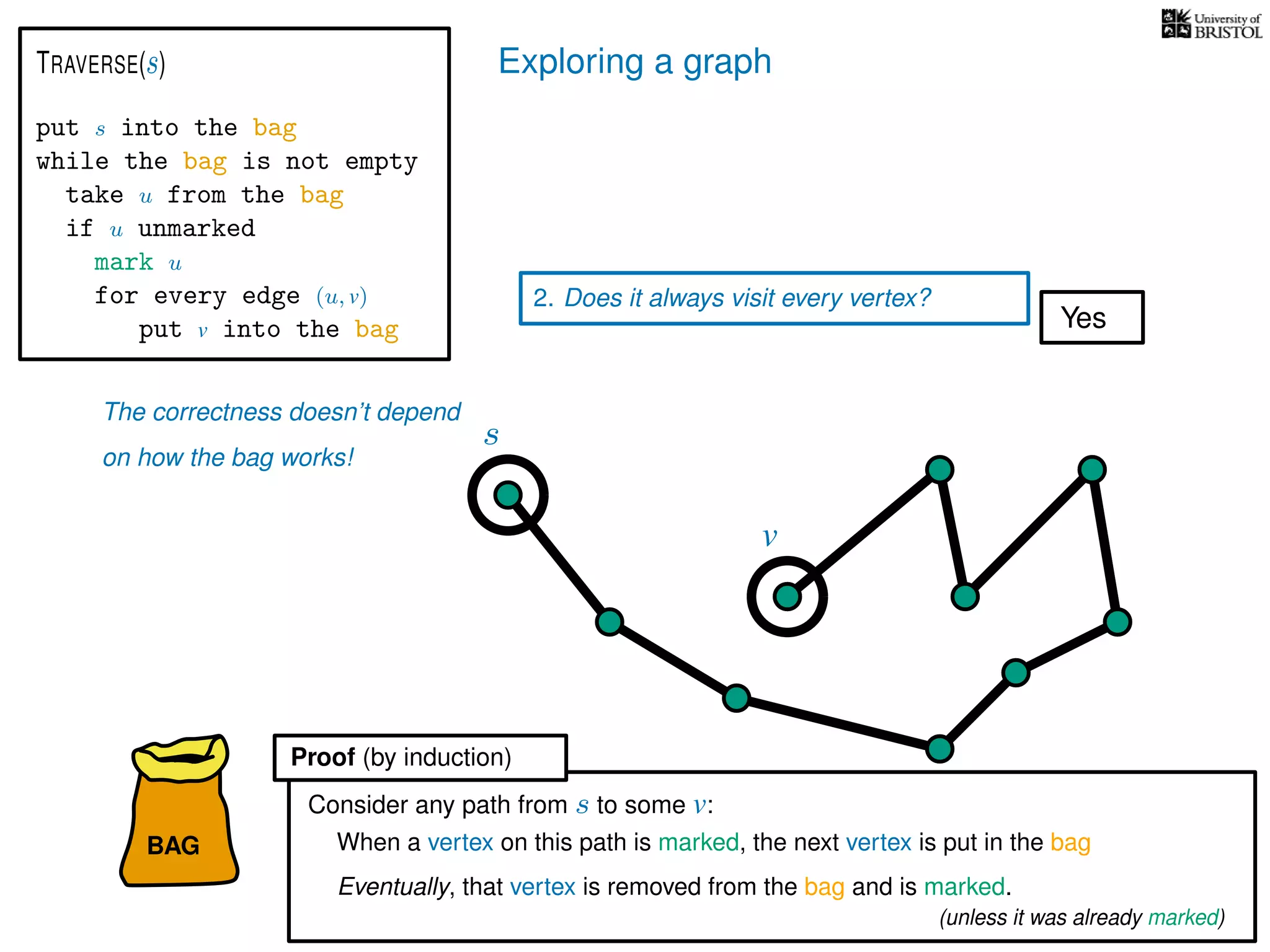
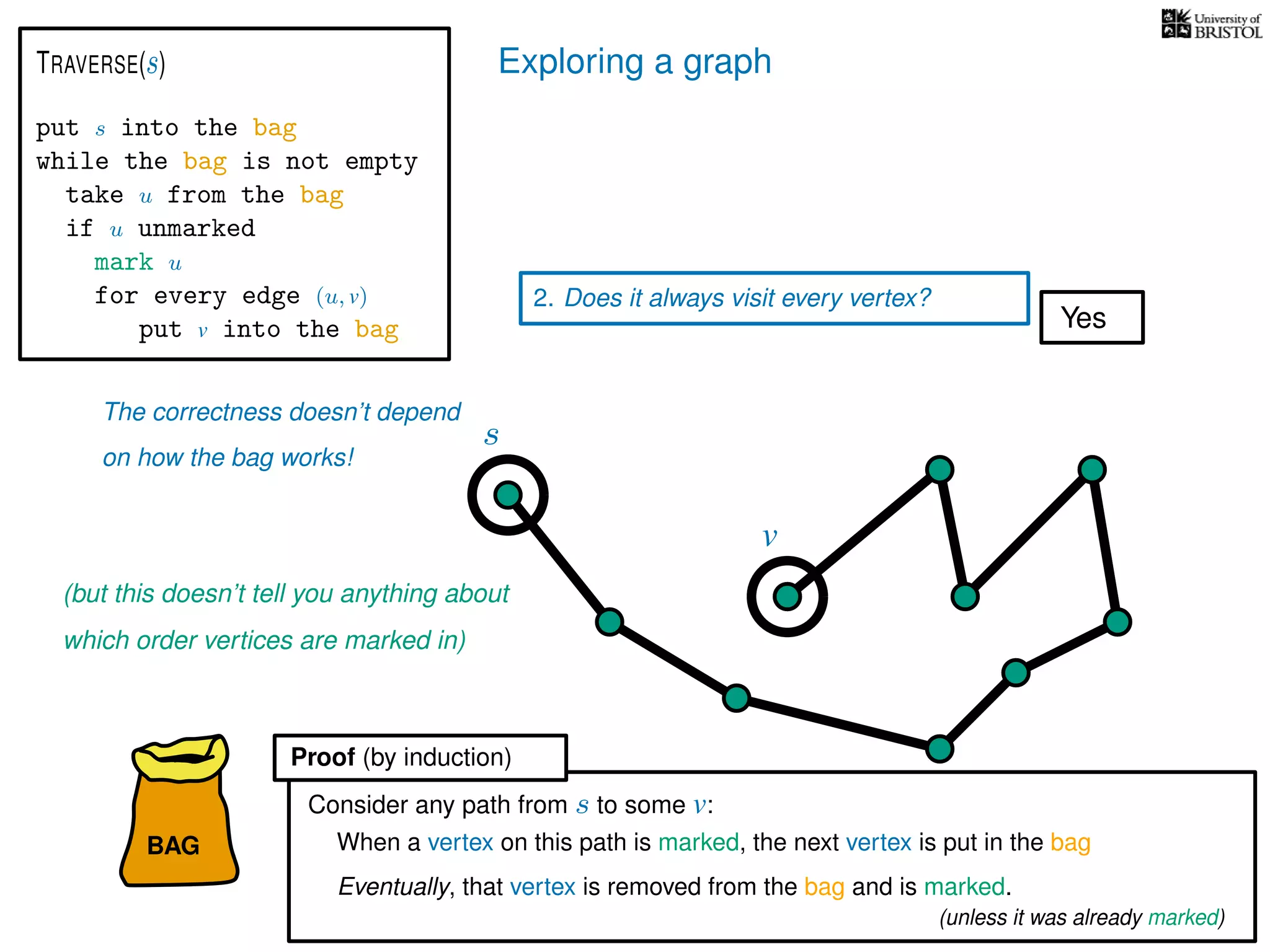
![Exploring a graph
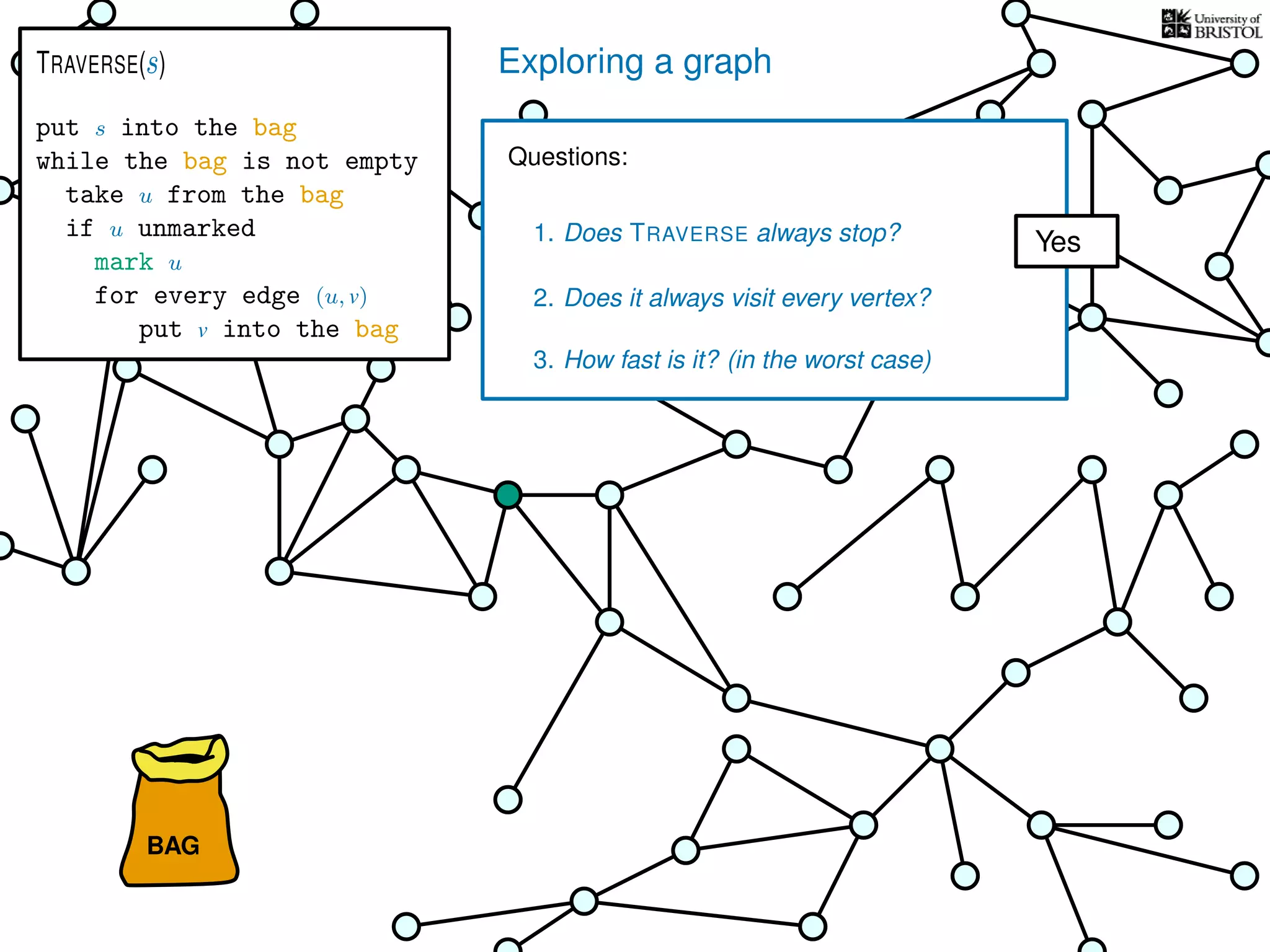
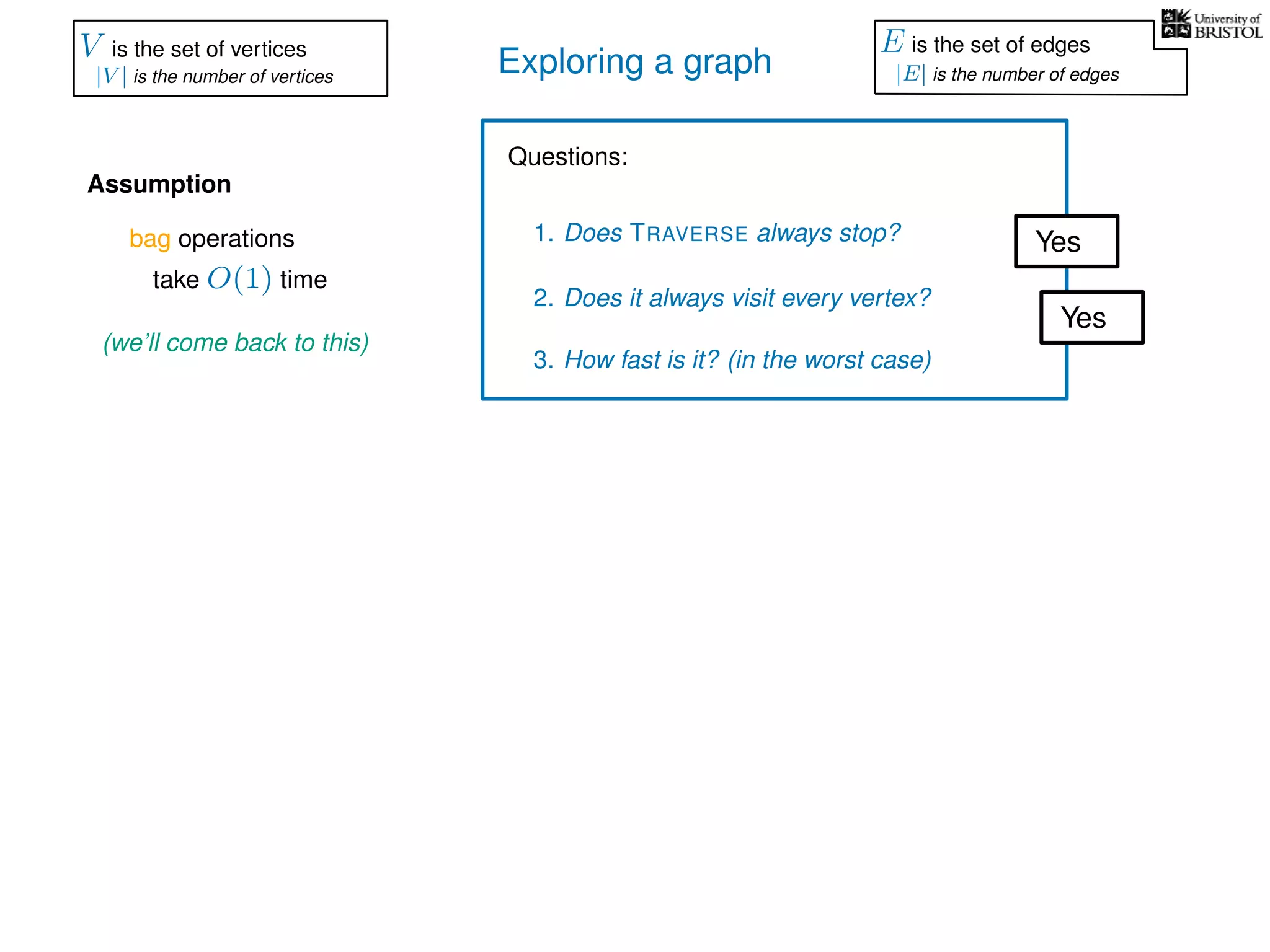
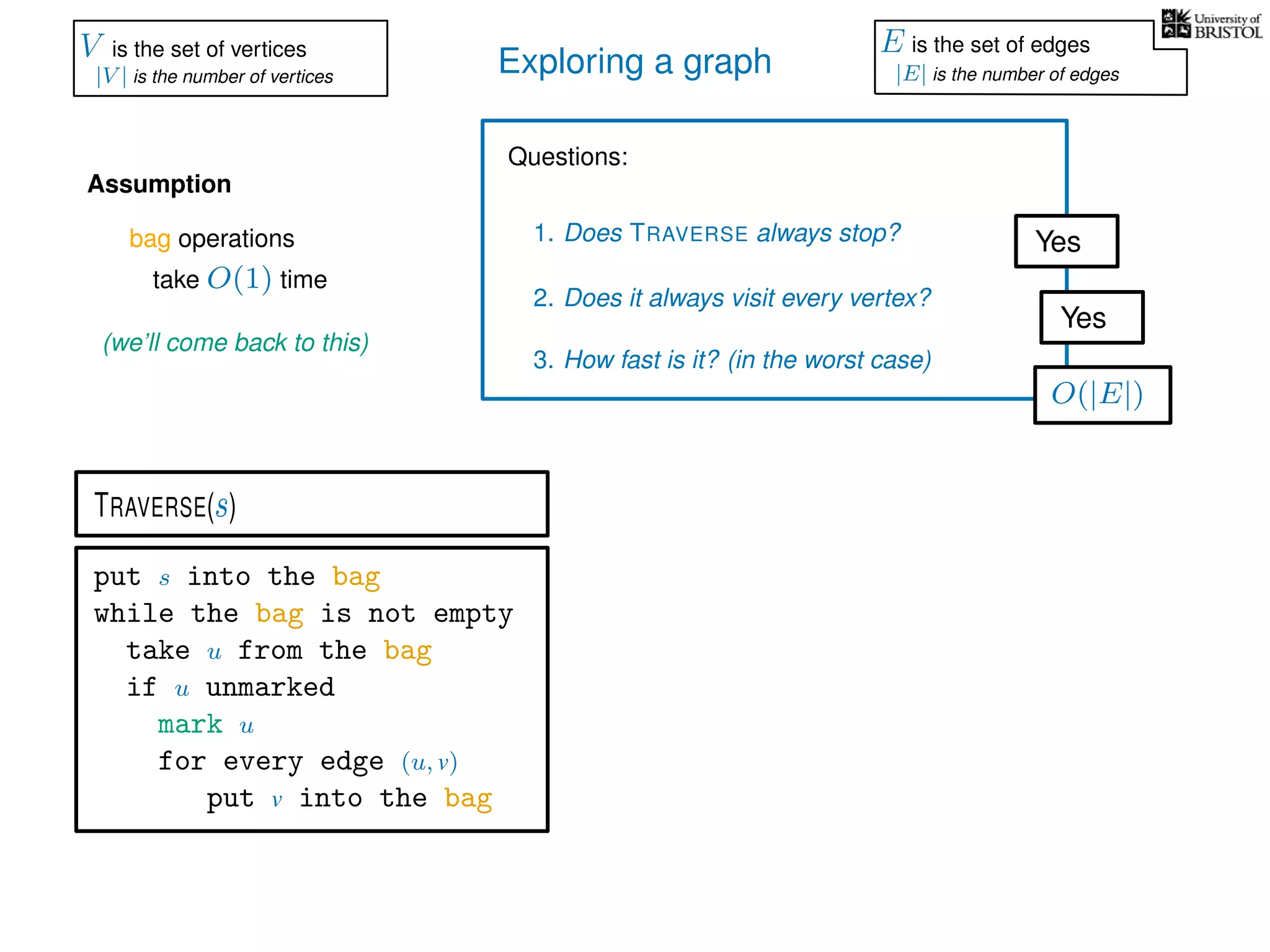
Questions:
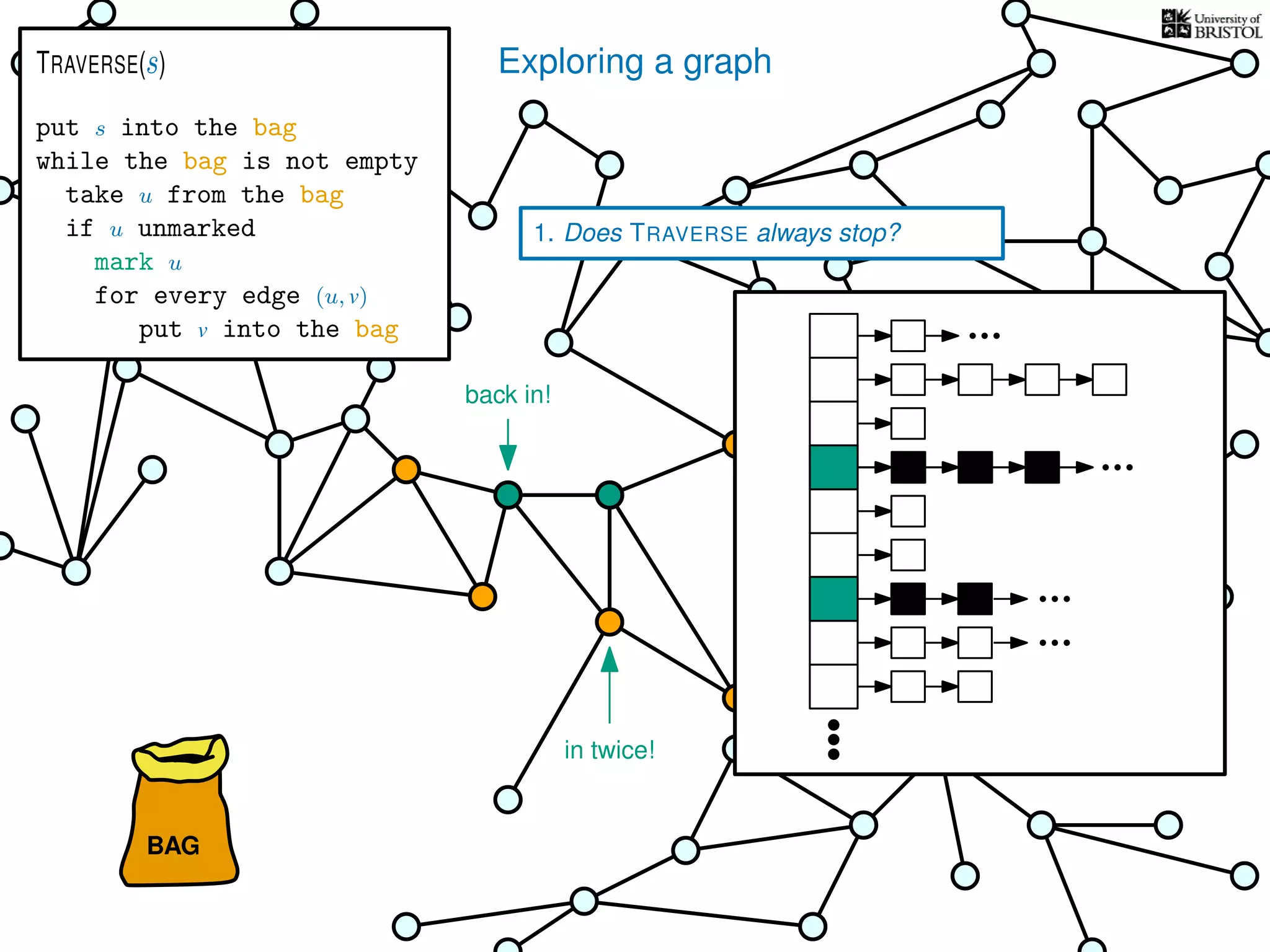
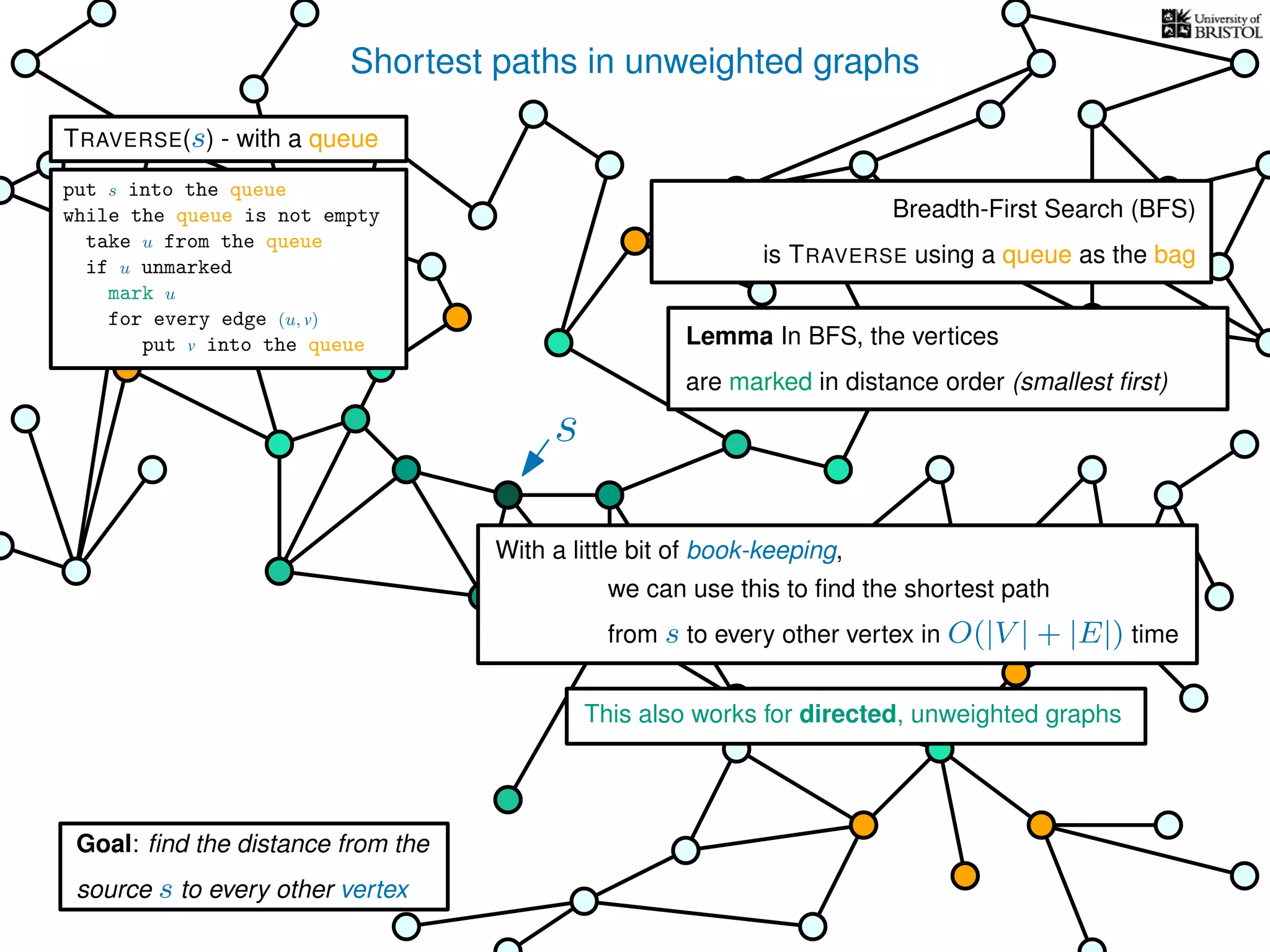
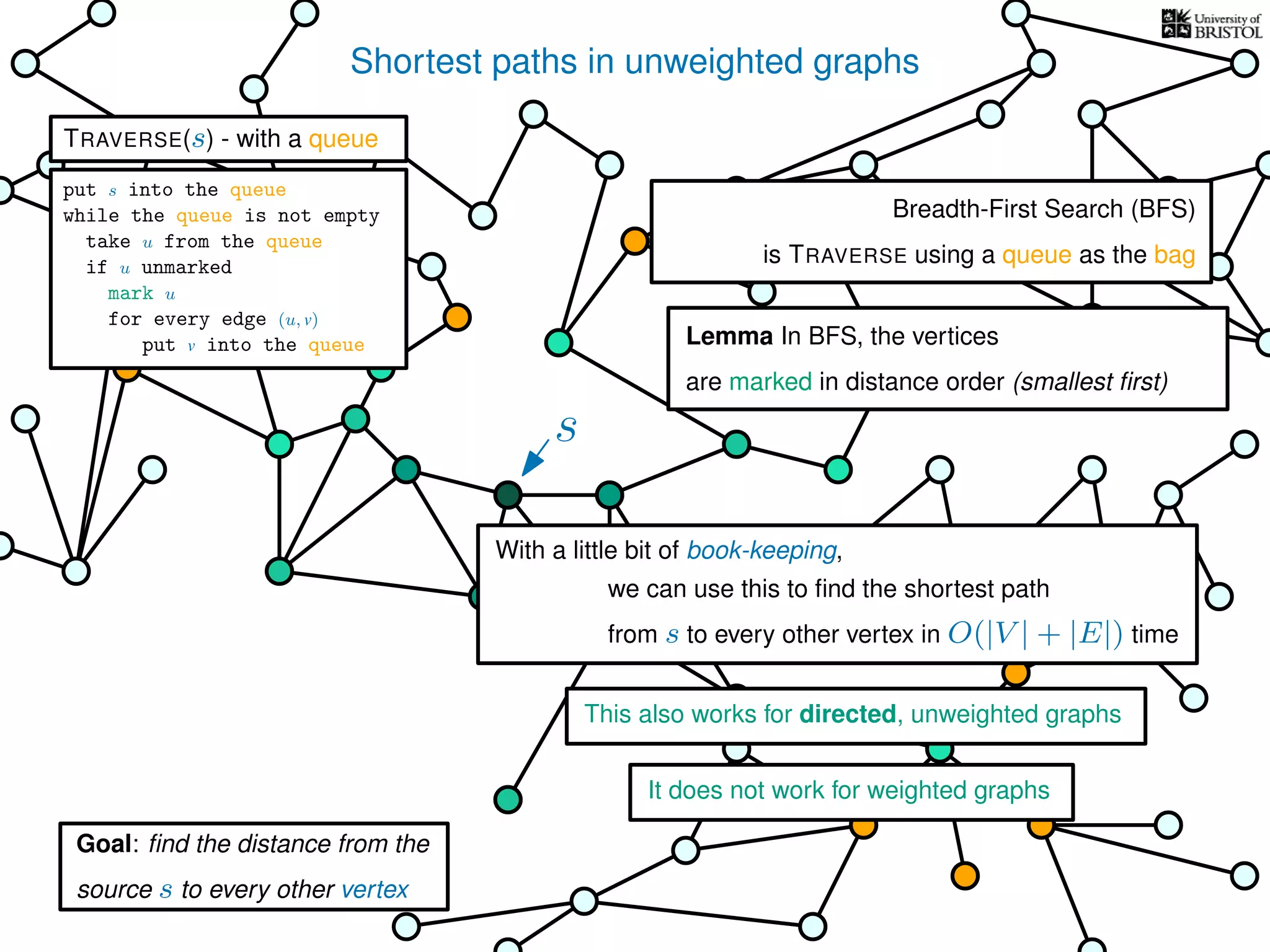
1. Does TRAVERSE always stop?
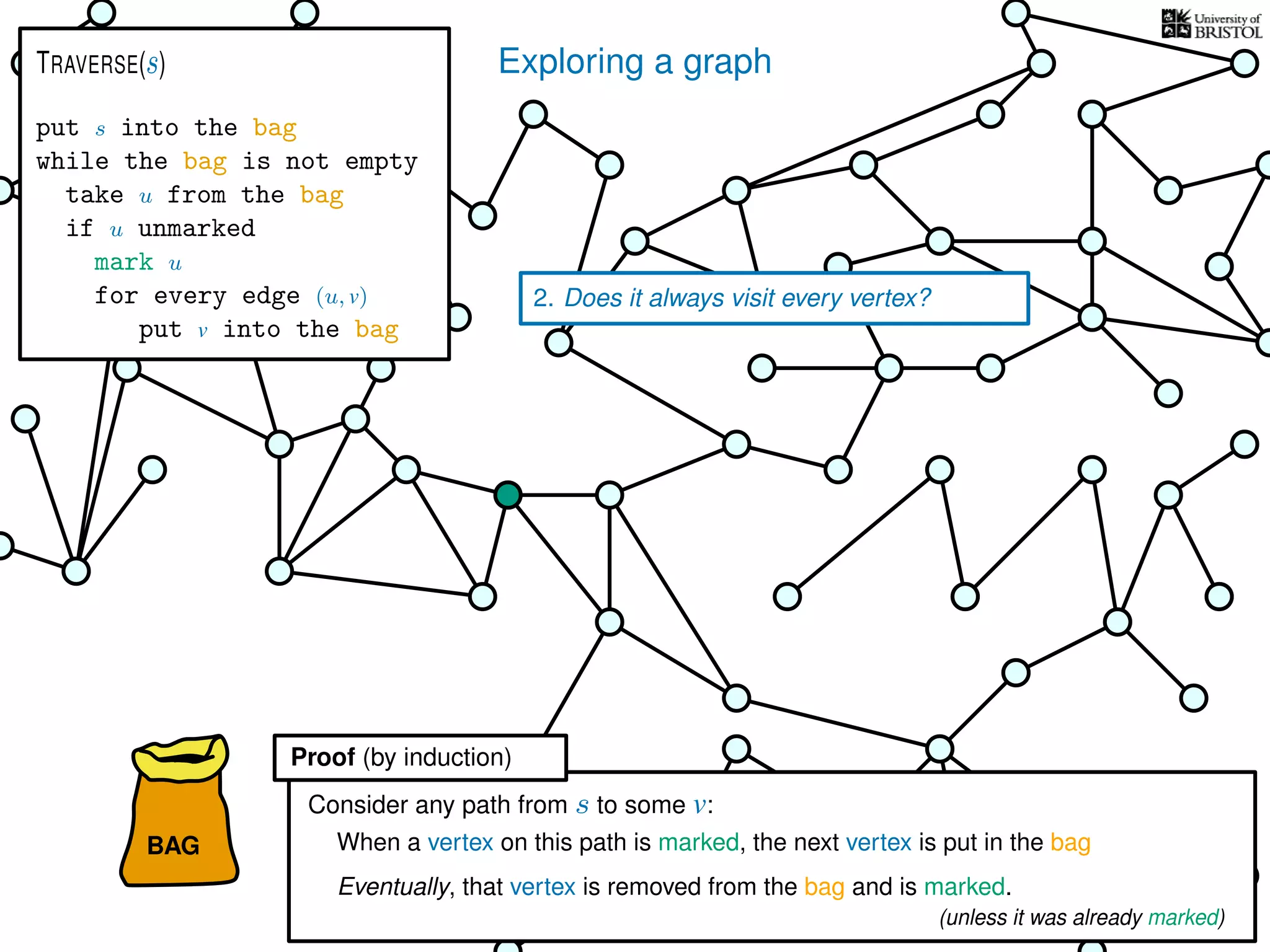
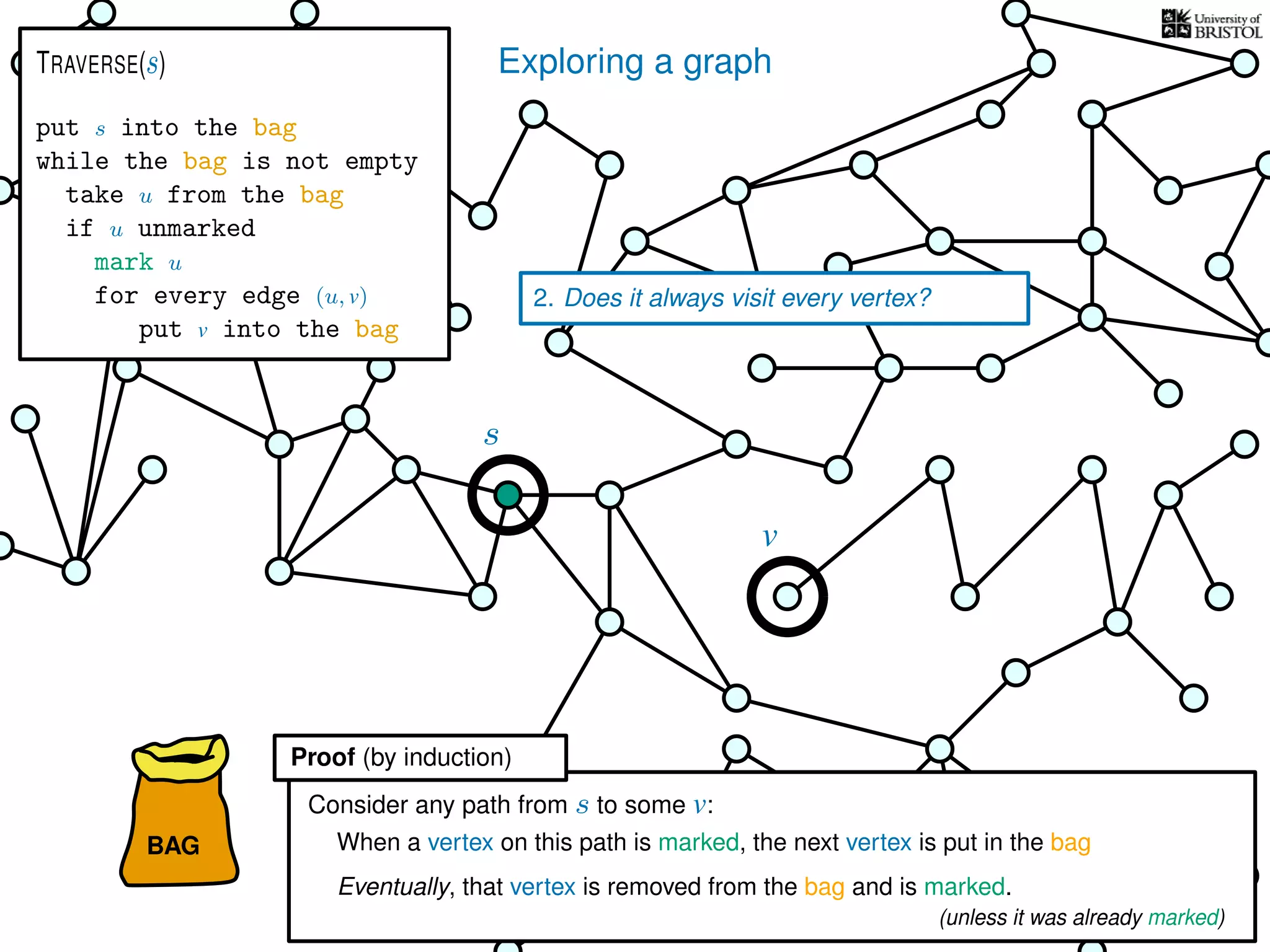
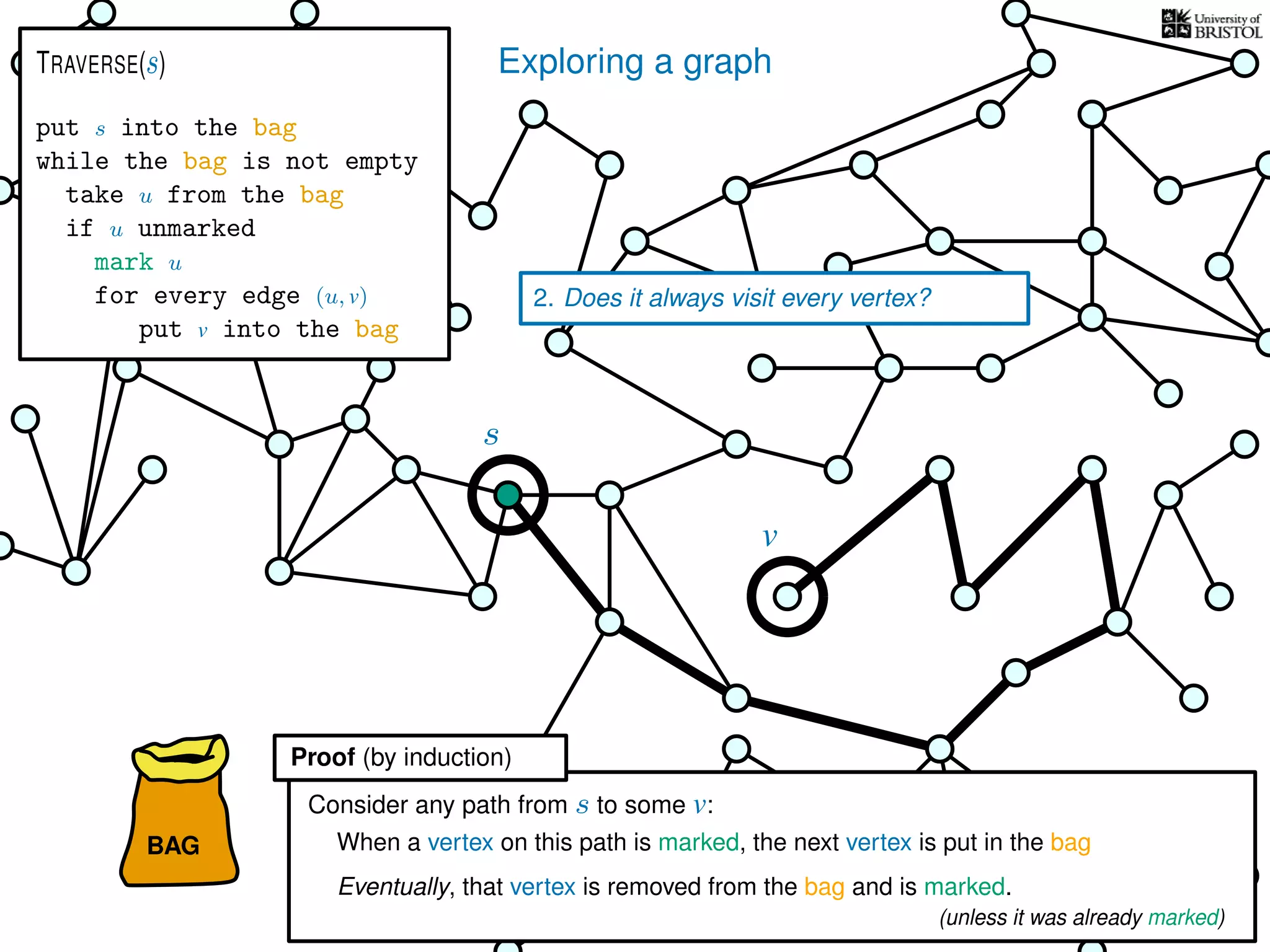
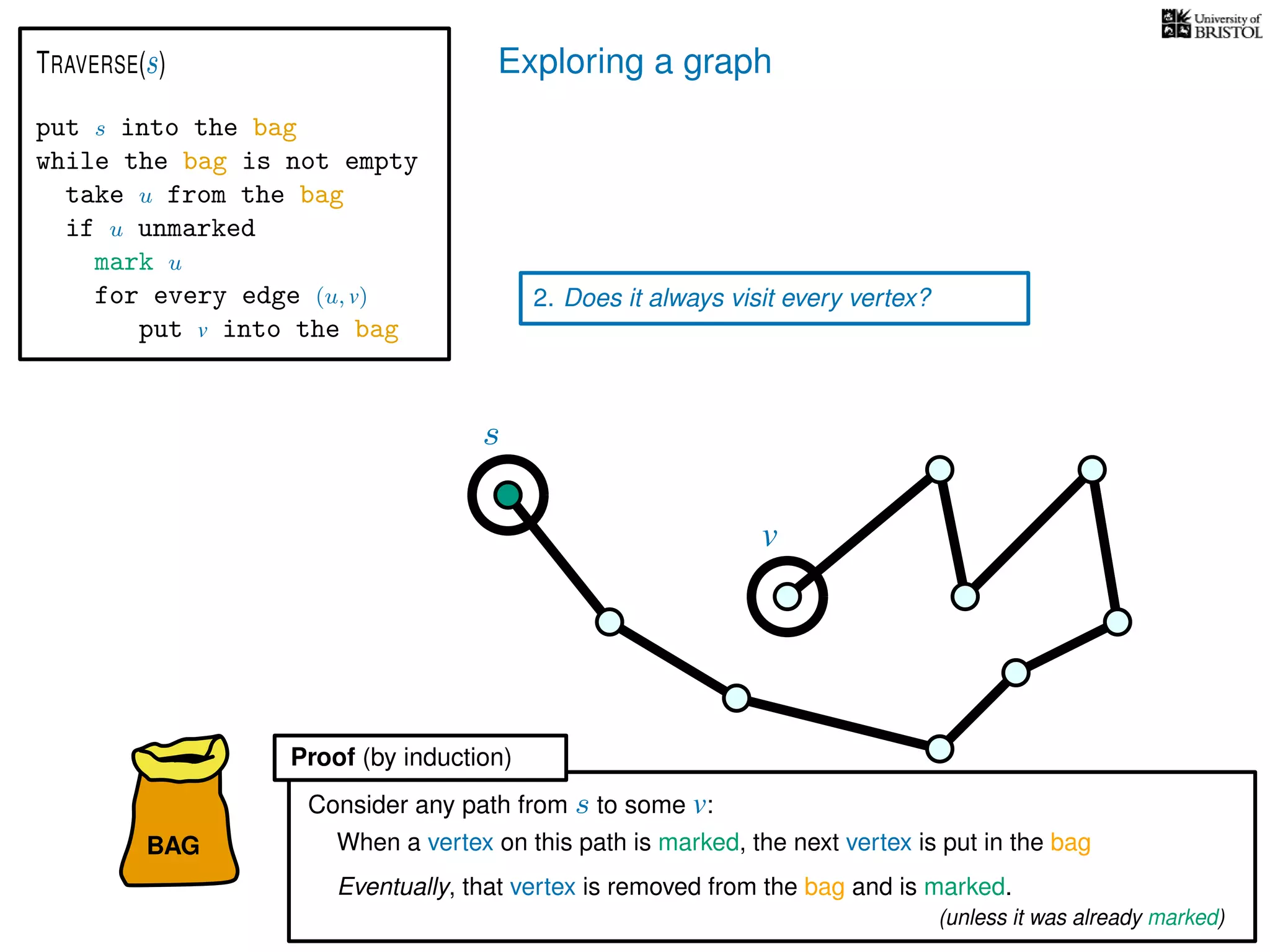
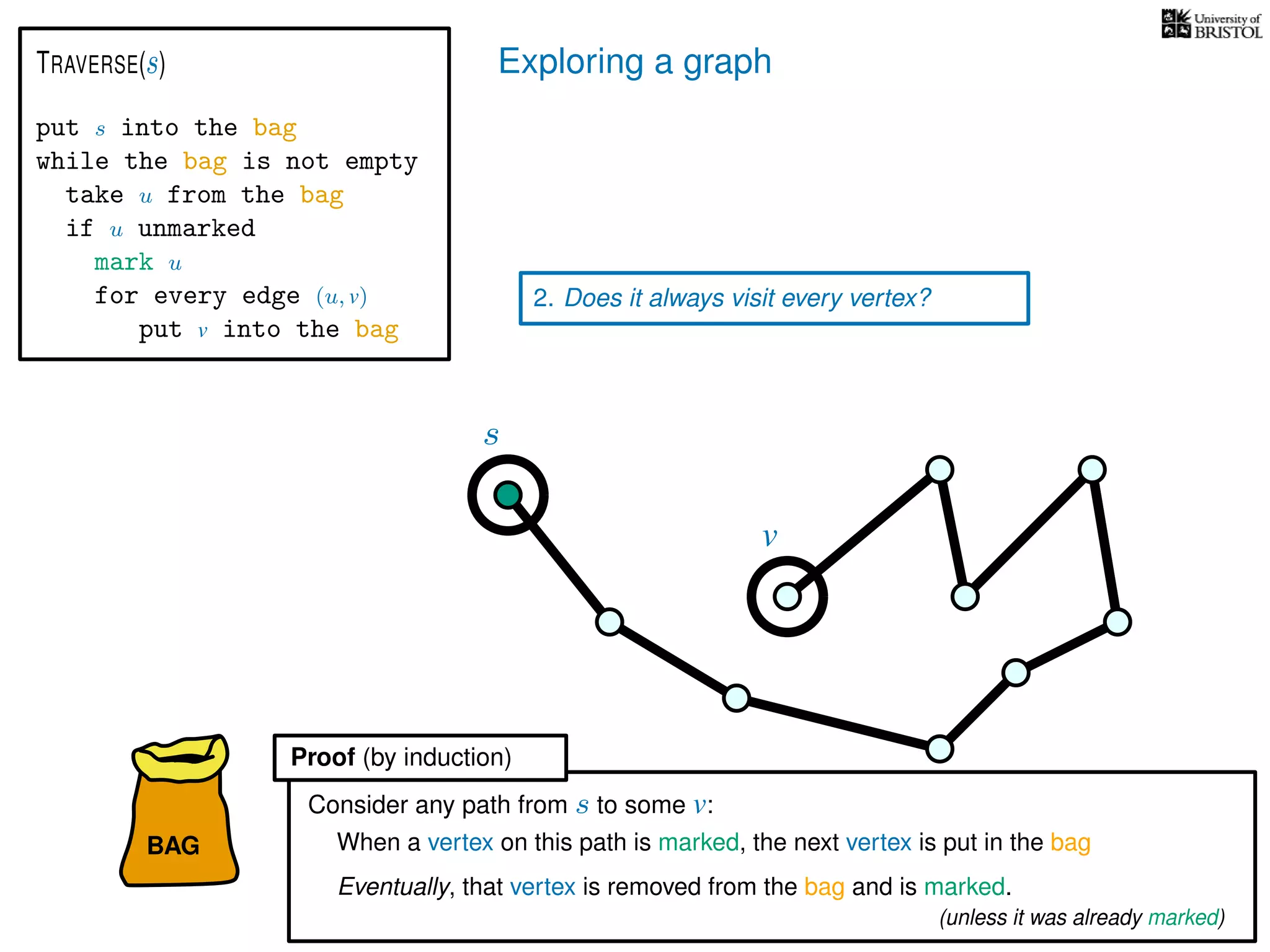
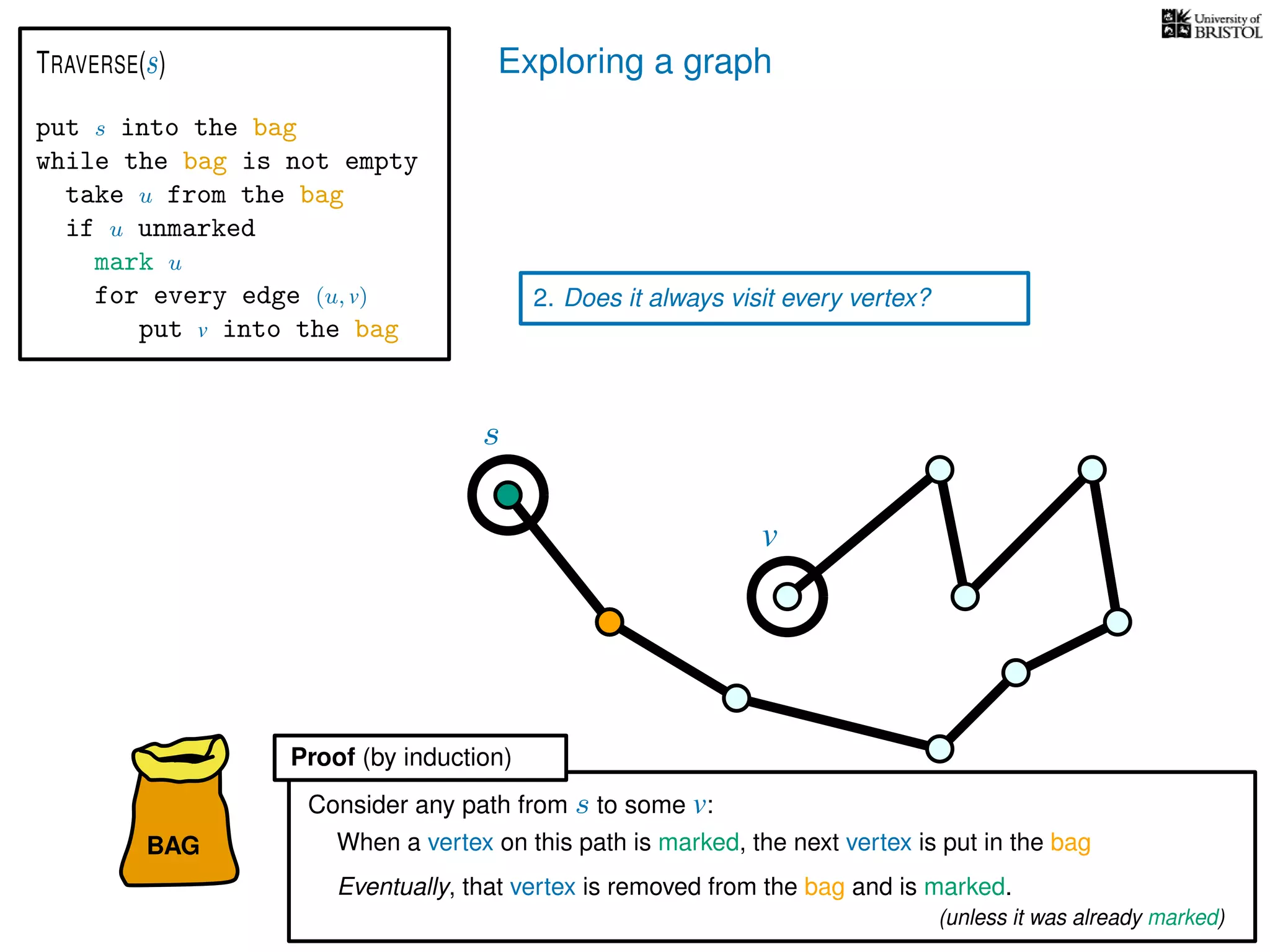
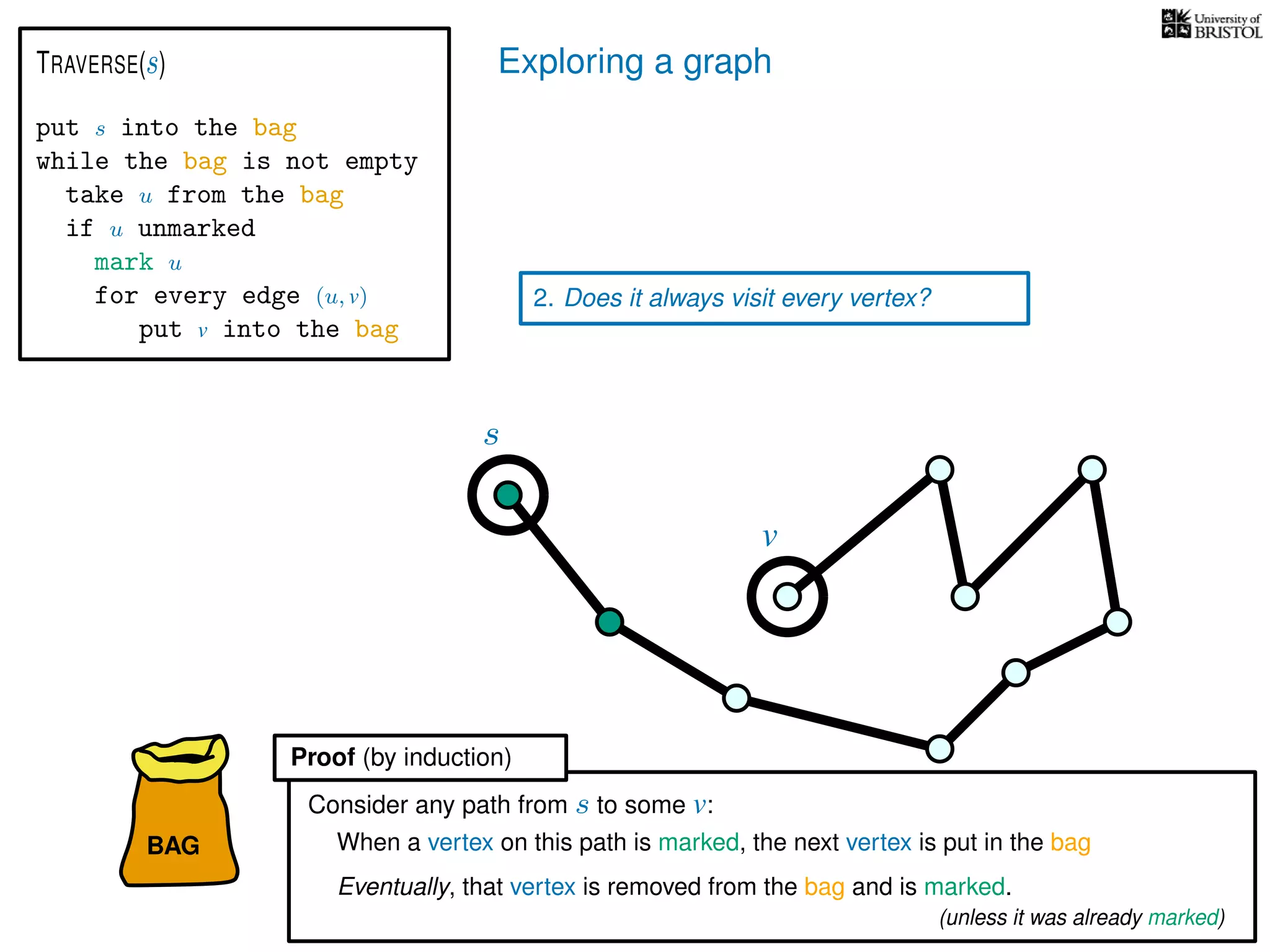
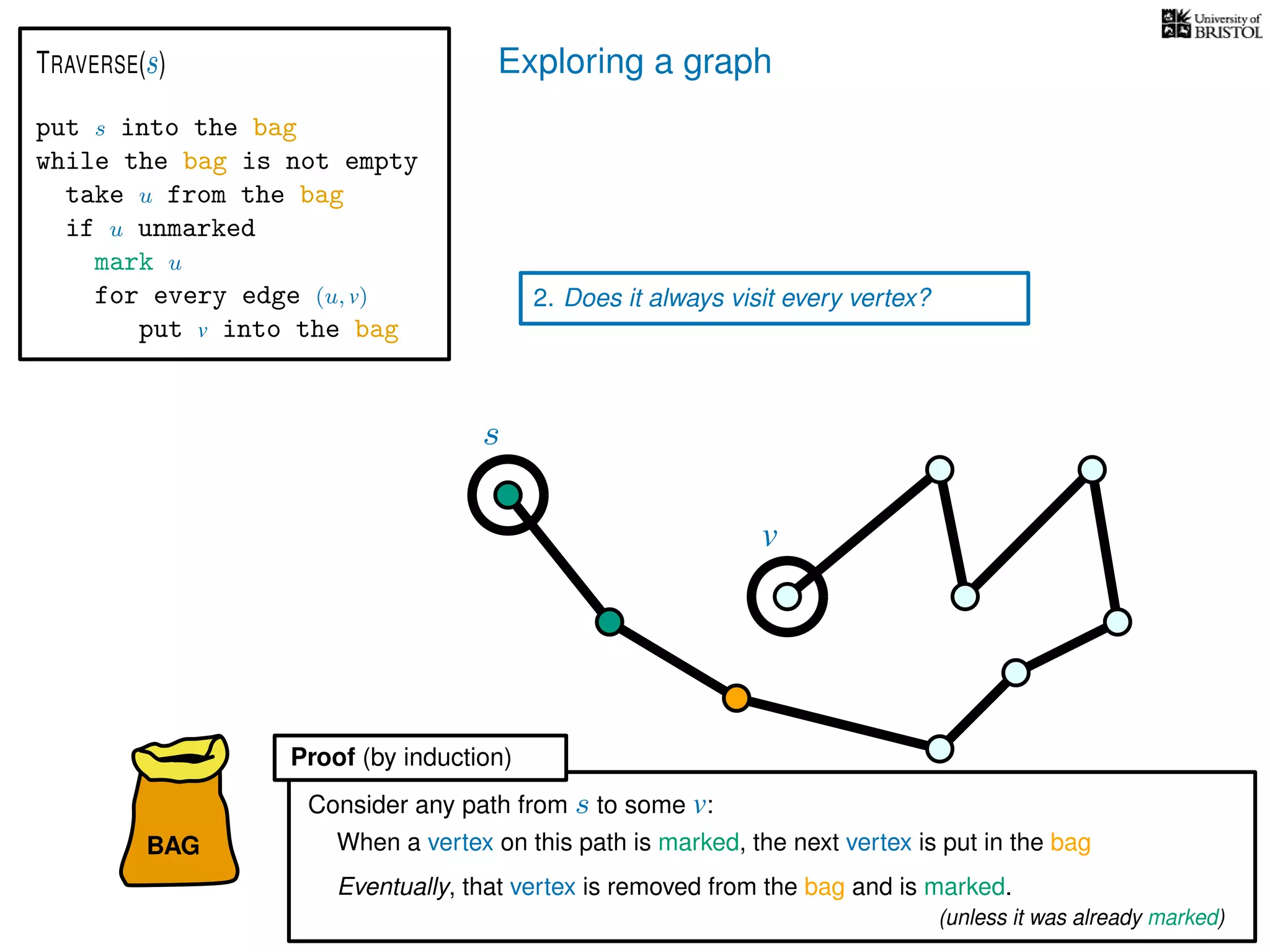
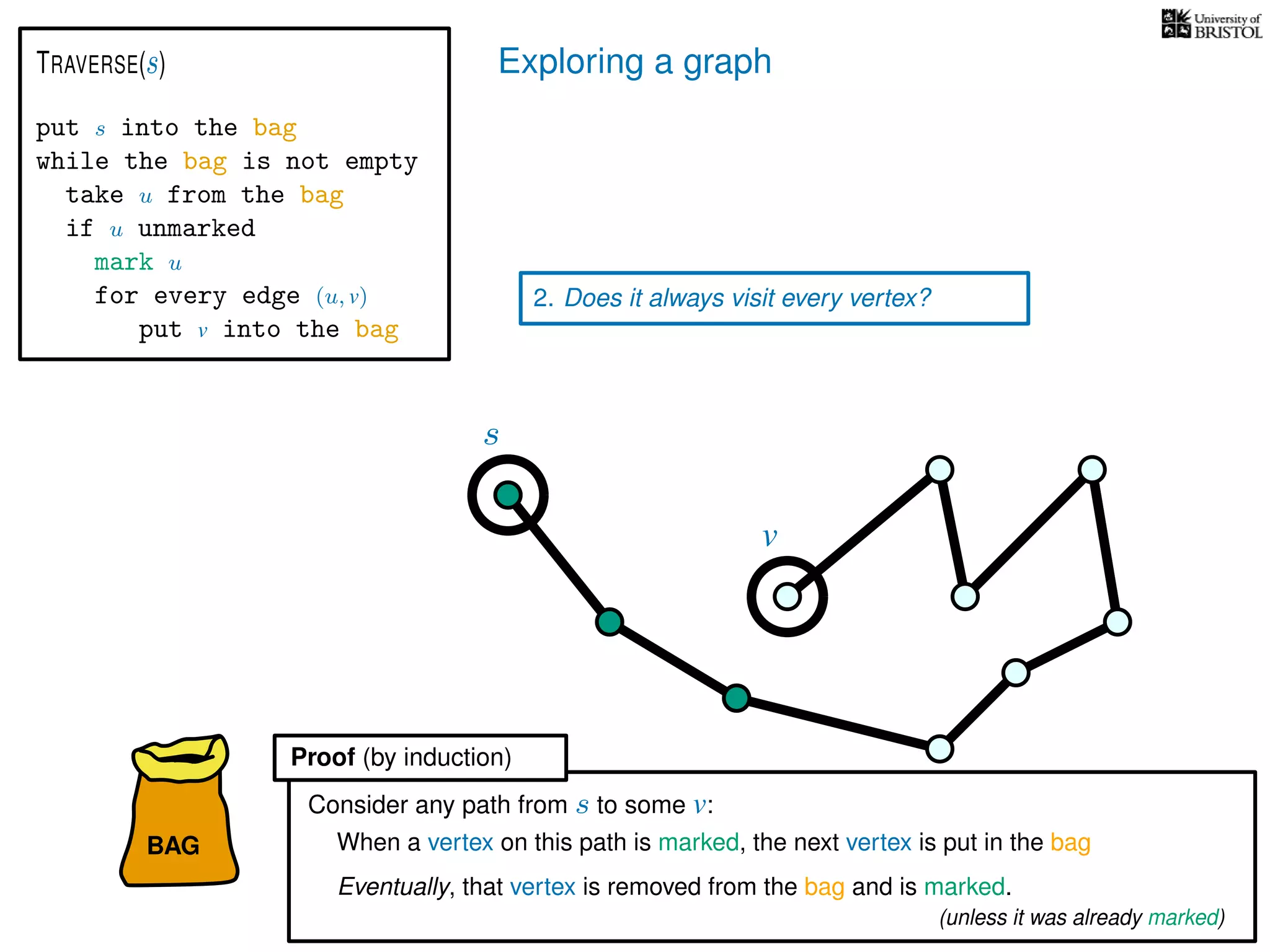
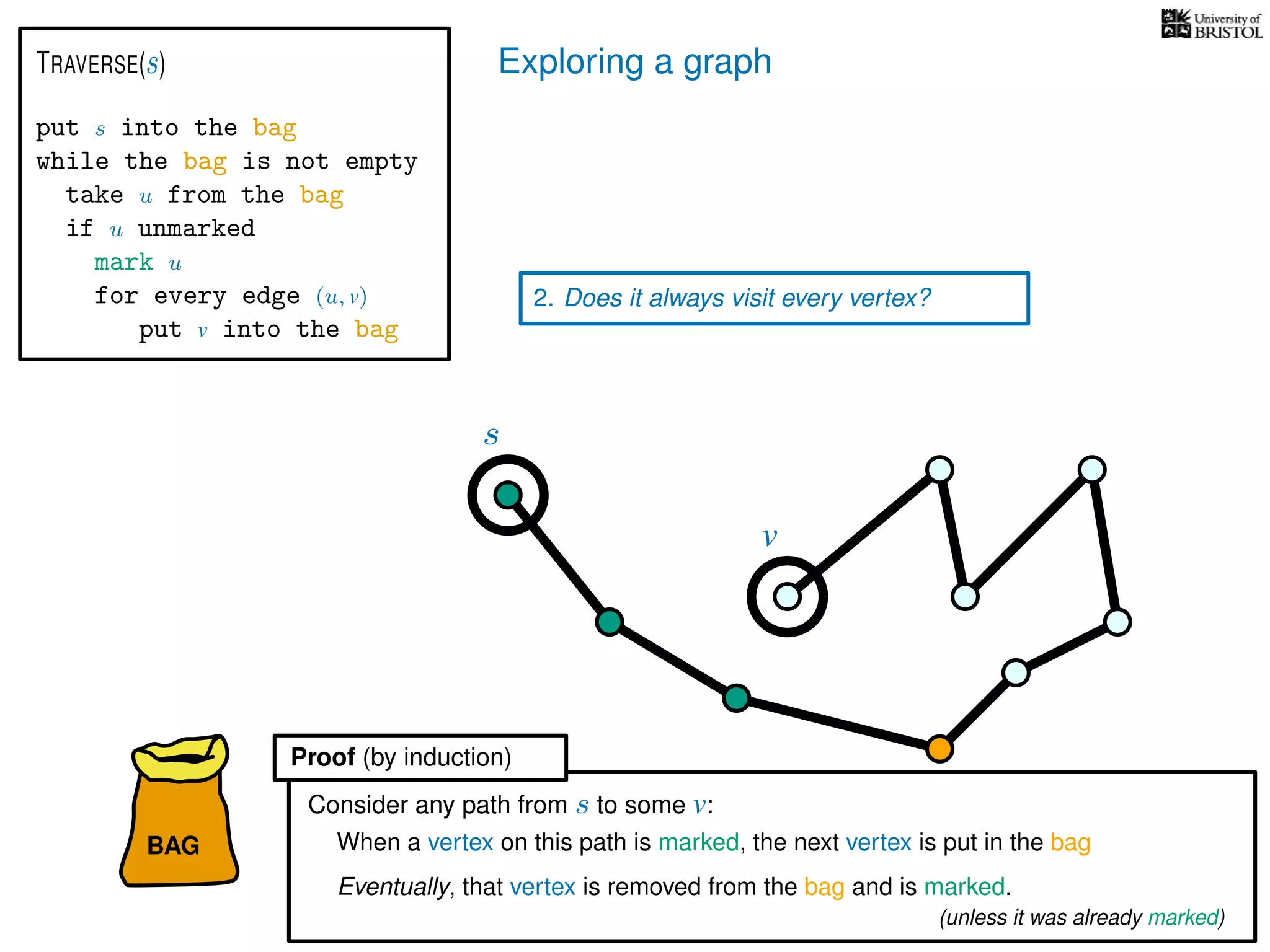
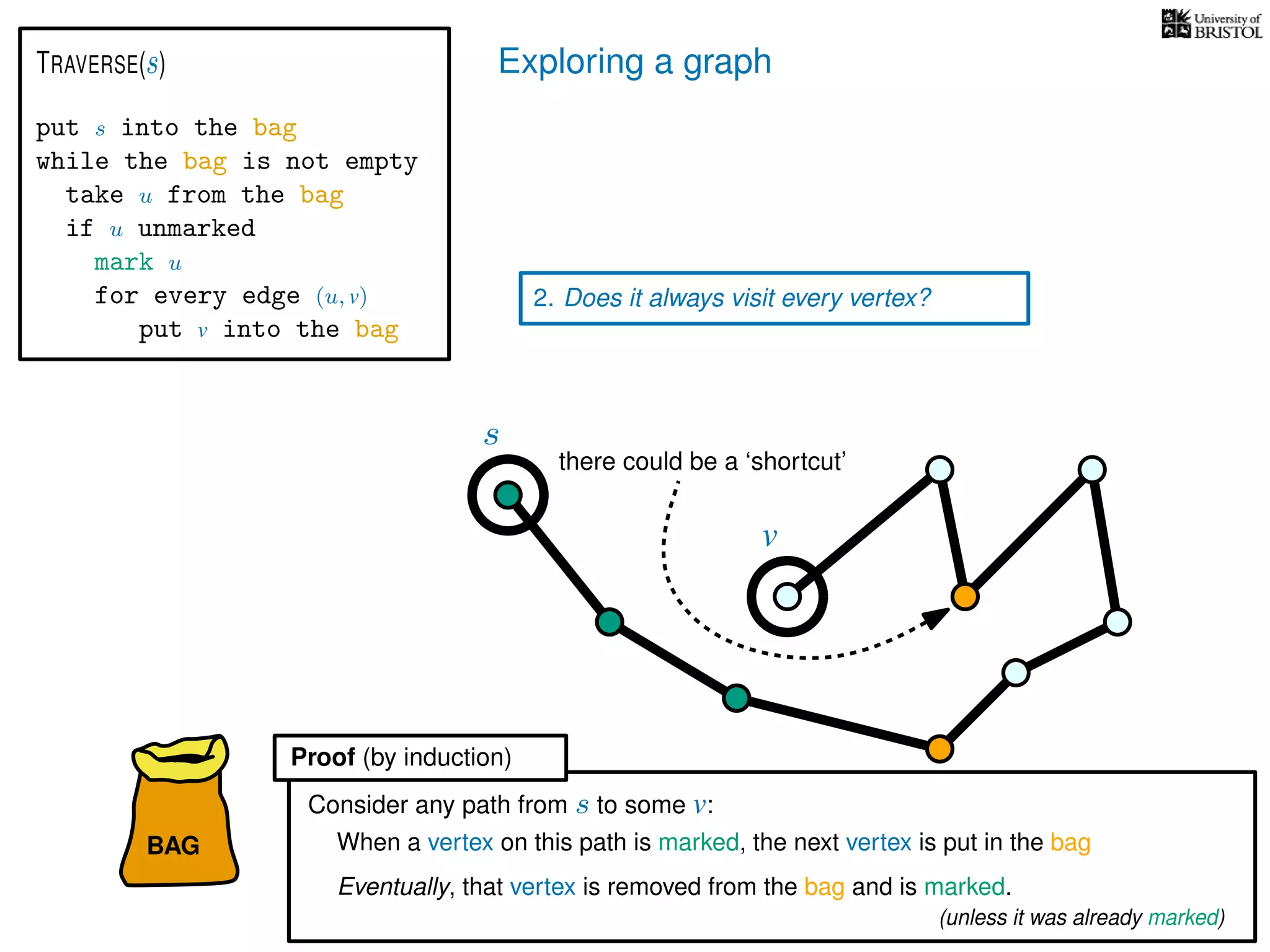
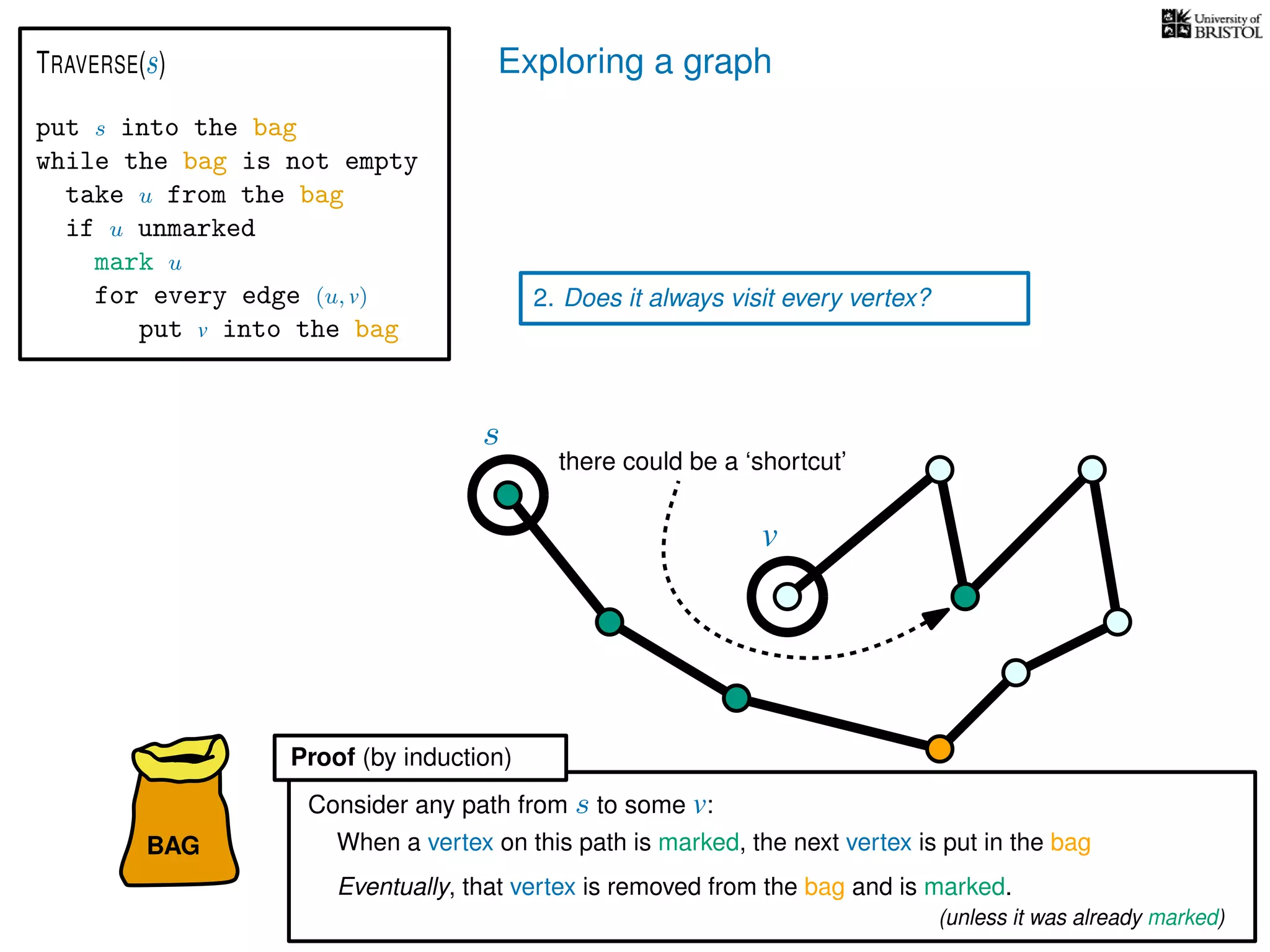
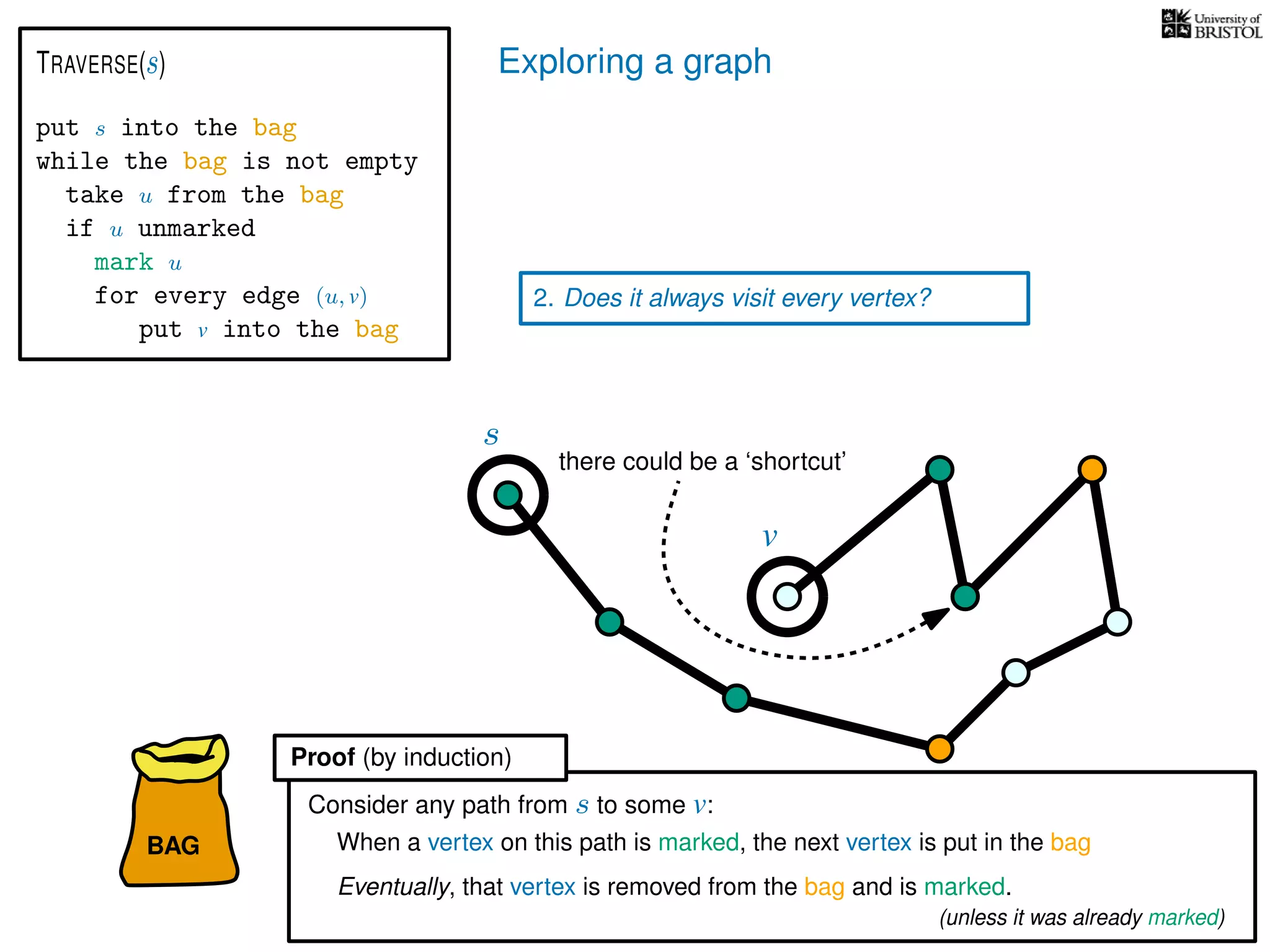
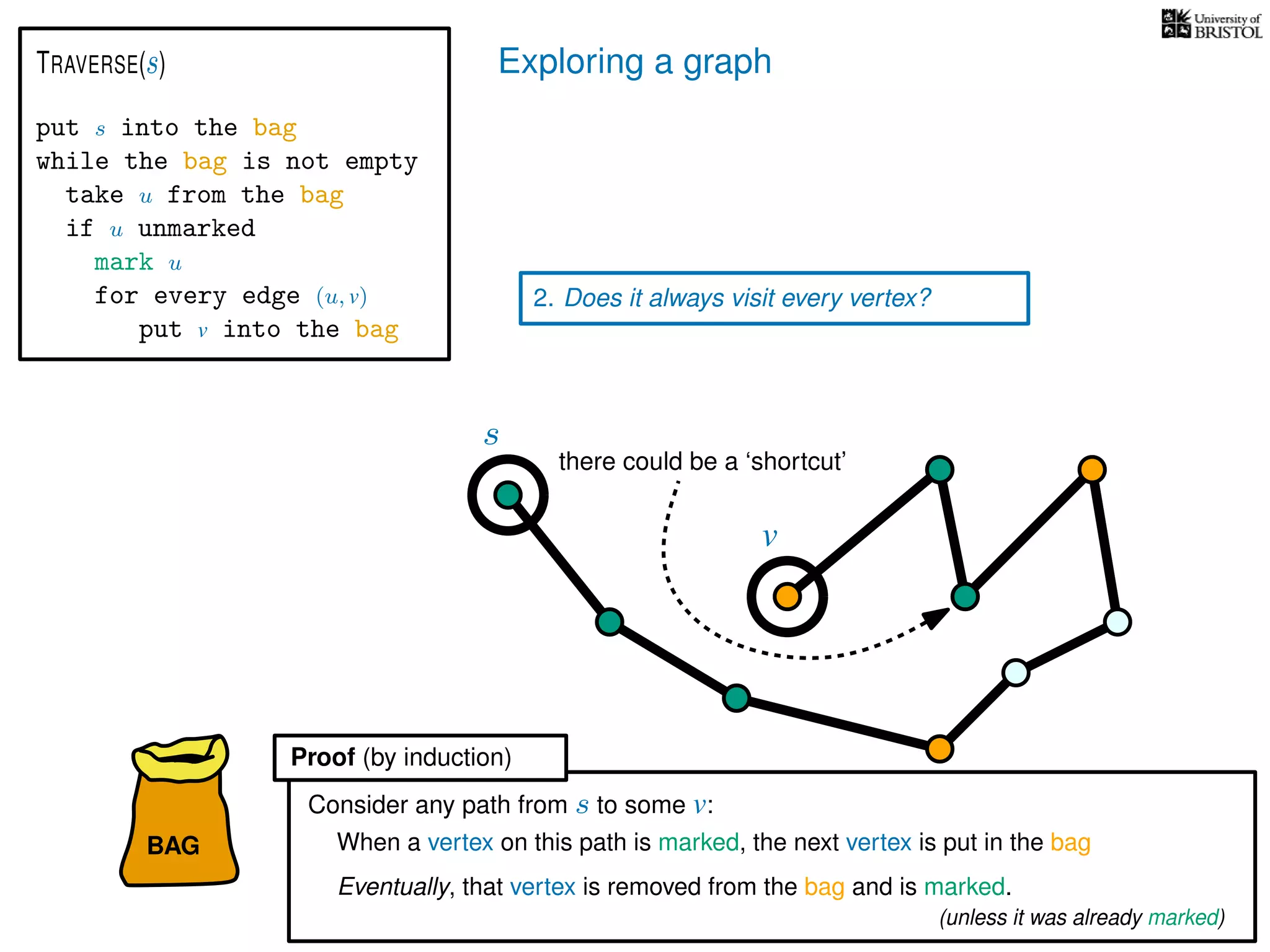
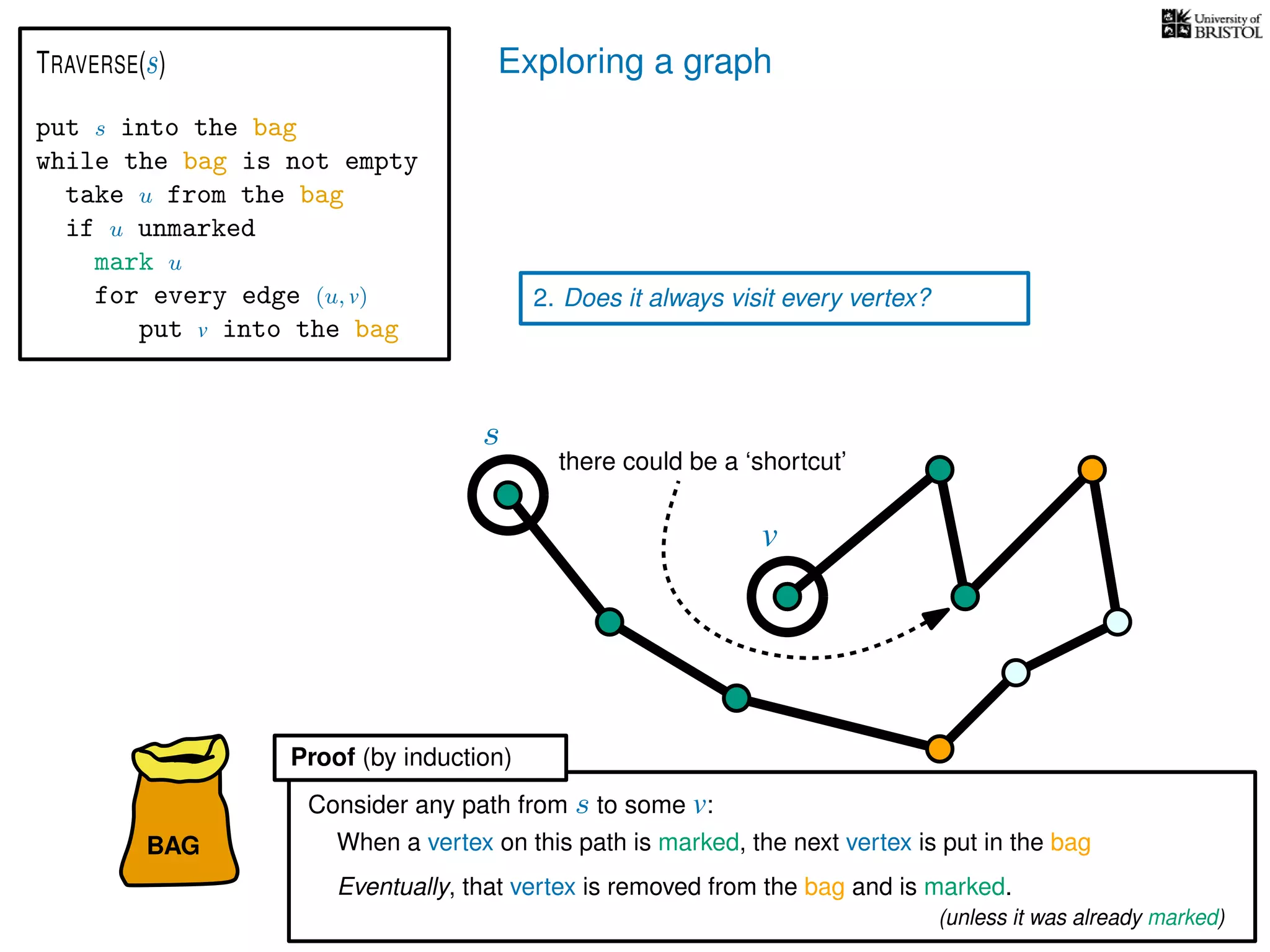
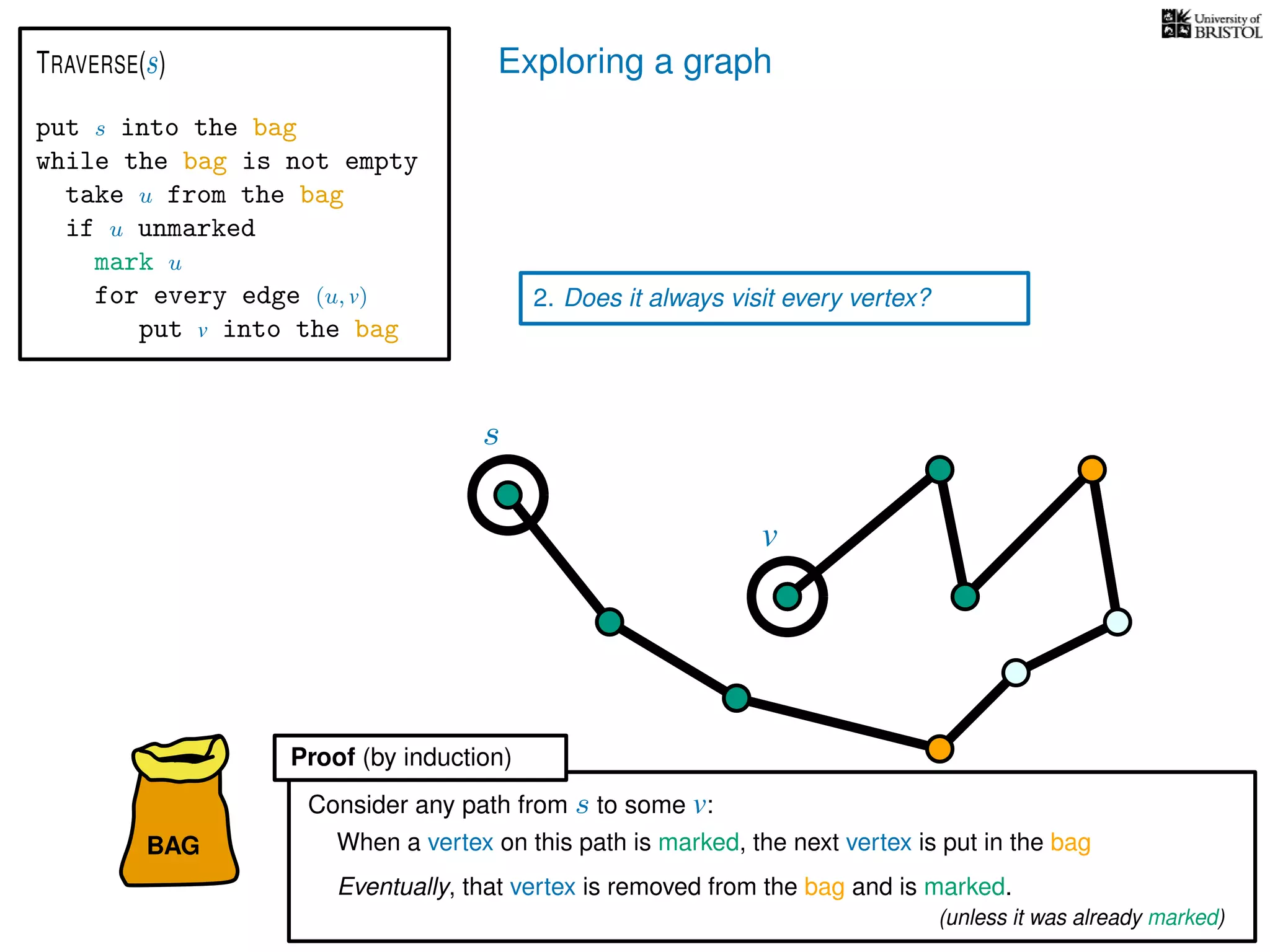
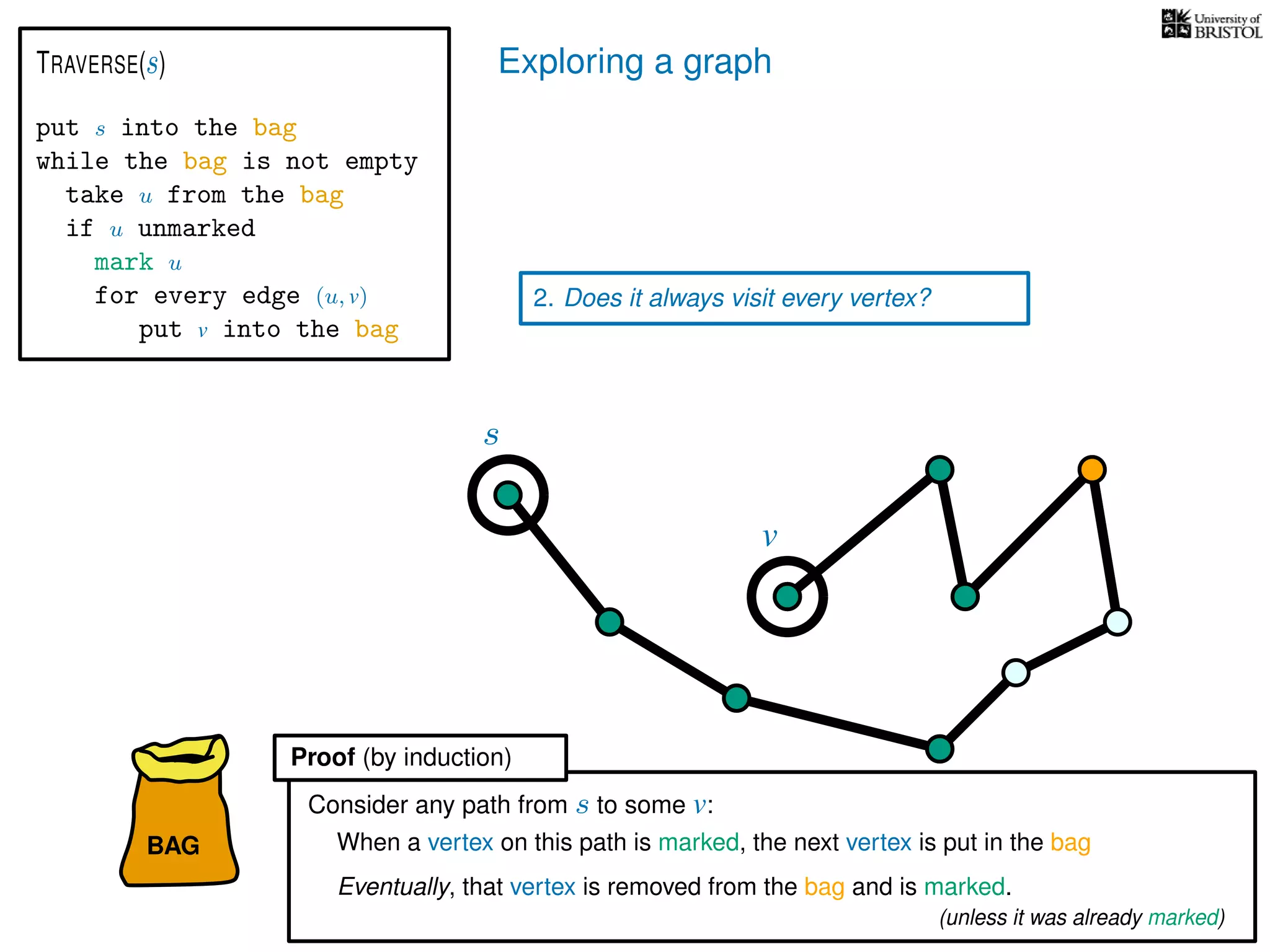
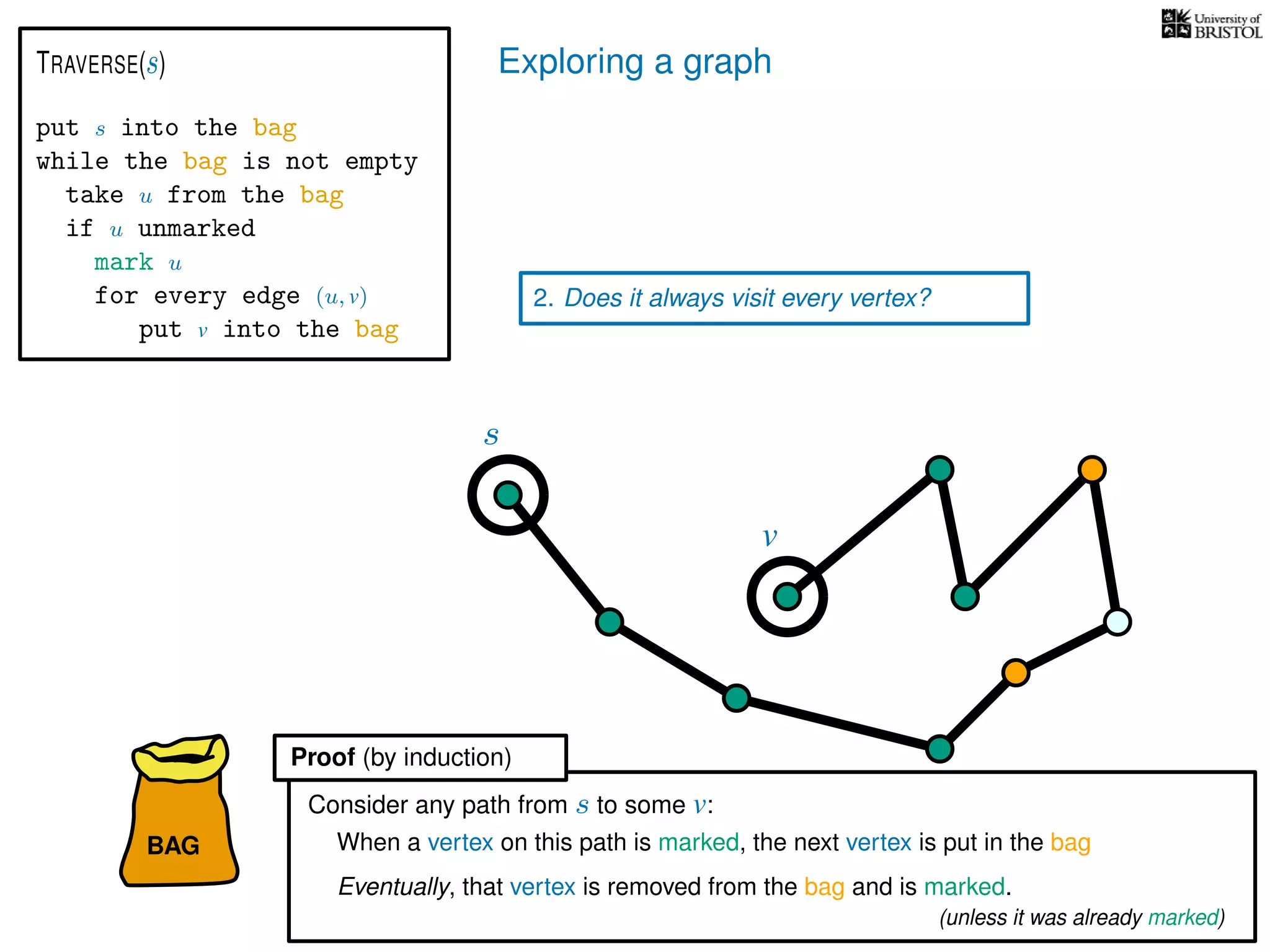
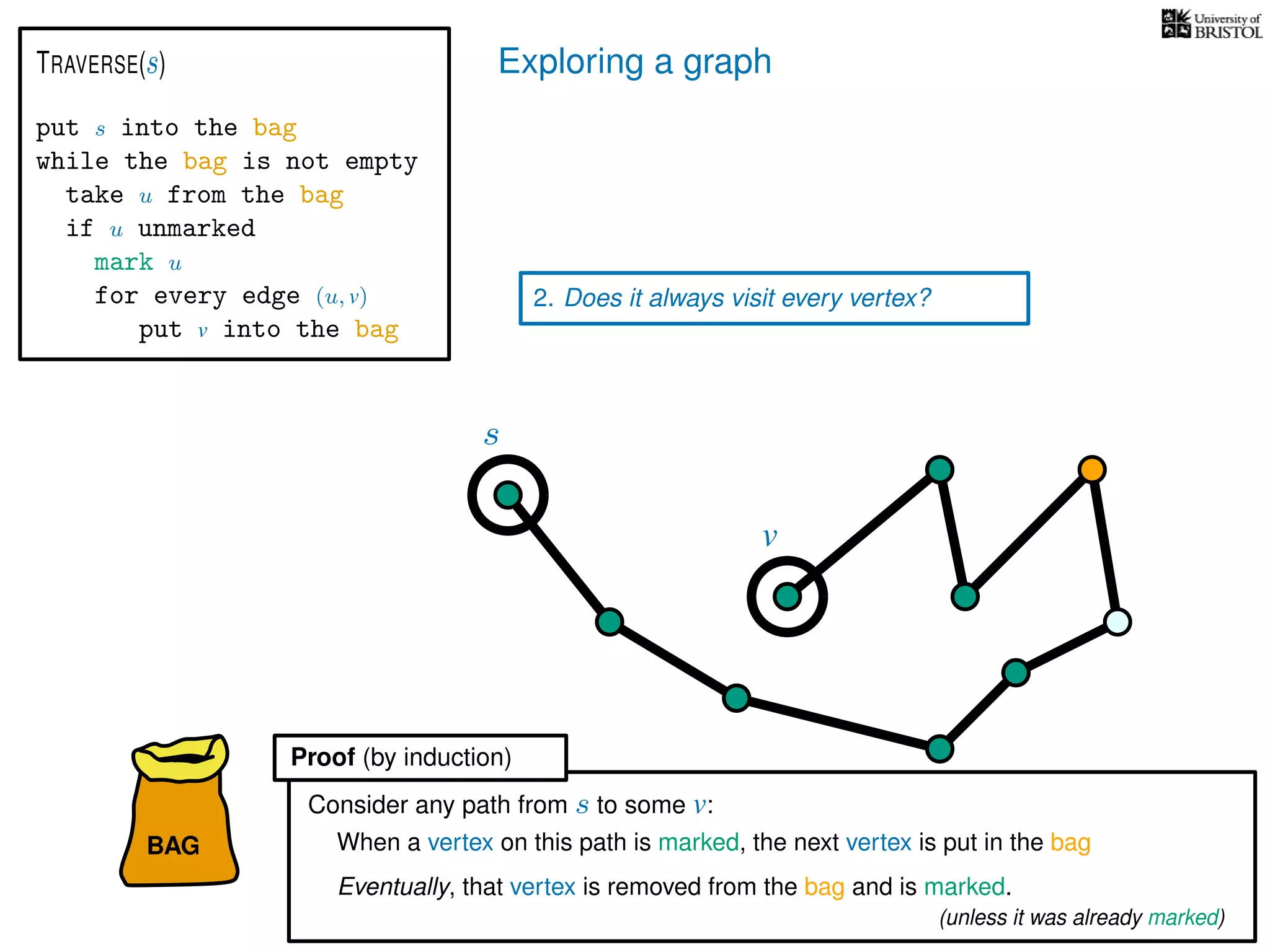
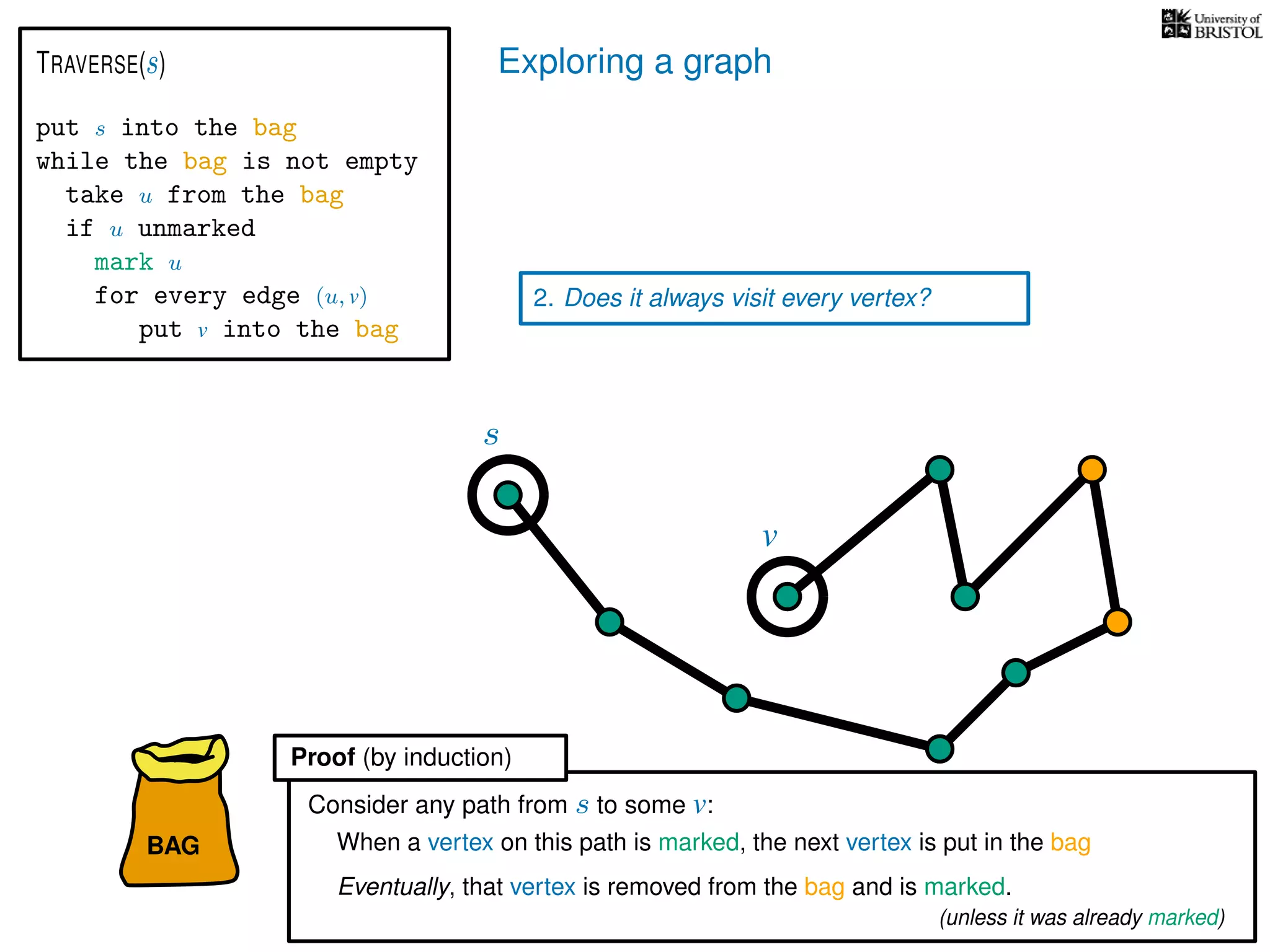
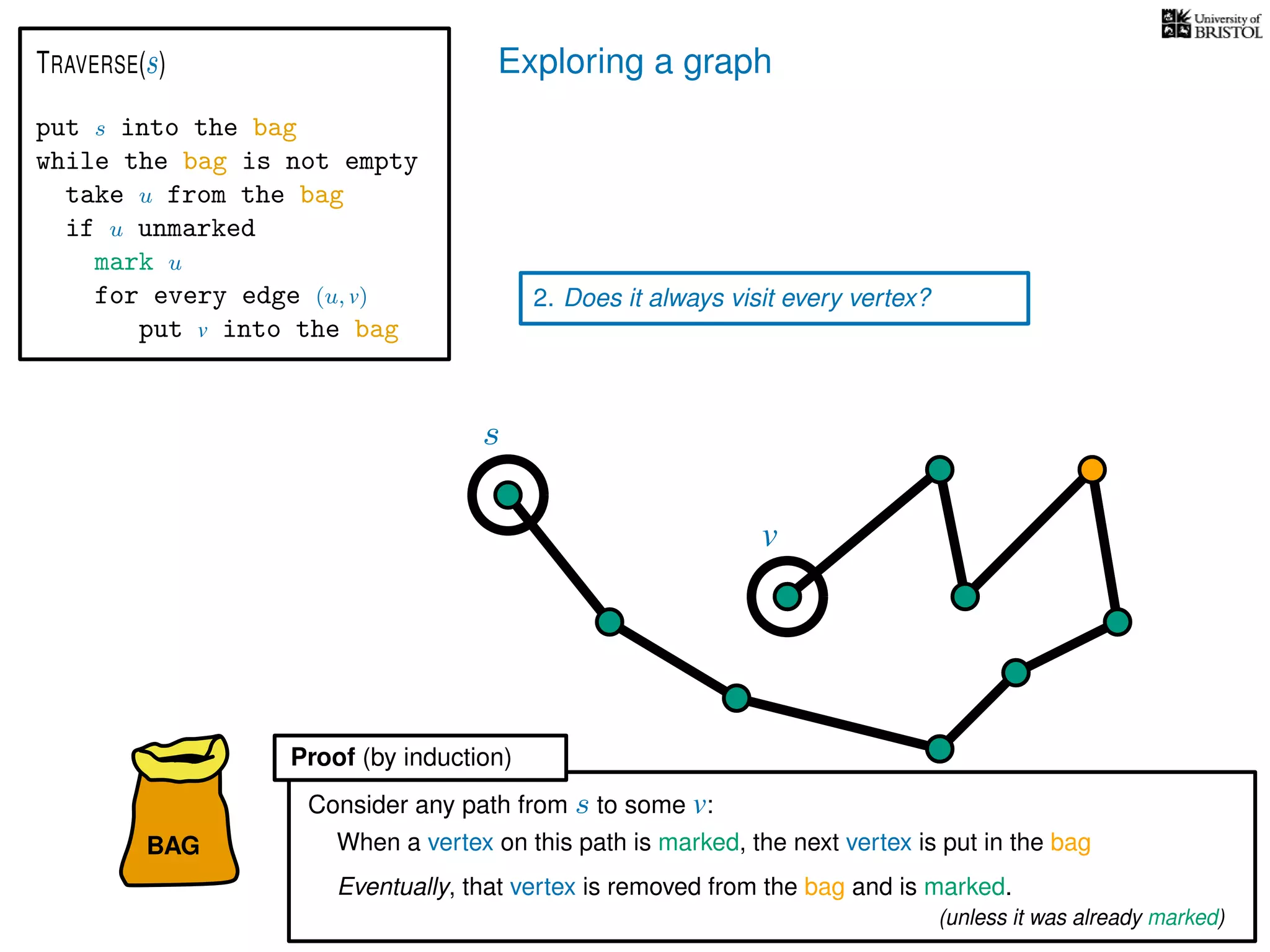
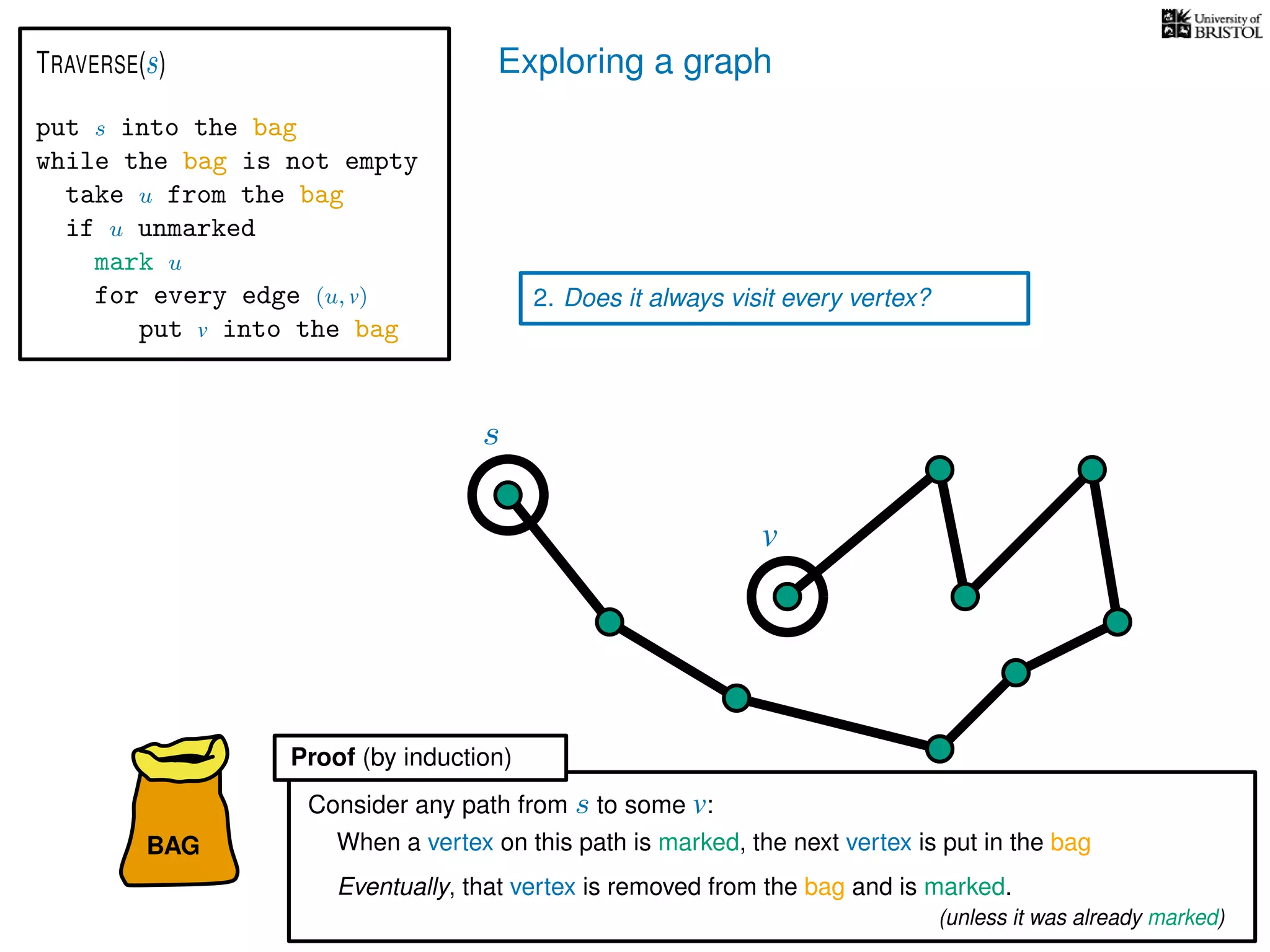
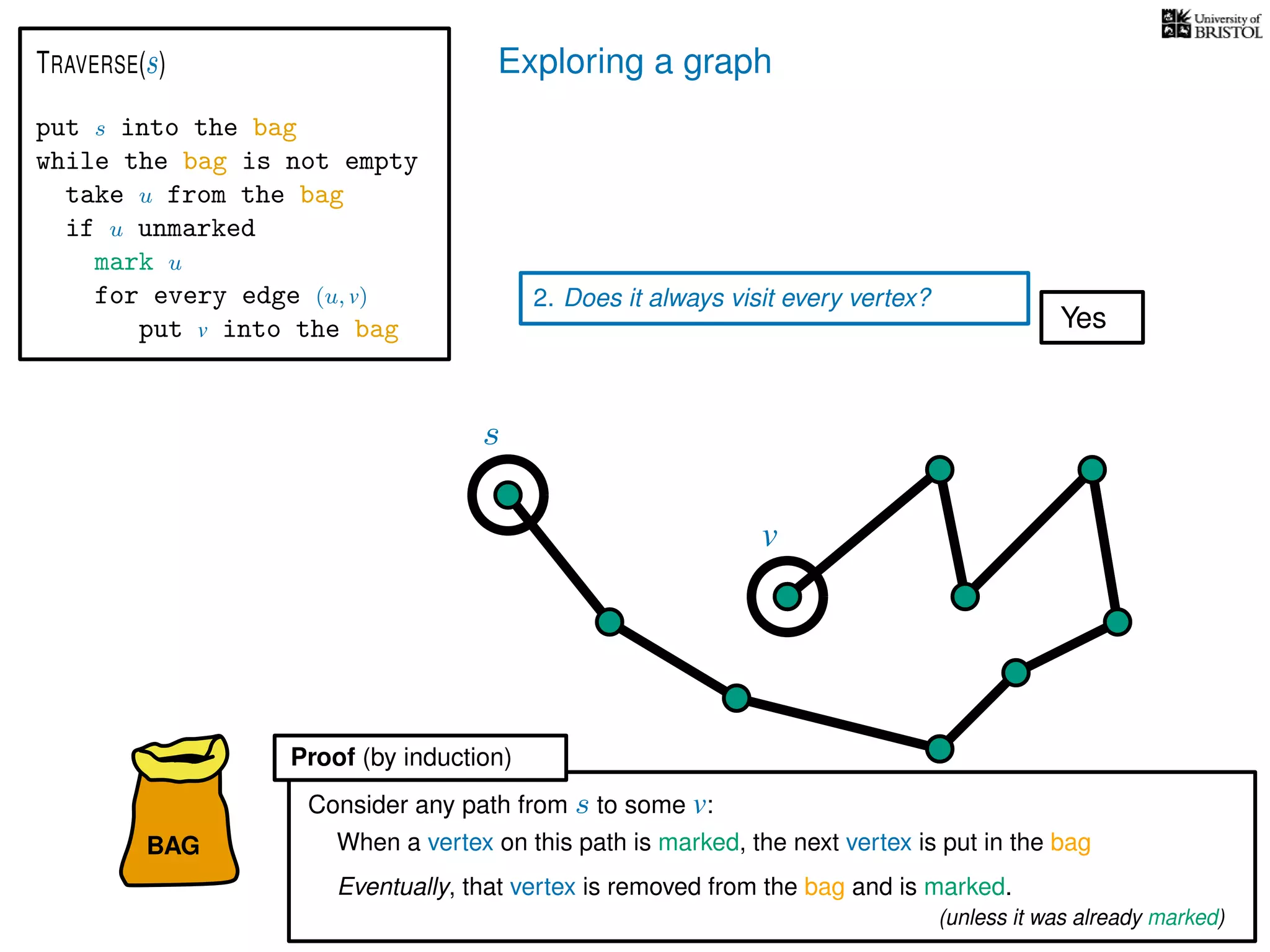
2. Does it always visit every vertex?
Yes
Yes
3. How fast is it? (in the worst case)
Time complexity:
Assumption
(we’ll come back to this)
(store an array where mark[u] = 1 iff u is marked)
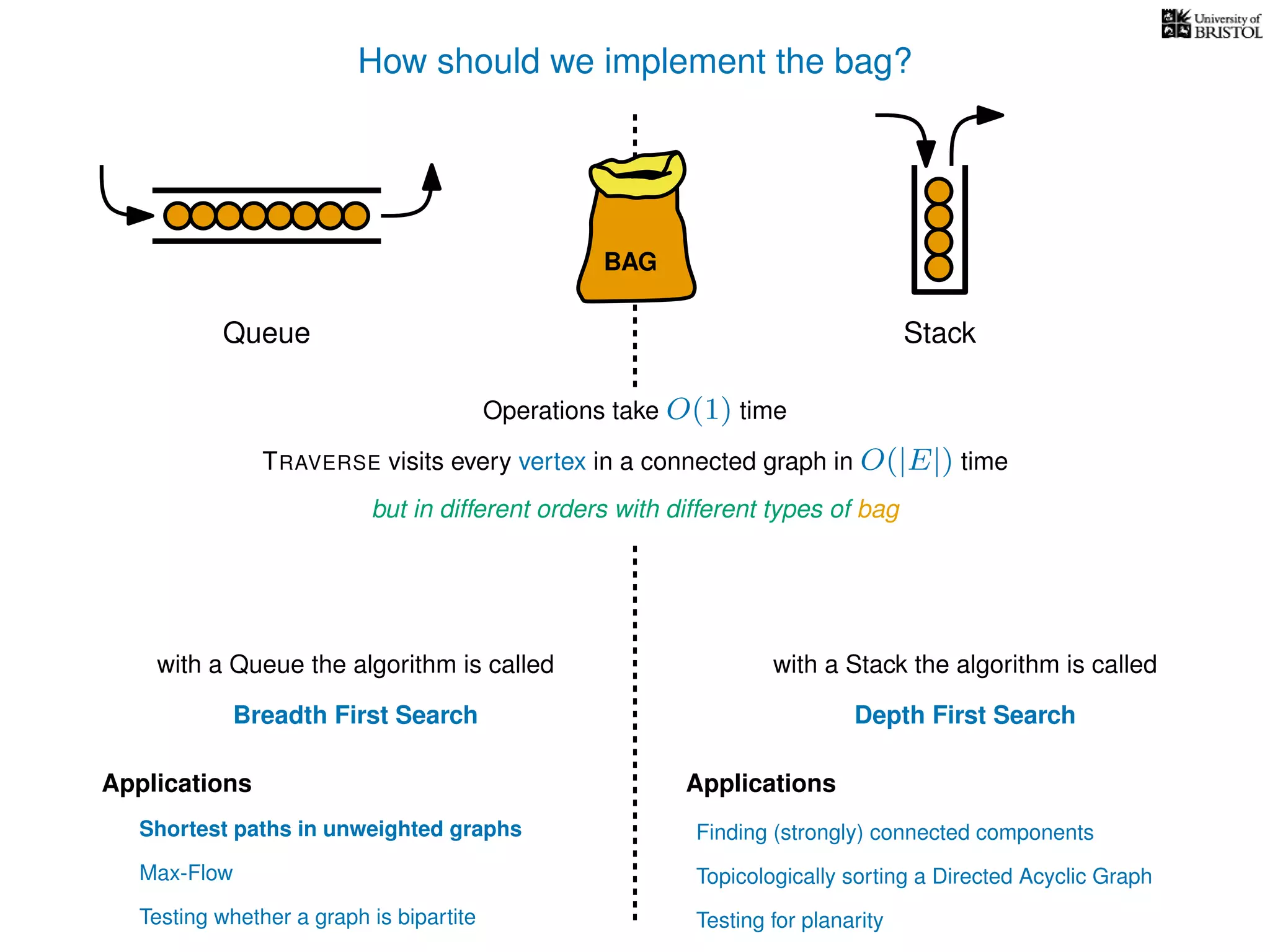
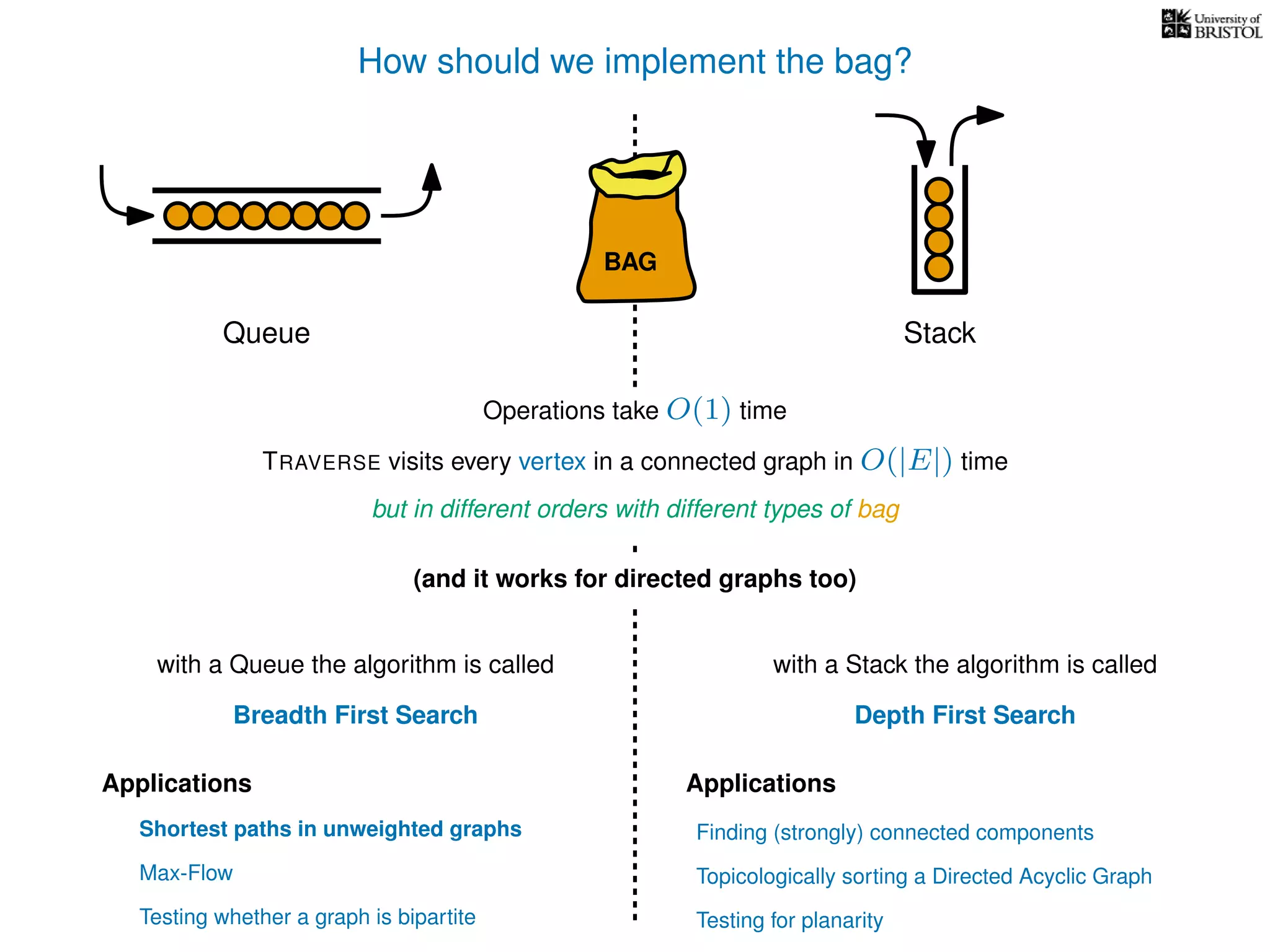
O(1) time every time we take from the bag
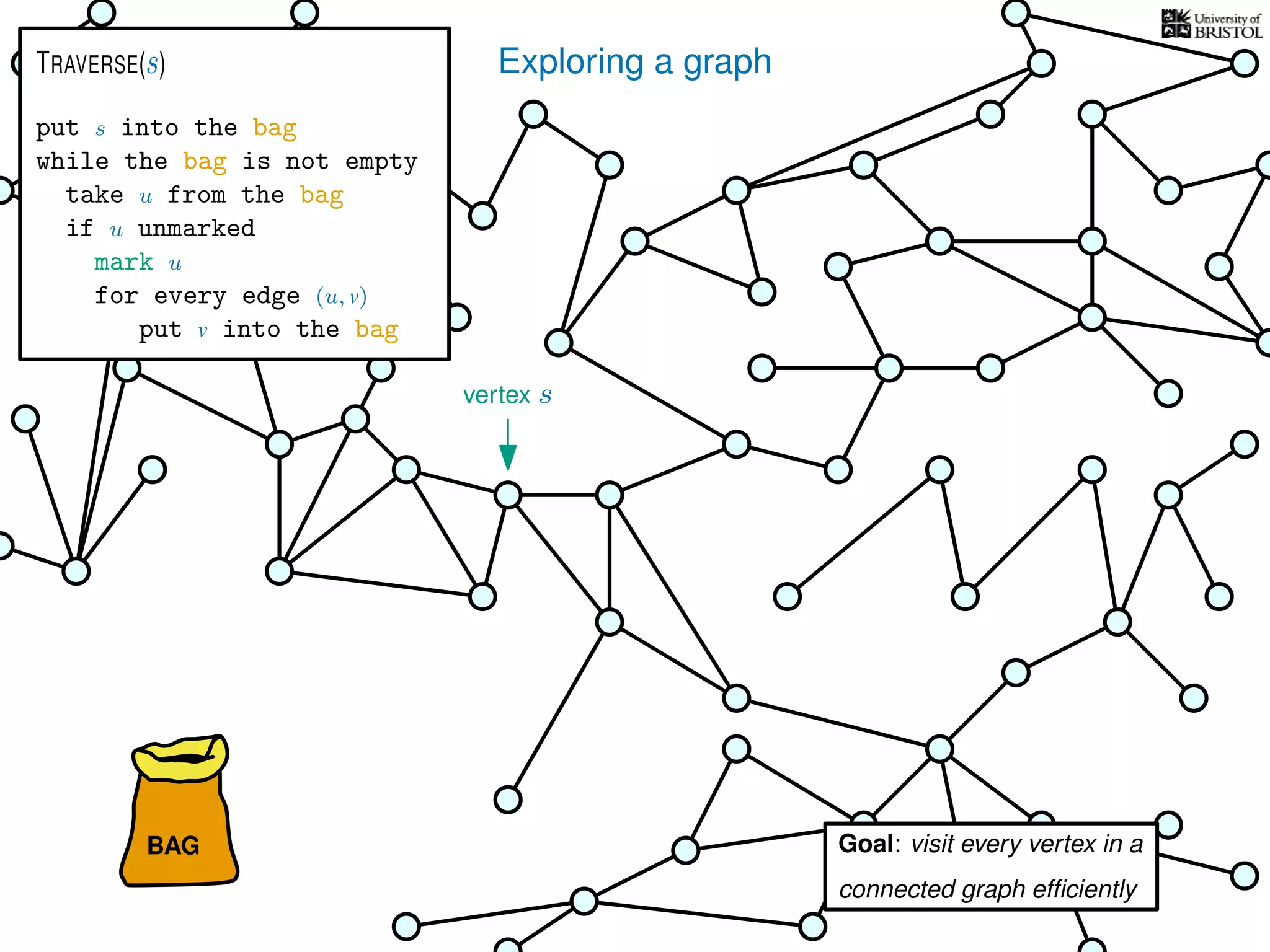
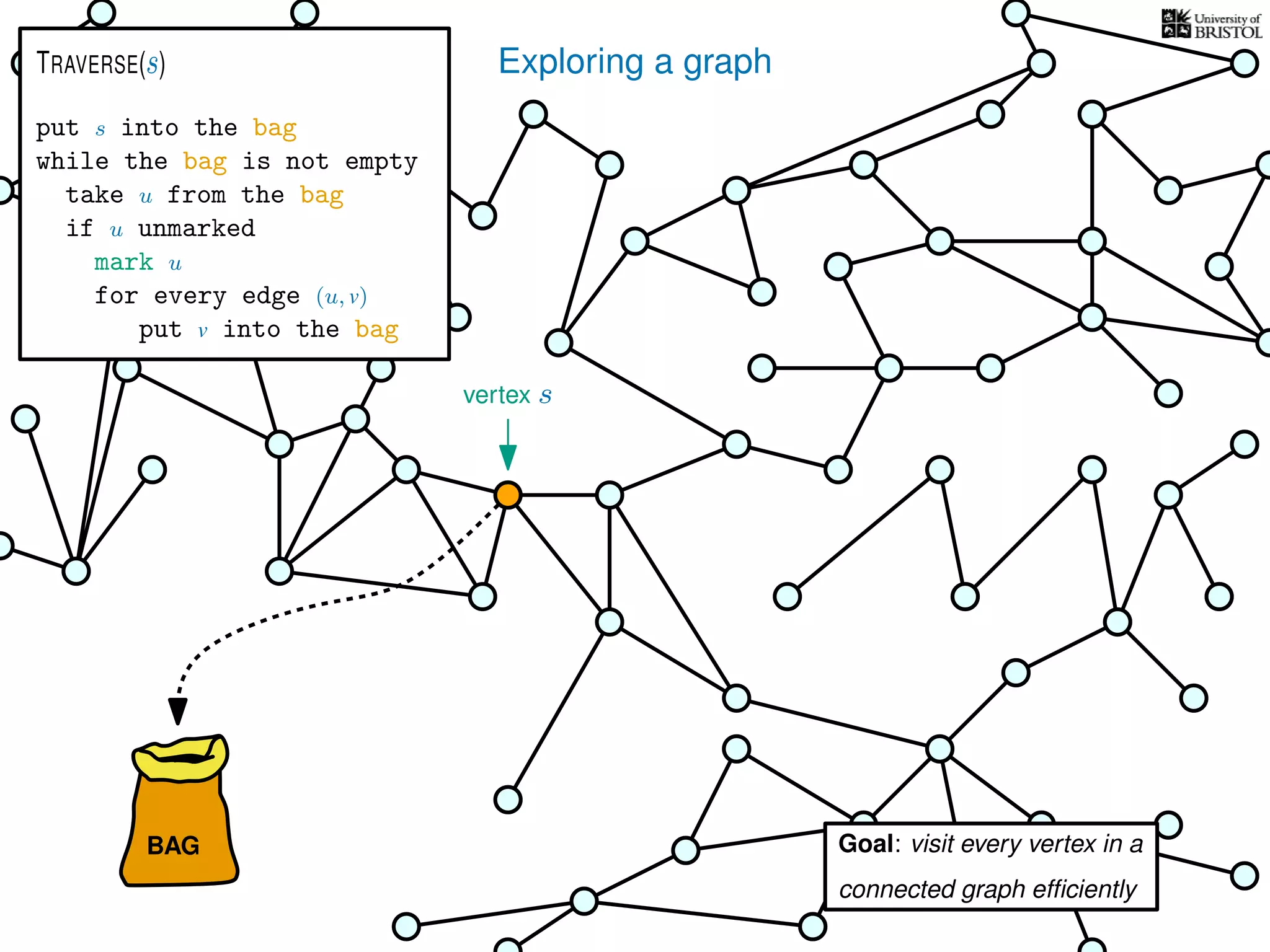
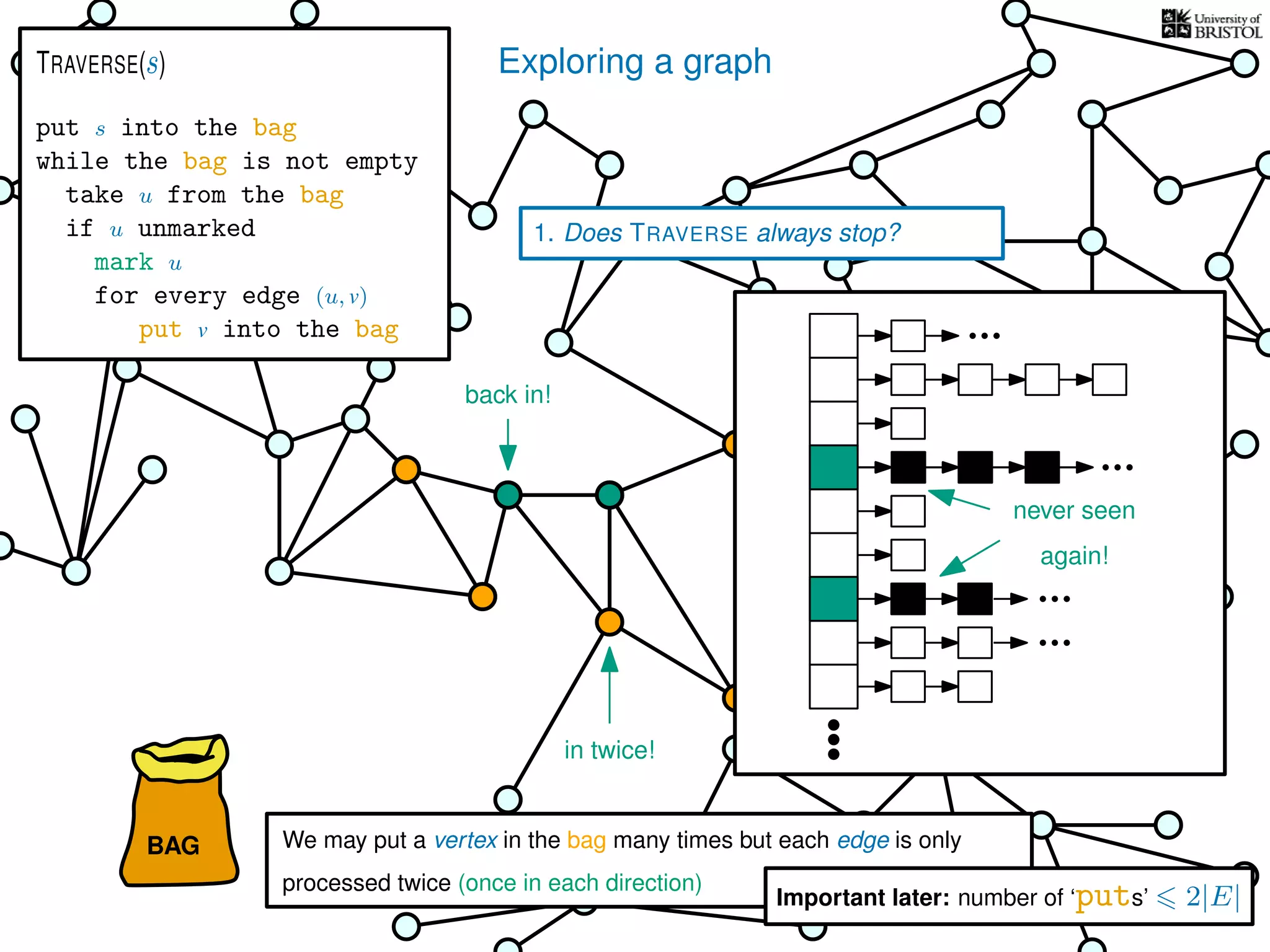
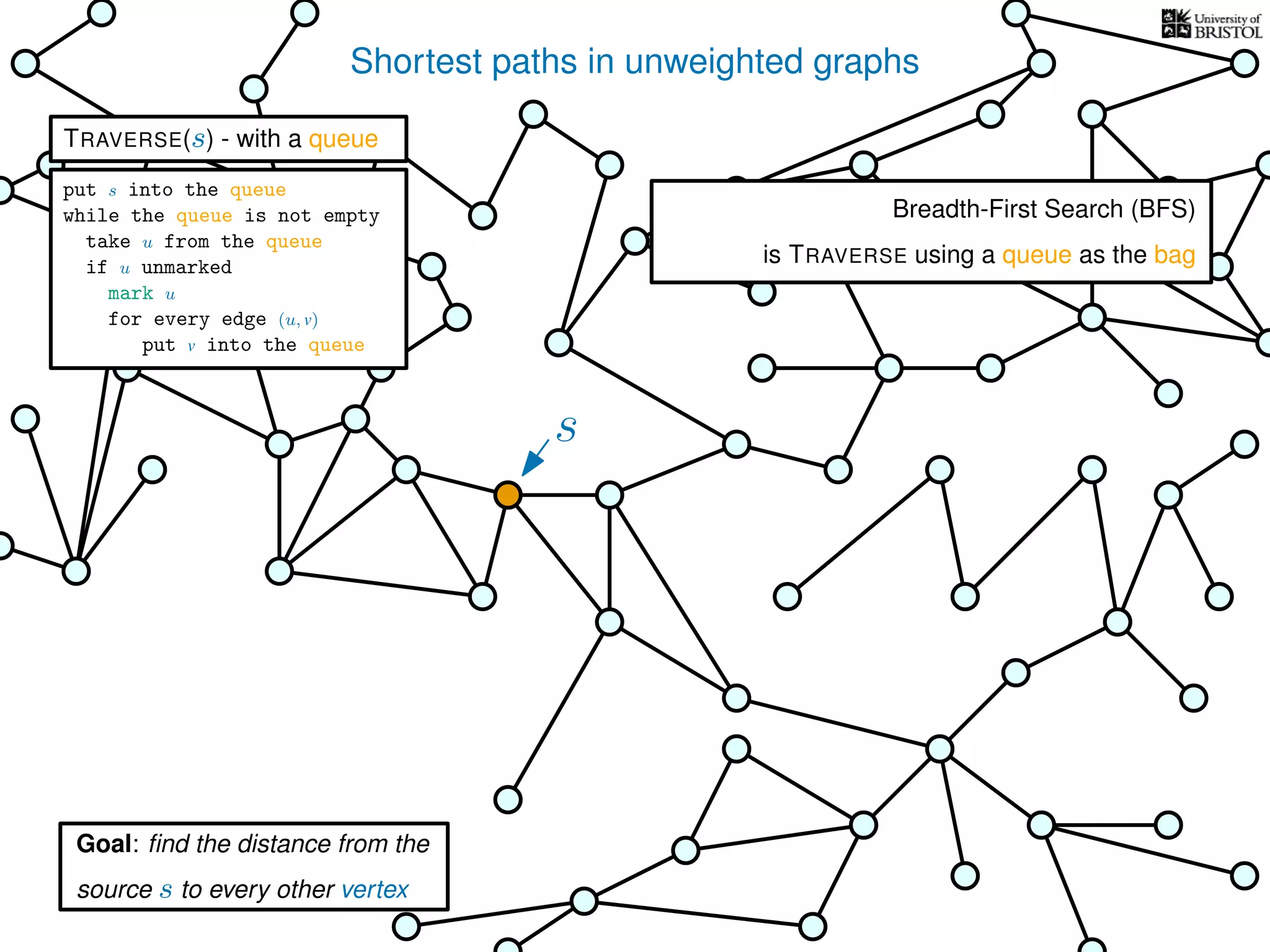
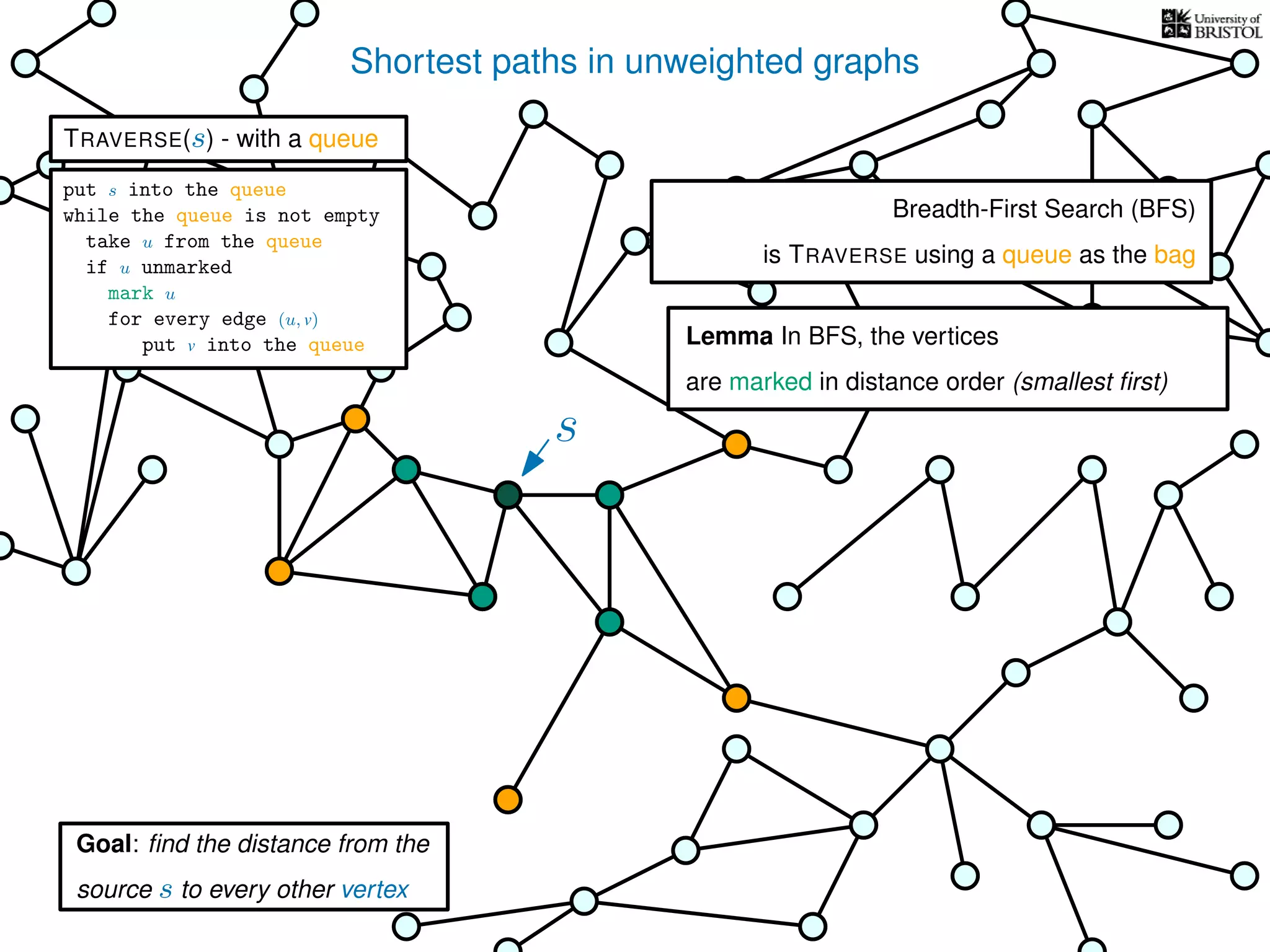
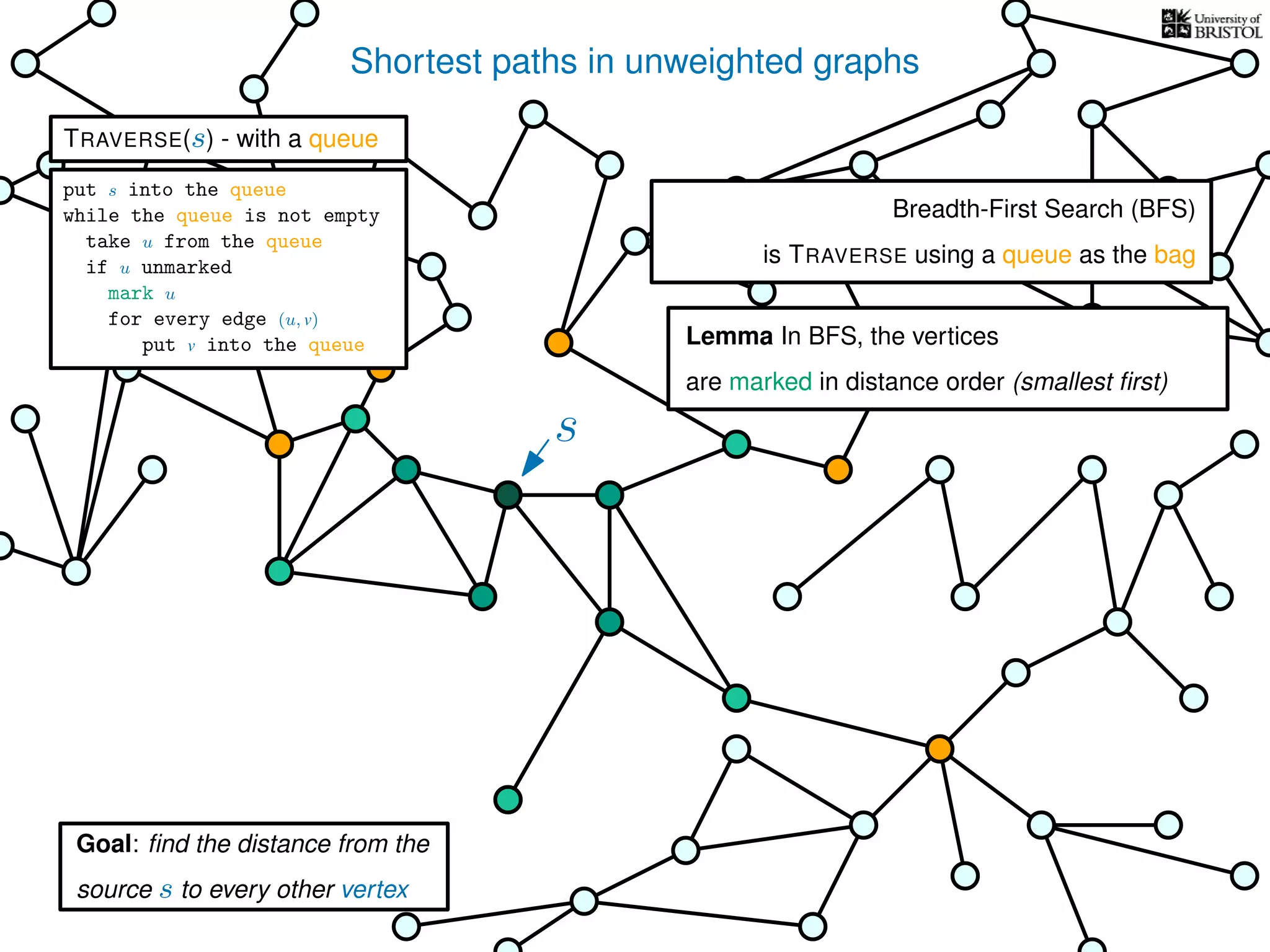
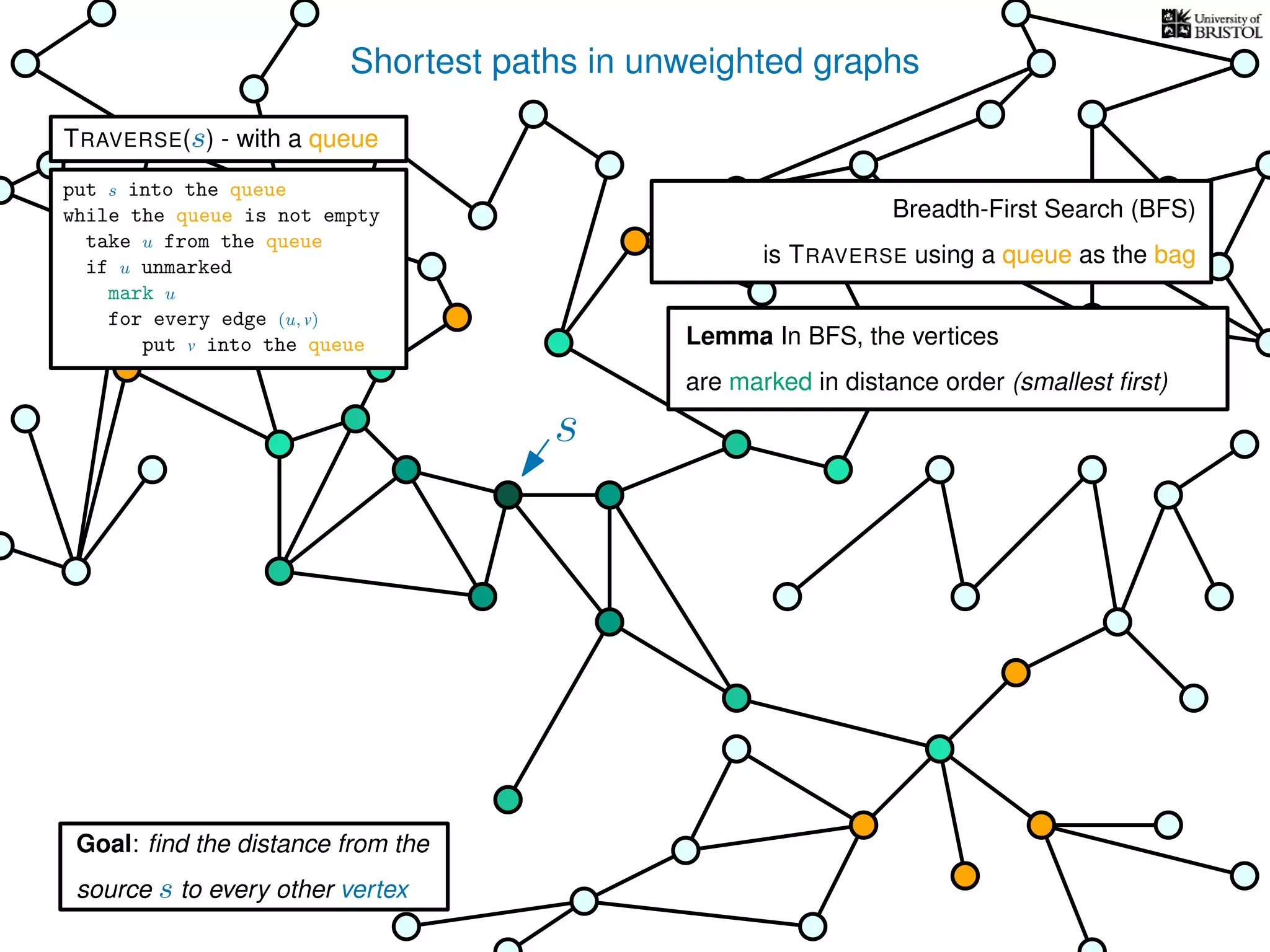
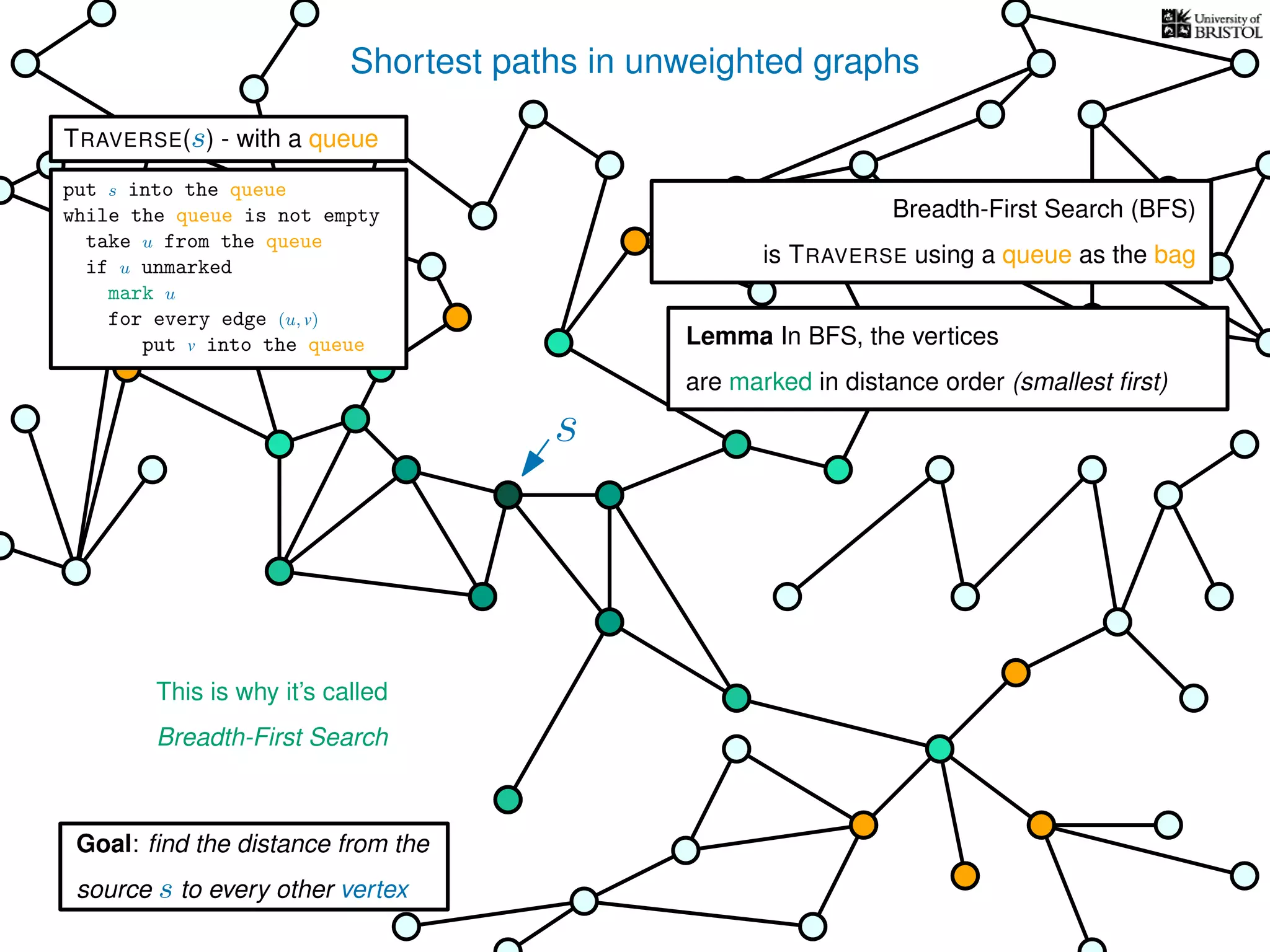
put s into the bag
while the bag is not empty
take u from the bag
if u unmarked
mark u
for every edge (u, v)
put v into the bag
TRAVERSE(s)
bag operations
take O(1) time
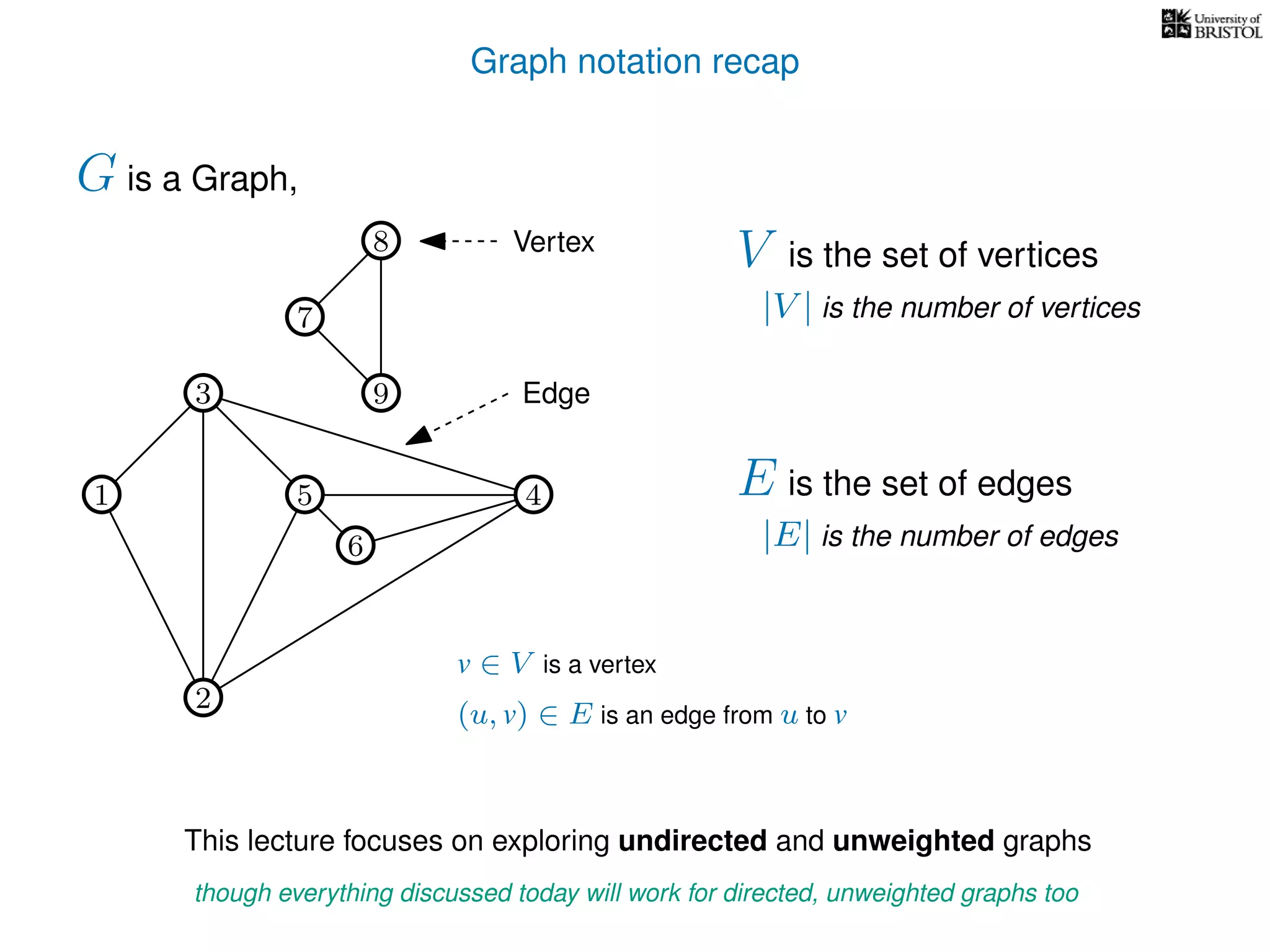
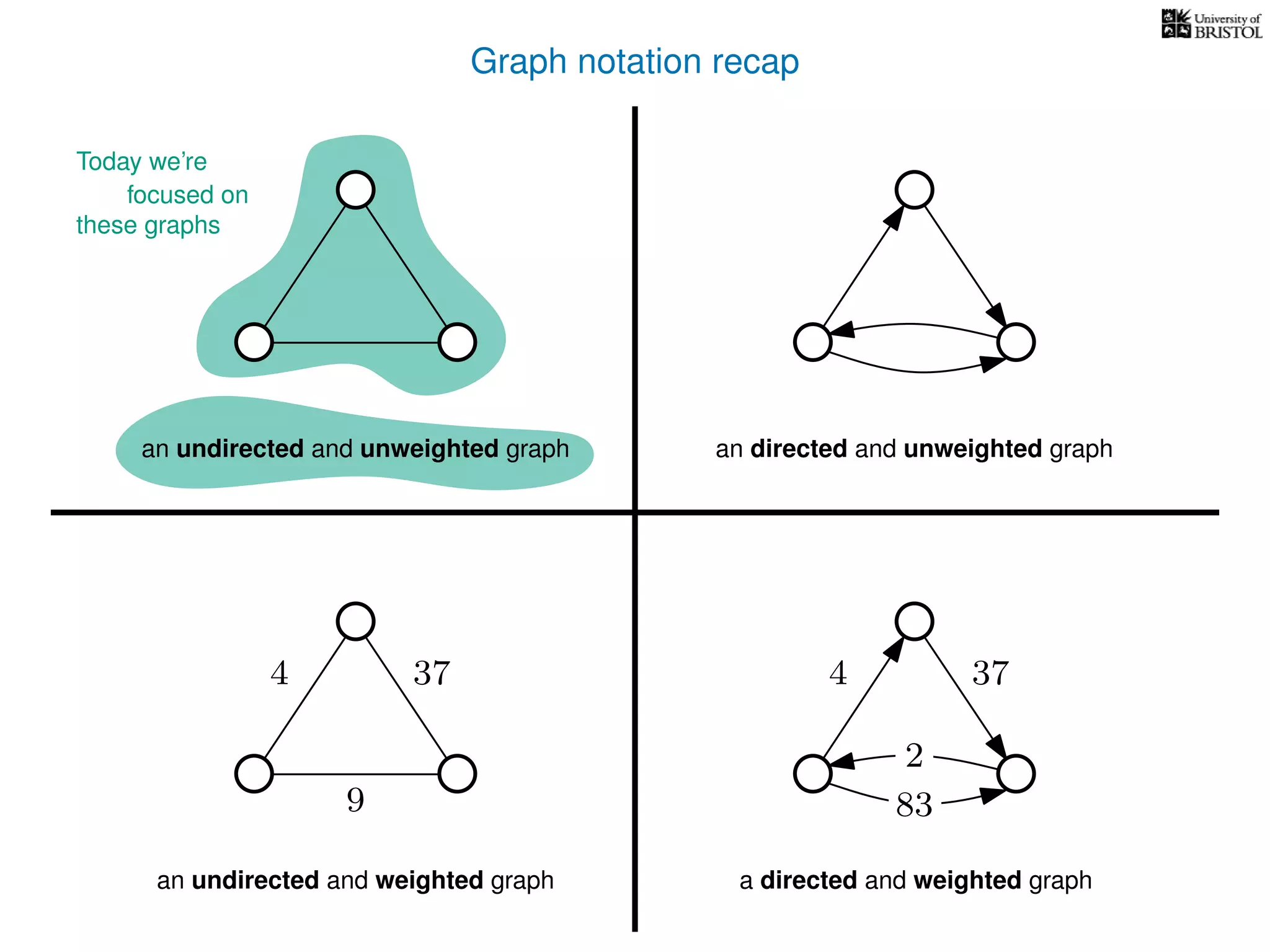
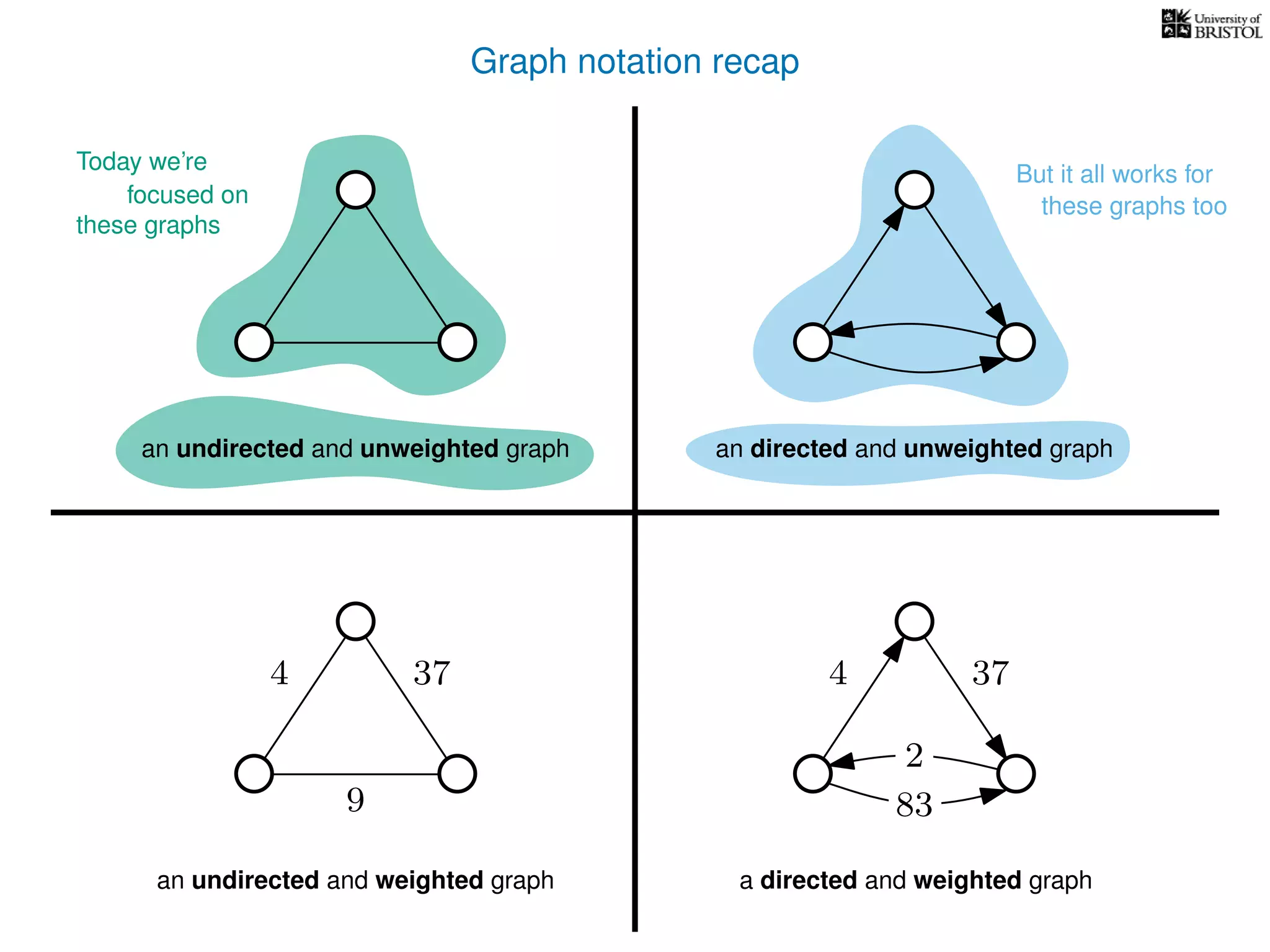
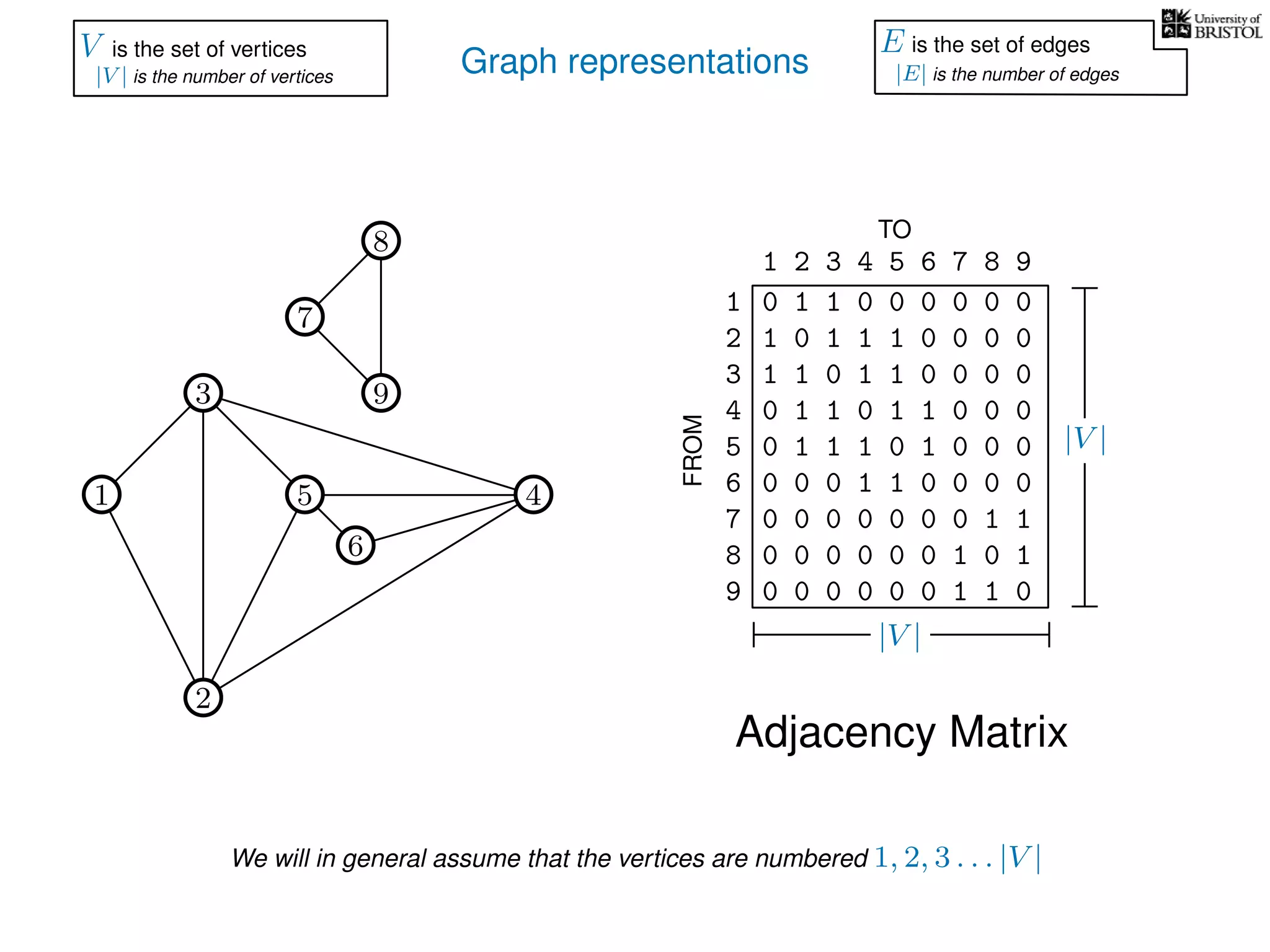
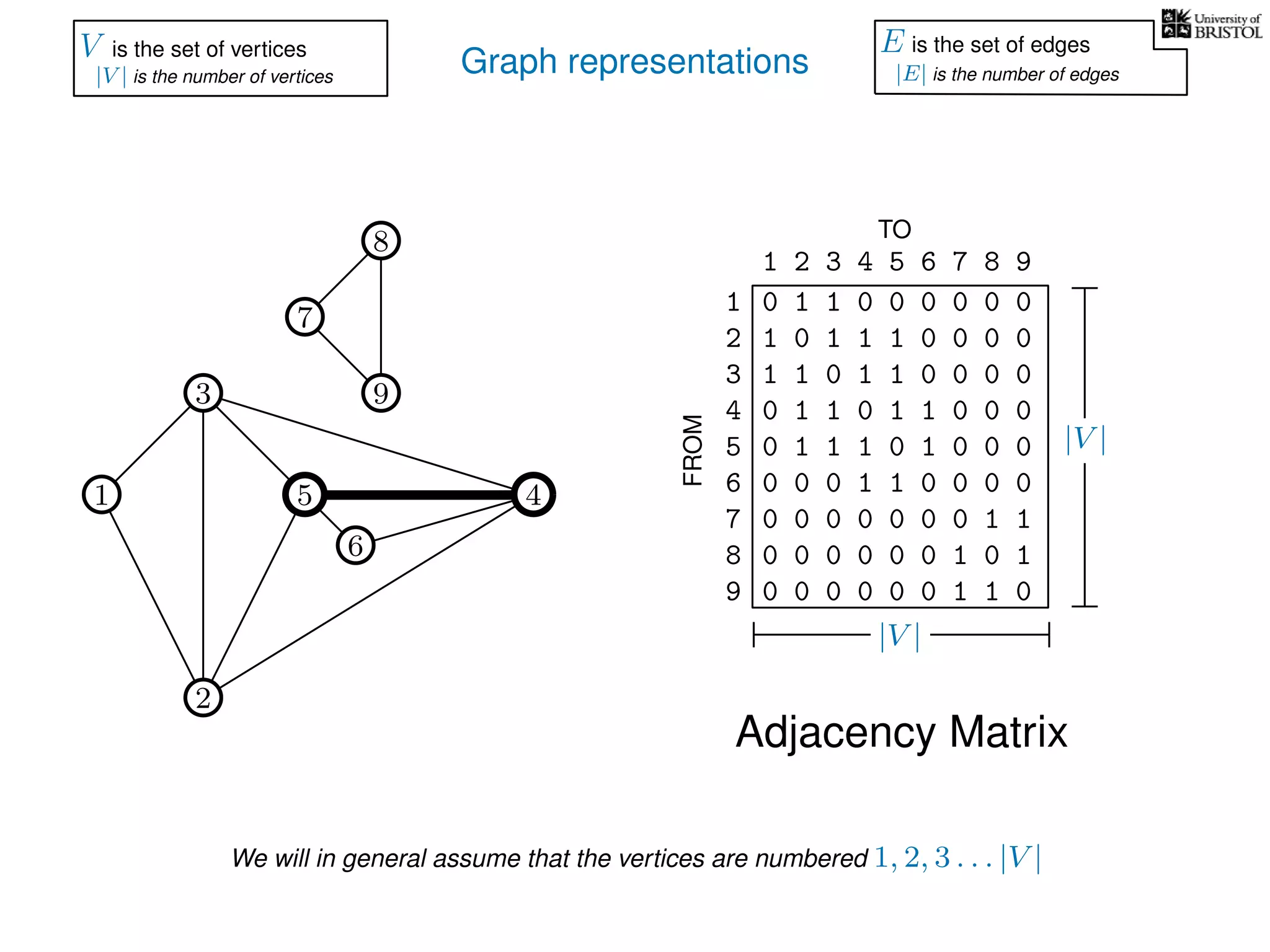
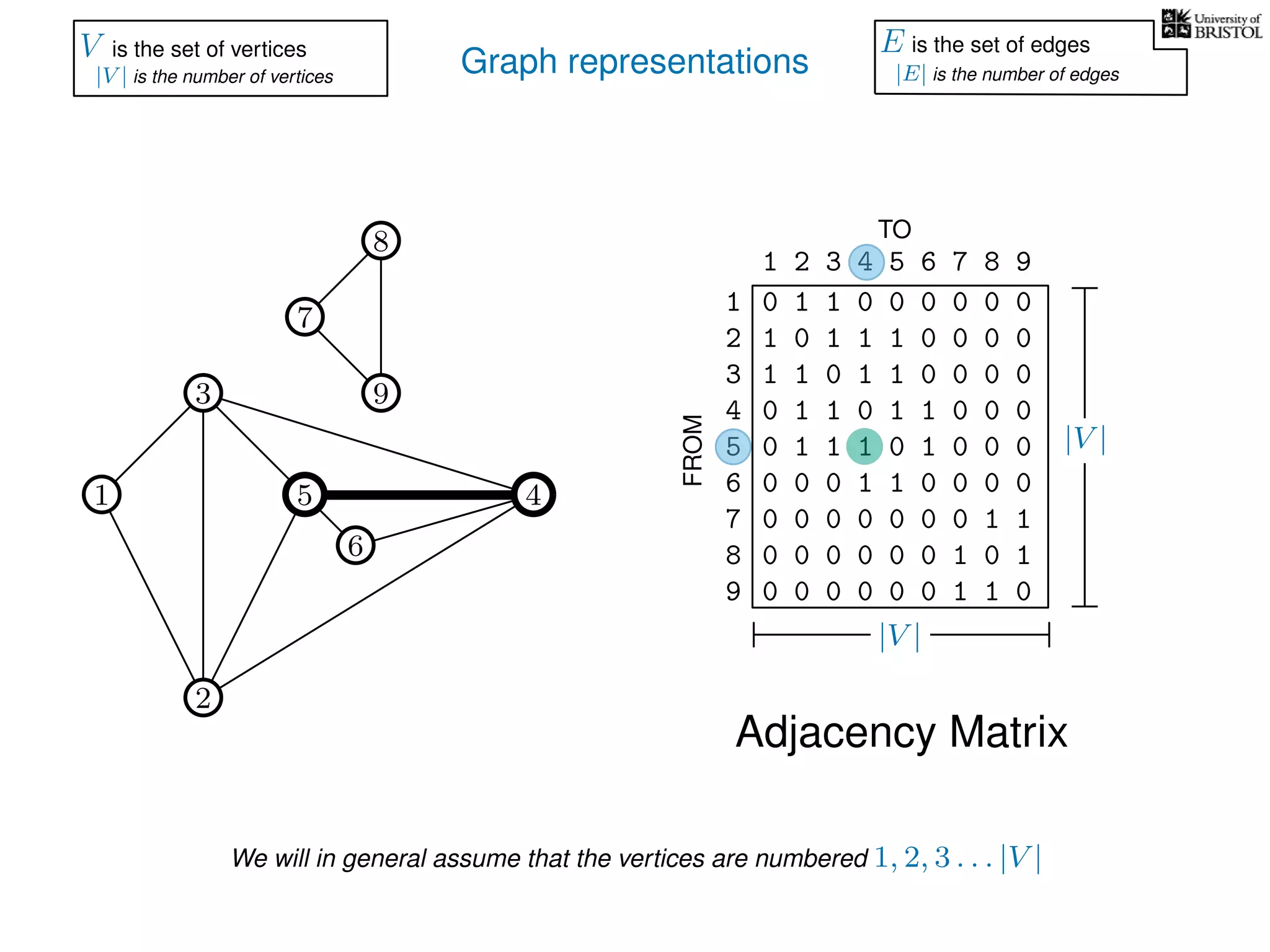
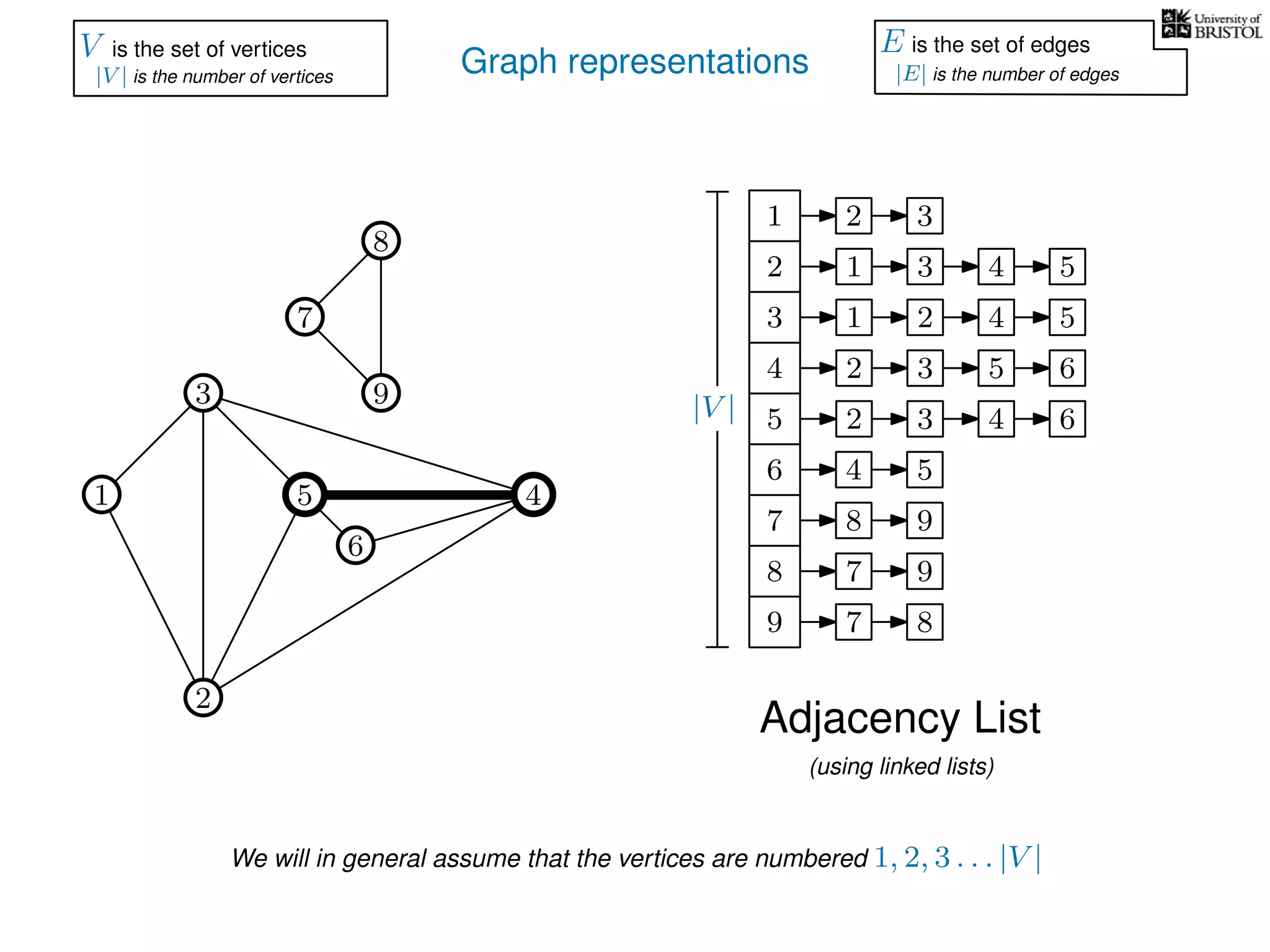
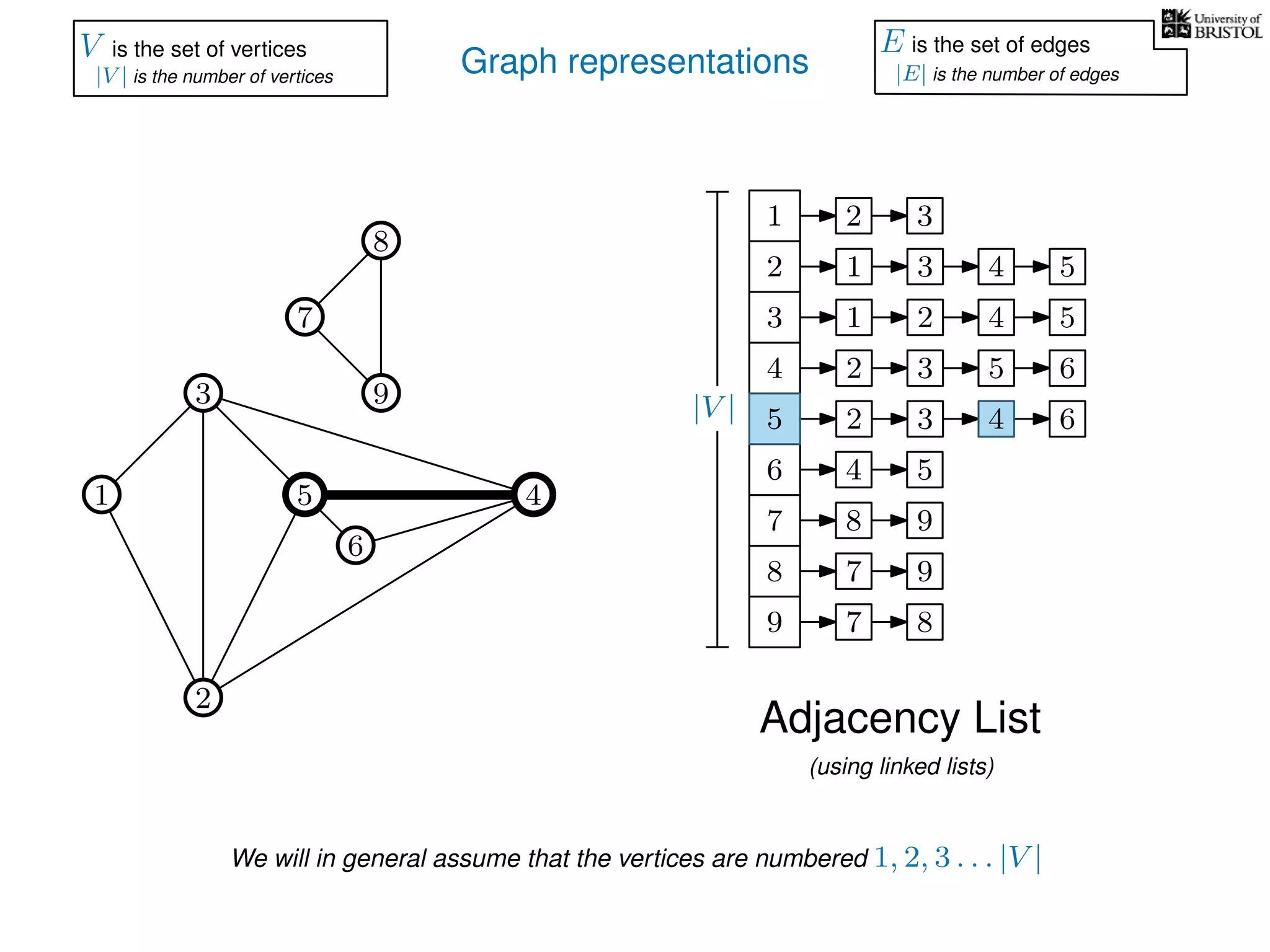
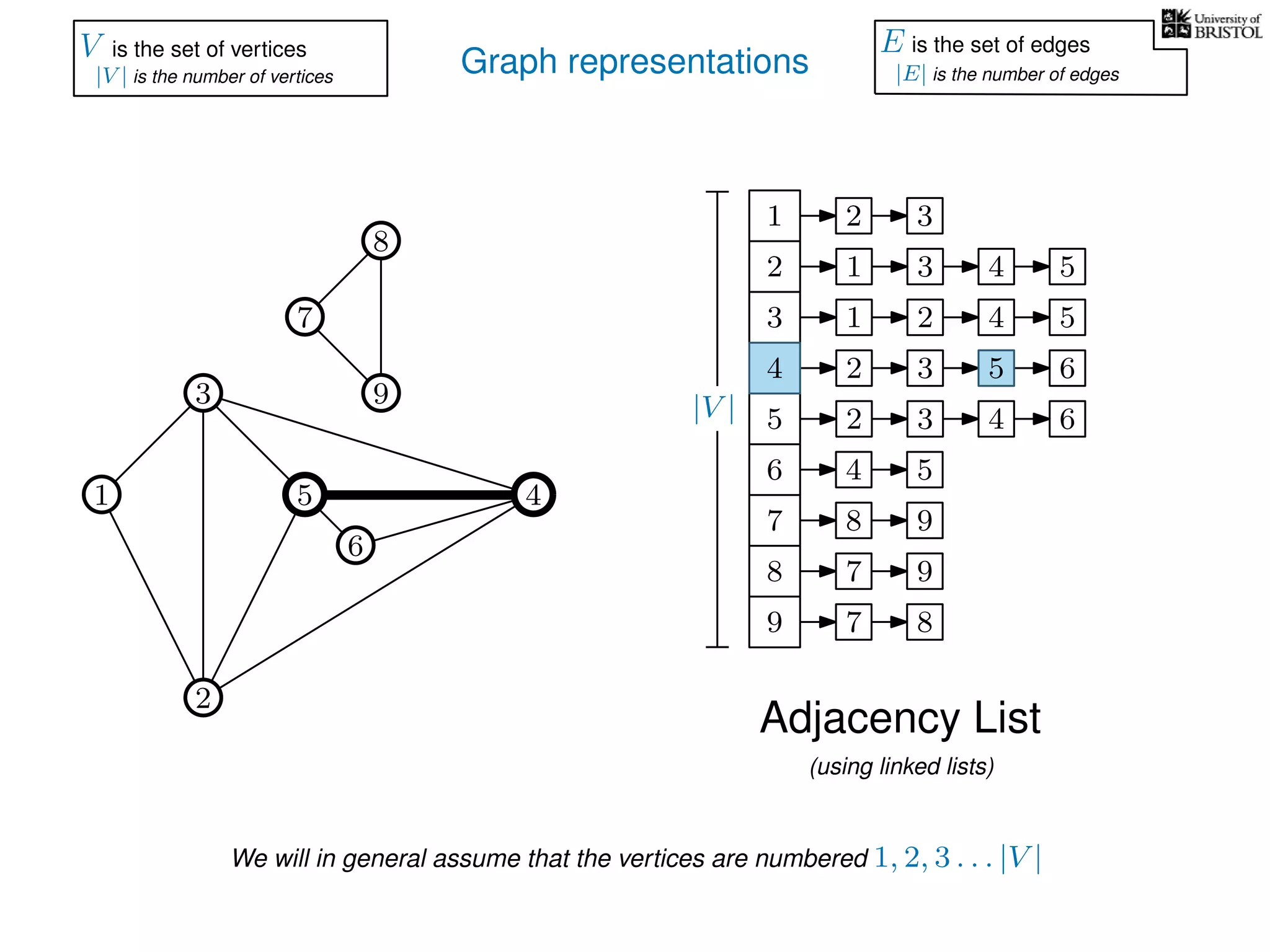
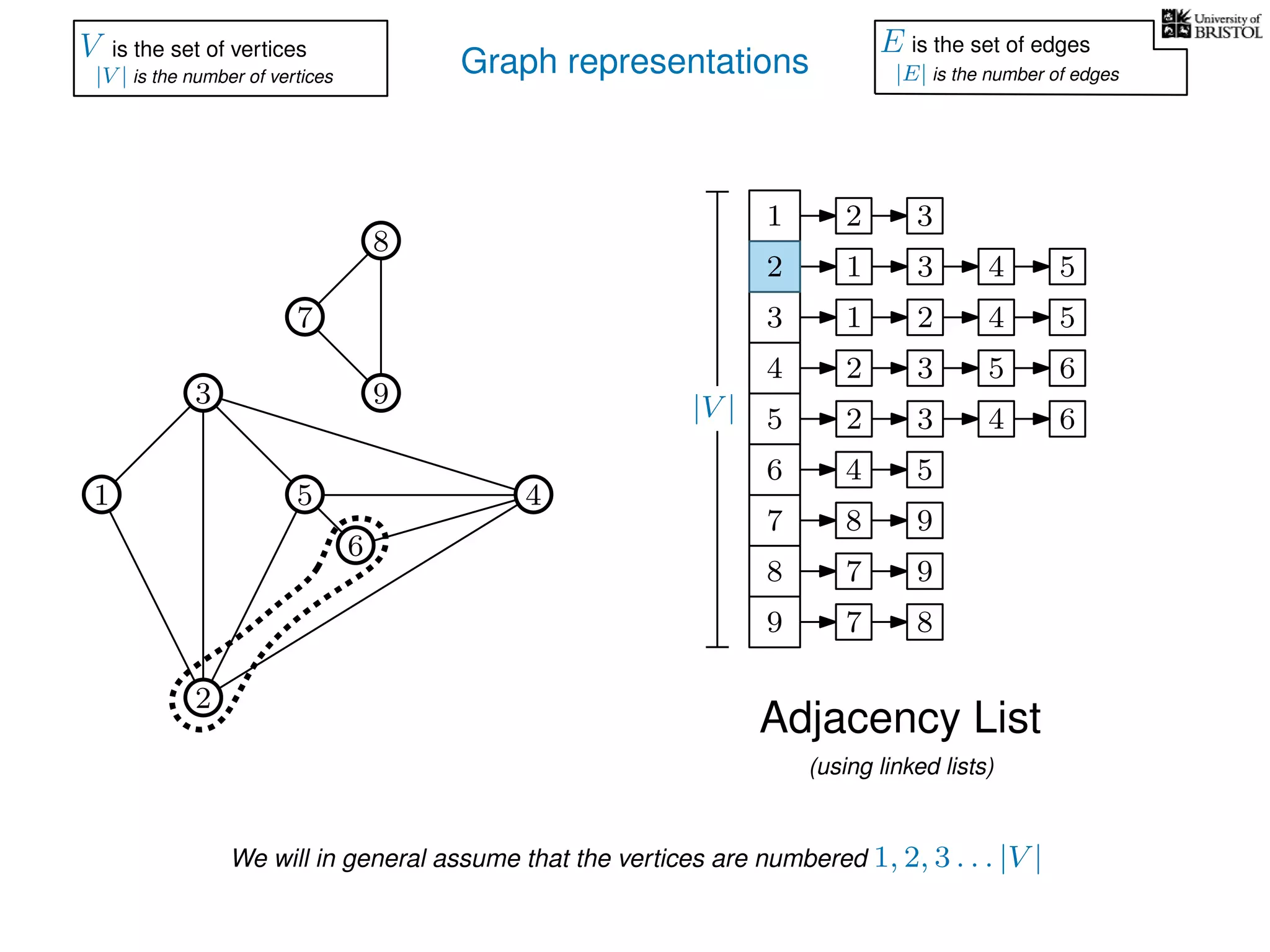
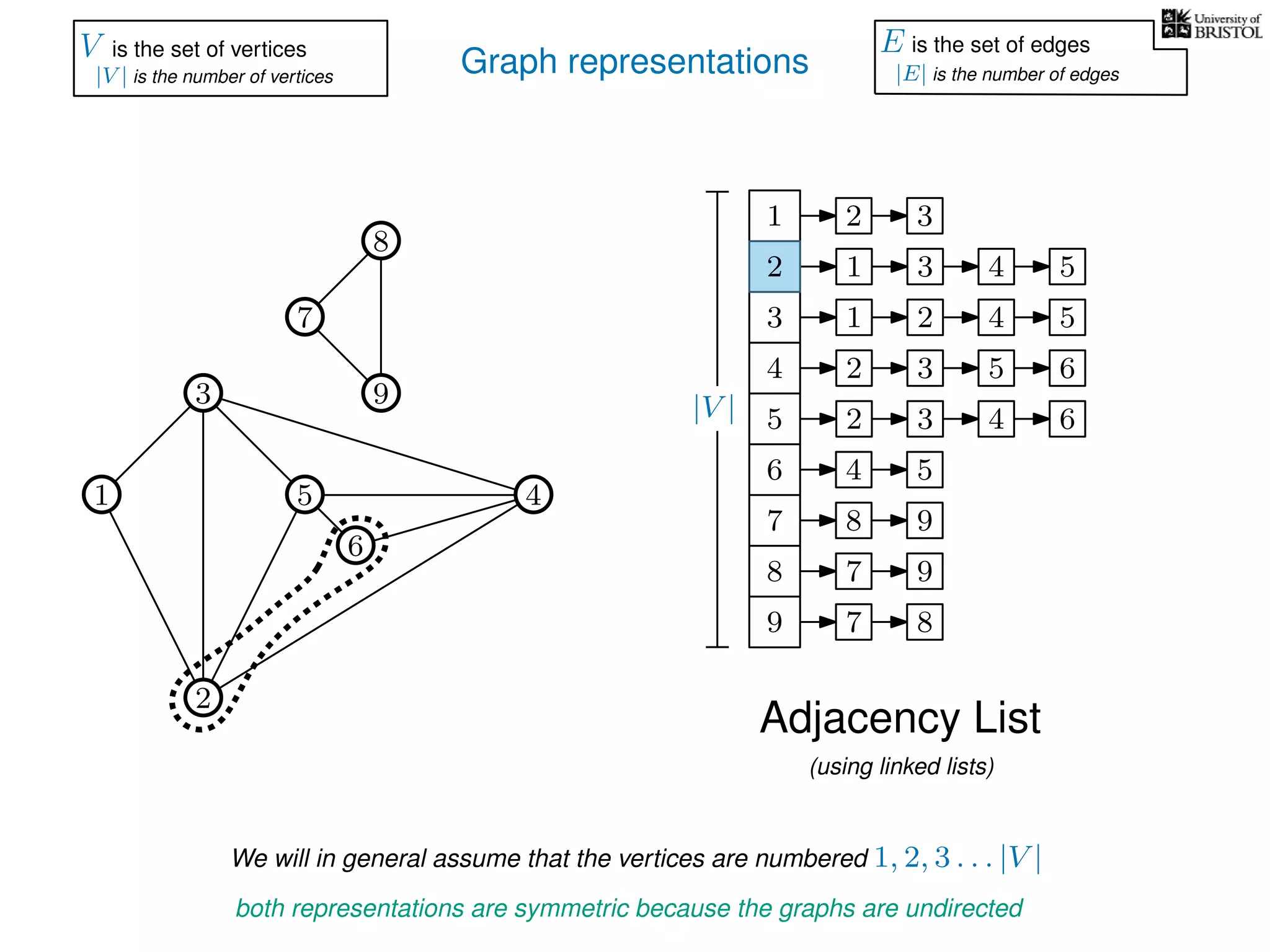
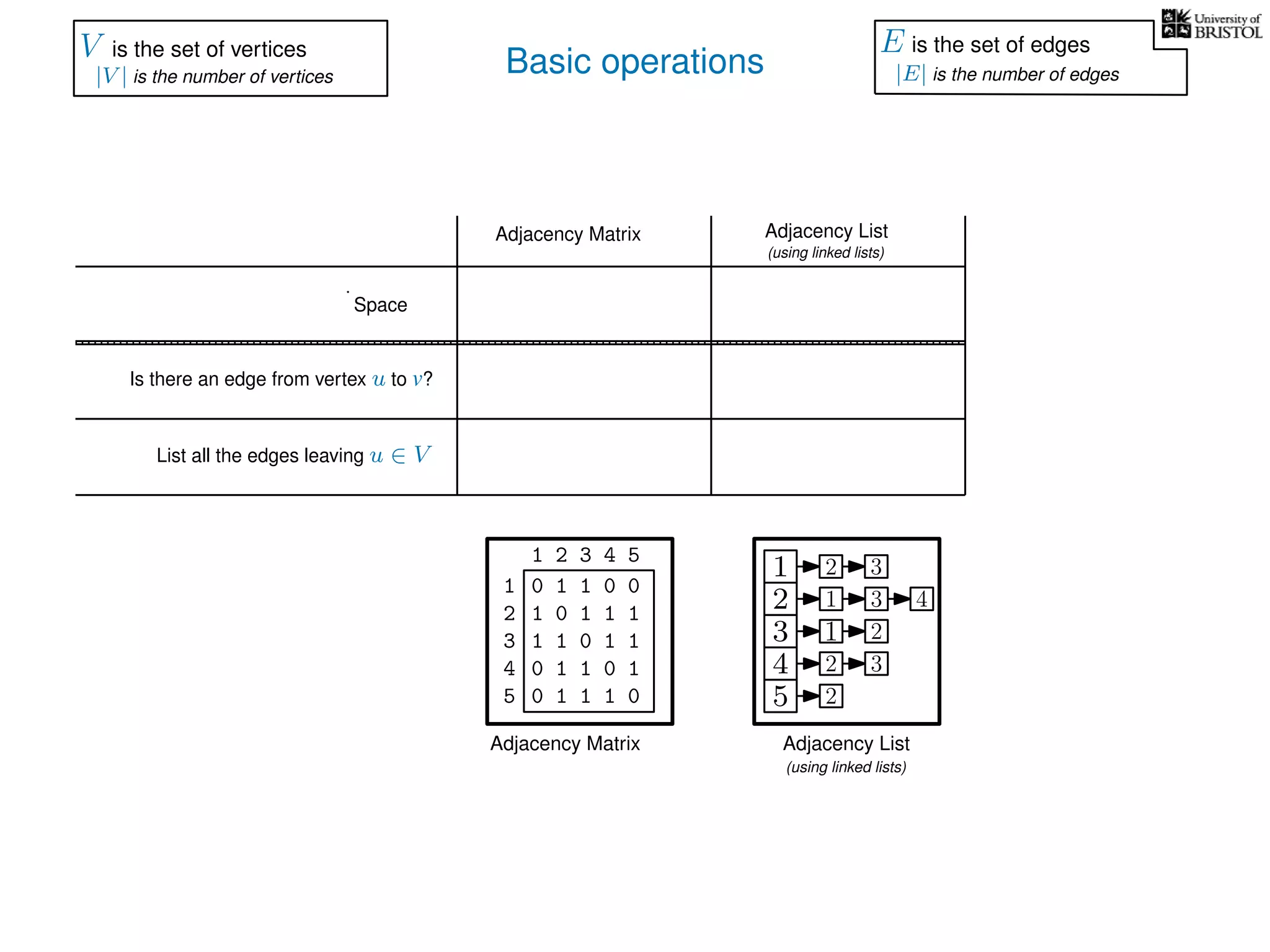
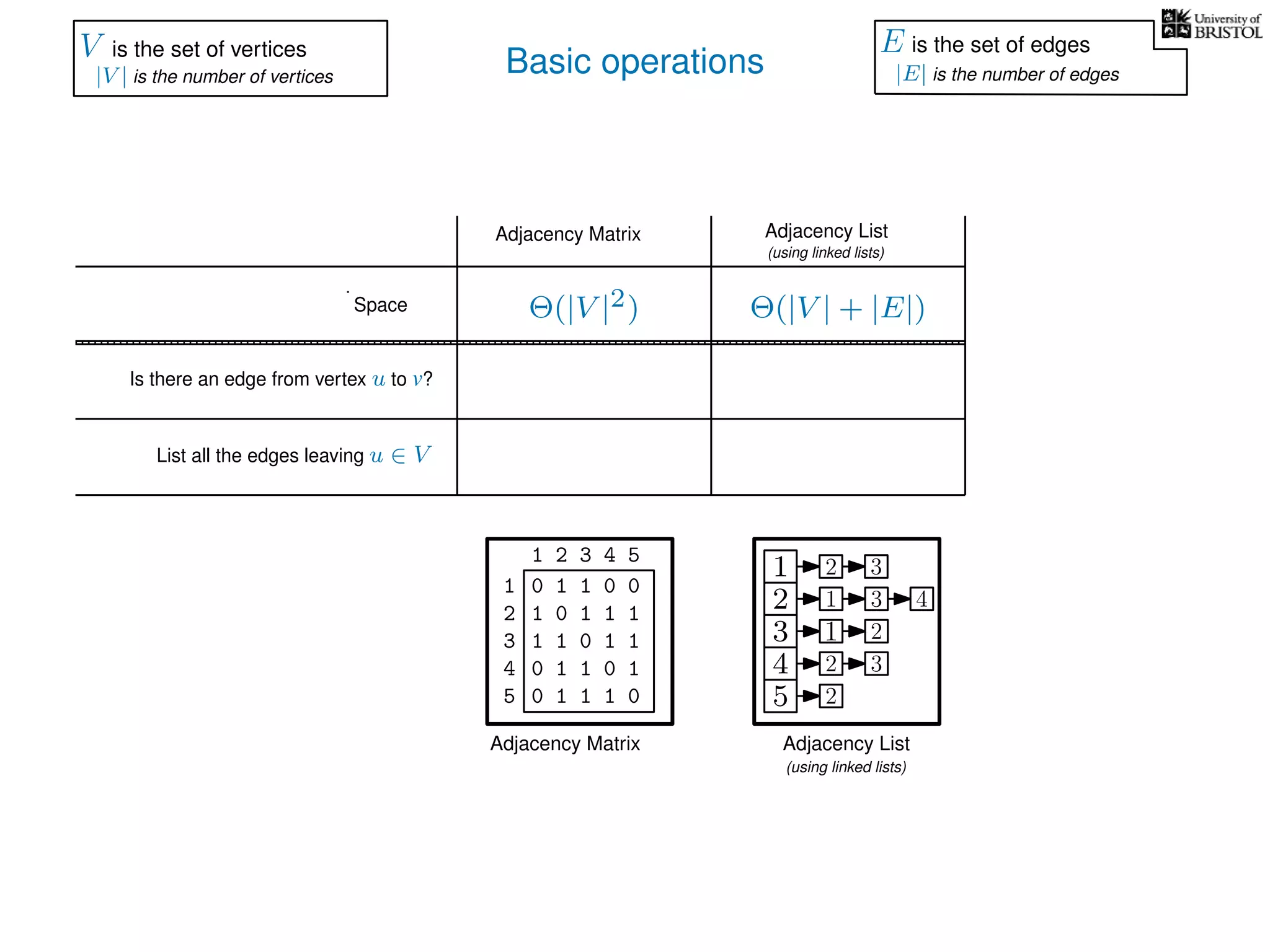
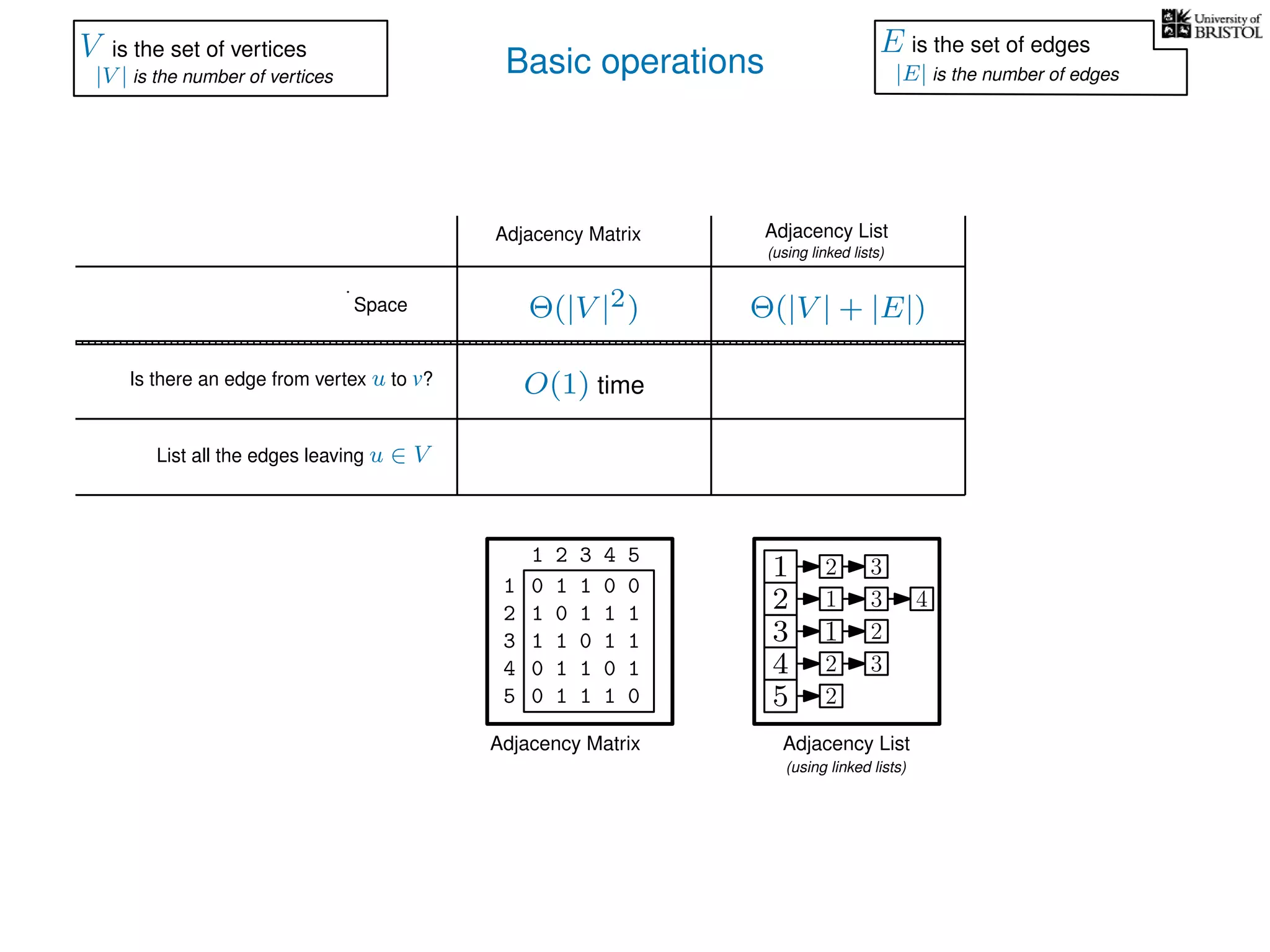
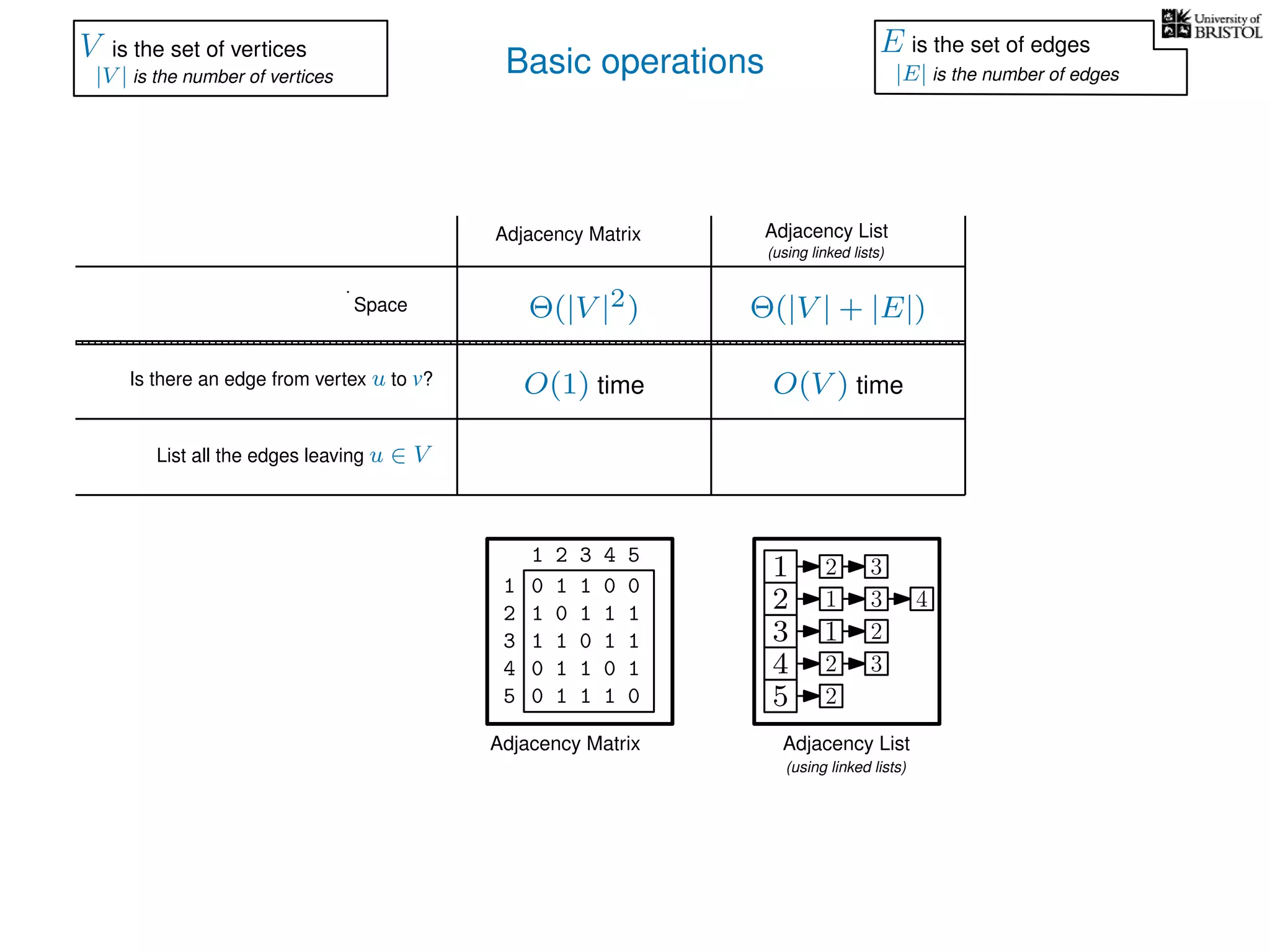
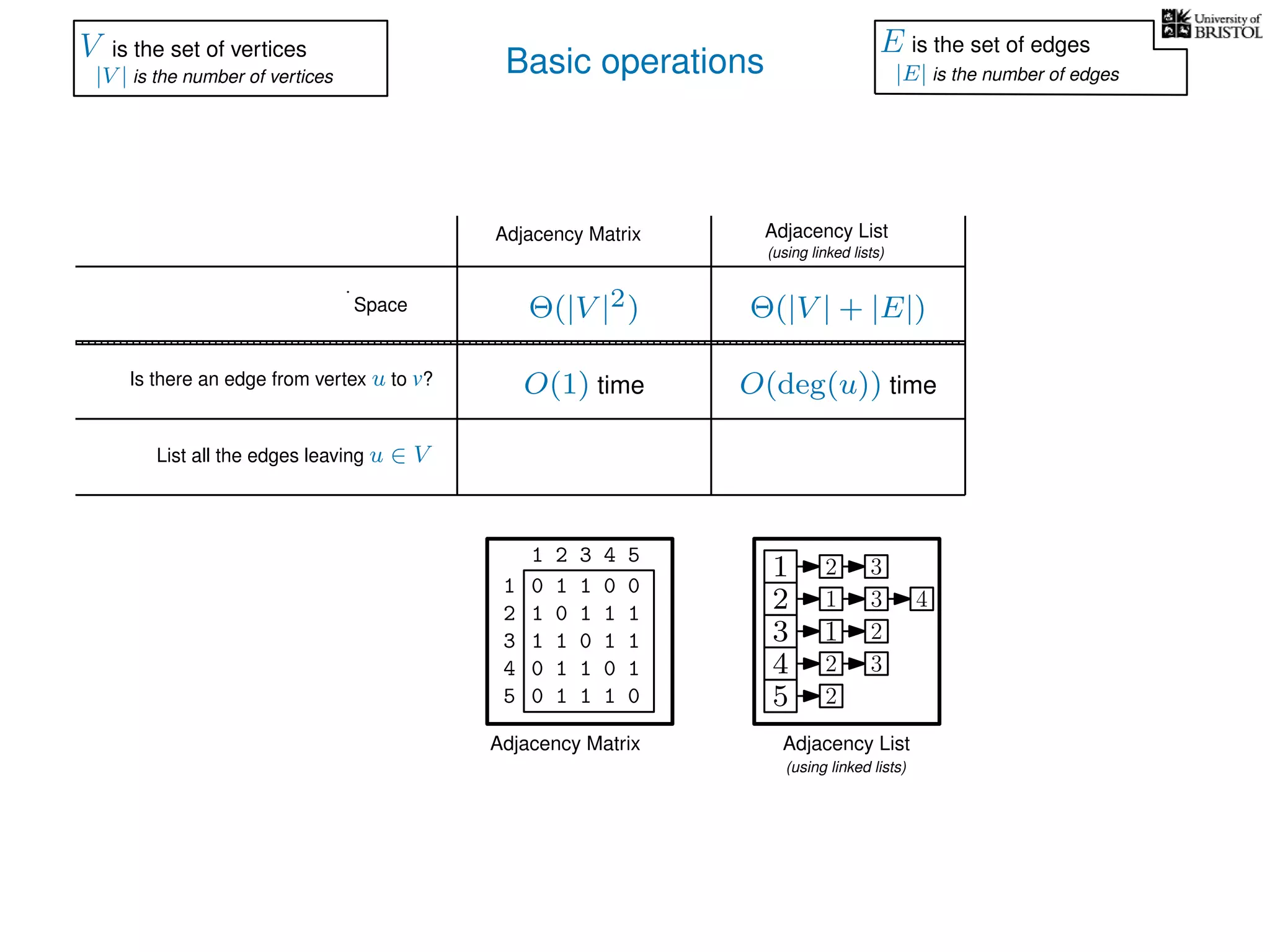
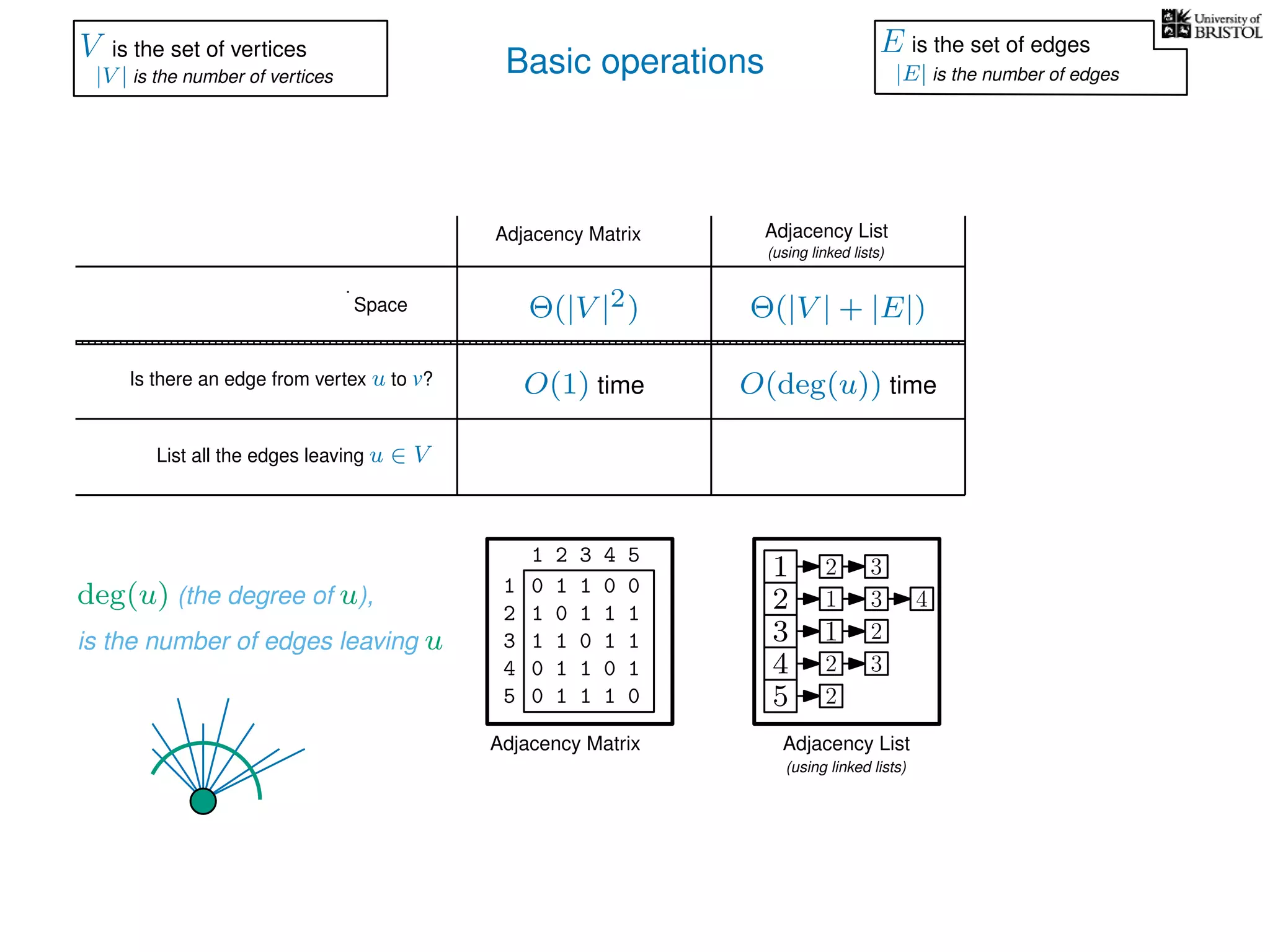
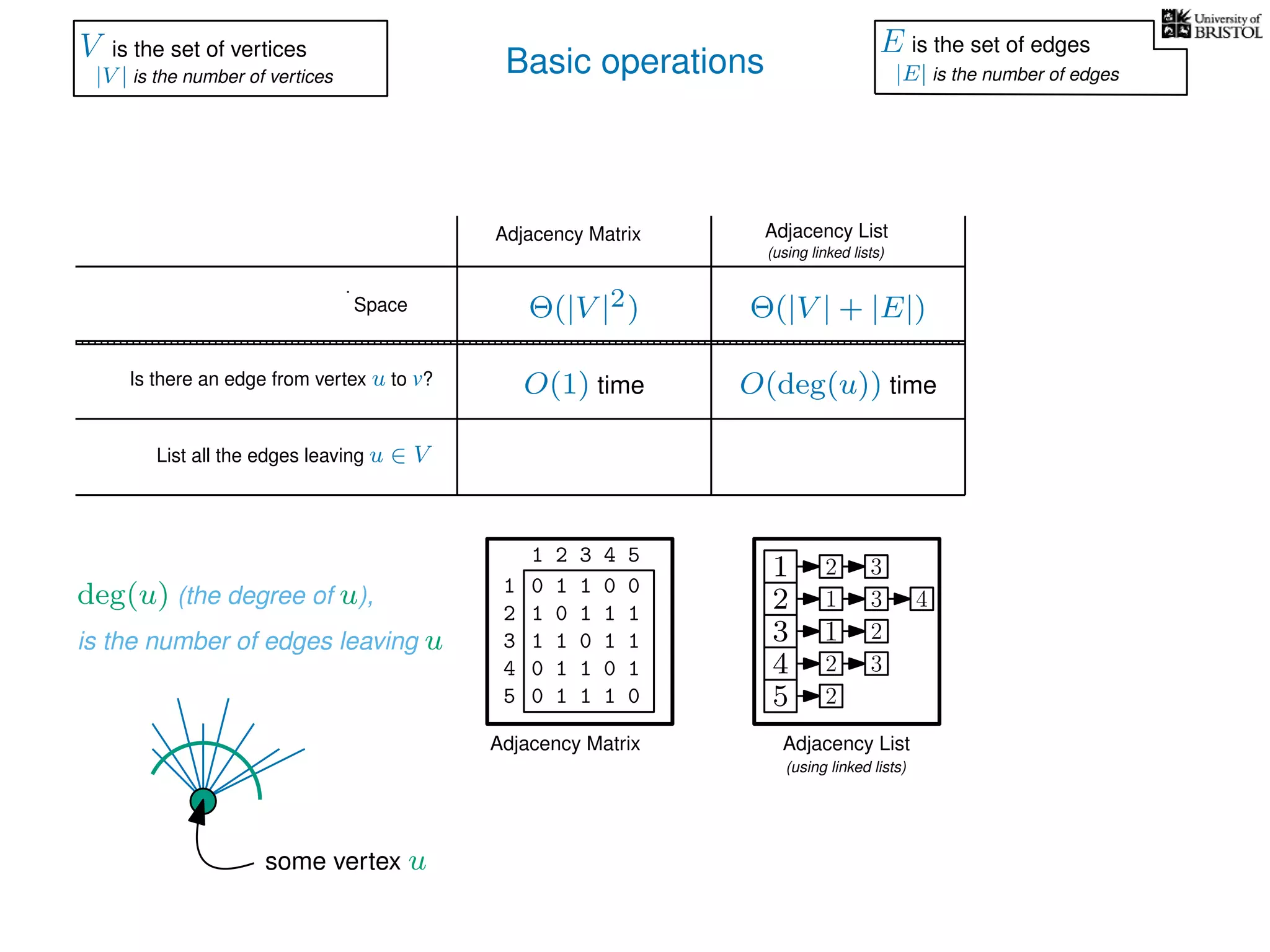
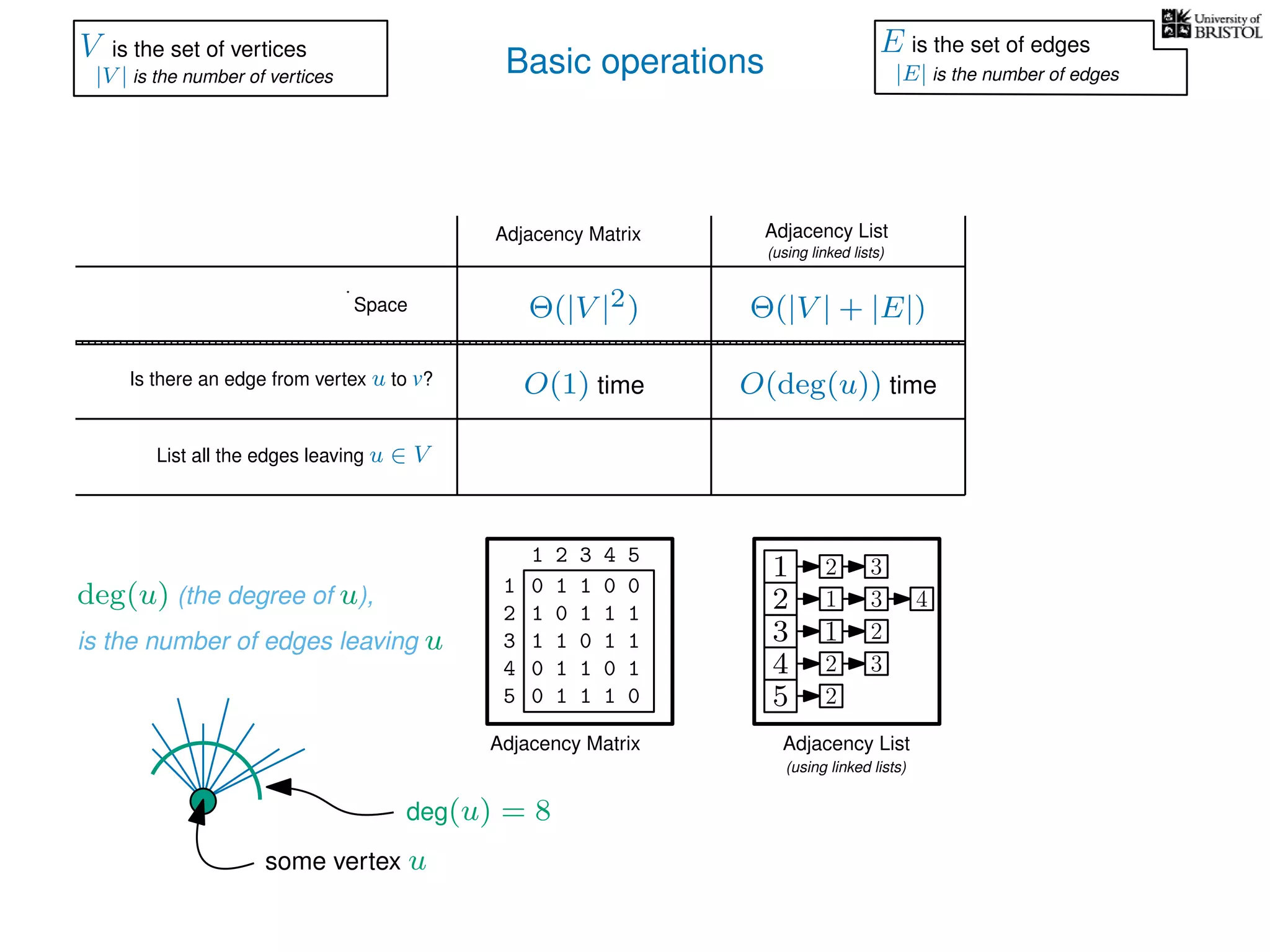
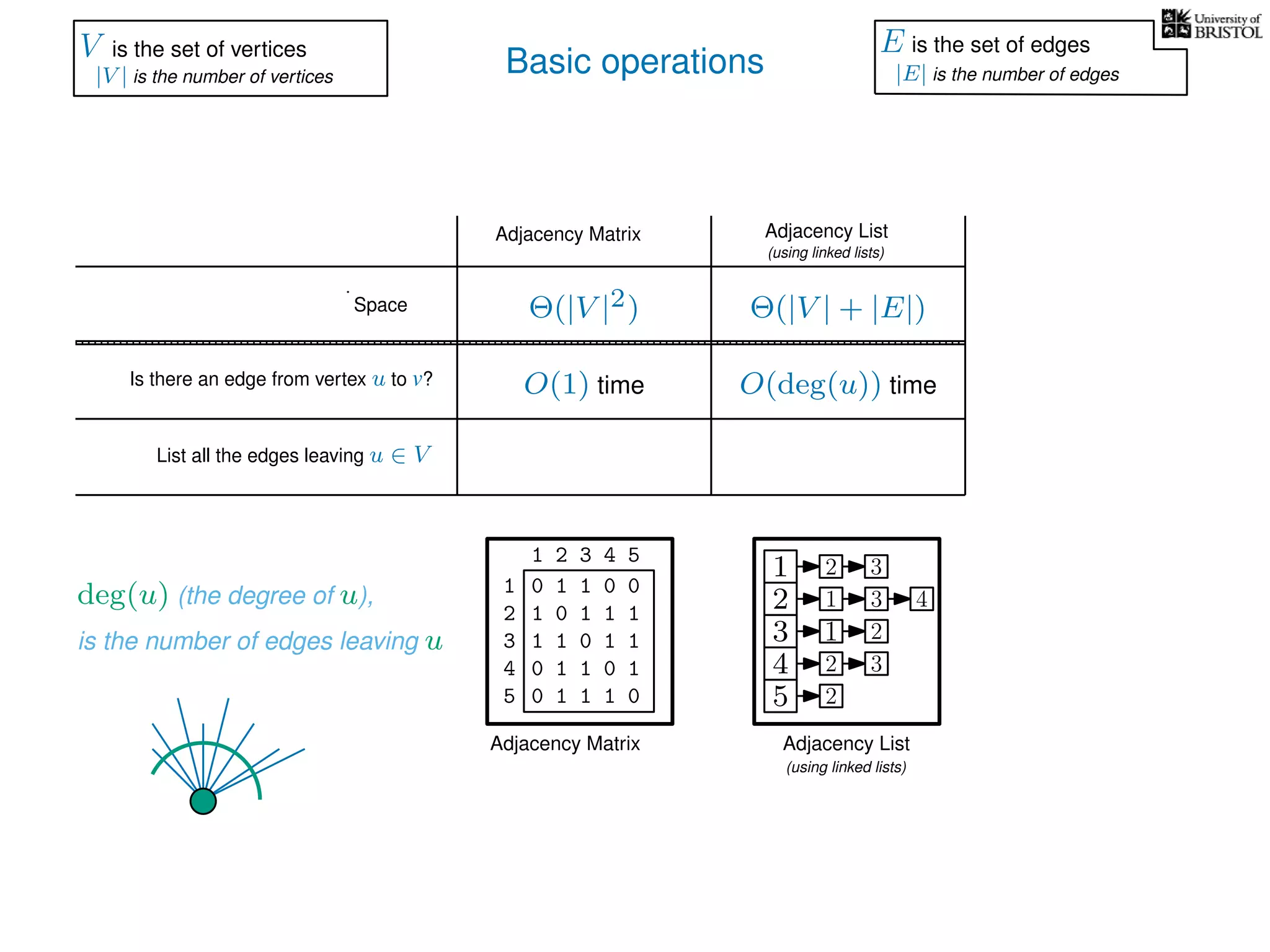
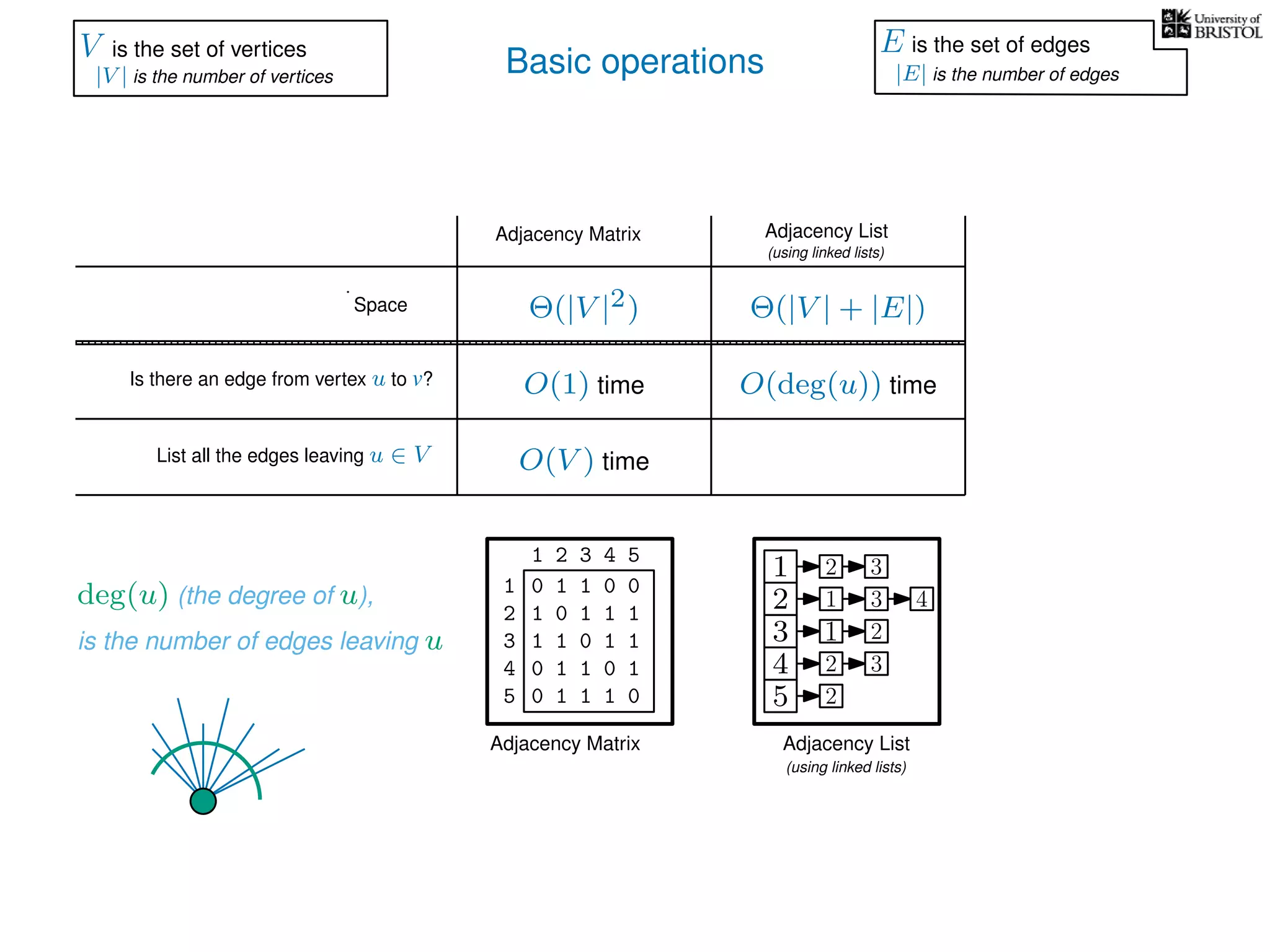
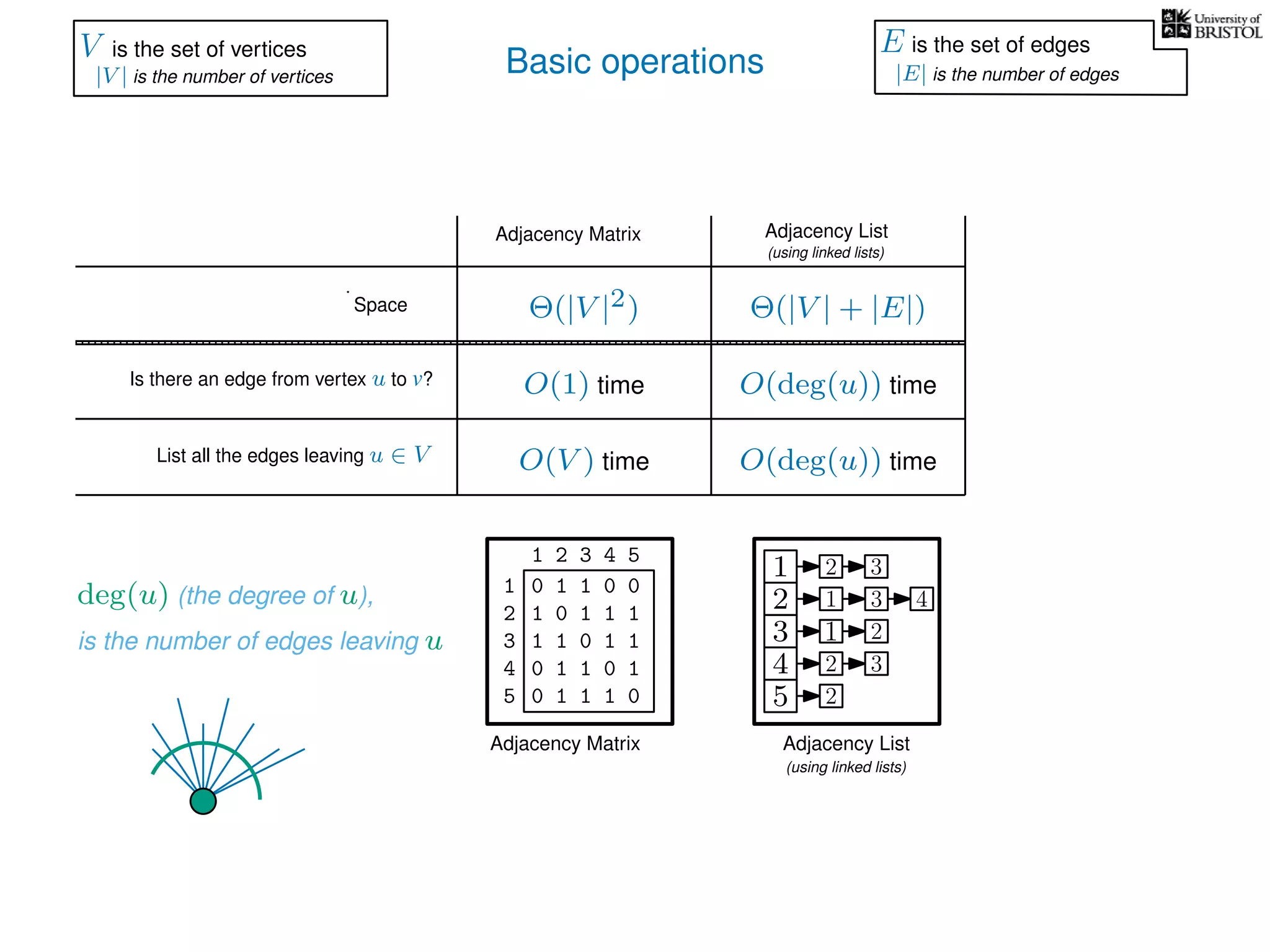
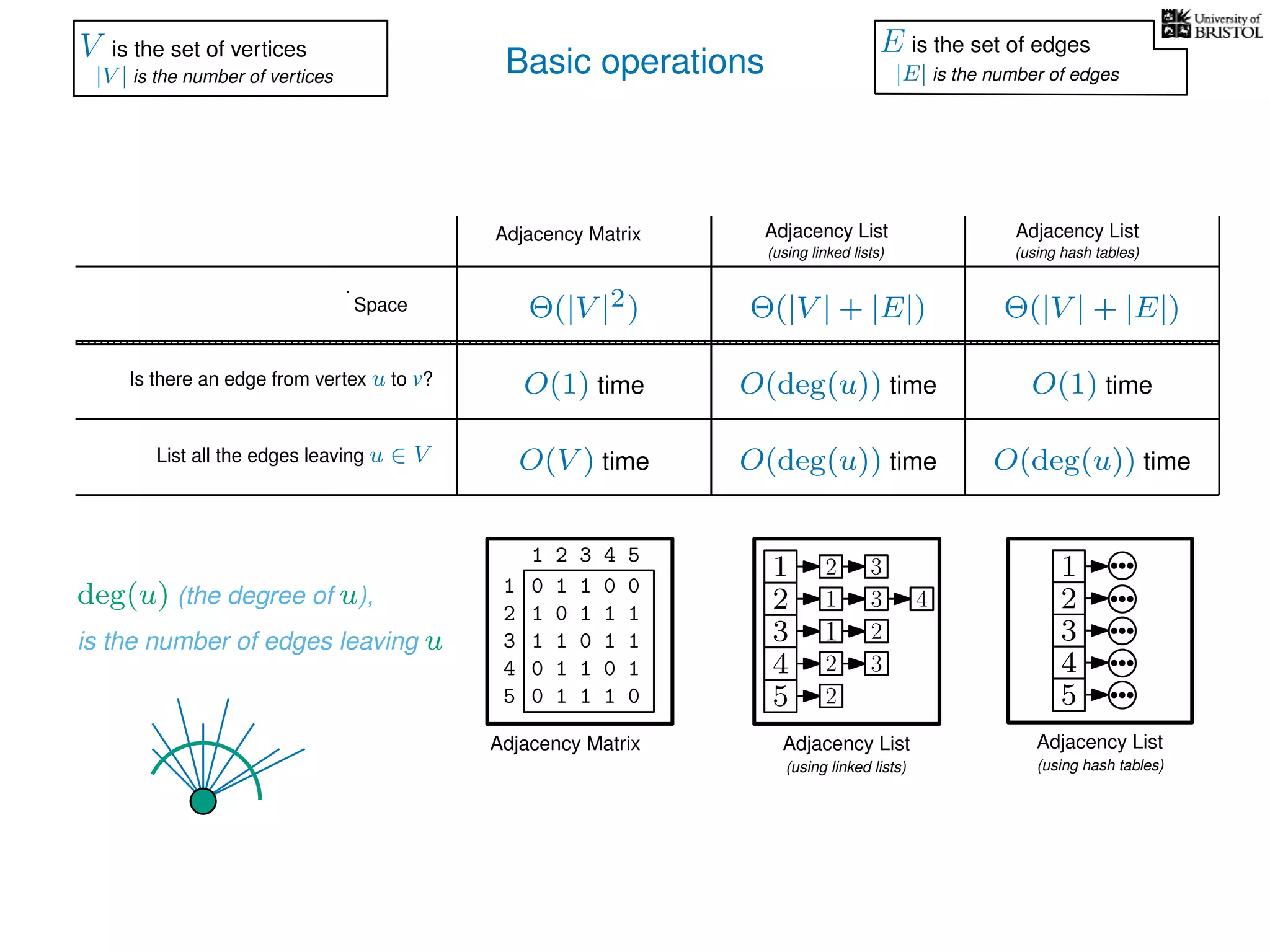
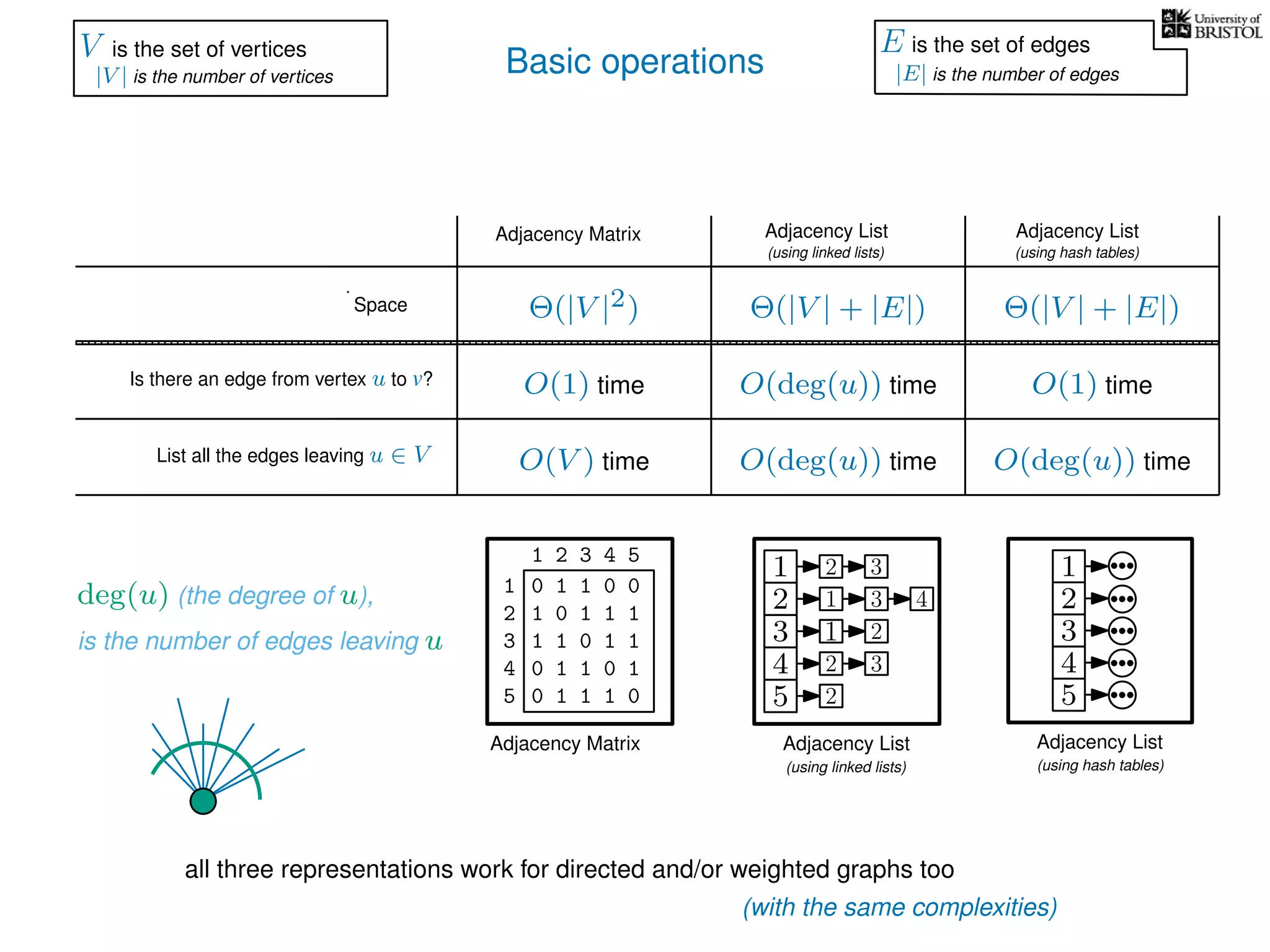
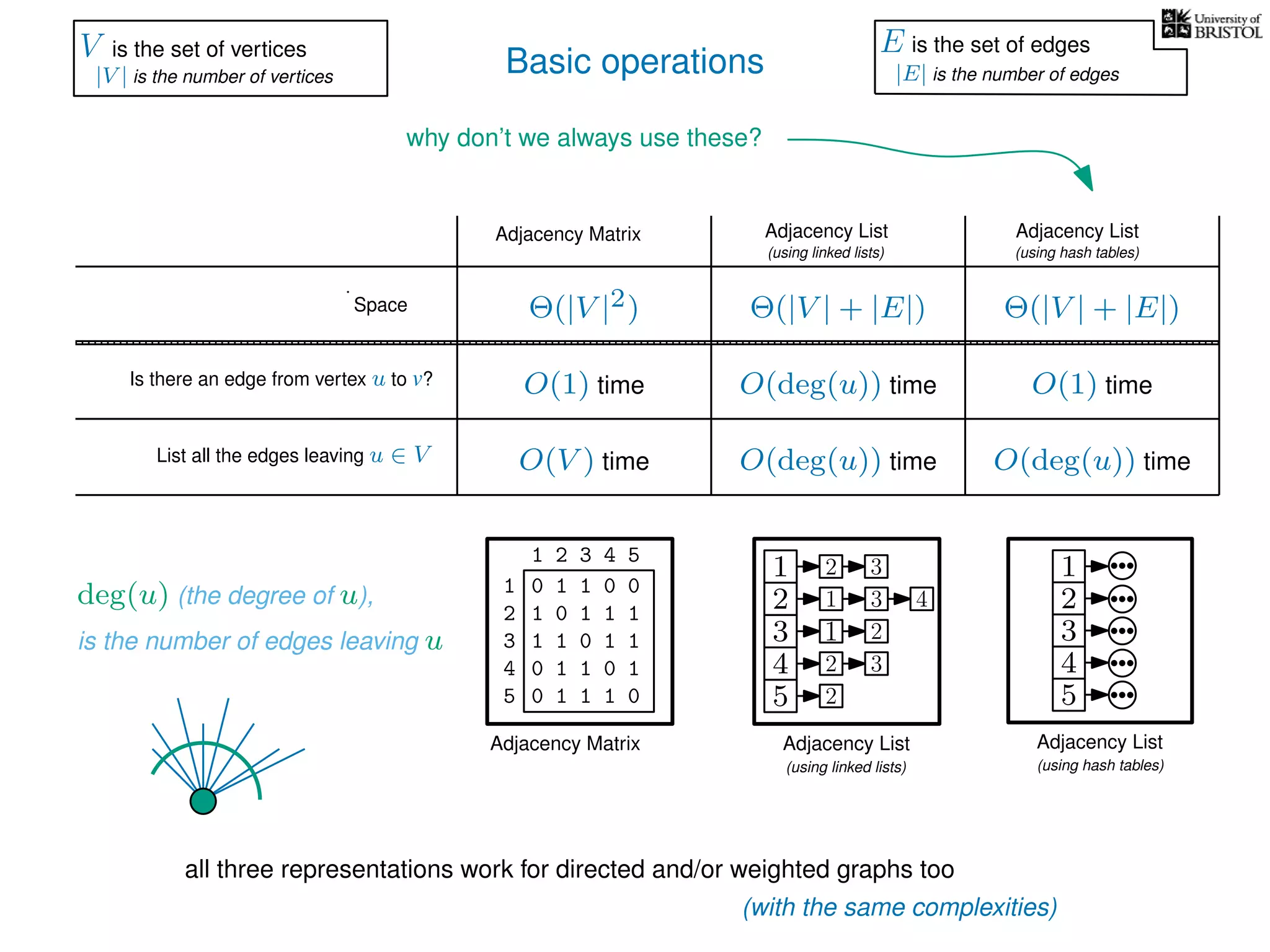
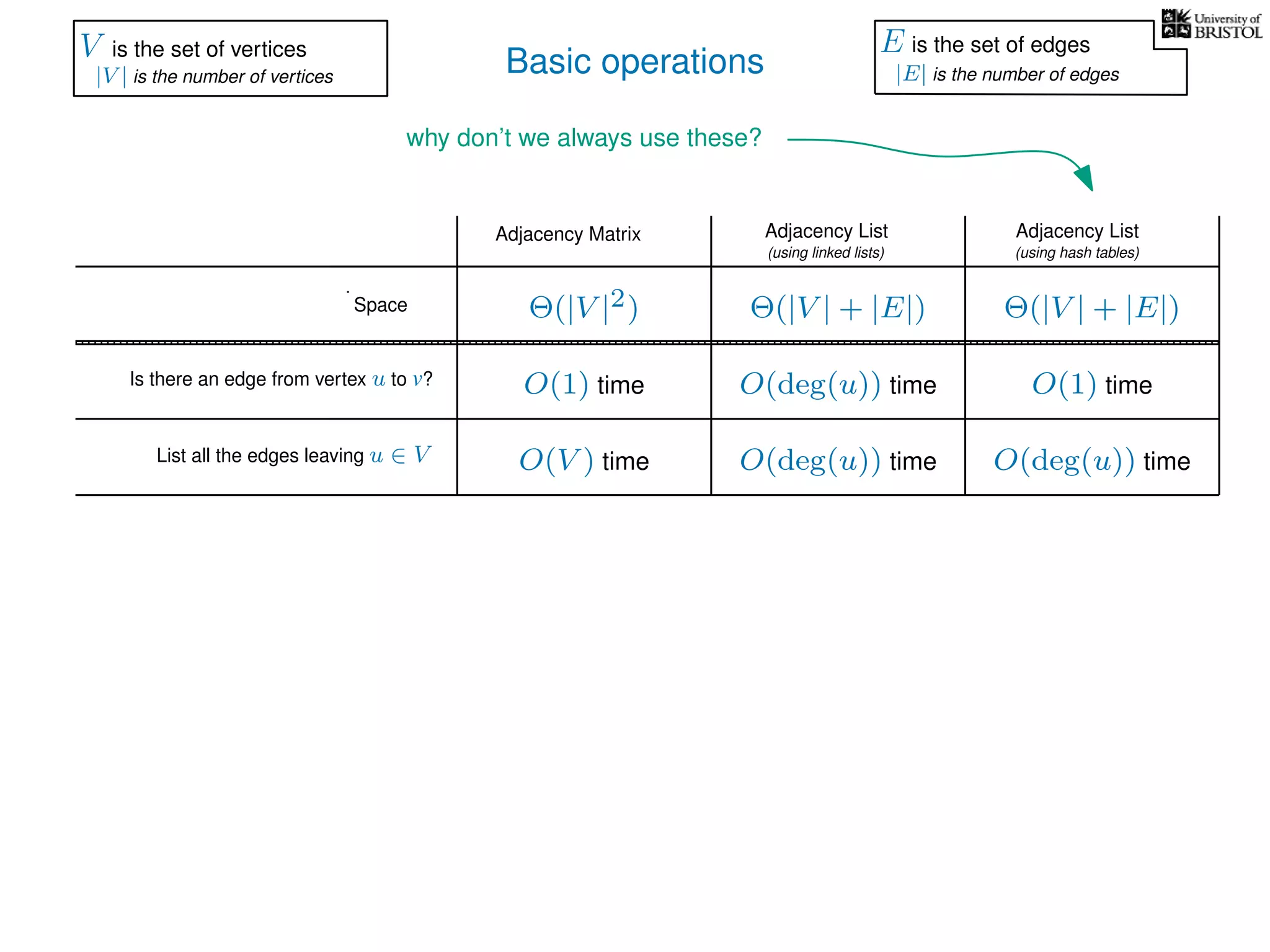
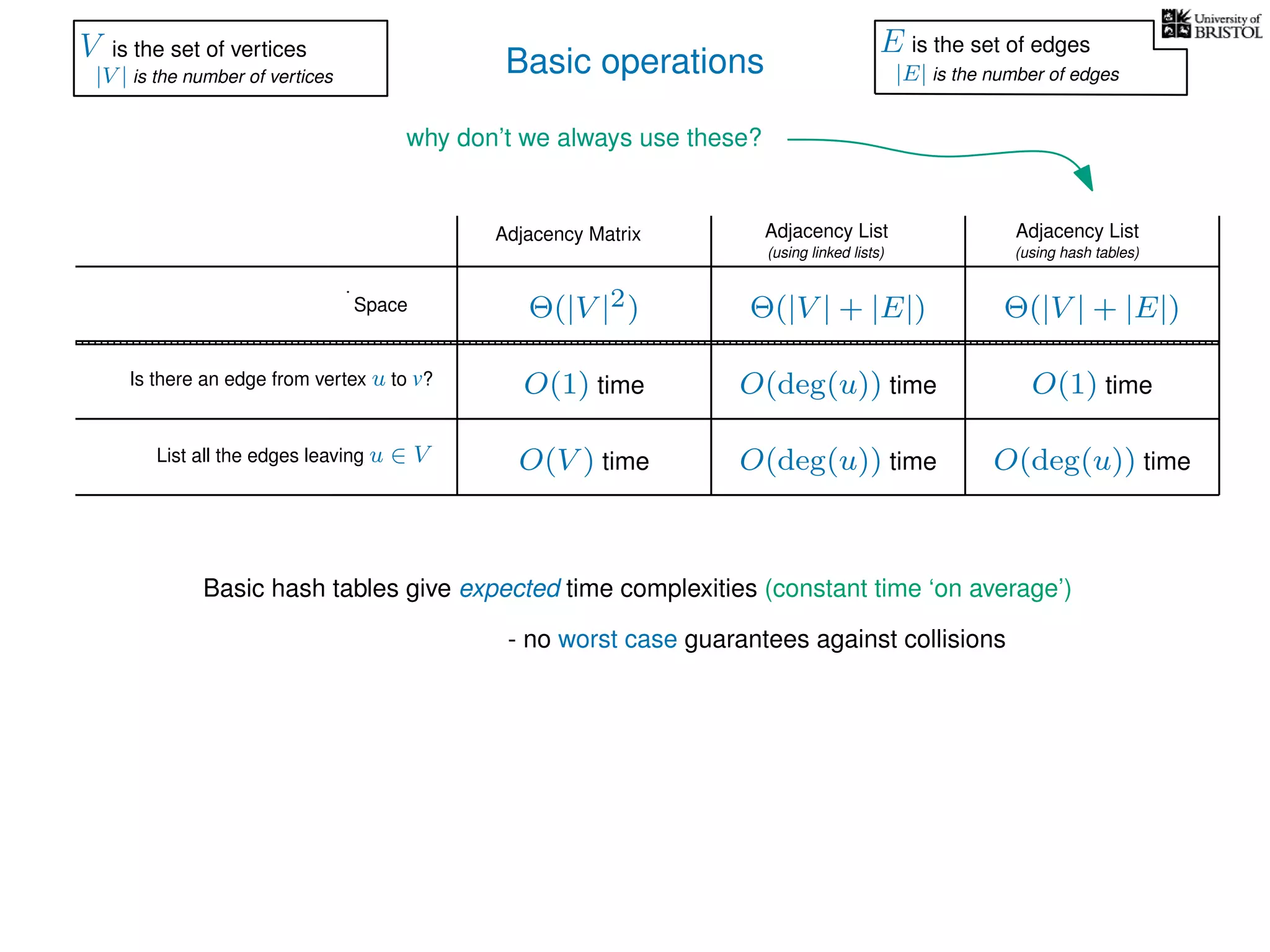
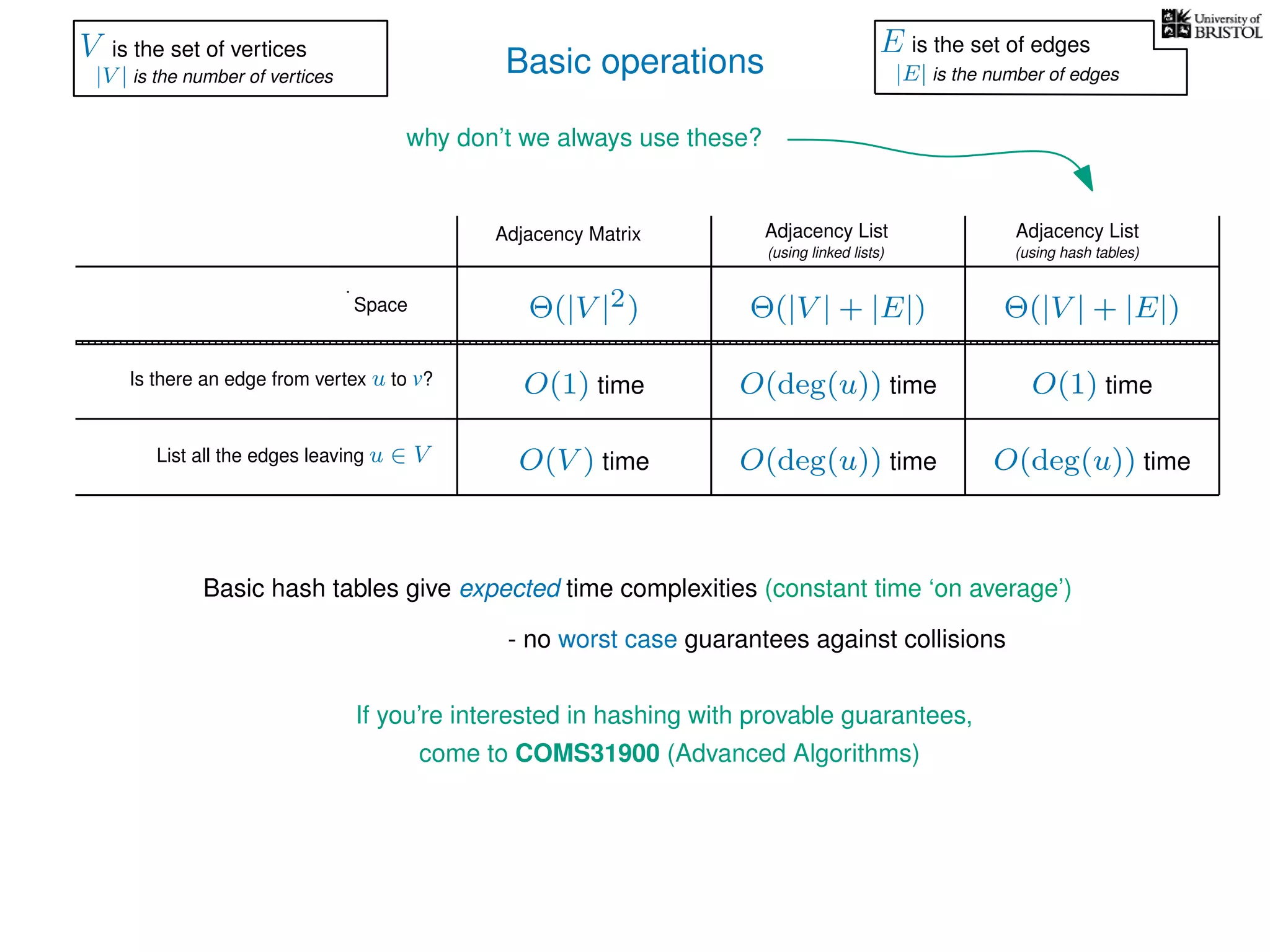
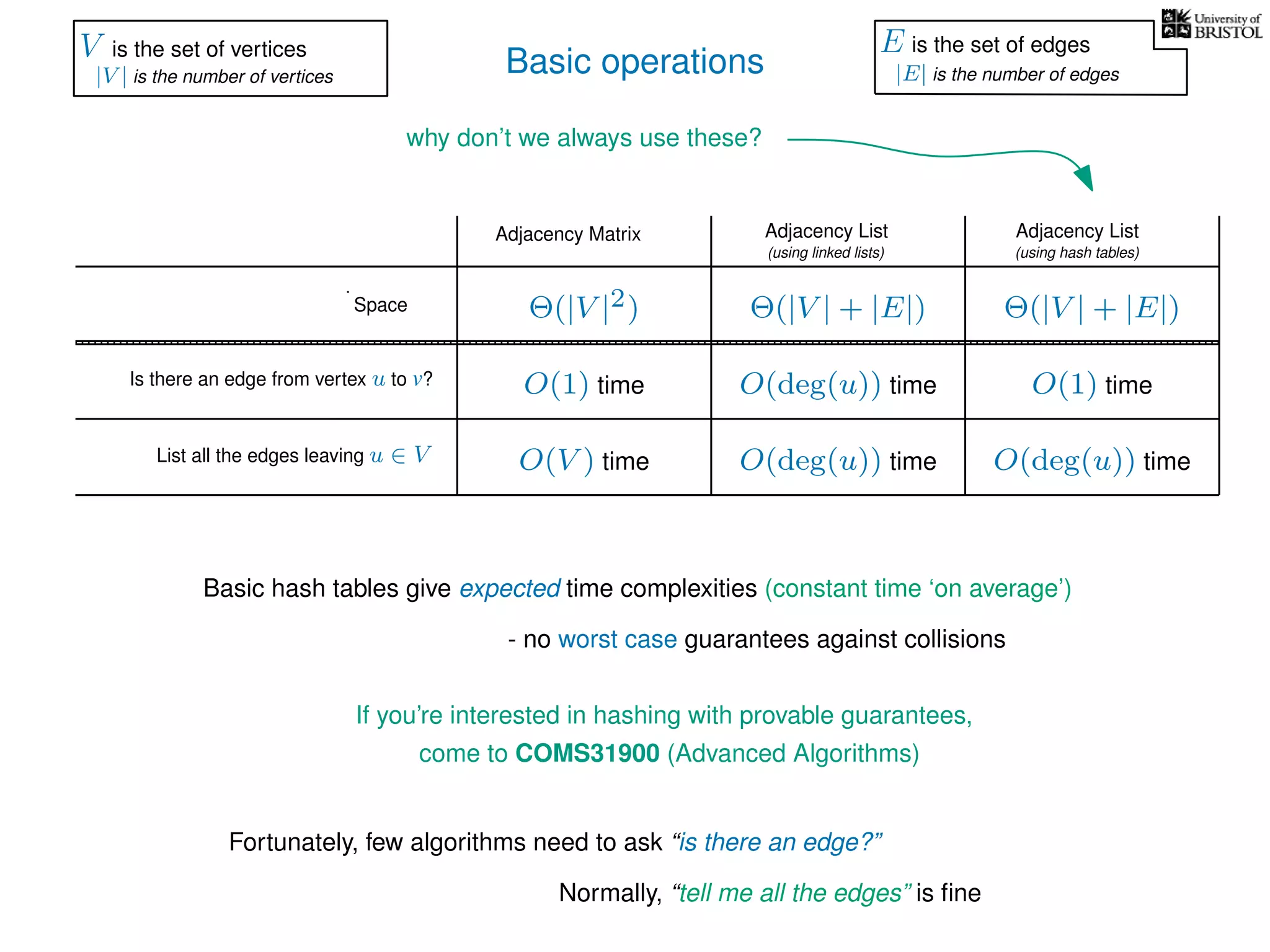
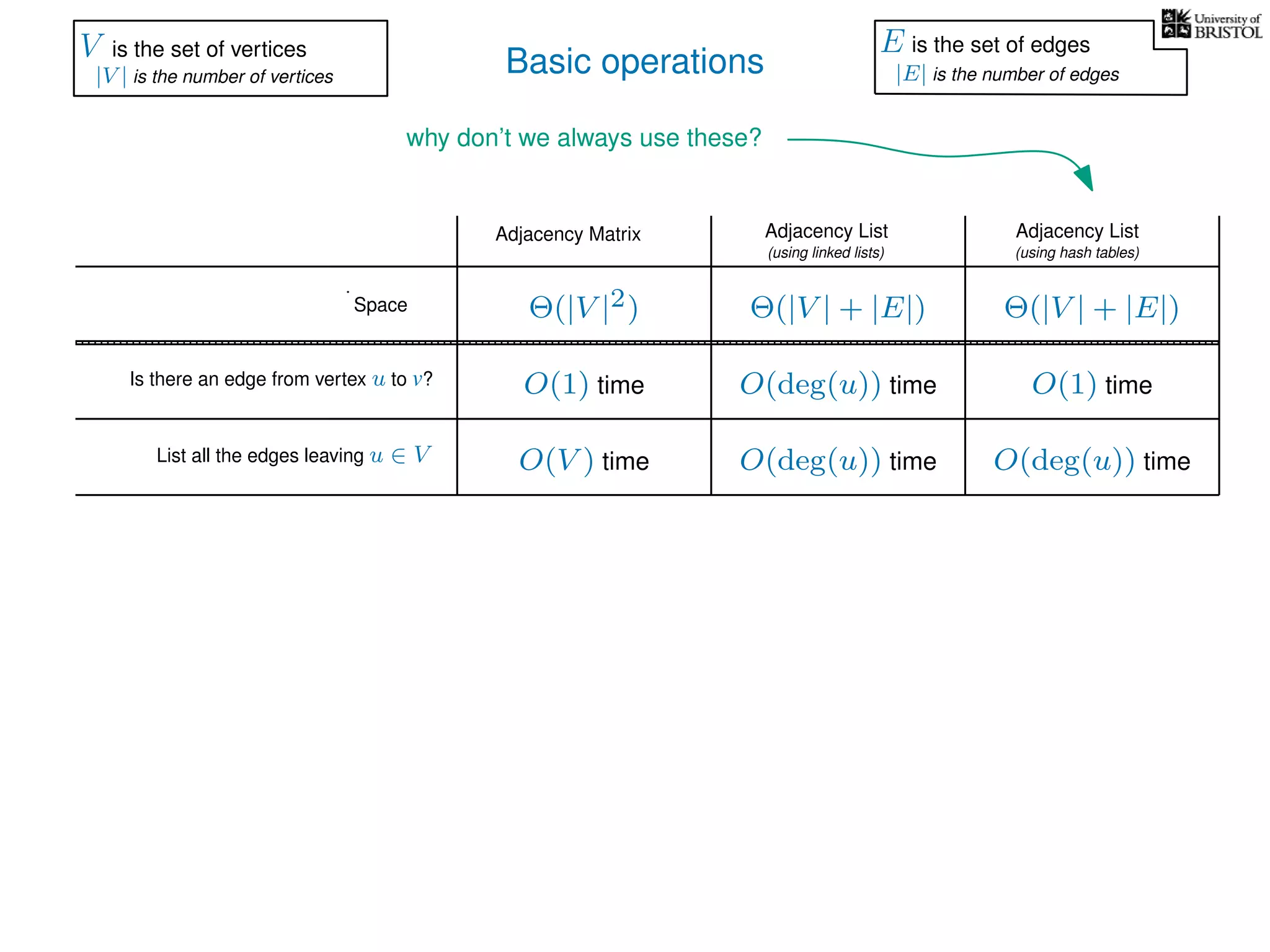
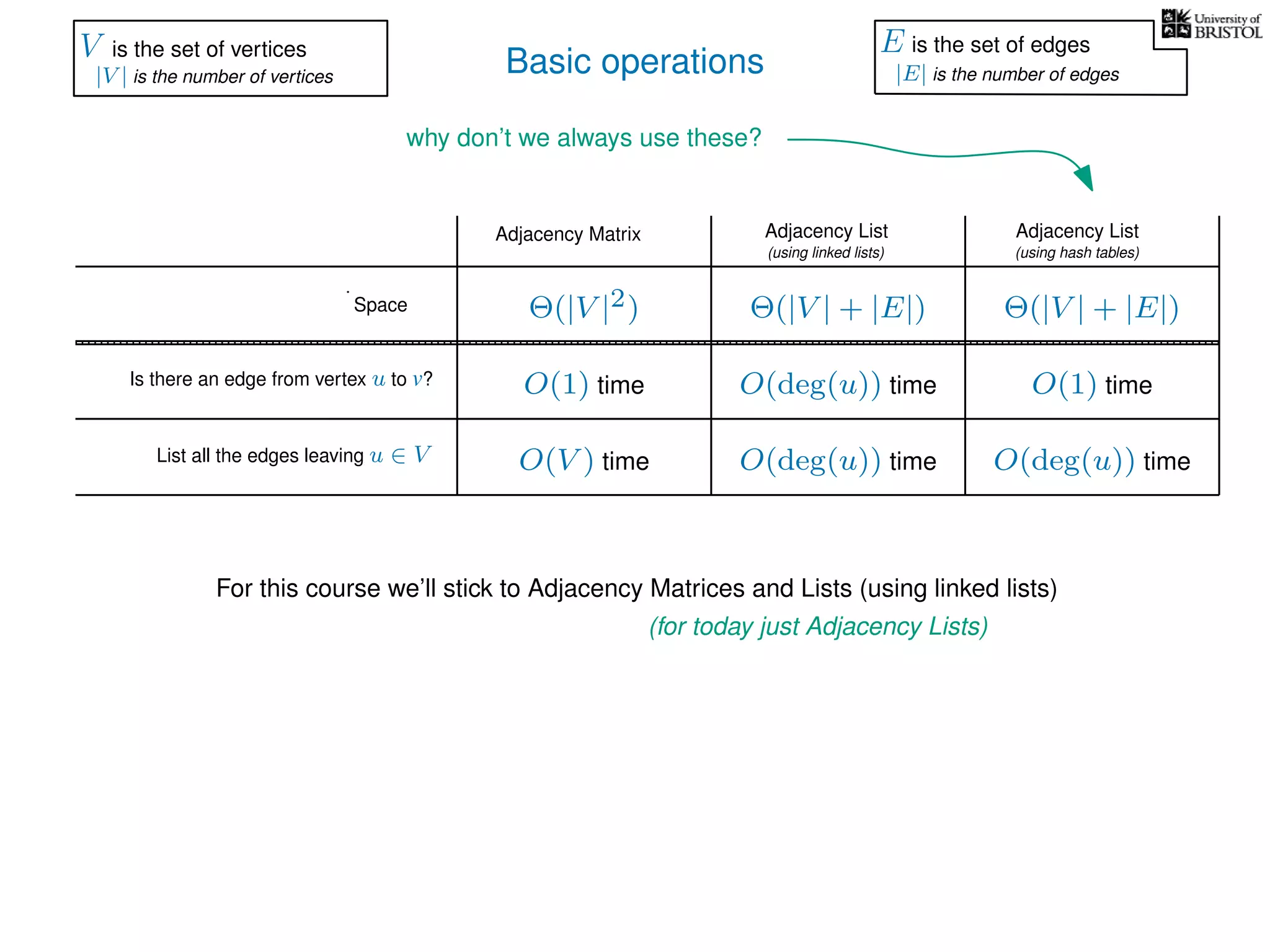
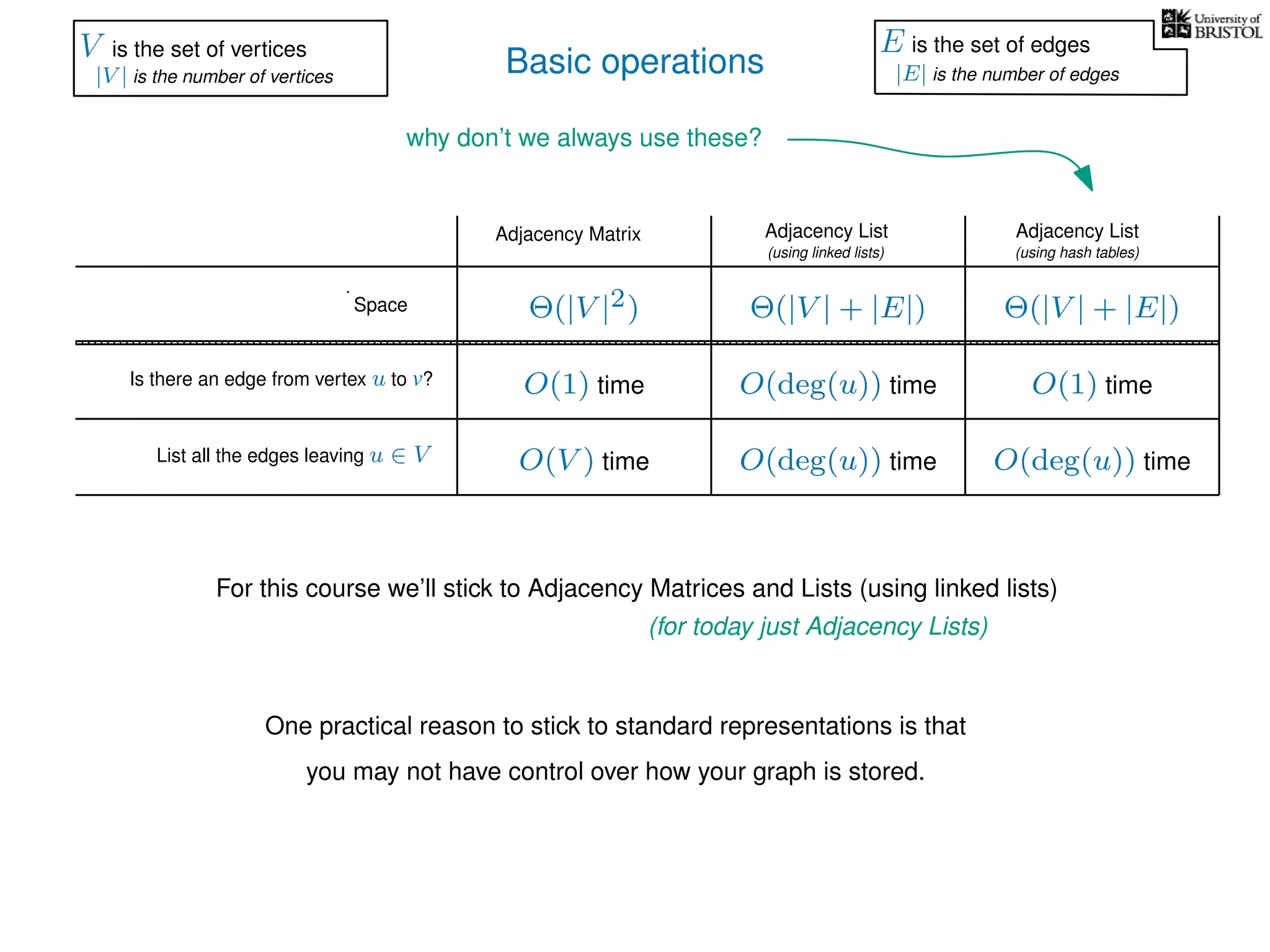
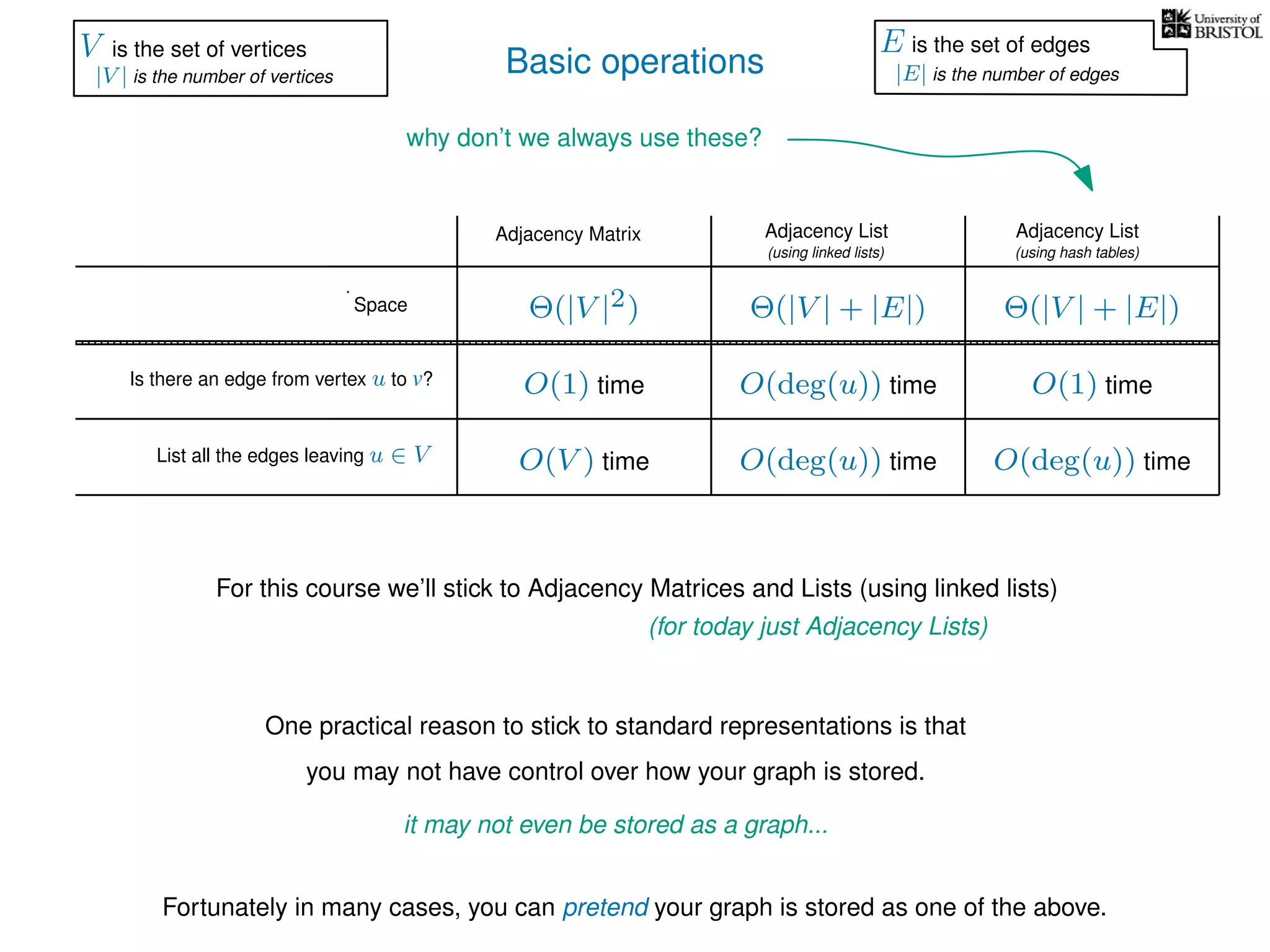
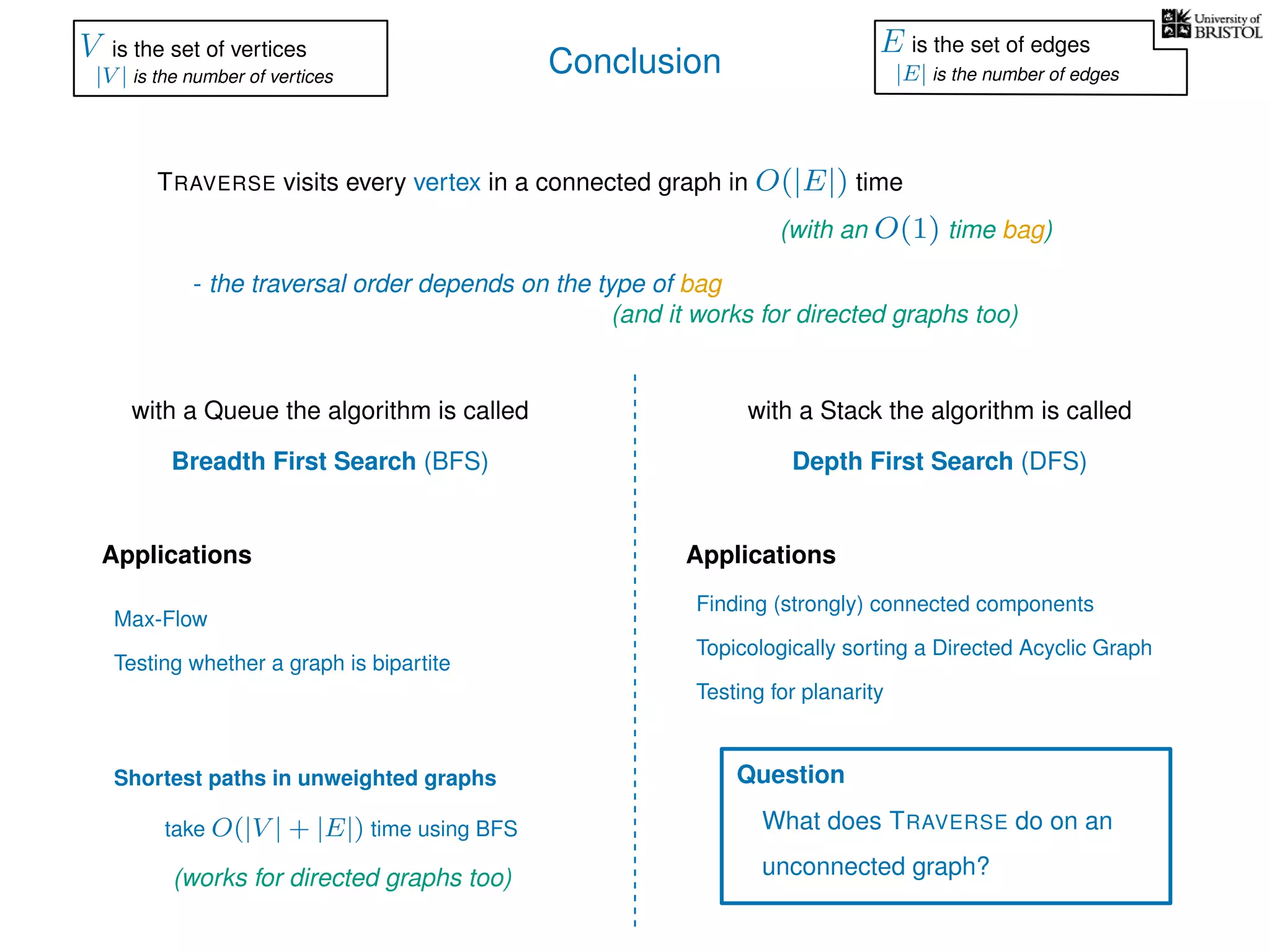
V is the set of vertices
|V | is the number of vertices
E is the set of edges
|E| is the number of edges](https://image.slidesharecdn.com/dsa-w3l1-160916143030/75/Depth-First-Search-and-Breadth-First-Search-134-2048.jpg)
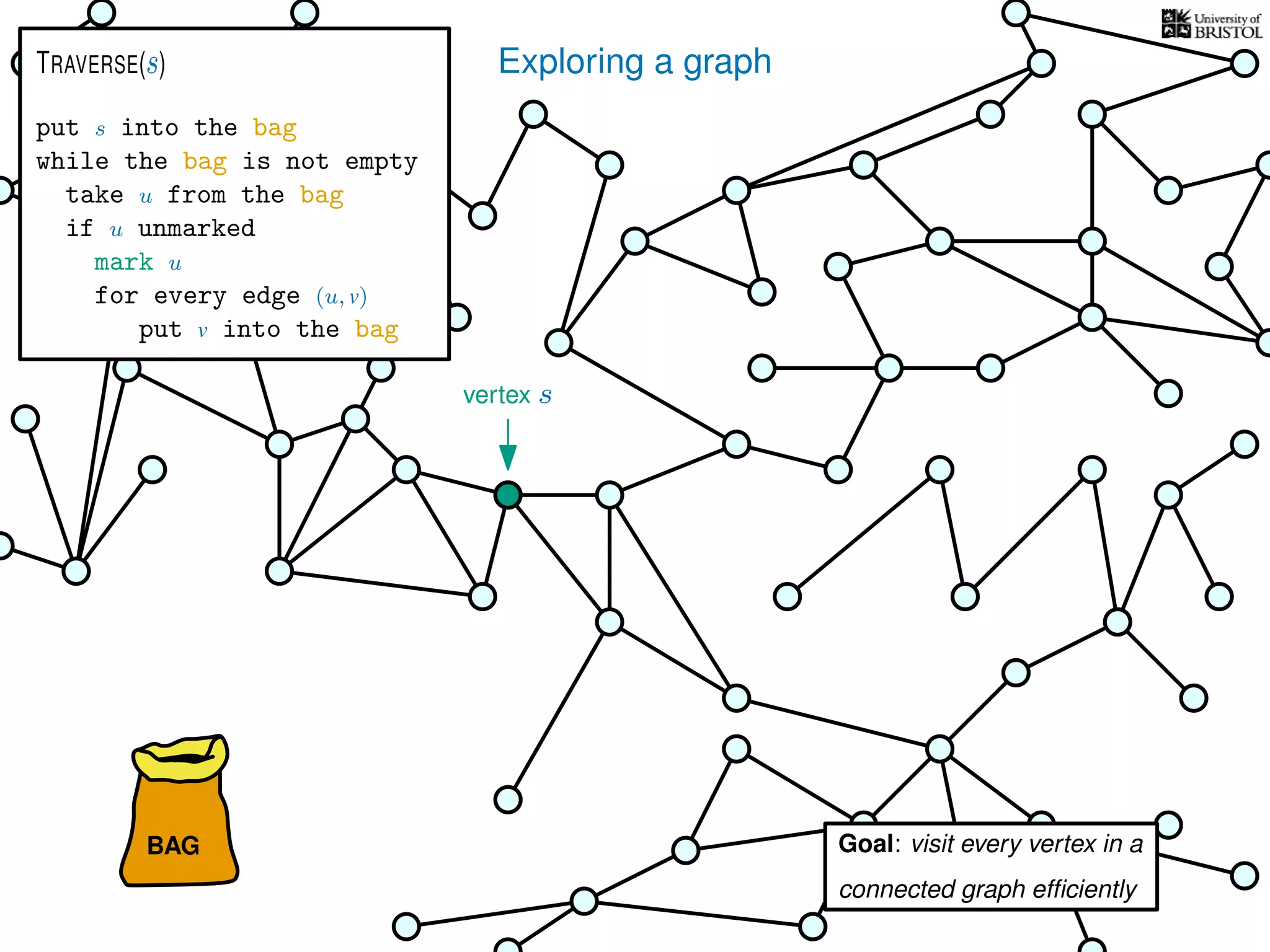
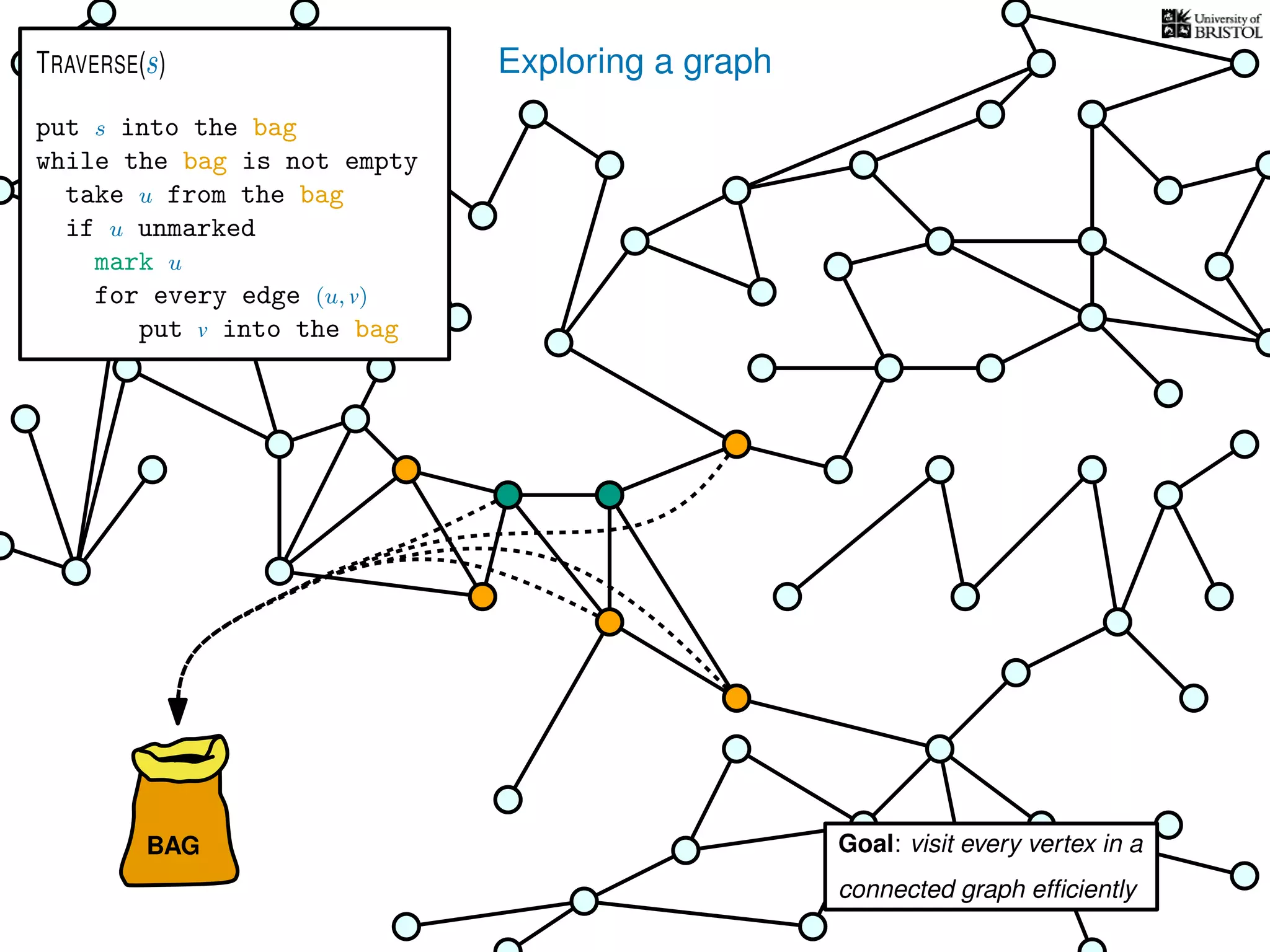
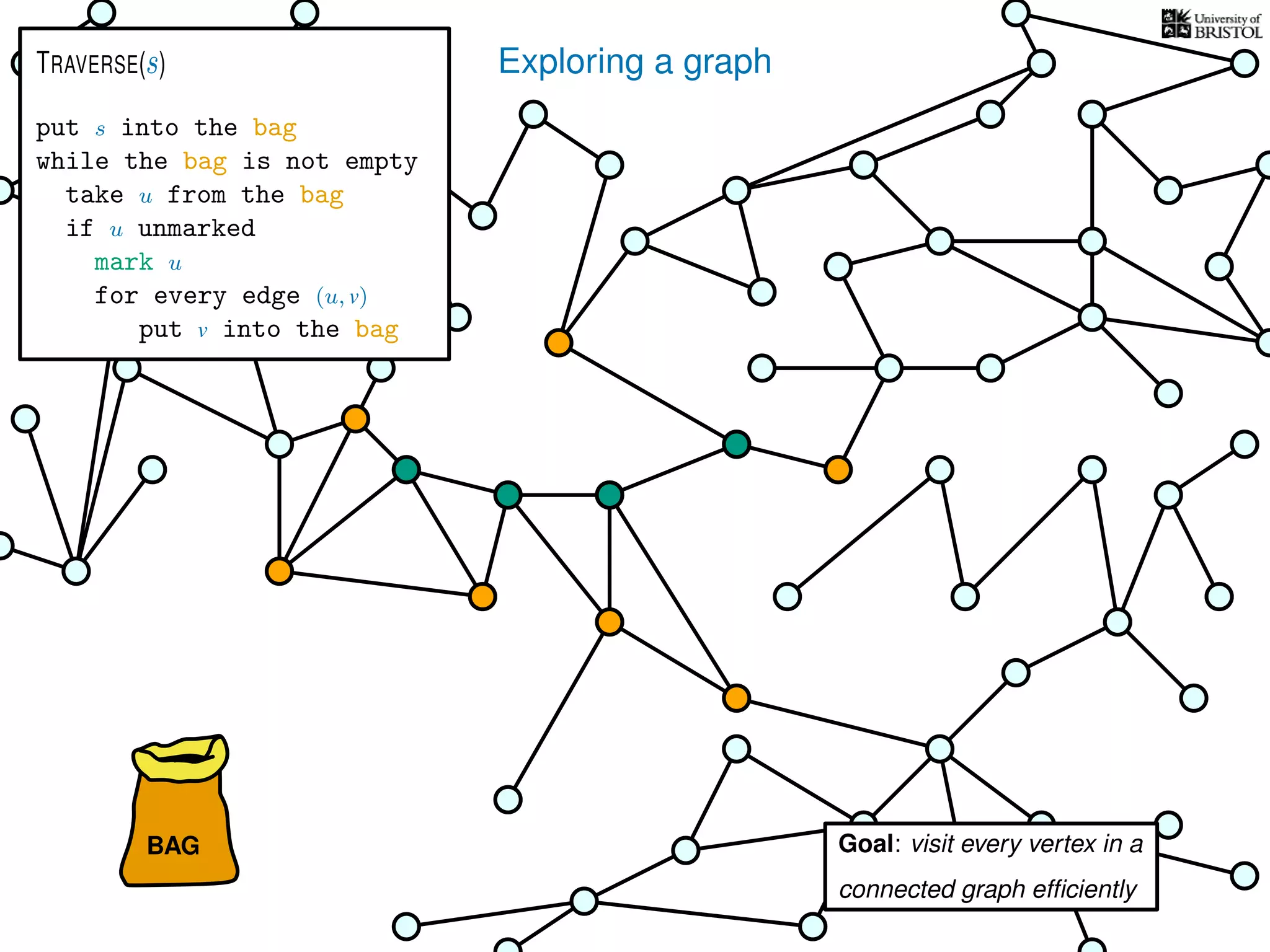
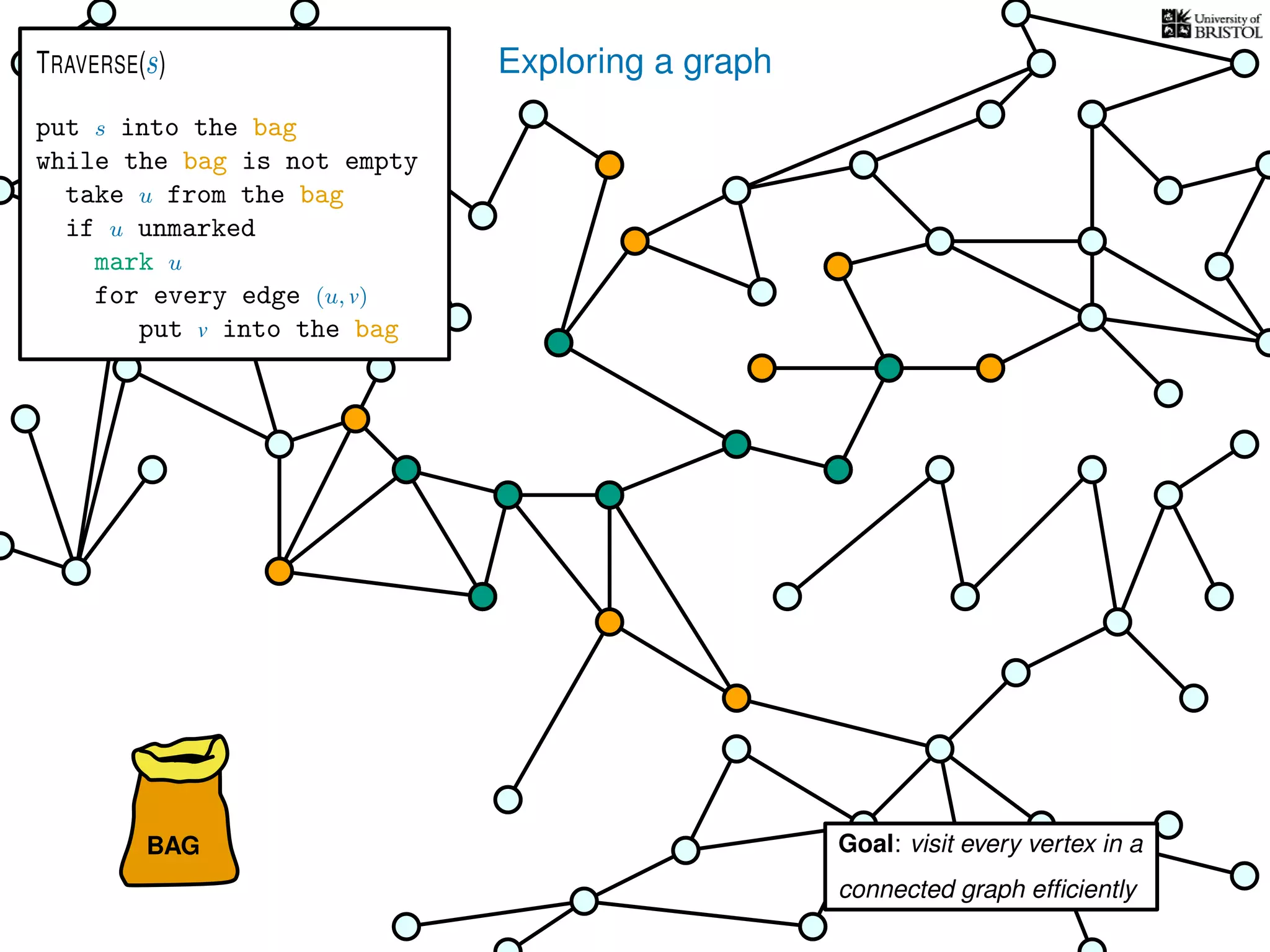
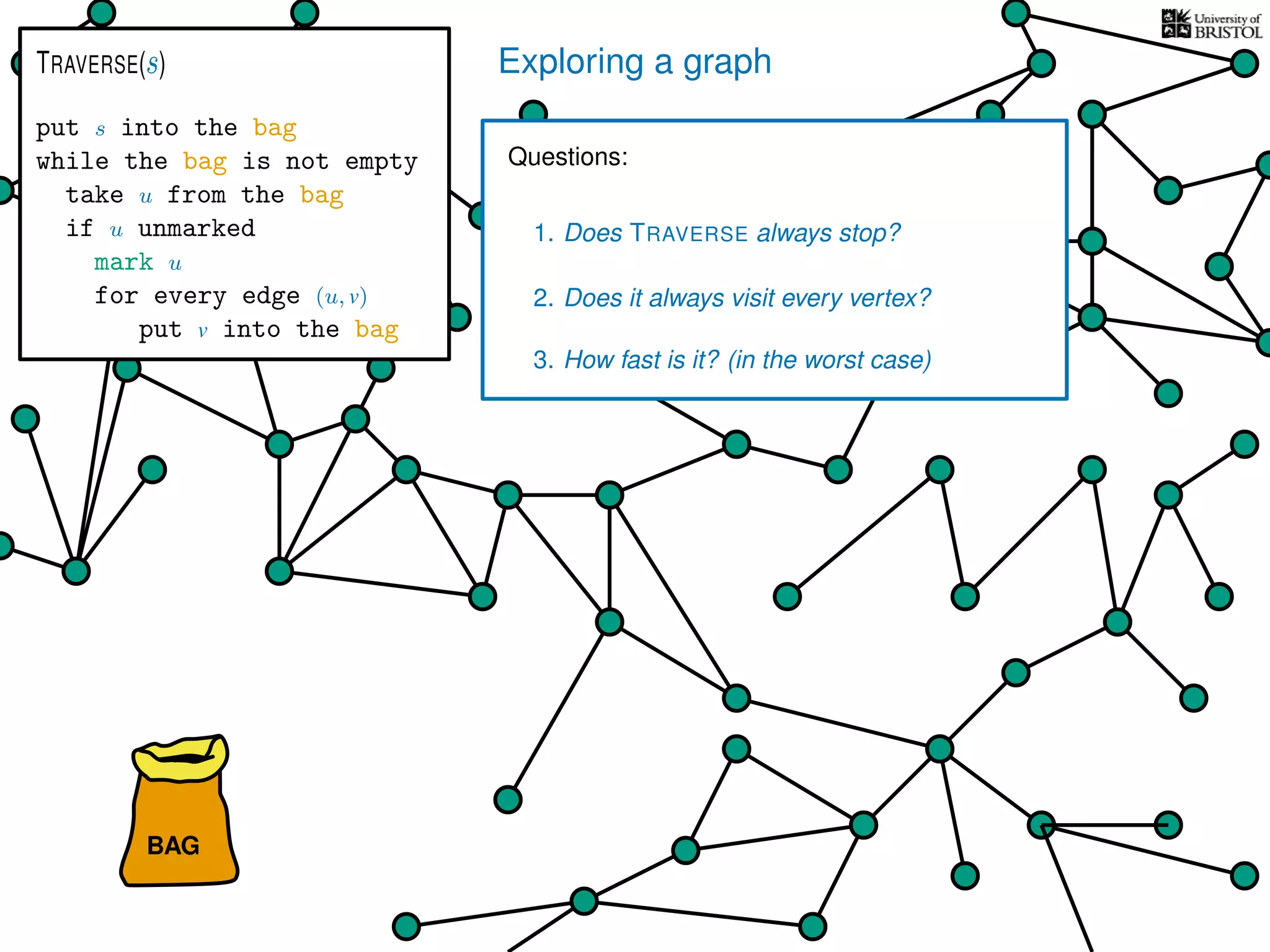
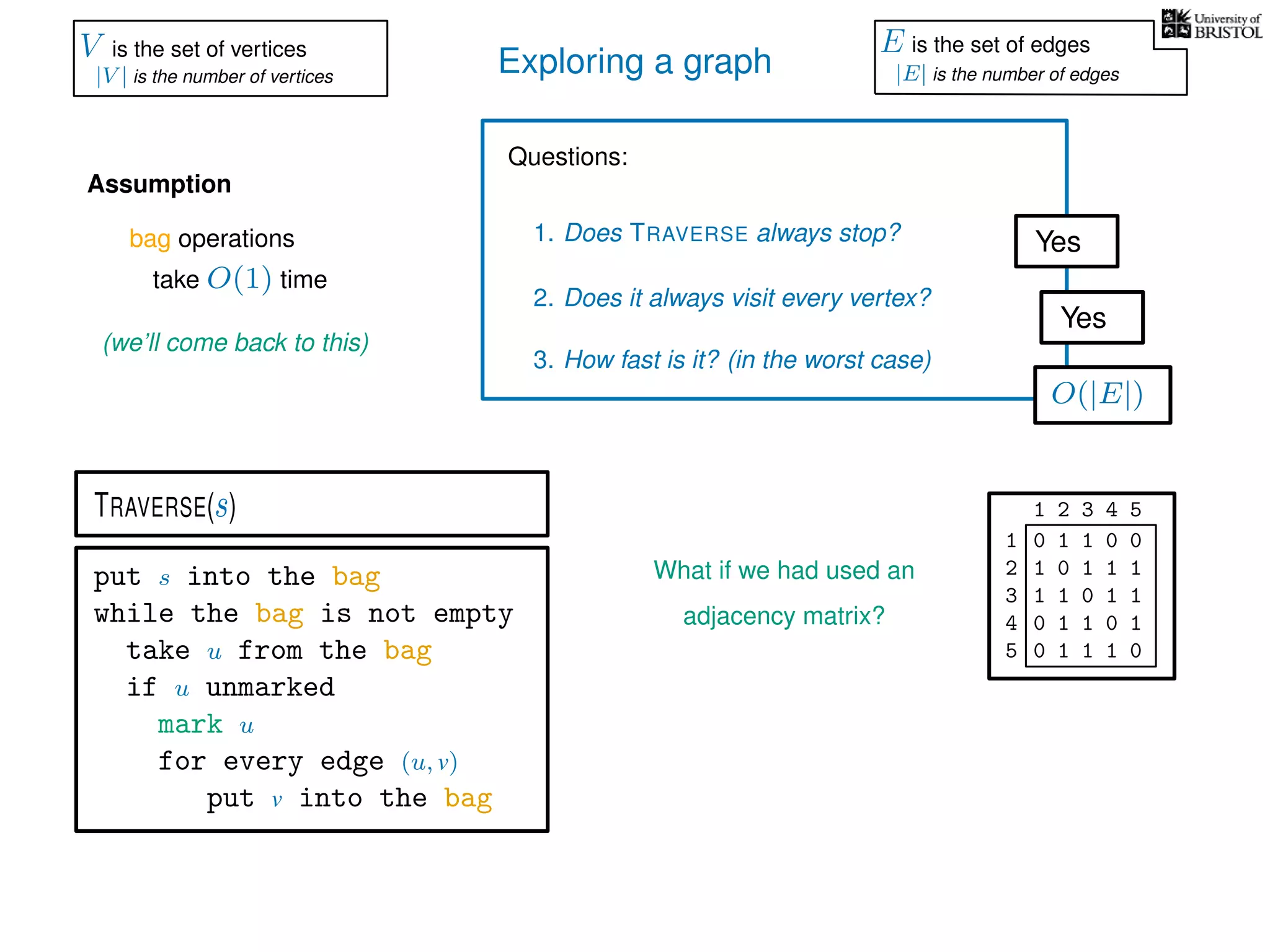
![Exploring a graph
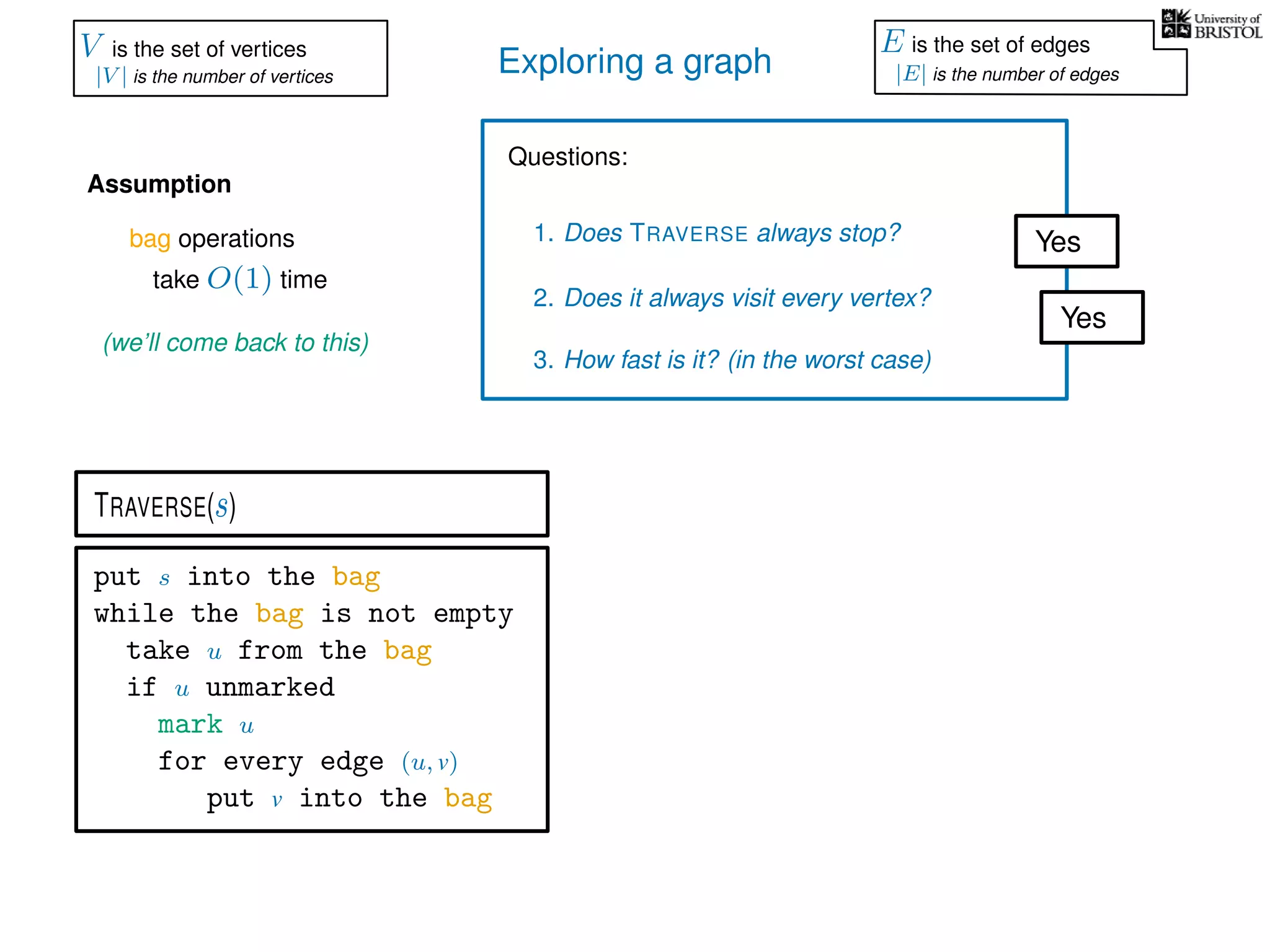
Questions:
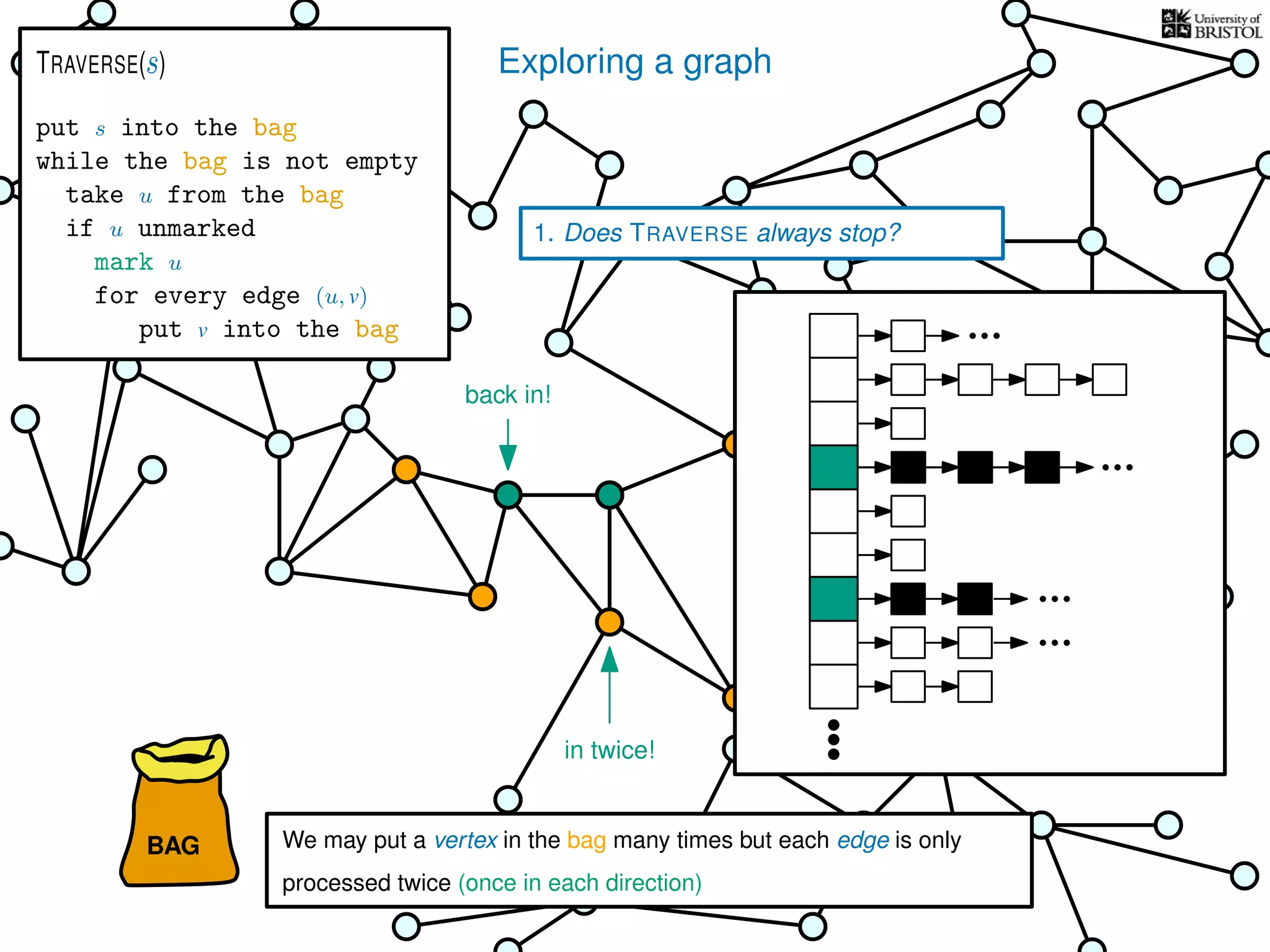
1. Does TRAVERSE always stop?
2. Does it always visit every vertex?
Yes
Yes
3. How fast is it? (in the worst case)
Time complexity:
Assumption
(we’ll come back to this)
(store an array where mark[u] = 1 iff u is marked)
O(1) time every time we take from the bag
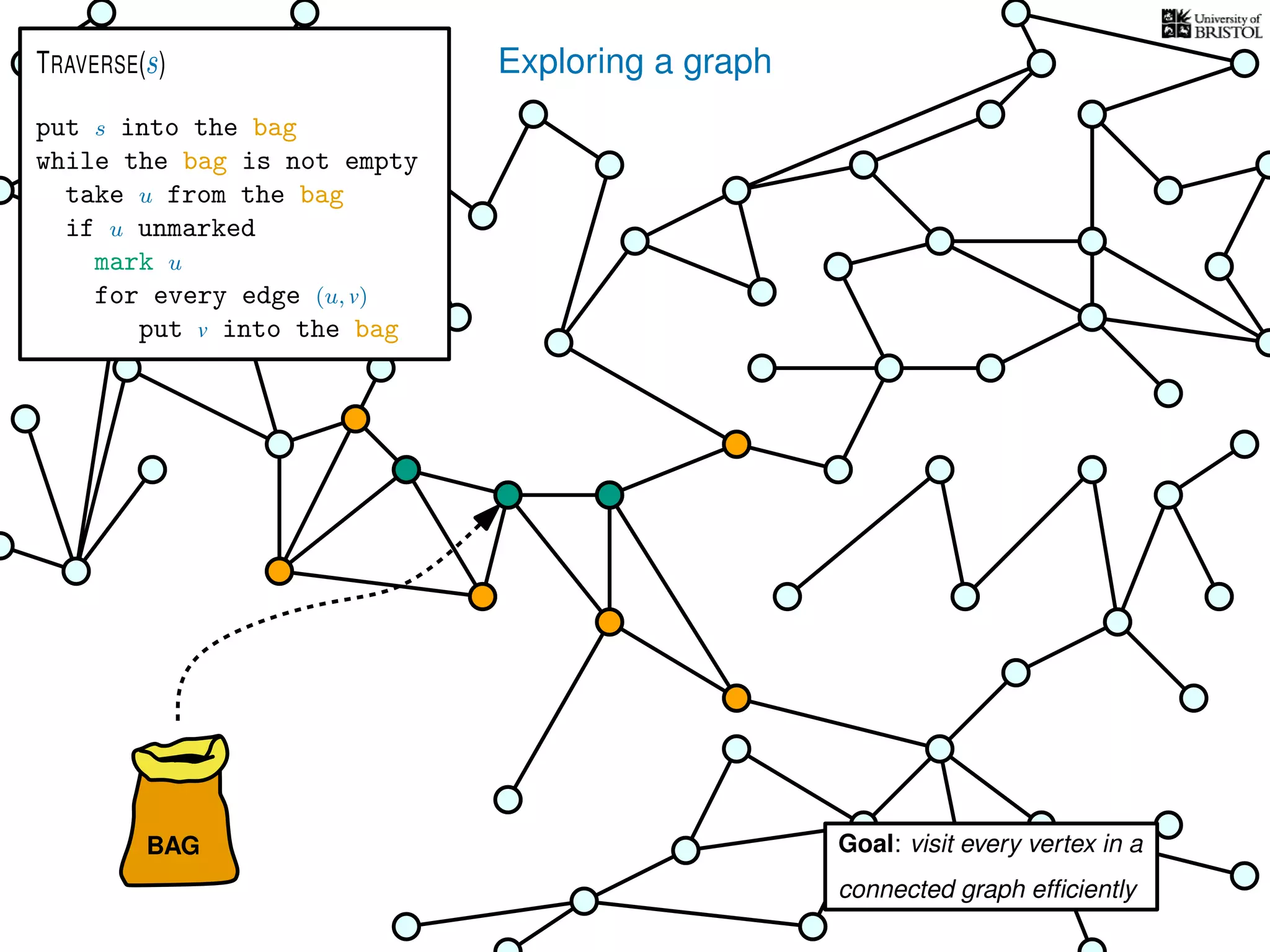
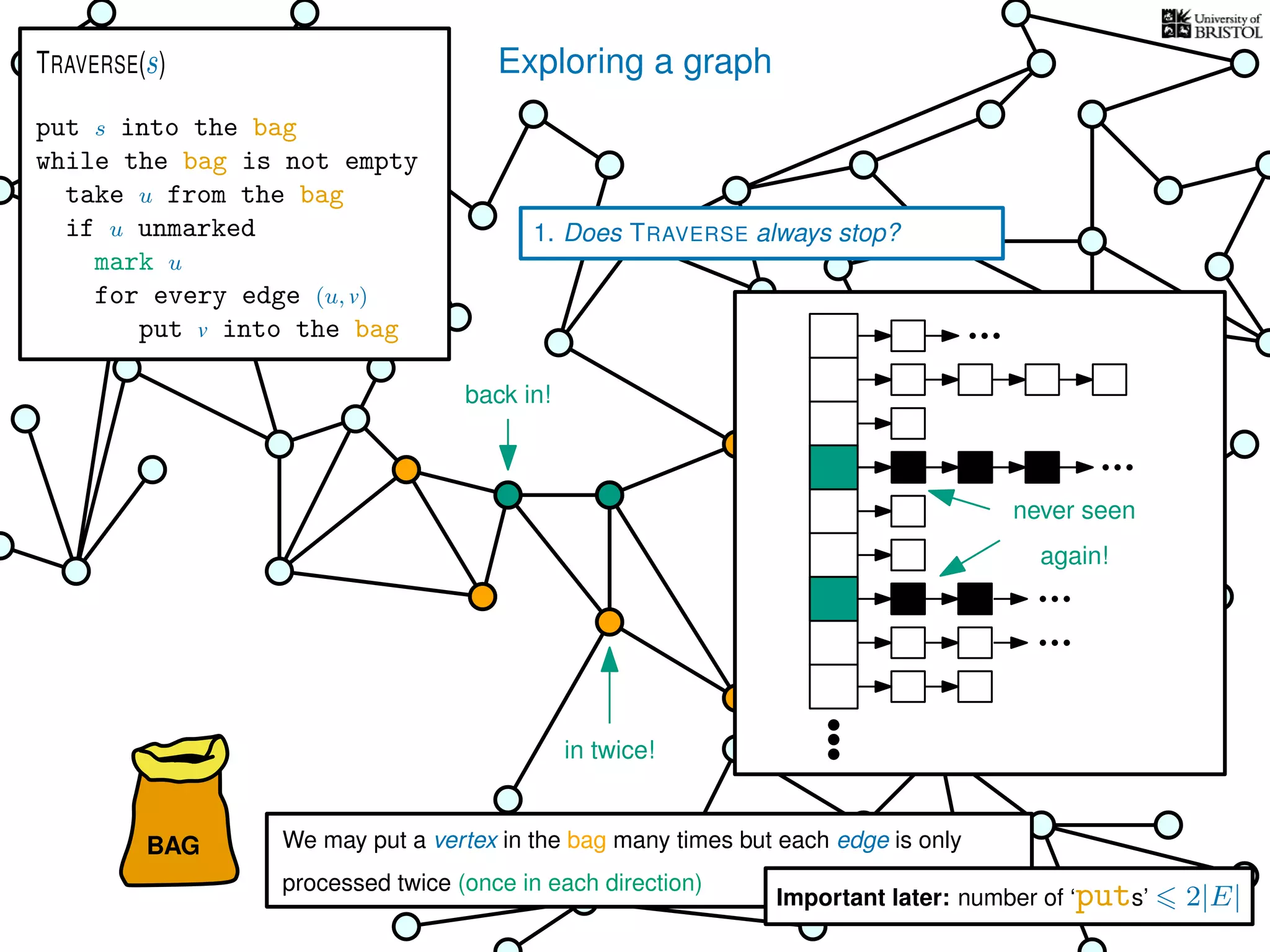
put s into the bag
while the bag is not empty
take u from the bag
if u unmarked
mark u
for every edge (u, v)
put v into the bag
TRAVERSE(s)
bag operations
take O(1) time
O(1) time every time we put into the bag
V is the set of vertices
|V | is the number of vertices
E is the set of edges
|E| is the number of edges](https://image.slidesharecdn.com/dsa-w3l1-160916143030/75/Depth-First-Search-and-Breadth-First-Search-135-2048.jpg)
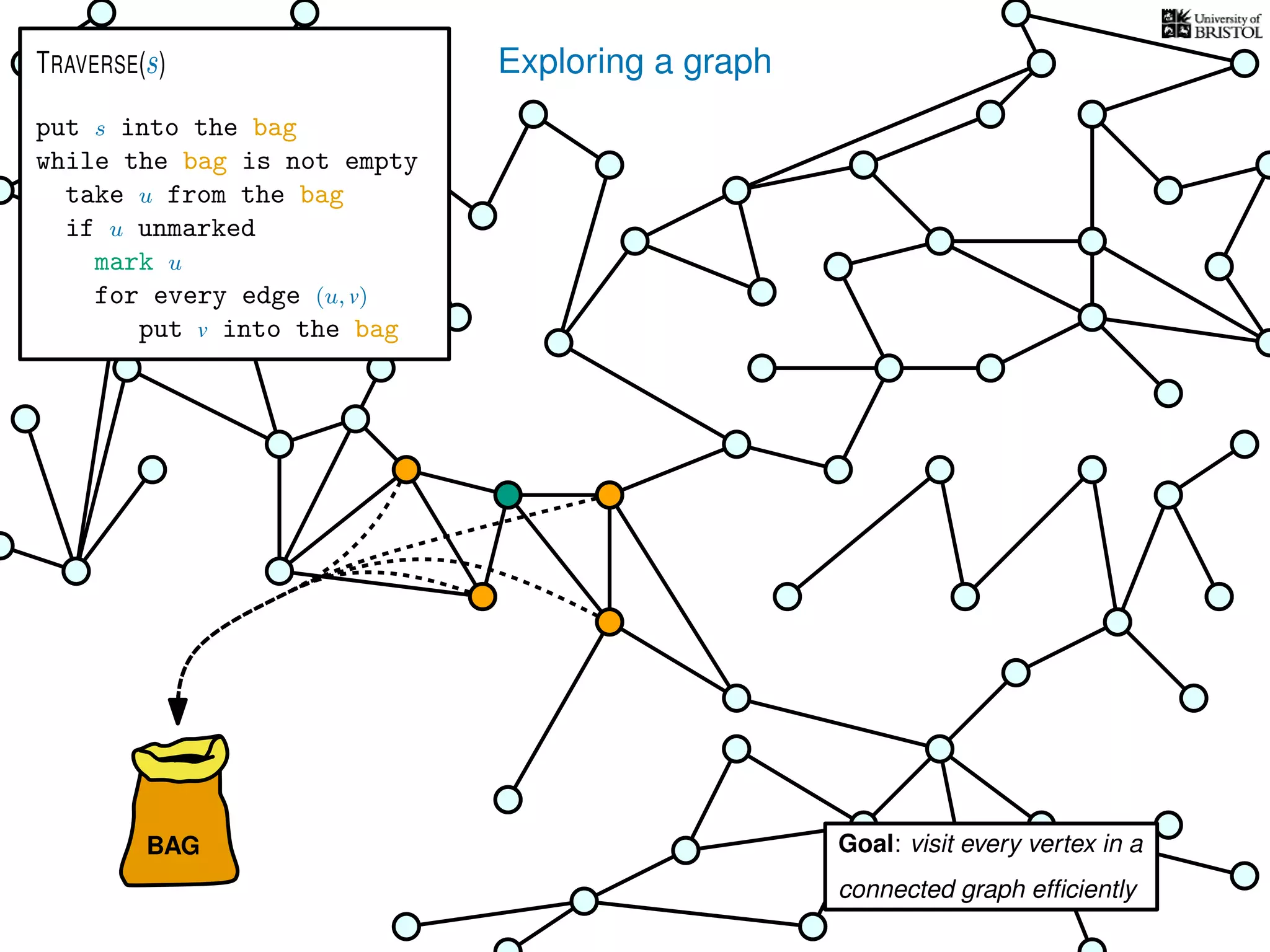
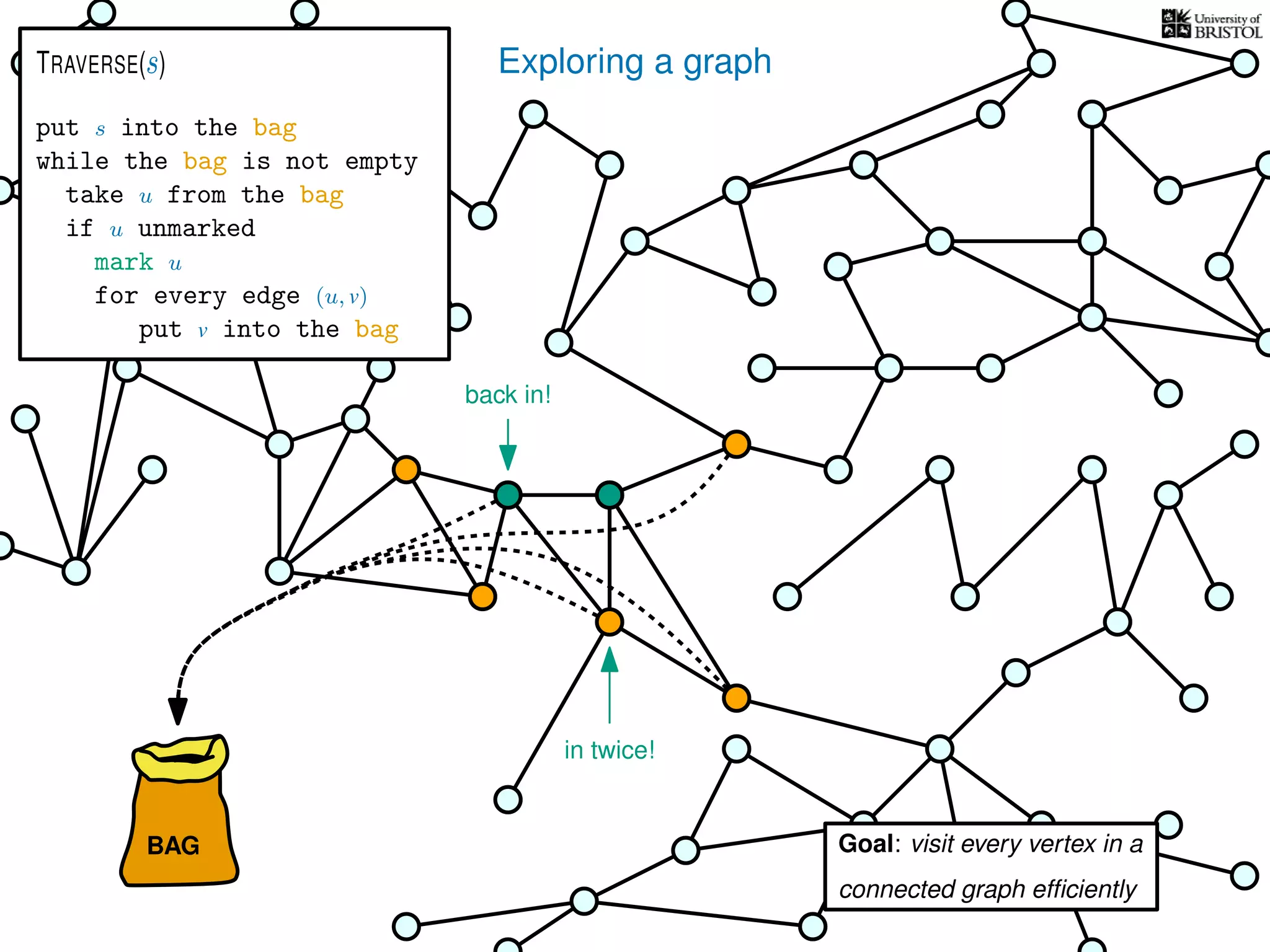
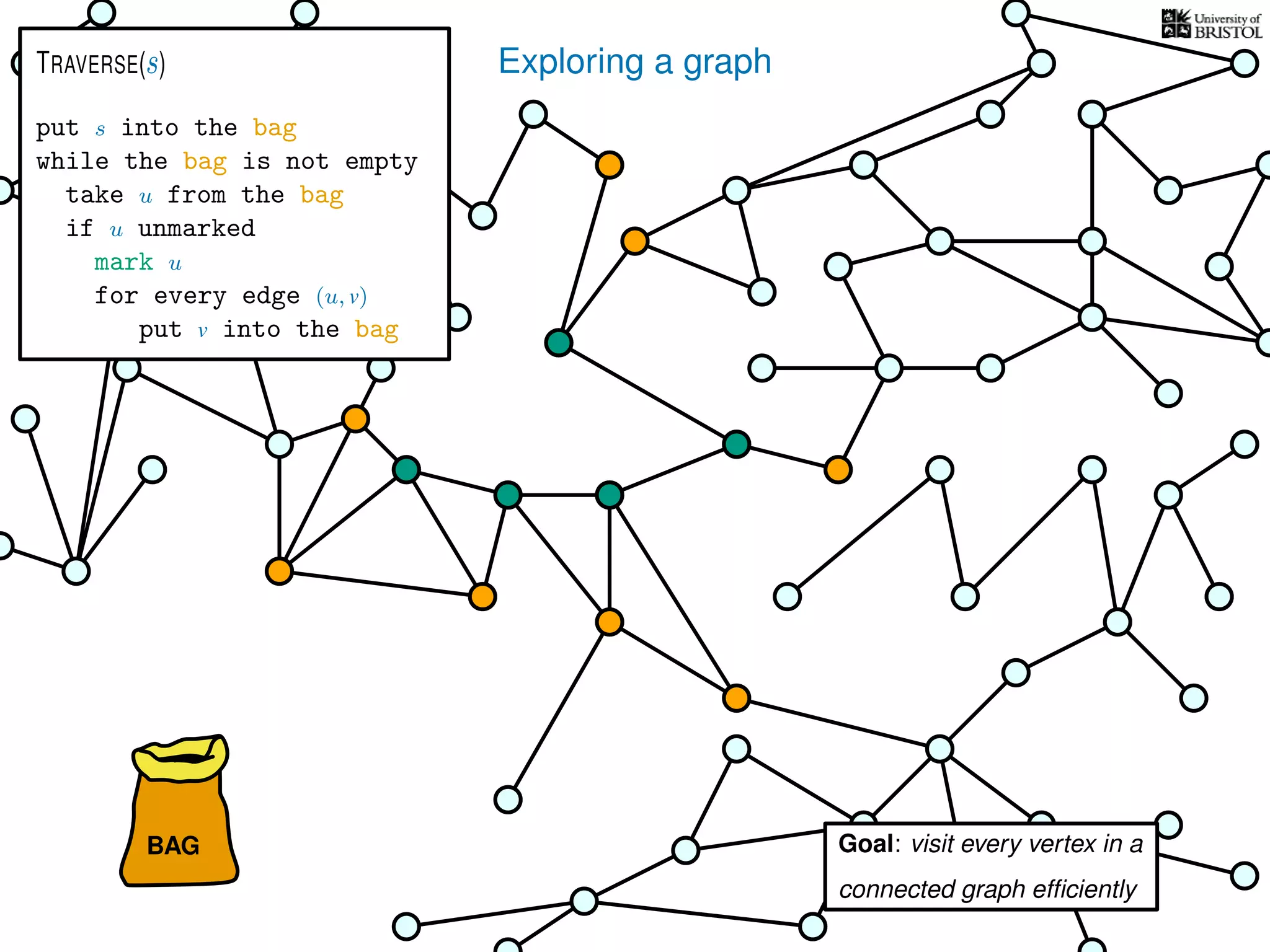
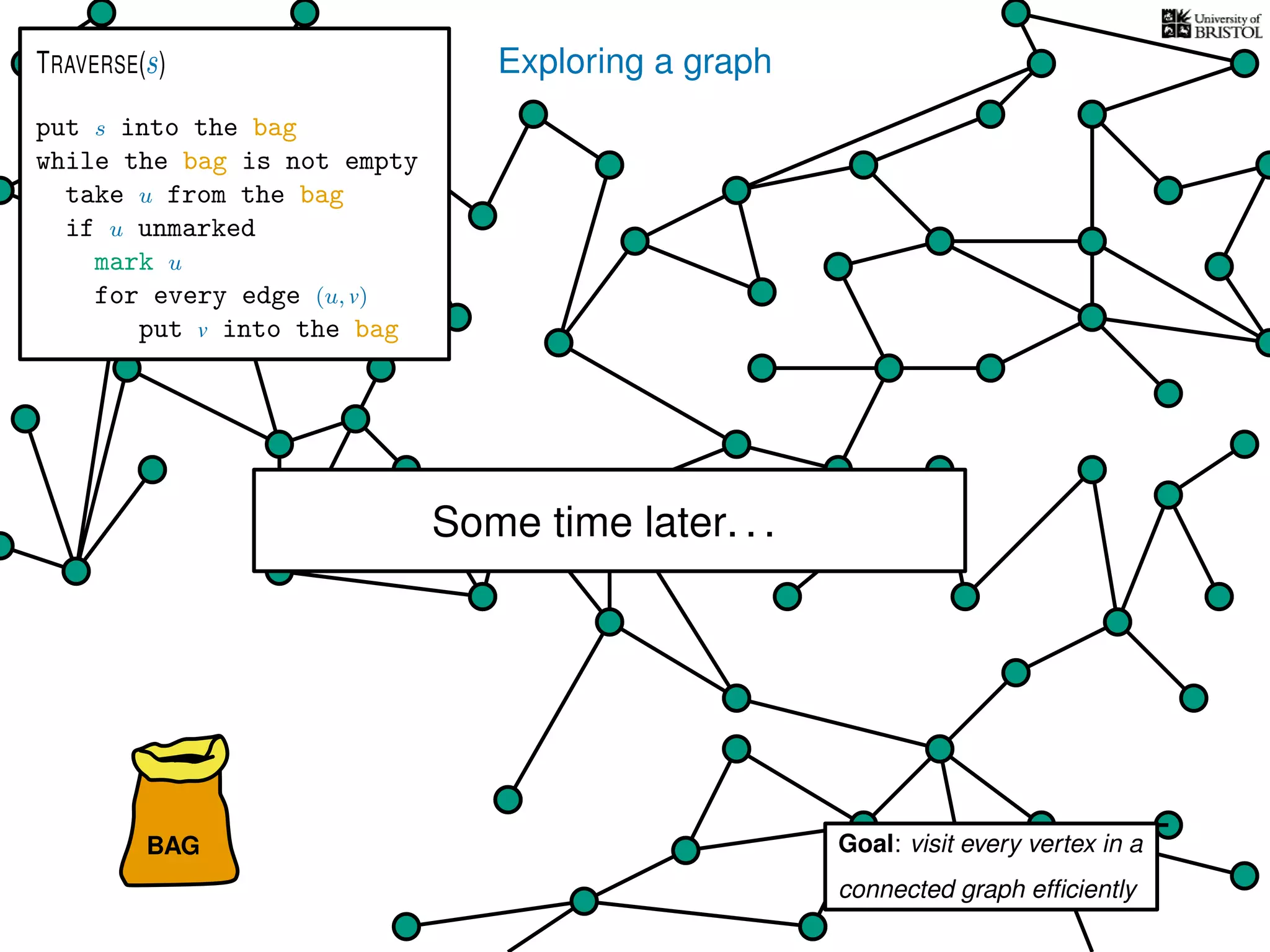
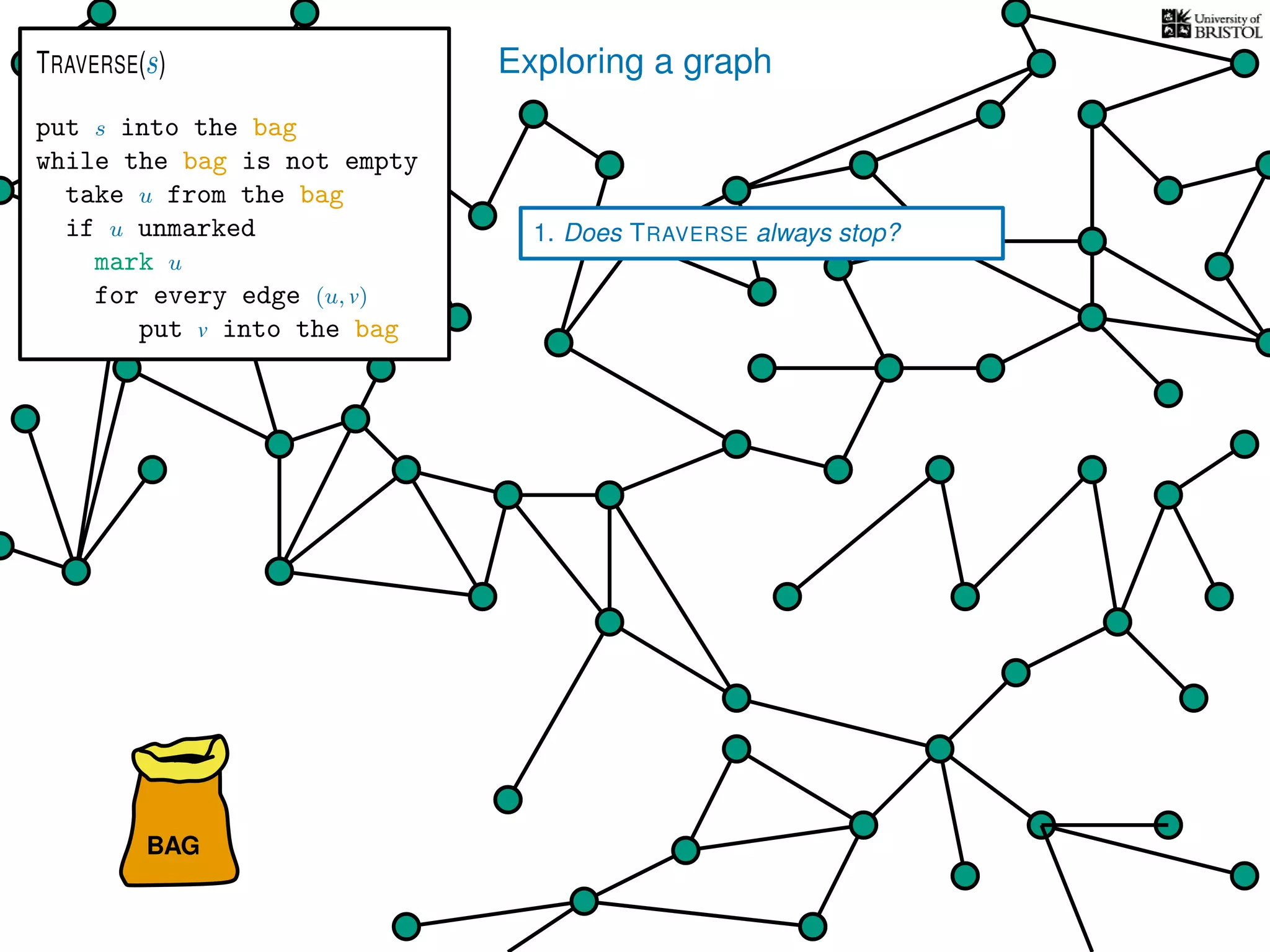
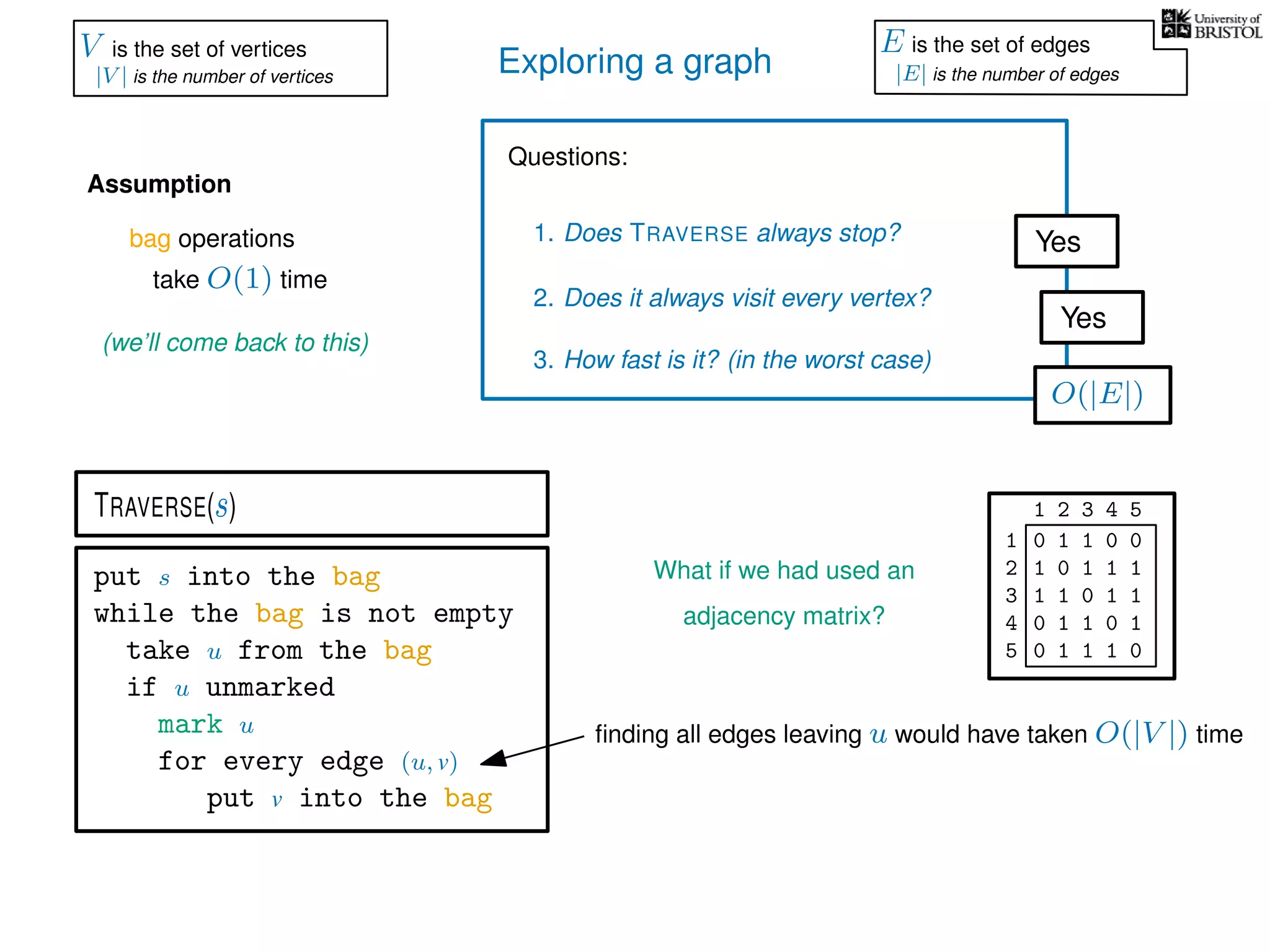
![Exploring a graph
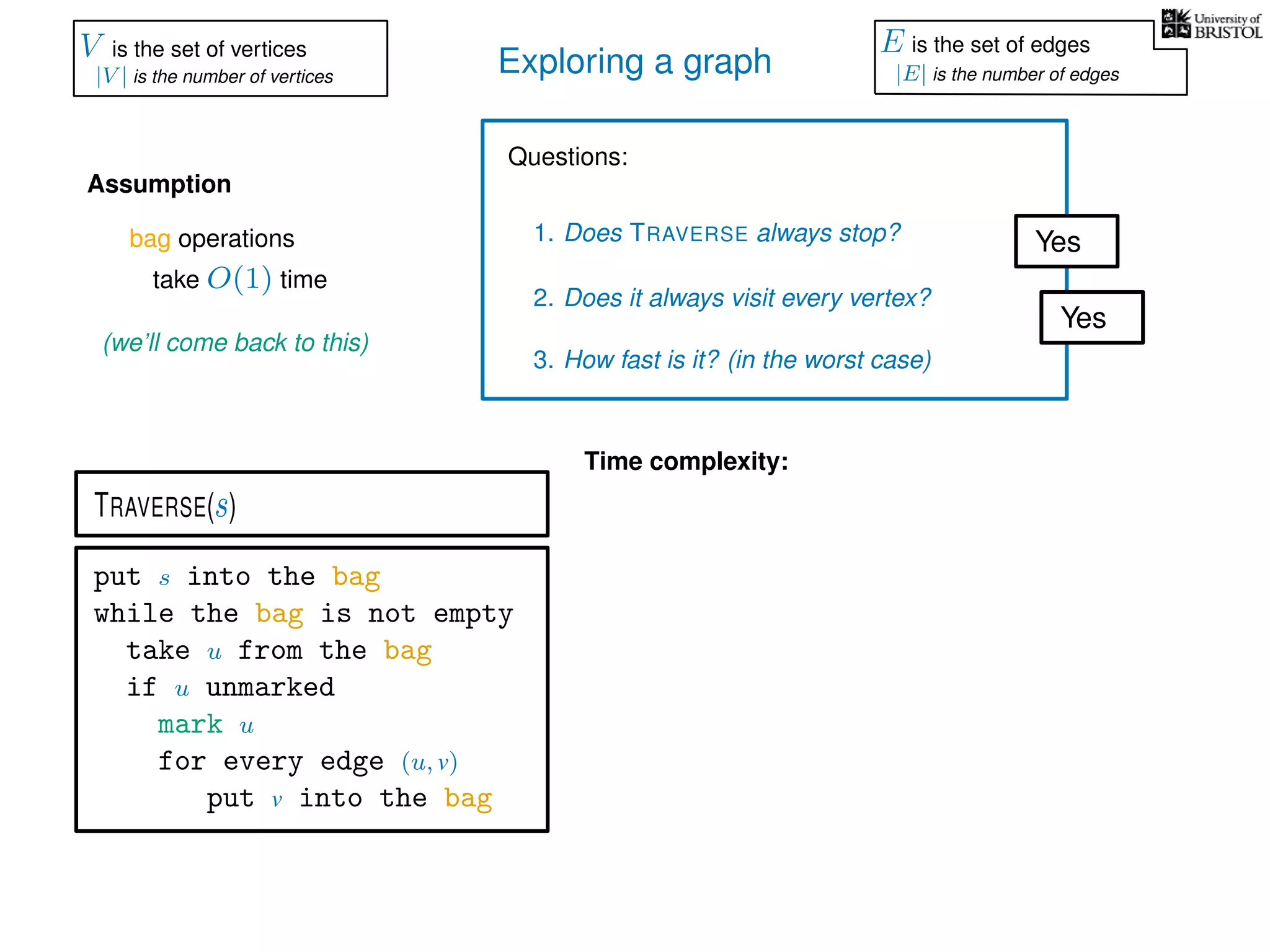
Questions:
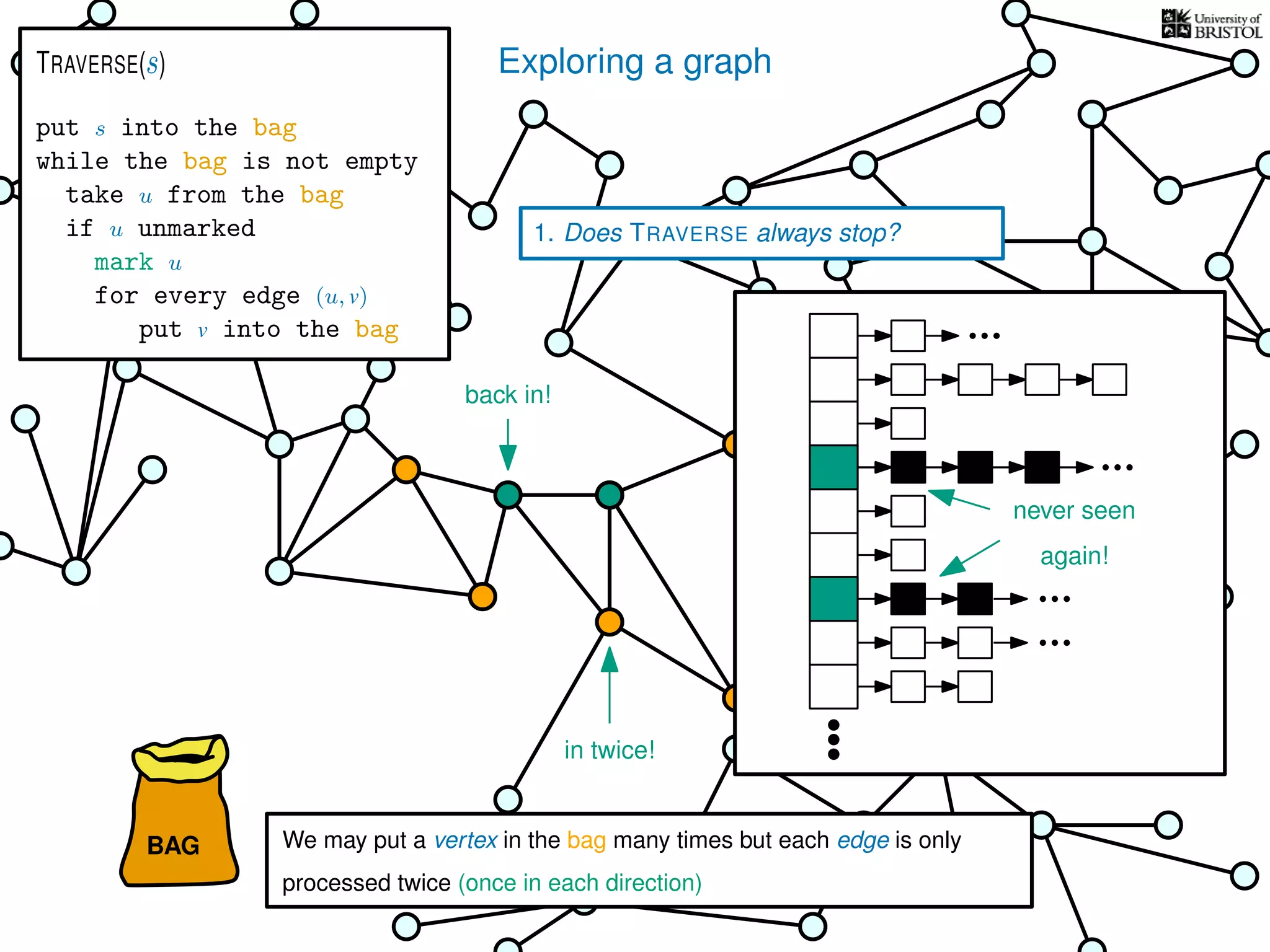
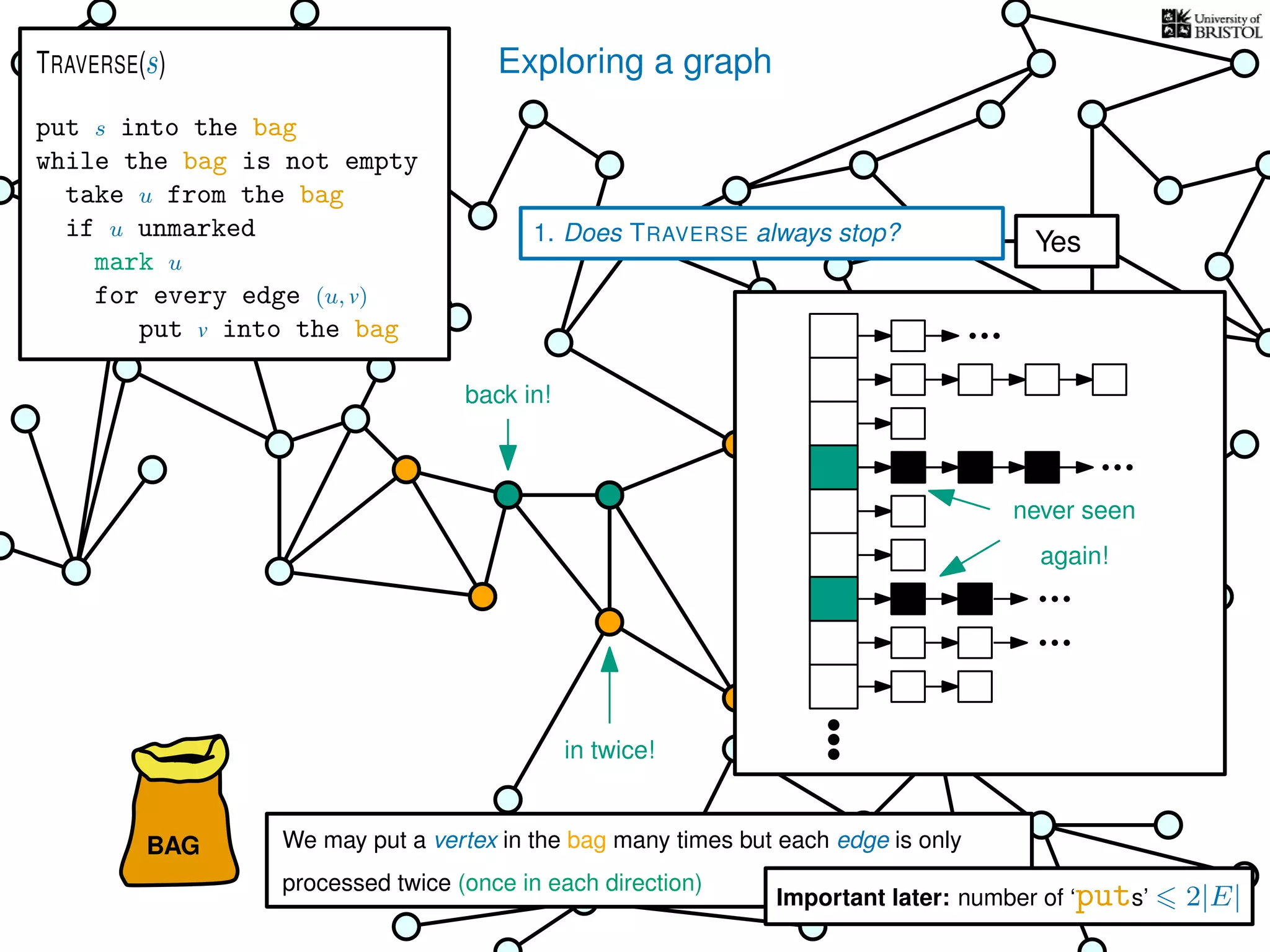
1. Does TRAVERSE always stop?
2. Does it always visit every vertex?
Yes
Yes
3. How fast is it? (in the worst case)
Time complexity:
Assumption
(we’ll come back to this)
(store an array where mark[u] = 1 iff u is marked)
O(1) time every time we take from the bag
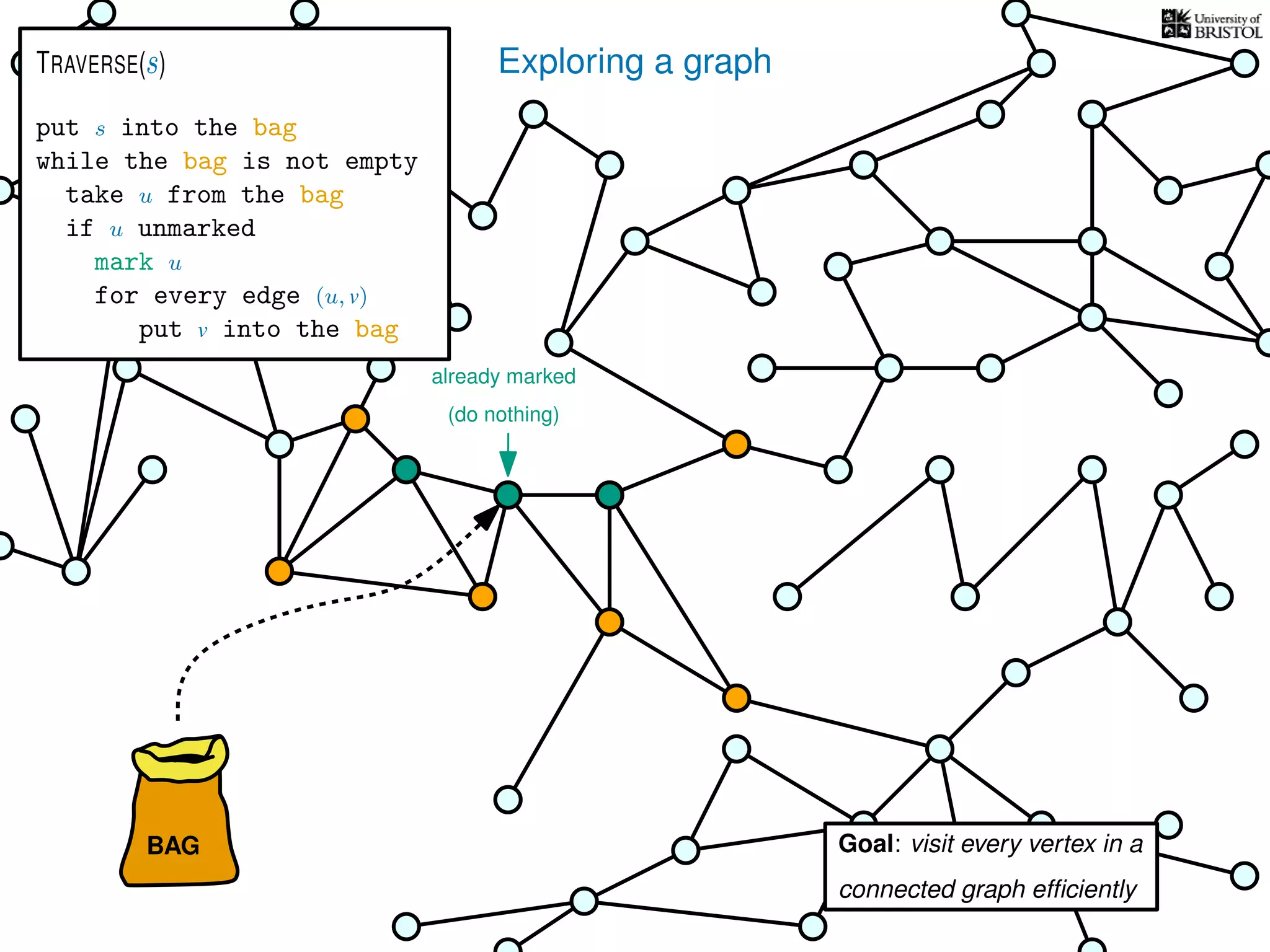
put s into the bag
while the bag is not empty
take u from the bag
if u unmarked
mark u
for every edge (u, v)
put v into the bag
TRAVERSE(s)
bag operations
take O(1) time
O(1) time every time we put into the bag
What is the total number of bag operations?
V is the set of vertices
|V | is the number of vertices
E is the set of edges
|E| is the number of edges](https://image.slidesharecdn.com/dsa-w3l1-160916143030/75/Depth-First-Search-and-Breadth-First-Search-136-2048.jpg)
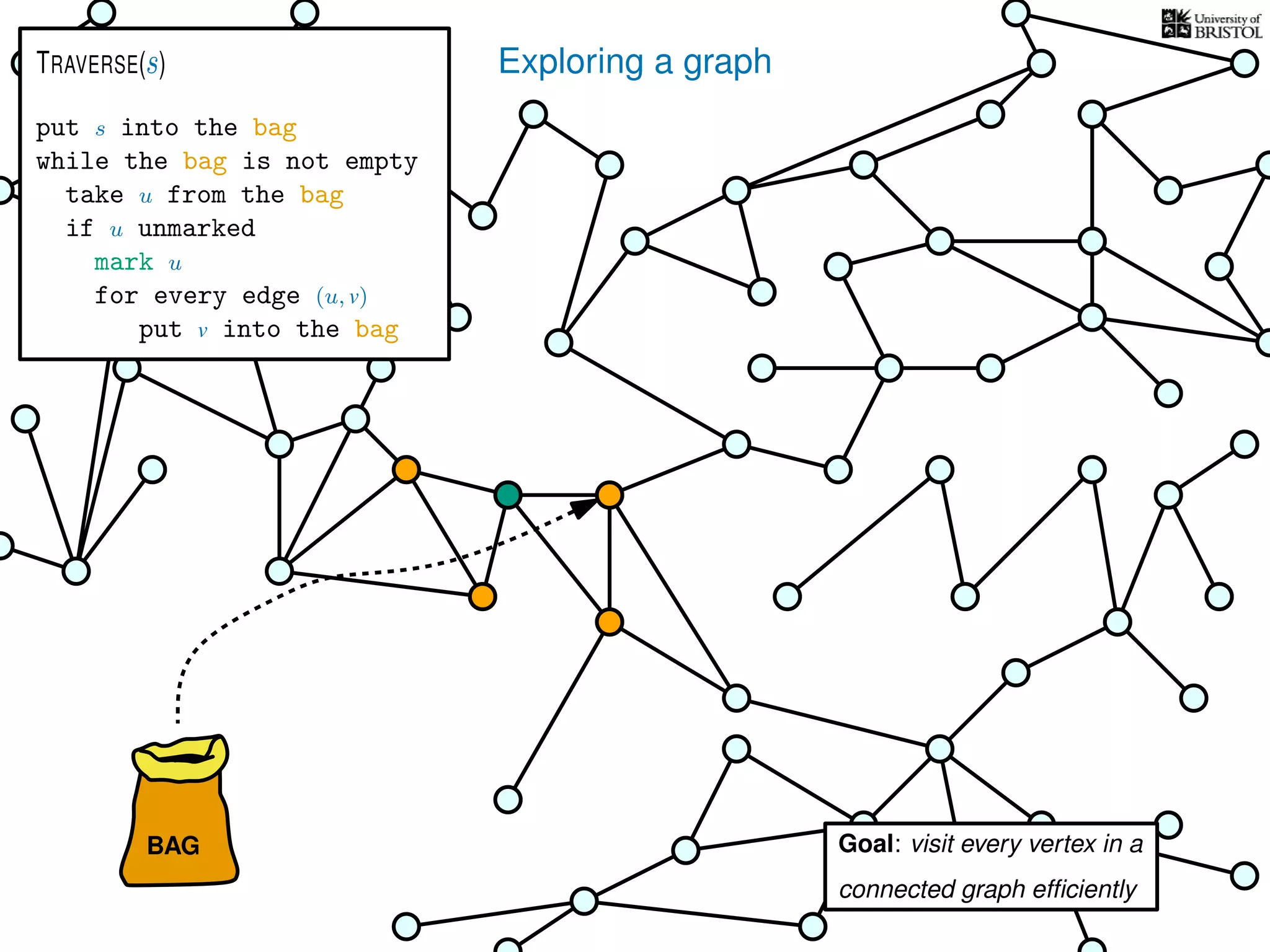
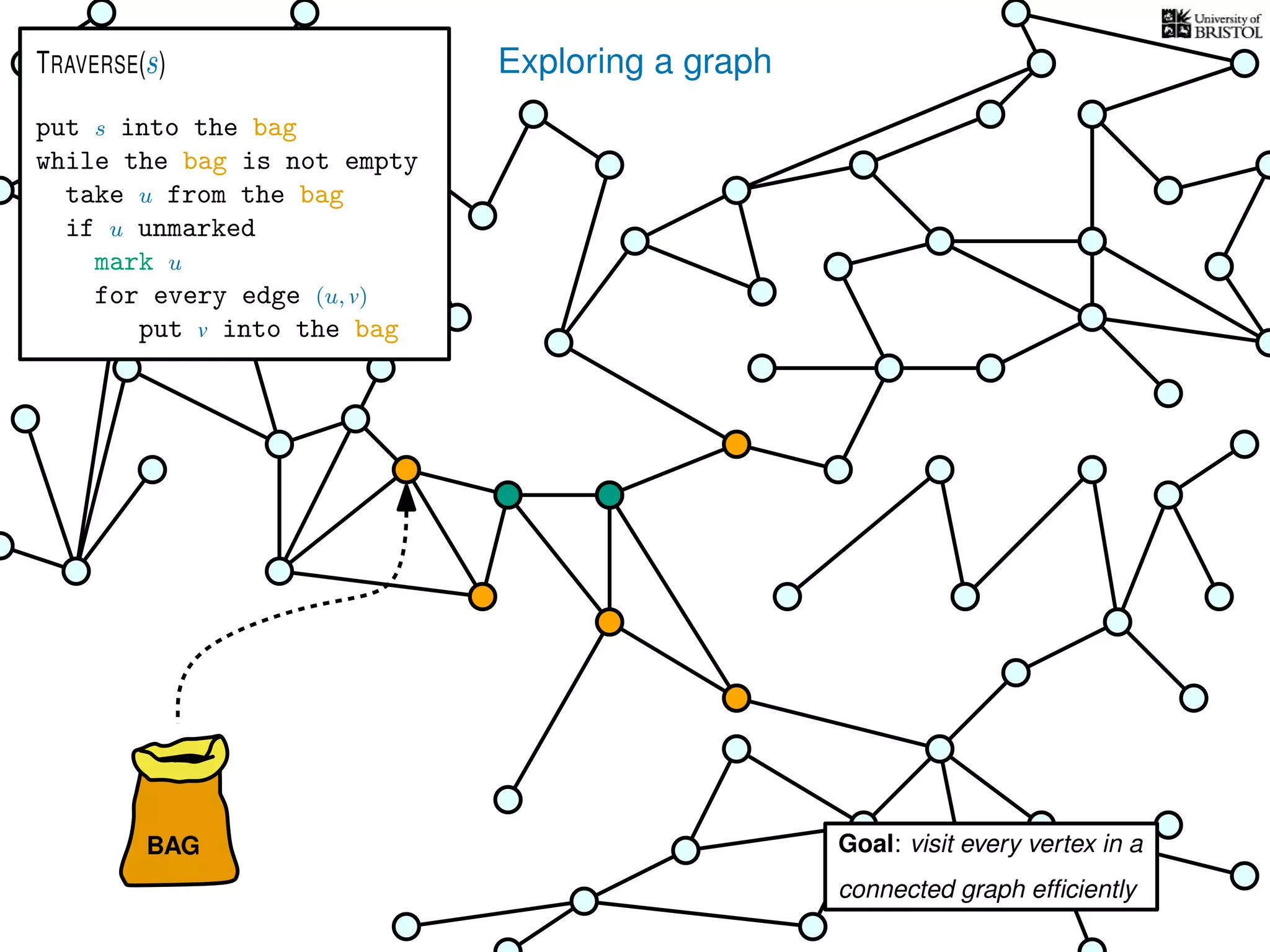
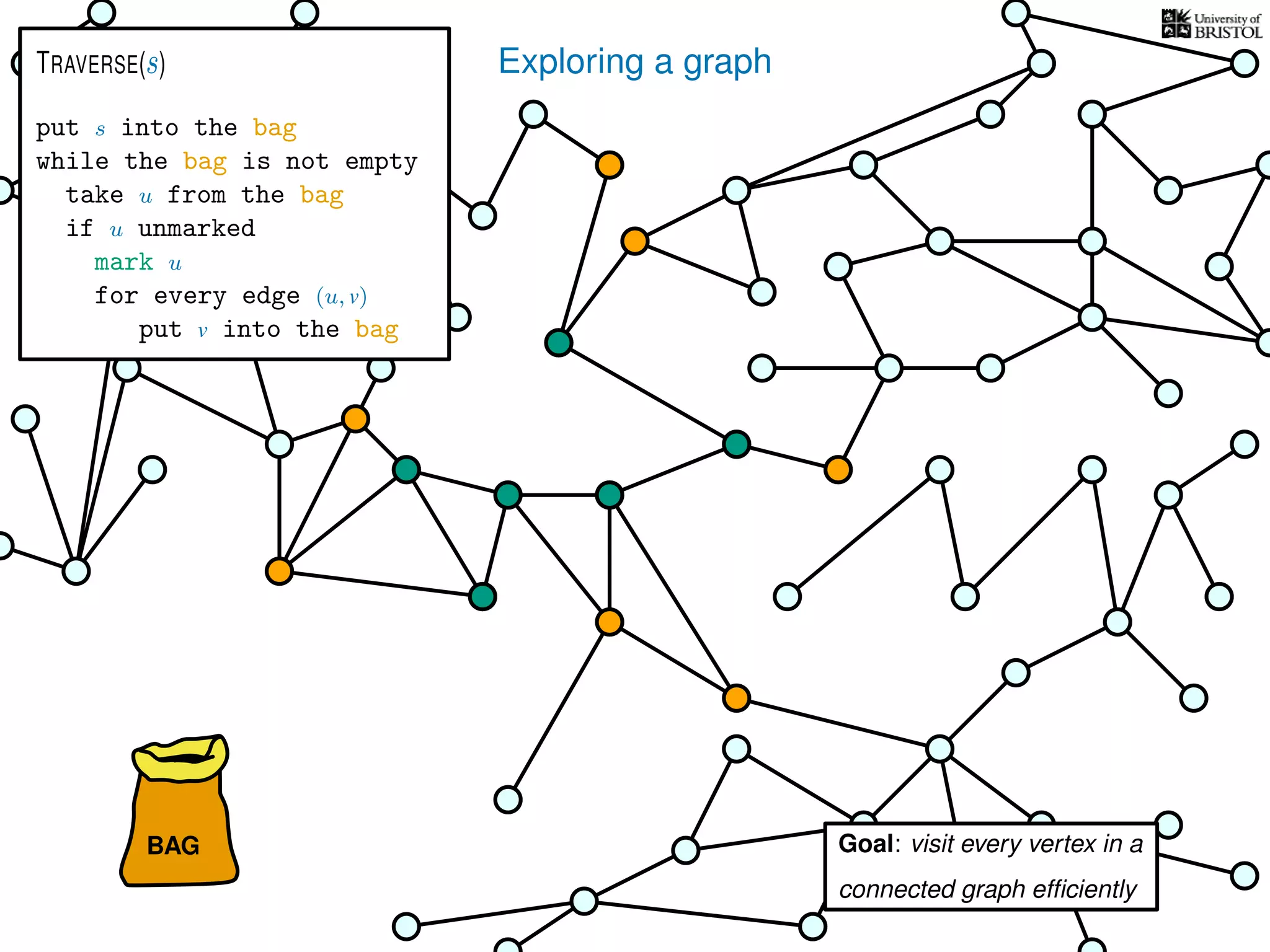
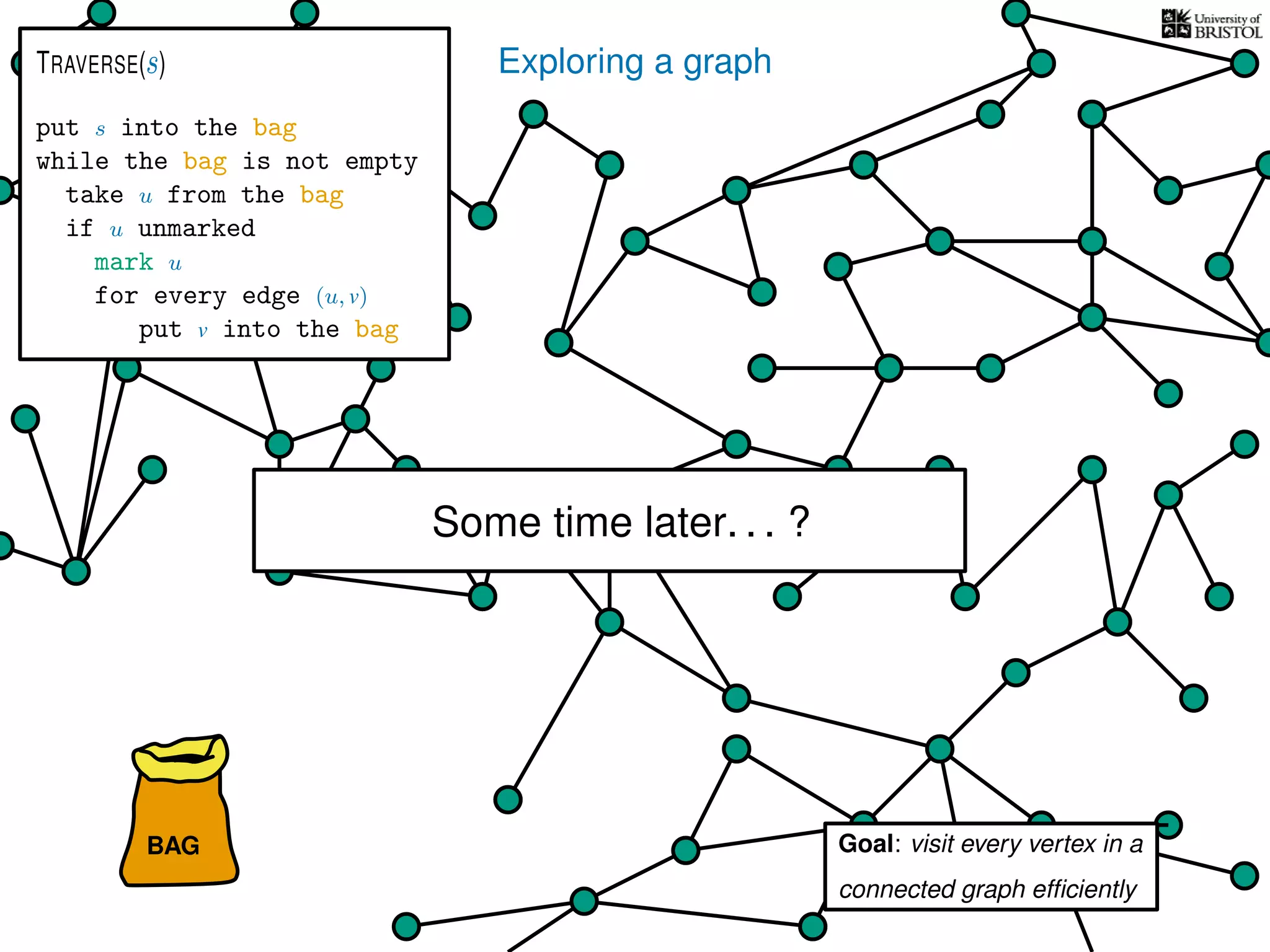
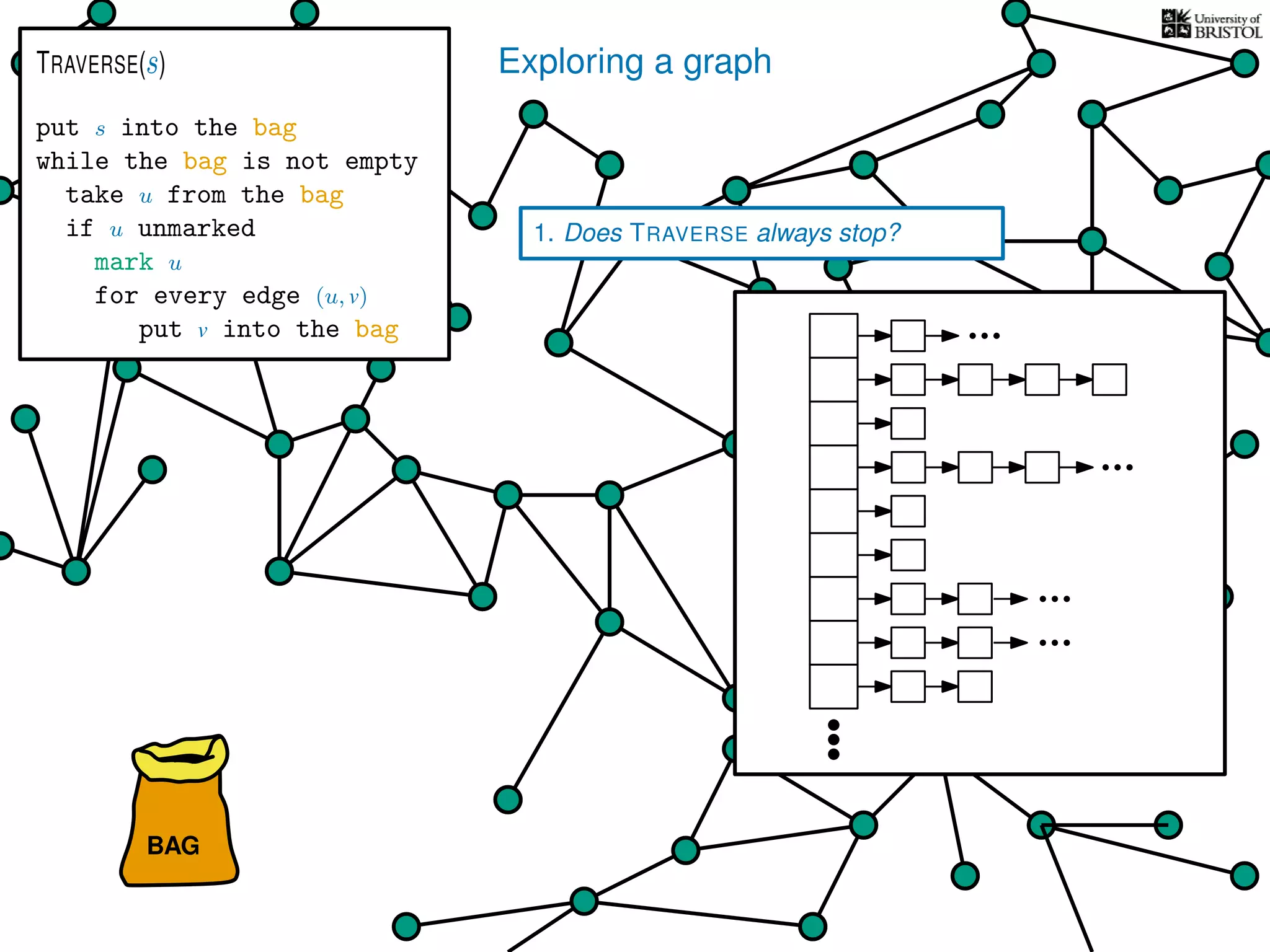
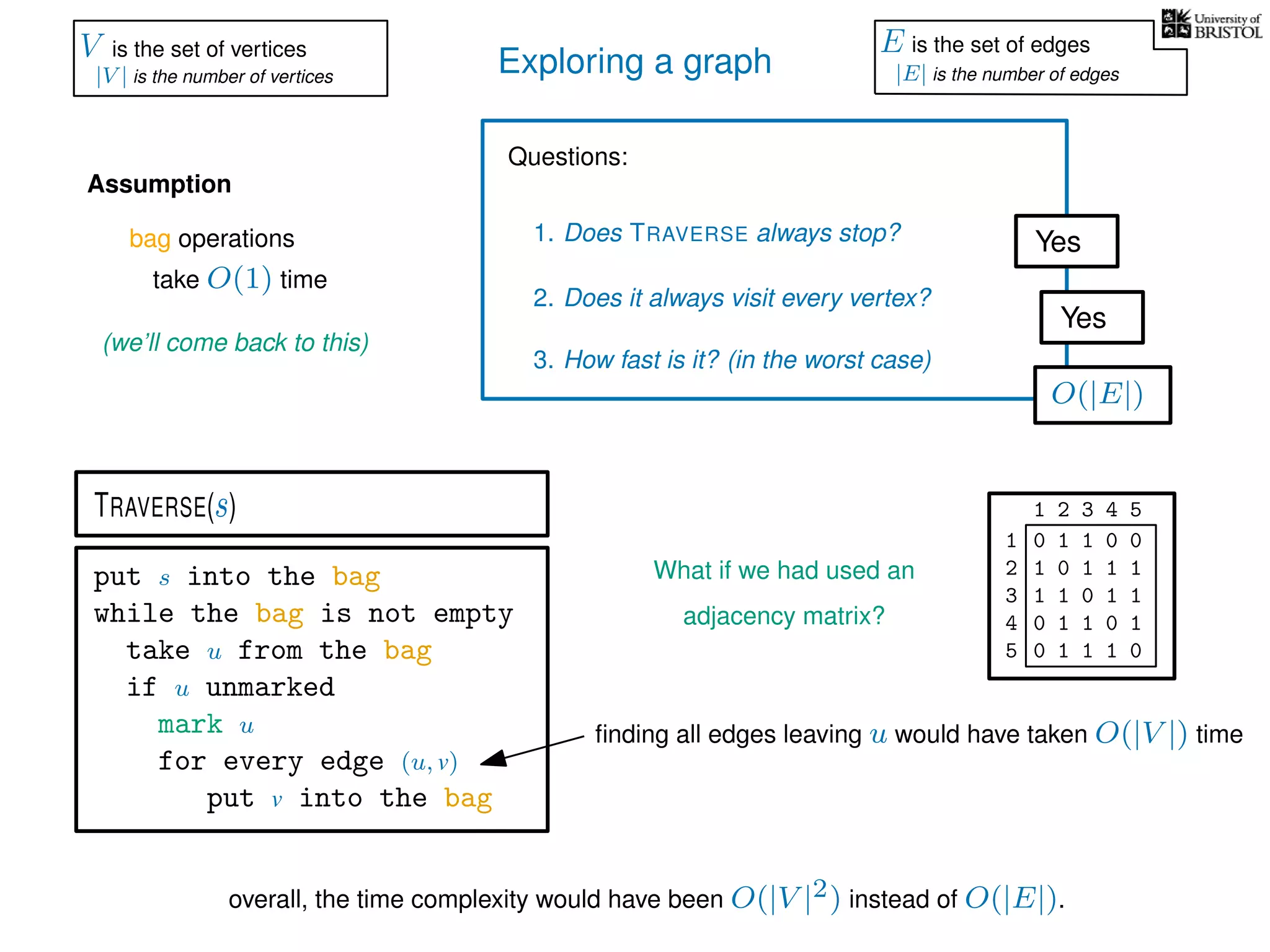
![Exploring a graph
Questions:
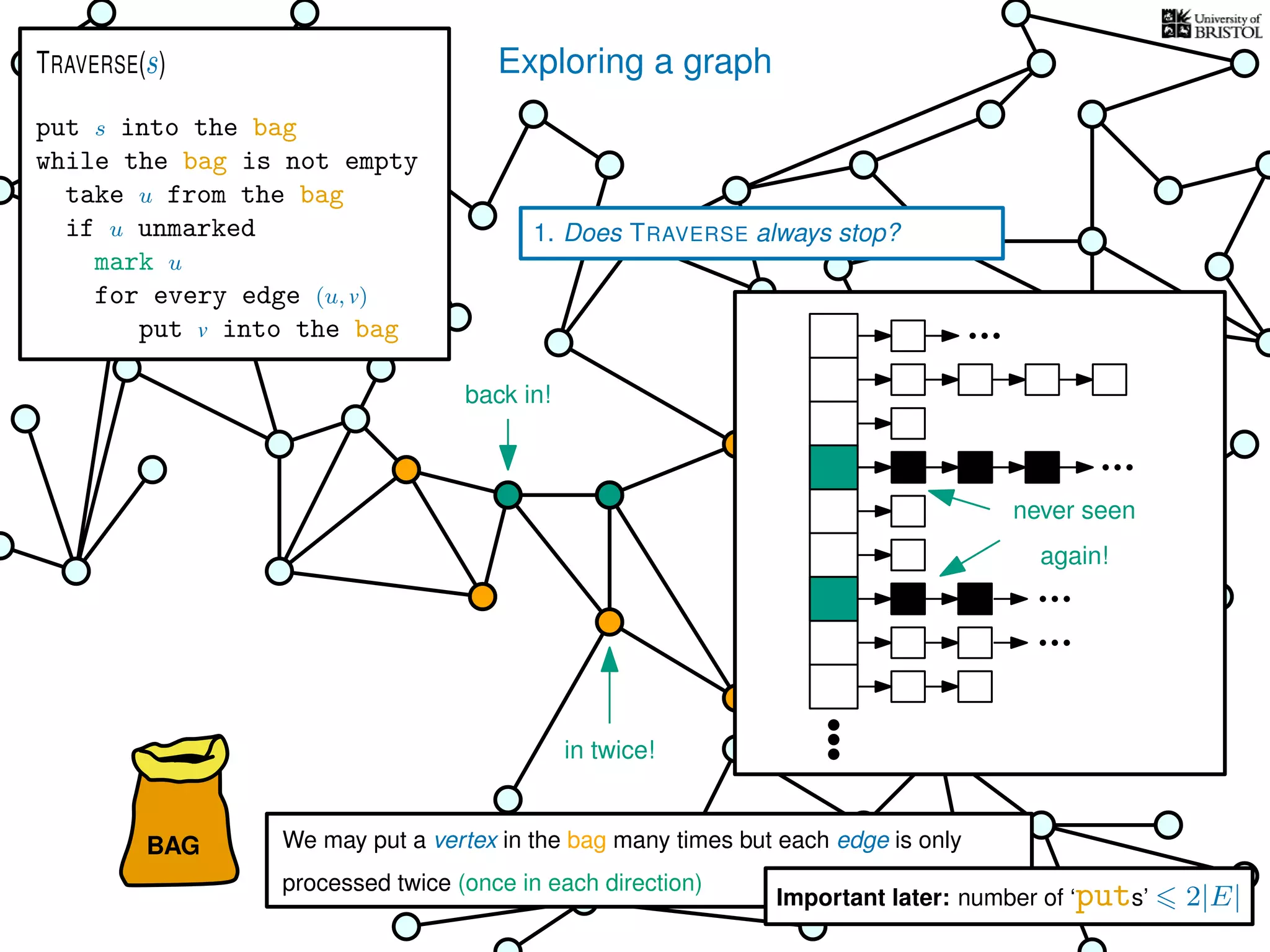
1. Does TRAVERSE always stop?
2. Does it always visit every vertex?
Yes
Yes
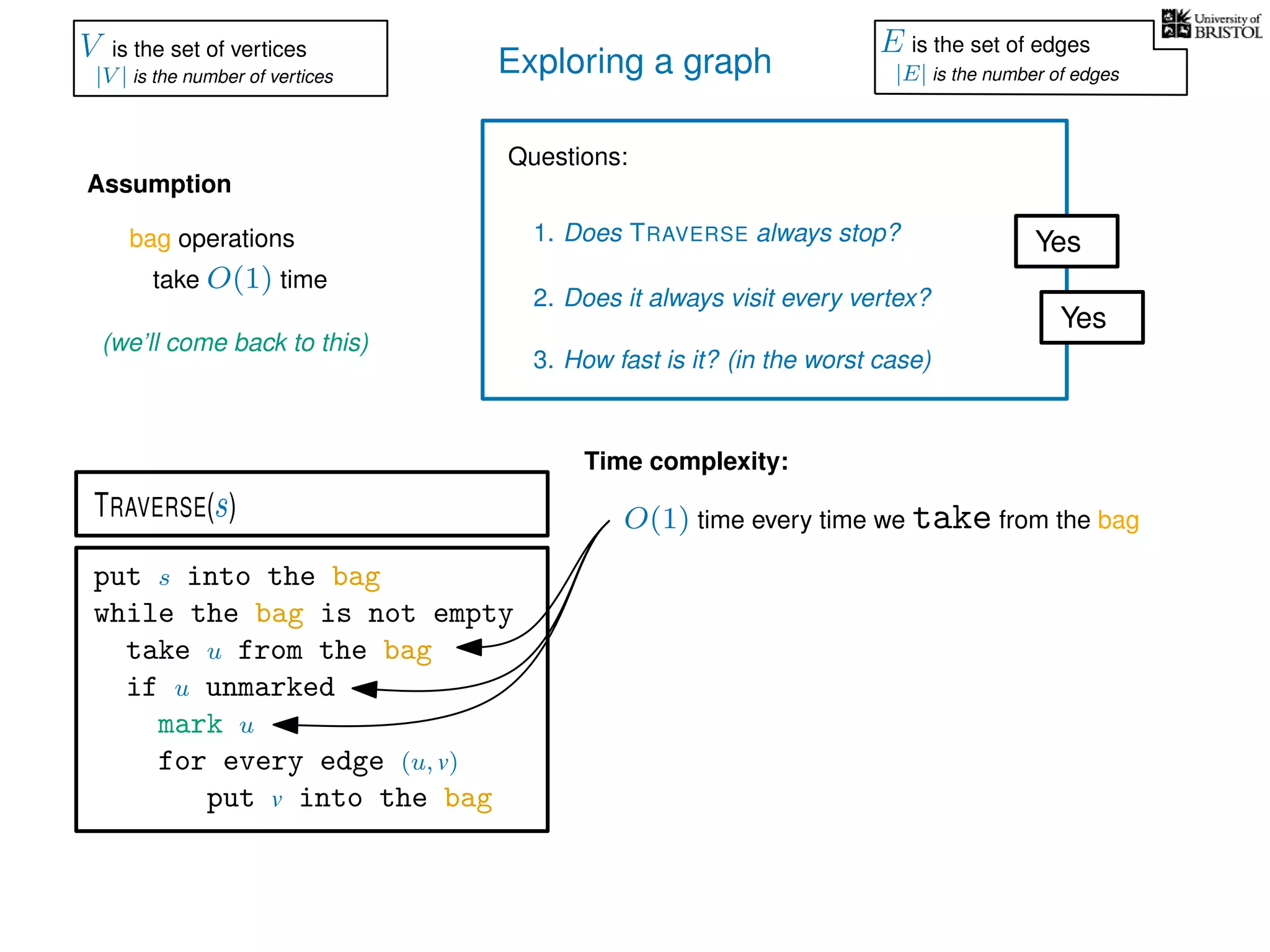
3. How fast is it? (in the worst case)
Time complexity:
Assumption
(we’ll come back to this)
(store an array where mark[u] = 1 iff u is marked)
O(1) time every time we take from the bag
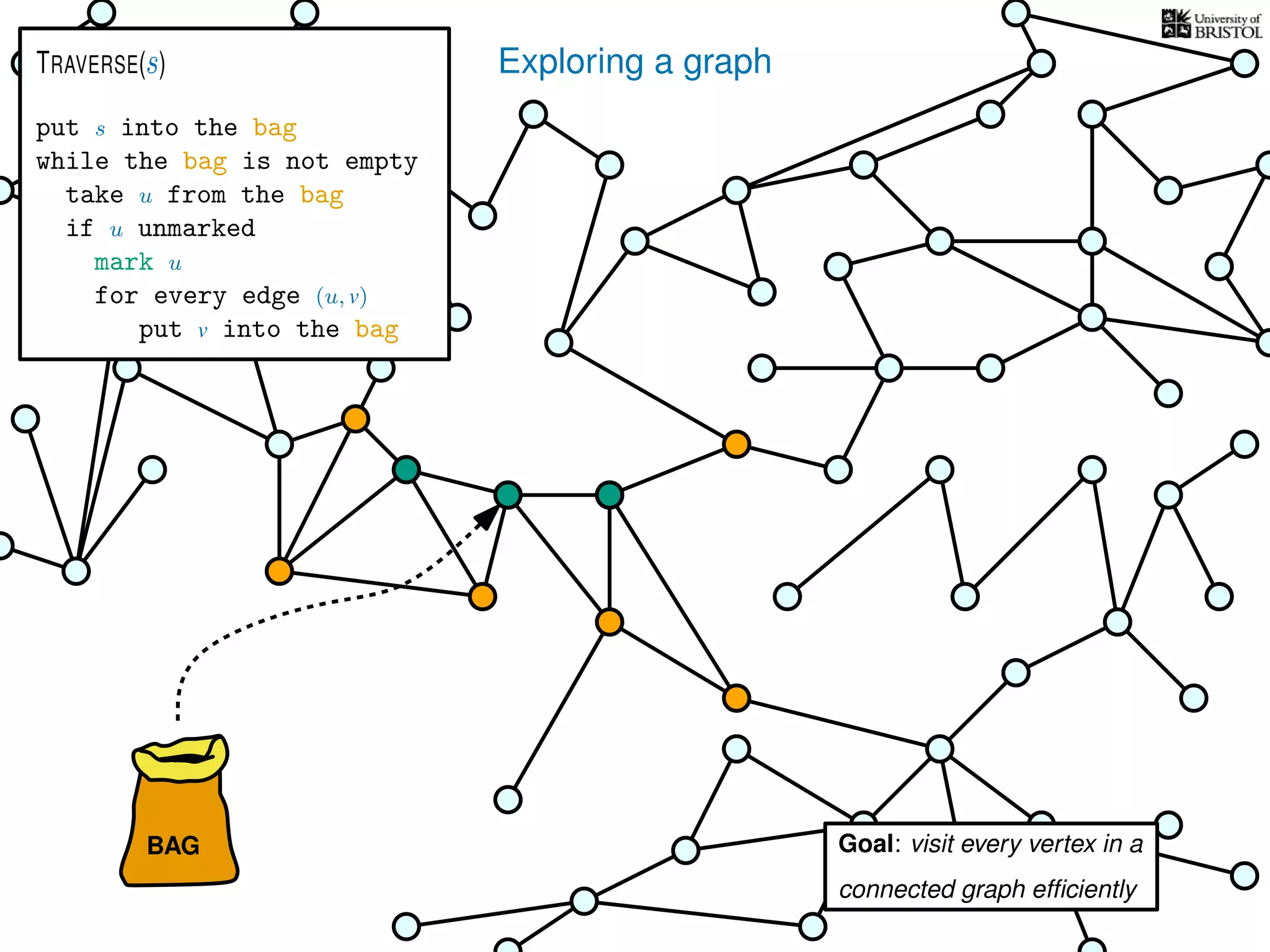
put s into the bag
while the bag is not empty
take u from the bag
if u unmarked
mark u
for every edge (u, v)
put v into the bag
TRAVERSE(s)
bag operations
take O(1) time
O(1) time every time we put into the bag
What is the total number of bag operations?
we do at most 2|E| put operations
V is the set of vertices
|V | is the number of vertices
E is the set of edges
|E| is the number of edges](https://image.slidesharecdn.com/dsa-w3l1-160916143030/75/Depth-First-Search-and-Breadth-First-Search-137-2048.jpg)
![Exploring a graph
Questions:
1. Does TRAVERSE always stop?
2. Does it always visit every vertex?
Yes
Yes
3. How fast is it? (in the worst case)
Time complexity:
Assumption
(we’ll come back to this)
(store an array where mark[u] = 1 iff u is marked)
O(1) time every time we take from the bag
put s into the bag
while the bag is not empty
take u from the bag
if u unmarked
mark u
for every edge (u, v)
put v into the bag
TRAVERSE(s)
bag operations
take O(1) time
O(1) time every time we put into the bag
What is the total number of bag operations?
we do at most 2|E| put operations
so we do at most 2|E| take operations
V is the set of vertices
|V | is the number of vertices
E is the set of edges
|E| is the number of edges](https://image.slidesharecdn.com/dsa-w3l1-160916143030/75/Depth-First-Search-and-Breadth-First-Search-138-2048.jpg)
![Exploring a graph
Questions:
1. Does TRAVERSE always stop?
2. Does it always visit every vertex?
Yes
Yes
3. How fast is it? (in the worst case)
Time complexity:
Assumption
(we’ll come back to this)
(store an array where mark[u] = 1 iff u is marked)
O(1) time every time we take from the bag
put s into the bag
while the bag is not empty
take u from the bag
if u unmarked
mark u
for every edge (u, v)
put v into the bag
TRAVERSE(s)
bag operations
take O(1) time
O(1) time every time we put into the bag
What is the total number of bag operations?
we do at most 2|E| put operations
so we do at most 2|E| take operations
The overall time complexity is O(|E|)
V is the set of vertices
|V | is the number of vertices
E is the set of edges
|E| is the number of edges](https://image.slidesharecdn.com/dsa-w3l1-160916143030/75/Depth-First-Search-and-Breadth-First-Search-139-2048.jpg)
![Exploring a graph
Questions:
1. Does TRAVERSE always stop?
2. Does it always visit every vertex?
Yes
Yes
3. How fast is it? (in the worst case)
Time complexity:
Assumption
(we’ll come back to this)
(store an array where mark[u] = 1 iff u is marked)
O(1) time every time we take from the bag
put s into the bag
while the bag is not empty
take u from the bag
if u unmarked
mark u
for every edge (u, v)
put v into the bag
TRAVERSE(s)
bag operations
take O(1) time
O(1) time every time we put into the bag
What is the total number of bag operations?
we do at most 2|E| put operations
so we do at most 2|E| take operations
The overall time complexity is O(|E|)
O(|E|)
V is the set of vertices
|V | is the number of vertices
E is the set of edges
|E| is the number of edges](https://image.slidesharecdn.com/dsa-w3l1-160916143030/75/Depth-First-Search-and-Breadth-First-Search-140-2048.jpg)








![Data Structures - Lecture 10 [Graphs]](https://cdn.slidesharecdn.com/ss_thumbnails/datastructures-lecture10graphs-150305004608-conversion-gate01-thumbnail.jpg?width=640&height=640&fit=bounds)









![Depth first search [dfs]](https://cdn.slidesharecdn.com/ss_thumbnails/depthfirstsearchdfs-190926145304-thumbnail.jpg?width=640&height=640&fit=bounds)