1. A graph is a collection of objects called vertices that are connected by links called edges. Graphs can be represented as a pair of sets (V,E) where V is the set of vertices and E is the set of edges.
2. There are several important terms used to describe graphs including adjacent nodes, degree of a node, regular graphs, paths, cycles, connected graphs, and complete graphs. Graphs can be represented using adjacency matrices or adjacency lists.
3. There are two main techniques for traversing graphs - depth-first search (DFS) and breadth-first search (BFS). DFS uses a stack and traverses graphs in a depth-wise manner while BFS uses a

![GRAPH
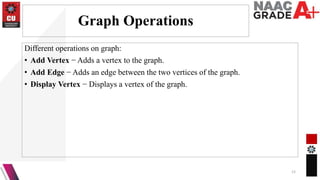
• A graph is collection of objects where a set of objects are connected through links.
The connected objects can be represented as vertices, the links which join the
vertices are known as edges.
• Graph can be represented as a pair of sets (V, E), in which V is set of graph
vertices & E is set of joining edges. Consider the following graph
2
Fig 1: Graph [1]](https://image.slidesharecdn.com/graphs-240204075132-6343dc4c/85/Graphs-pptx-2-320.jpg)
![Important Terms In Graph
• Adjacent nodes or neighbors For every edge, e = (u, v) that connects nodes u and v, the nodes u
and v are the end-points and are said to be the adjacent nodes or neighbors.
• Degree of a node Degree of a node u, deg(u), is the total number of edges containing the node u. If
deg(u) = 0, it means that u does not belong to any edge and such a node is known as an isolated
node.
• Regular graph It is a graph where each vertex has the same number of neighbors. That is, every
node has the same degree. A regular graph with vertices of degree k is called a k–regular graph or a
regular graph of degree k. Figure 2 shows regular graphs
3
Fig 2: Regular Graph [2]](https://image.slidesharecdn.com/graphs-240204075132-6343dc4c/85/Graphs-pptx-3-320.jpg)
![Important Terms In Graph
Loop An edge that has identical end-points is called a loop. That is, e = (u, u).
Multi-graph A graph with multiple edges and/or loops is called a multi-graph. Figure
3 (a) shows a multi-graph.
Size of a graph The size of a graph is the total number of edges in it.
6
Fig 3: Multi-graph, Tree, Weighted Graph [2]](https://image.slidesharecdn.com/graphs-240204075132-6343dc4c/85/Graphs-pptx-6-320.jpg)
![Directed Graph
• If a graph contains ordered pair of vertices, is said to be a Directed Graph.
• If an edge is represented using a pair of vertices (V1, V2), the edge is said to be directed from V1 to V2.
• The first element of the pair V1 is called the start vertex and the second element of the pair V2 is called
the end vertex.
• Set of Vertices V = {1, 2, 3, 4, 5, 5}
• Set of Edges W = {(1, 3), (1, 5), (2, 1), (2, 3), (2, 4), (3, 4), (4, 5)}
7
Fig 4: Directed Graph [3]](https://image.slidesharecdn.com/graphs-240204075132-6343dc4c/85/Graphs-pptx-7-320.jpg)
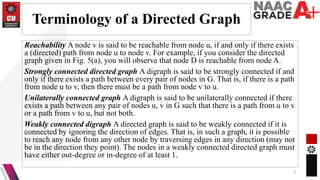
![Terminology of a Directed Graph
Parallel/Multiple edges Distinct edges which connect the same end-points are called
multiple edges. That is, e = (u, v) and e' = (u, v) are known as multiple edges of G.
In Fig. 5(a), e3 and e5 are multiple edges connecting nodes C and D.
Simple directed graph A directed graph G is said to be a simple directed graph if
and only if it has no parallel edges. However, a simple directed graph may contain
cycles with an exception that it cannot have more than one loop at a given node.
10
Fig 5: (a) Directed acyclic graph and (b) strongly connected directed acyclic graph [2]](https://image.slidesharecdn.com/graphs-240204075132-6343dc4c/85/Graphs-pptx-10-320.jpg)
![Undirected Graph
• If a graph contains unordered pair of vertices, is said to be an Undirected Graph.
• In this graph, pair of vertices represents the same edge.
• Set of Vertices V = {1, 2, 3, 4, 5}
• Set of Edges E = {(1, 2), (1, 3), (1, 5), (2, 1), (2, 3), (2, 4), (3, 4), (4, 5)}
• In an undirected graph, the nodes are connected by undirected arcs.
• It is an edge that has no arrow. Both the ends of an undirected arc are equivalent, there is
no head or tail.
11
Fig 6: Undirected Graph [3]](https://image.slidesharecdn.com/graphs-240204075132-6343dc4c/85/Graphs-pptx-11-320.jpg)
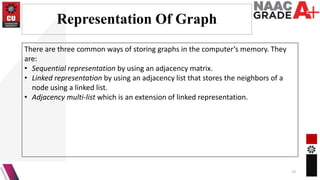
![Adjacency Matrix
14
Fig 7: adjacency matrix[4]
Let G=(V,E) be a graph with n vertices. The
adjacency matrix of G is a two-dimensional n by
n array, say adj_mat
If the edge (vi, vj) is in E(G), adj_mat[i][j]=1
If there is no such edge in E(G), adj_mat[i][j]=0
The adjacency matrix for an undirected graph is
symmetric; the adjacency matrix for a digraph
need not be symmetric .](https://image.slidesharecdn.com/graphs-240204075132-6343dc4c/85/Graphs-pptx-14-320.jpg)
![Adjacency Matrix
.
16
The above graph represents undirected graph with the adjacency matrix representation. It shows adjacency
matrix of undirected graph is symmetric. If there is an edge (2, 4), there is also an edge (4, 2).
Fig 8: adjacency matrix[5]](https://image.slidesharecdn.com/graphs-240204075132-6343dc4c/85/Graphs-pptx-16-320.jpg)
![Adjacency Matrix
.
17
Adjacency matrix of a directed graph is never symmetric adj[i][j] = 1, indicated a directed edge from vertex i to
vertex j.
Fig 9: Undirected graph and adjacency matrix[5]](https://image.slidesharecdn.com/graphs-240204075132-6343dc4c/85/Graphs-pptx-17-320.jpg)
![Adjacency Matrix
.
18
The above graph represents directed graph with the adjacency matrix representation. It shows adjacency
matrix of directed graph which is never symmetric. If there is an edge (2, 4), there is not an edge (4, 2). It
indicates direct edge from vertex i to vertex j.
Fig 10: Directed graph and adjacency matrix[5]](https://image.slidesharecdn.com/graphs-240204075132-6343dc4c/85/Graphs-pptx-18-320.jpg)
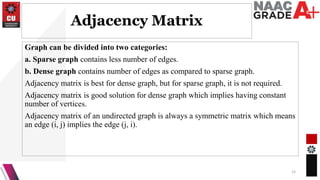
![Adjacency List
• In adjacency list, an entry array[i] represents the linked list of vertices adjacent to
the ith vertex.
• Adjacency list allows to store the graph in more compact form than adjacency
matrix.
• It allows to get the list of adjacent vertices in O(1) time.
22
Fig 11: directed graph and adjacency list [5]](https://image.slidesharecdn.com/graphs-240204075132-6343dc4c/85/Graphs-pptx-22-320.jpg)
![Graph Traversal Using DFS
26
Fig 12: DFS Traversal [6]](https://image.slidesharecdn.com/graphs-240204075132-6343dc4c/85/Graphs-pptx-26-320.jpg)
![Graph Traversal Using DFS
27
Fig 13: DFS Traversal [7]](https://image.slidesharecdn.com/graphs-240204075132-6343dc4c/85/Graphs-pptx-27-320.jpg)
![Graph Traversal Using DFS
28
Fig 14: DFS Recursive [7]](https://image.slidesharecdn.com/graphs-240204075132-6343dc4c/85/Graphs-pptx-28-320.jpg)
![Depth-First Search Algorithm
Step 1: SET STATUS = 1 (ready state) for each node in G
Step 2: Push the starting node A on the stack and set its STATUS = 2 (waiting state)
Step 3: Repeat Steps 4 and 5 until STACK is empty
Step 4: Pop the top node N. Process it and set its STATUS = 3 (processed state)
Step 5: Push on the stack all the neighbors of N that are in the ready state (whose
STATUS = 1) and set their STATUS = 2 (waiting state)
[END OF LOOP]
Step 6: EXIT
29](https://image.slidesharecdn.com/graphs-240204075132-6343dc4c/85/Graphs-pptx-29-320.jpg)
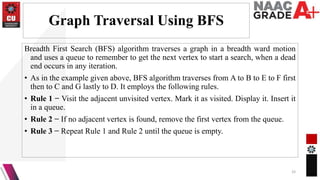
![Graph Traversal Using BFS
34
Fig 15: BFS Traversal [8]](https://image.slidesharecdn.com/graphs-240204075132-6343dc4c/85/Graphs-pptx-34-320.jpg)
![Algorithm for Breadth-First
Search
Step 1: SET STATUS = 1 (ready state) for each node in G
Step 2: Enqueue the starting node A and set its STATUS = 2 (waiting state)
Step 3: Repeat Steps 4 and 5 until QUEUE is empty
Step 4: Dequeue a node N. Process it and set its STATUS = 3 (processed state).
Step 5: Enqueue all the neighbours of N that are in the ready state (whose STATUS
= 1) and set their STATUS = 2 (waiting state)
[END OF LOOP]
Step 6: EXIT
35](https://image.slidesharecdn.com/graphs-240204075132-6343dc4c/85/Graphs-pptx-35-320.jpg)
![BFS Example
36
Fig 16: BFS Example [9]
Consider the graph G shown in the following image, calculate the minimum path p
from node A to node E. Given that each edge has a length of 1.](https://image.slidesharecdn.com/graphs-240204075132-6343dc4c/85/Graphs-pptx-36-320.jpg)

![REFERENCE IMAGES
[1]https://www.tutorialspoint.com/data_structures_algorithms/graph_data_structure.ht
m
[2] http://masterraghu.com/subjects/Datastructures/ebooks/rema%20thareja.pdf
[3] https://www.tutorialride.com/data-structures/graphs-in-data-structure.htm
[4]https://www.tutorialspoint.com/data_structures_algorithms/graph_data_structure.ht
m
[5] https://www.tutorialride.com/data-structures/graphs-in-data-structure.htm
[6]https://www.tutorialspoint.com/data_structures_algorithms/depth_first_traversal.htm
[7] https://www.tutorialride.com/data-structures/graphs-in-data-structure.htm
[8]https://www.tutorialspoint.com/data_structures_algorithms/breadth_first_traversal.htm
[9]https://www.javatpoint.com/breadth-first-search-algorithm
44](https://image.slidesharecdn.com/graphs-240204075132-6343dc4c/85/Graphs-pptx-44-320.jpg)