Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
sleepy_yoshi
PDF, PPTX
62,987 views
CVIM#11 3. 最小化のための数値計算
CVIM勉強会#11 1章バンドルアジャストメント 3. 最小化のための数値計算
Technology
◦
Read more
27
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 50
2
/ 50
3
/ 50
4
/ 50
5
/ 50
6
/ 50
7
/ 50
8
/ 50
Most read
9
/ 50
10
/ 50
11
/ 50
12
/ 50
Most read
13
/ 50
14
/ 50
15
/ 50
Most read
16
/ 50
17
/ 50
18
/ 50
19
/ 50
20
/ 50
21
/ 50
22
/ 50
23
/ 50
24
/ 50
25
/ 50
26
/ 50
27
/ 50
28
/ 50
29
/ 50
30
/ 50
31
/ 50
32
/ 50
33
/ 50
34
/ 50
35
/ 50
36
/ 50
37
/ 50
38
/ 50
39
/ 50
40
/ 50
41
/ 50
42
/ 50
43
/ 50
44
/ 50
45
/ 50
46
/ 50
47
/ 50
48
/ 50
49
/ 50
50
/ 50
More Related Content
PDF
Visual SLAM: Why Bundle Adjust?の解説(第4回3D勉強会@関東)
by
Masaya Kaneko
PDF
顕著性マップの推定手法
by
Takao Yamanaka
PDF
強化学習と逆強化学習を組み合わせた模倣学習
by
Eiji Uchibe
PPTX
[DL輪読会]Vision Transformer with Deformable Attention (Deformable Attention Tra...
by
Deep Learning JP
PDF
グラフニューラルネットワーク入門
by
ryosuke-kojima
PPTX
[DL輪読会]Swin Transformer: Hierarchical Vision Transformer using Shifted Windows
by
Deep Learning JP
PPTX
【解説】 一般逆行列
by
Kenjiro Sugimoto
PPTX
Swin Transformer (ICCV'21 Best Paper) を完璧に理解する資料
by
Yusuke Uchida
Visual SLAM: Why Bundle Adjust?の解説(第4回3D勉強会@関東)
by
Masaya Kaneko
顕著性マップの推定手法
by
Takao Yamanaka
強化学習と逆強化学習を組み合わせた模倣学習
by
Eiji Uchibe
[DL輪読会]Vision Transformer with Deformable Attention (Deformable Attention Tra...
by
Deep Learning JP
グラフニューラルネットワーク入門
by
ryosuke-kojima
[DL輪読会]Swin Transformer: Hierarchical Vision Transformer using Shifted Windows
by
Deep Learning JP
【解説】 一般逆行列
by
Kenjiro Sugimoto
Swin Transformer (ICCV'21 Best Paper) を完璧に理解する資料
by
Yusuke Uchida
What's hot
PPTX
Transformerを雰囲気で理解する
by
AtsukiYamaguchi1
PDF
最適輸送の解き方
by
joisino
PDF
【DL輪読会】Segment Anything
by
Deep Learning JP
PDF
動作認識の最前線:手法,タスク,データセット
by
Toru Tamaki
PDF
2018/12/28 LiDARで取得した道路上点群に対するsemantic segmentation
by
Takuya Minagawa
PDF
全力解説!Transformer
by
Arithmer Inc.
PDF
SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 〜 TransformerのCompute...
by
SSII
PPTX
[DL輪読会]Set Transformer: A Framework for Attention-based Permutation-Invariant...
by
Deep Learning JP
PDF
LiDAR-SLAM チュートリアル資料
by
Fujimoto Keisuke
PDF
生成モデルの Deep Learning
by
Seiya Tokui
PDF
Word Tour: One-dimensional Word Embeddings via the Traveling Salesman Problem...
by
joisino
PDF
Skip Connection まとめ(Neural Network)
by
Yamato OKAMOTO
PDF
SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜
by
SSII
PDF
[DL輪読会]Learning Transferable Visual Models From Natural Language Supervision
by
Deep Learning JP
PDF
Optimizer入門&最新動向
by
Motokawa Tetsuya
PDF
ドメイン適応の原理と応用
by
Yoshitaka Ushiku
PPTX
【DL輪読会】言語以外でのTransformerのまとめ (ViT, Perceiver, Frozen Pretrained Transformer etc)
by
Deep Learning JP
PDF
3D CNNによる人物行動認識の動向
by
Kensho Hara
PPTX
Curriculum Learning (関東CV勉強会)
by
Yoshitaka Ushiku
PDF
三次元表現まとめ(深層学習を中心に)
by
Tomohiro Motoda
Transformerを雰囲気で理解する
by
AtsukiYamaguchi1
最適輸送の解き方
by
joisino
【DL輪読会】Segment Anything
by
Deep Learning JP
動作認識の最前線:手法,タスク,データセット
by
Toru Tamaki
2018/12/28 LiDARで取得した道路上点群に対するsemantic segmentation
by
Takuya Minagawa
全力解説!Transformer
by
Arithmer Inc.
SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 〜 TransformerのCompute...
by
SSII
[DL輪読会]Set Transformer: A Framework for Attention-based Permutation-Invariant...
by
Deep Learning JP
LiDAR-SLAM チュートリアル資料
by
Fujimoto Keisuke
生成モデルの Deep Learning
by
Seiya Tokui
Word Tour: One-dimensional Word Embeddings via the Traveling Salesman Problem...
by
joisino
Skip Connection まとめ(Neural Network)
by
Yamato OKAMOTO
SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜
by
SSII
[DL輪読会]Learning Transferable Visual Models From Natural Language Supervision
by
Deep Learning JP
Optimizer入門&最新動向
by
Motokawa Tetsuya
ドメイン適応の原理と応用
by
Yoshitaka Ushiku
【DL輪読会】言語以外でのTransformerのまとめ (ViT, Perceiver, Frozen Pretrained Transformer etc)
by
Deep Learning JP
3D CNNによる人物行動認識の動向
by
Kensho Hara
Curriculum Learning (関東CV勉強会)
by
Yoshitaka Ushiku
三次元表現まとめ(深層学習を中心に)
by
Tomohiro Motoda
Viewers also liked
PDF
2次元/3次元幾何学変換の統一的な最適計算論文
by
doboncho
PDF
実践コンピュータビジョン 3章 画像間の写像
by
yaju88
PPTX
Dimension Reduction And Visualization Of Large High Dimensional Data Via Inte...
by
wl820609
PDF
Methods of Manifold Learning for Dimension Reduction of Large Data Sets
by
Ryan B Harvey, CSDP, CSM
PDF
Manifold learning with application to object recognition
by
zukun
PPT
Topic Models
by
Claudia Wagner
PDF
The Gaussian Process Latent Variable Model (GPLVM)
by
James McMurray
PDF
関東CV勉強会 Kernel PCA (2011.2.19)
by
Akisato Kimura
PDF
Numpy scipyで独立成分分析
by
Shintaro Fukushima
PPTX
Self-organizing map
by
Tarat Diloksawatdikul
PDF
[Kim+ ICML2012] Dirichlet Process with Mixed Random Measures : A Nonparametri...
by
Shuyo Nakatani
PDF
WSDM2016読み会 Collaborative Denoising Auto-Encoders for Top-N Recommender Systems
by
Kotaro Tanahashi
PDF
Visualizing Data Using t-SNE
by
Tomoki Hayashi
PDF
Hyperoptとその周辺について
by
Keisuke Hosaka
PDF
AutoEncoderで特徴抽出
by
Kai Sasaki
PDF
LDA入門
by
正志 坪坂
2次元/3次元幾何学変換の統一的な最適計算論文
by
doboncho
実践コンピュータビジョン 3章 画像間の写像
by
yaju88
Dimension Reduction And Visualization Of Large High Dimensional Data Via Inte...
by
wl820609
Methods of Manifold Learning for Dimension Reduction of Large Data Sets
by
Ryan B Harvey, CSDP, CSM
Manifold learning with application to object recognition
by
zukun
Topic Models
by
Claudia Wagner
The Gaussian Process Latent Variable Model (GPLVM)
by
James McMurray
関東CV勉強会 Kernel PCA (2011.2.19)
by
Akisato Kimura
Numpy scipyで独立成分分析
by
Shintaro Fukushima
Self-organizing map
by
Tarat Diloksawatdikul
[Kim+ ICML2012] Dirichlet Process with Mixed Random Measures : A Nonparametri...
by
Shuyo Nakatani
WSDM2016読み会 Collaborative Denoising Auto-Encoders for Top-N Recommender Systems
by
Kotaro Tanahashi
Visualizing Data Using t-SNE
by
Tomoki Hayashi
Hyperoptとその周辺について
by
Keisuke Hosaka
AutoEncoderで特徴抽出
by
Kai Sasaki
LDA入門
by
正志 坪坂
Similar to CVIM#11 3. 最小化のための数値計算
PDF
PRML 5.2.1-5.3.3 ニューラルネットワークの学習 (誤差逆伝播) / Training Neural Networks (Backpropa...
by
Akihiro Nitta
PDF
連続最適化勉強会
by
shima o
PDF
東京都市大学 データ解析入門 6 回帰分析とモデル選択 1
by
hirokazutanaka
PDF
PRML復々習レーン#9 前回までのあらすじ
by
sleepy_yoshi
PDF
Incremental
by
Naotaka Yamada
PDF
Jokyonokai
by
nwpmq516
PDF
Jokyonokai
by
nwpmq516
PDF
SMO徹底入門 - SVMをちゃんと実装する
by
sleepy_yoshi
PDF
PRML Chapter 5 (5.0-5.4)
by
Shogo Nakamura
PDF
パターン認識と機械学習6章(カーネル法)
by
Yukara Ikemiya
PDF
Nonlinear programming輪講スライド with 最適化法
by
Yo Ehara
PDF
第9回 配信講義 計算科学技術特論A(2021)
by
RCCSRENKEI
PPTX
PRML Chapter 5
by
Masahito Ohue
PDF
El text.tokuron a(2019).yamamoto190627
by
RCCSRENKEI
PDF
第15回 配信講義 計算科学技術特論B(2022)
by
RCCSRENKEI
PDF
大規模凸最適化問題に対する勾配法
by
京都大学大学院情報学研究科数理工学専攻
PDF
Sized Linear Algebra Package のチュートリアル
by
Akinori Abe
PDF
東京都市大学 データ解析入門 4 スパース性と圧縮センシング1
by
hirokazutanaka
PDF
El text.tokuron a(2019).yamamoto190620
by
RCCSRENKEI
PDF
第8回 配信講義 計算科学技術特論A(2021)
by
RCCSRENKEI
PRML 5.2.1-5.3.3 ニューラルネットワークの学習 (誤差逆伝播) / Training Neural Networks (Backpropa...
by
Akihiro Nitta
連続最適化勉強会
by
shima o
東京都市大学 データ解析入門 6 回帰分析とモデル選択 1
by
hirokazutanaka
PRML復々習レーン#9 前回までのあらすじ
by
sleepy_yoshi
Incremental
by
Naotaka Yamada
Jokyonokai
by
nwpmq516
Jokyonokai
by
nwpmq516
SMO徹底入門 - SVMをちゃんと実装する
by
sleepy_yoshi
PRML Chapter 5 (5.0-5.4)
by
Shogo Nakamura
パターン認識と機械学習6章(カーネル法)
by
Yukara Ikemiya
Nonlinear programming輪講スライド with 最適化法
by
Yo Ehara
第9回 配信講義 計算科学技術特論A(2021)
by
RCCSRENKEI
PRML Chapter 5
by
Masahito Ohue
El text.tokuron a(2019).yamamoto190627
by
RCCSRENKEI
第15回 配信講義 計算科学技術特論B(2022)
by
RCCSRENKEI
大規模凸最適化問題に対する勾配法
by
京都大学大学院情報学研究科数理工学専攻
Sized Linear Algebra Package のチュートリアル
by
Akinori Abe
東京都市大学 データ解析入門 4 スパース性と圧縮センシング1
by
hirokazutanaka
El text.tokuron a(2019).yamamoto190620
by
RCCSRENKEI
第8回 配信講義 計算科学技術特論A(2021)
by
RCCSRENKEI
More from sleepy_yoshi
PDF
KDD2014勉強会: Large-Scale High-Precision Topic Modeling on Twitter
by
sleepy_yoshi
PDF
KDD2013読み会: Direct Optimization of Ranking Measures
by
sleepy_yoshi
PDF
PRML復々習レーン#15 前回までのあらすじ
by
sleepy_yoshi
PDF
PRML復々習レーン#14 前回までのあらすじ
by
sleepy_yoshi
PDF
PRML復々習レーン#13 前回までのあらすじ
by
sleepy_yoshi
PDF
PRML復々習レーン#12 前回までのあらすじ
by
sleepy_yoshi
PDF
ICML2013読み会: Distributed training of Large-scale Logistic models
by
sleepy_yoshi
PDF
SEXI2013読み会: Adult Query Classification for Web Search and Recommendation
by
sleepy_yoshi
PDF
計算論的学習理論入門 -PAC学習とかVC次元とか-
by
sleepy_yoshi
PDF
PRML復々習レーン#11 前回までのあらすじ
by
sleepy_yoshi
PDF
PRML復々習レーン#10 前回までのあらすじ
by
sleepy_yoshi
PDF
PRML復々習レーン#10 7.1.3-7.1.5
by
sleepy_yoshi
PDF
PRML復々習レーン#9 6.3-6.3.1
by
sleepy_yoshi
PDF
PRML復々習レーン#7 前回までのあらすじ
by
sleepy_yoshi
PDF
SIGIR2012勉強会 23 Learning to Rank
by
sleepy_yoshi
PDF
DSIRNLP#3 LT: 辞書挟み込み型転置インデクスFIg4.5
by
sleepy_yoshi
PDF
ICML2012読み会 Scaling Up Coordinate Descent Algorithms for Large L1 regularizat...
by
sleepy_yoshi
PDF
PRML復々習レーン#3 3.1.3-3.1.5
by
sleepy_yoshi
PDF
PRML復々習レーン#3 前回までのあらすじ
by
sleepy_yoshi
PDF
SVM実践ガイド (A Practical Guide to Support Vector Classification)
by
sleepy_yoshi
KDD2014勉強会: Large-Scale High-Precision Topic Modeling on Twitter
by
sleepy_yoshi
KDD2013読み会: Direct Optimization of Ranking Measures
by
sleepy_yoshi
PRML復々習レーン#15 前回までのあらすじ
by
sleepy_yoshi
PRML復々習レーン#14 前回までのあらすじ
by
sleepy_yoshi
PRML復々習レーン#13 前回までのあらすじ
by
sleepy_yoshi
PRML復々習レーン#12 前回までのあらすじ
by
sleepy_yoshi
ICML2013読み会: Distributed training of Large-scale Logistic models
by
sleepy_yoshi
SEXI2013読み会: Adult Query Classification for Web Search and Recommendation
by
sleepy_yoshi
計算論的学習理論入門 -PAC学習とかVC次元とか-
by
sleepy_yoshi
PRML復々習レーン#11 前回までのあらすじ
by
sleepy_yoshi
PRML復々習レーン#10 前回までのあらすじ
by
sleepy_yoshi
PRML復々習レーン#10 7.1.3-7.1.5
by
sleepy_yoshi
PRML復々習レーン#9 6.3-6.3.1
by
sleepy_yoshi
PRML復々習レーン#7 前回までのあらすじ
by
sleepy_yoshi
SIGIR2012勉強会 23 Learning to Rank
by
sleepy_yoshi
DSIRNLP#3 LT: 辞書挟み込み型転置インデクスFIg4.5
by
sleepy_yoshi
ICML2012読み会 Scaling Up Coordinate Descent Algorithms for Large L1 regularizat...
by
sleepy_yoshi
PRML復々習レーン#3 3.1.3-3.1.5
by
sleepy_yoshi
PRML復々習レーン#3 前回までのあらすじ
by
sleepy_yoshi
SVM実践ガイド (A Practical Guide to Support Vector Classification)
by
sleepy_yoshi
CVIM#11 3. 最小化のための数値計算
1.
第11回CV勉強会 1章 バンドルアジャストメント 3. 最小化のための数値計算 (勉強会後修正版) 2011-04-16 Yoshihiko
Suhara @sleepy_yoshi
2.
目次 • 3. 最小化のための数値計算 –
3.1 最小二乗のためのニュートン法 – 3.2 ニュートン法以外の方法 – 3.3 実装方法 – 3.4 数値計算ライブラリの利用 2
3.
3. 最小化のための数値計算 3
4.
誤差の数値最小化 • 誤差関数の最小化 (最適化) –
観測データを用いて表現される誤差関数を最小化するパ ラメータを計算する • 今回の範囲では 𝐸 𝒙 = 1 2 𝑒𝑘 2 2𝑛𝑚 𝑘 – 誤差 • 二乗誤差 – パラメータ • カメラのパラメータ • 特徴点 4
5.
3.1. 最小二乗のためのニュートン法 5
6.
最小二乗法の計算 • 線形最小二乗法 – 閉じた解で求まる
(正規方程式) • 非線形最小二乗法 – 反復計算が必要 – 𝒙(𝑡+1) = 𝒙(𝑡) + 𝛿𝒙 6
7.
3.1.1 ガウス・ニュートン法 7
8.
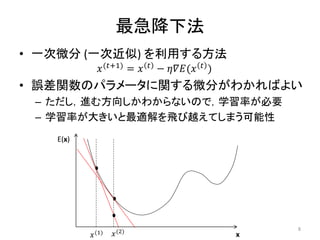
最急降下法 • 一次微分 (一次近似)
を利用する方法 𝑥(𝑡+1) = 𝑥 𝑡 − 𝜂𝛻𝐸(𝑥 𝑡 ) • 誤差関数のパラメータに関する微分がわかればよい – ただし,進む方向しかわからないので,学習率が必要 – 学習率が大きいと最適解を飛び越えてしまう可能性 E(x) x 𝑥(1) 𝑥(2) 8
9.
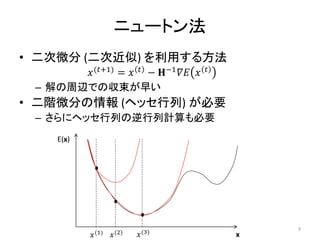
ニュートン法 • 二次微分 (二次近似)
を利用する方法 𝑥(𝑡+1) = 𝑥 𝑡 − 𝐇−1 𝛻𝐸 𝑥 𝑡 – 解の周辺での収束が早い • 二階微分の情報 (ヘッセ行列) が必要 – さらにヘッセ行列の逆行列計算も必要 E(x) x 𝑥(1) 𝑥(2) 𝑥(3) 9
10.
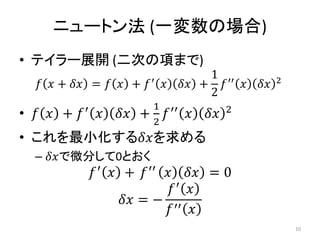
ニュートン法 (一変数の場合) • テイラー展開
(二次の項まで) 𝑓 𝑥 + 𝛿𝑥 = 𝑓 𝑥 + 𝑓′ 𝑥 𝛿𝑥 + 1 2 𝑓′′ 𝑥 𝛿𝑥 2 • 𝑓 𝑥 + 𝑓′ 𝑥 𝛿𝑥 + 1 2 𝑓′′ 𝑥 𝛿𝑥 2 • これを最小化する𝛿𝑥を求める – 𝛿𝑥で微分して0とおく 𝑓′ 𝑥 + 𝑓′′ 𝑥 𝛿𝑥 = 0 𝛿𝑥 = − 𝑓′ 𝑥 𝑓′′ 𝑥 10
11.
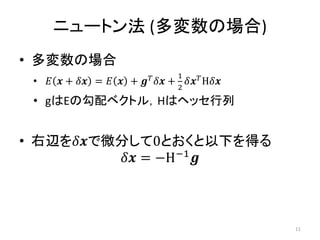
ニュートン法 (多変数の場合) • 多変数の場合 •
𝐸 𝒙 + 𝛿𝒙 = 𝐸 𝒙 + 𝒈𝑇 𝛿𝒙 + 1 2 𝛿𝒙𝑇 H𝛿𝒙 • gはEの勾配ベクトル,Hはヘッセ行列 • 右辺を𝛿𝒙で微分して0とおくと以下を得る 𝛿𝒙 = −H−1 𝒈 11
12.
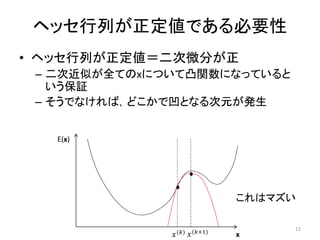
ヘッセ行列が正定値である必要性 • ヘッセ行列が正定値=二次微分が正 – 二次近似が全てのxについて凸関数になっていると いう保証 –
そうでなければ,どこかで凹となる次元が発生 E(x) x 𝑥(𝑘) 𝑥(𝑘+1) これはマズい 12
13.
ガウス・ニュートン法 ≠ ニュートン法 •
ガウス・ニュートン法 ∈ ニュートン法 – ニュートン法の実現方法の一種 • ガウス・ニュートン法を利用する目的 – ヘッセ行列を計算するのは大変 – 逆行列を計算してはいけない (数値計算の常識) – ヤコビ行列の積によって表現 13
14.
ガウス・ニュートン法とは • 𝐻 ≈
𝐽𝑇 𝐽という近似を用いたニュートン法 – 𝐽はヤコビ行列 • 𝐻 ≈ 𝐽𝑇 𝐽の精度が高くなるのは最小解付近や eの二階微分が小さい場合など (後で証明) 14
15.
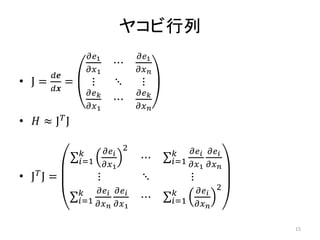
ヤコビ行列 • J = 𝑑𝒆 𝑑𝒙 = 𝜕𝑒1 𝜕𝑥1 ⋯ 𝜕𝑒1 𝜕𝑥𝑛 ⋮
⋱ ⋮ 𝜕𝑒𝑘 𝜕𝑥1 ⋯ 𝜕𝑒𝑘 𝜕𝑥𝑛 • 𝐻 ≈ J𝑇J • J𝑇 J = 𝜕𝑒𝑖 𝜕𝑥1 2 𝑘 𝑖=1 ⋯ 𝜕𝑒𝑖 𝜕𝑥1 𝜕𝑒𝑖 𝜕𝑥𝑛 𝑘 𝑖=1 ⋮ ⋱ ⋮ 𝜕𝑒𝑖 𝜕𝑥𝑛 𝜕𝑒𝑖 𝜕𝑥1 𝑘 𝑖=1 ⋯ 𝜕𝑒𝑖 𝜕𝑥𝑛 2 𝑘 𝑖=1 15
16.
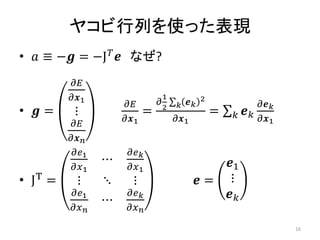
ヤコビ行列を使った表現 • 𝑎 ≡
−𝒈 = −J𝑇 𝒆 なぜ? • 𝒈 = 𝜕𝐸 𝜕𝒙1 ⋮ 𝜕𝐸 𝜕𝒙𝑛 𝜕𝐸 𝜕𝒙1 = 𝜕 1 2 𝒆𝑘 2 𝑘 𝜕𝒙1 = 𝒆𝑘 𝜕𝒆𝑘 𝜕𝒙1 𝑘 • JT = 𝜕𝑒1 𝜕𝑥1 ⋯ 𝜕𝑒𝑘 𝜕𝑥1 ⋮ ⋱ ⋮ 𝜕𝑒1 𝜕𝑥𝑛 ⋯ 𝜕𝑒𝑘 𝜕𝑥𝑛 𝒆 = 𝒆1 ⋮ 𝒆𝑘 16
17.
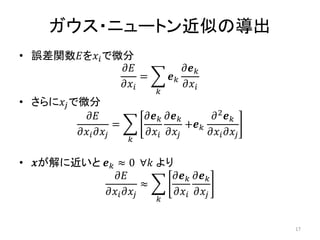
ガウス・ニュートン近似の導出 • 誤差関数𝐸を𝑥𝑖で微分 𝜕𝐸 𝜕𝑥𝑖 = 𝒆𝑘 𝜕𝒆𝑘 𝜕𝑥𝑖 𝑘 •
さらに𝑥𝑗で微分 𝜕𝐸 𝜕𝑥𝑖𝜕𝑥𝑗 = 𝜕𝒆𝑘 𝜕𝑥𝑖 𝜕𝒆𝑘 𝜕𝑥𝑗 +𝒆𝑘 𝜕2 𝒆𝑘 𝜕𝑥𝑖𝜕𝑥𝑗 𝑘 • 𝒙が解に近いと 𝒆𝑘 ≈ 0 ∀𝑘 より 𝜕𝐸 𝜕𝑥𝑖𝜕𝑥𝑗 ≈ 𝜕𝒆𝑘 𝜕𝑥𝑖 𝜕𝒆𝑘 𝜕𝑥𝑗 𝑘 17
18.
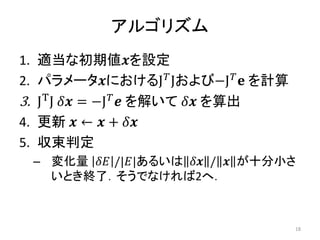
アルゴリズム 1. 適当な初期値𝒙を設定 2. パラメータ𝒙におけるJ𝑇 Jおよび−J𝑇 𝐞
を計算 3. JT J 𝛿𝒙 = −J𝑇 𝒆 を解いて 𝛿𝒙 を算出 4. 更新 𝒙 ← 𝒙 + 𝛿𝒙 5. 収束判定 – 変化量 𝛿𝐸 /|𝐸|あるいは 𝛿𝒙 / 𝒙 が十分小さ いとき終了.そうでなければ2へ. 18
19.
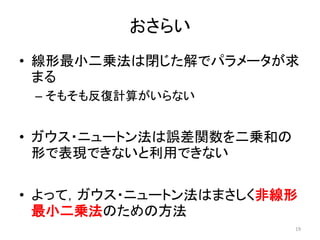
おさらい • 線形最小二乗法は閉じた解でパラメータが求 まる – そもそも反復計算がいらない •
ガウス・ニュートン法は誤差関数を二乗和の 形で表現できないと利用できない • よって,ガウス・ニュートン法はまさしく非線形 最小二乗法のための方法 19
20.
3.1.2. レベンバーグ・マーカート法 20
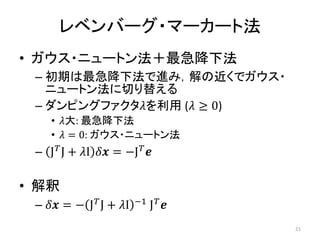
21.
レベンバーグ・マーカート法 • ガウス・ニュートン法+最急降下法 – 初期は最急降下法で進み,解の近くでガウス・ ニュートン法に切り替える –
ダンピングファクタ𝜆を利用 (𝜆 ≥ 0) • 𝜆大: 最急降下法 • 𝜆 = 0: ガウス・ニュートン法 – J𝑇J + 𝜆I 𝛿𝒙 = −J𝑇𝒆 • 解釈 – 𝛿𝒙 = − J𝑇J + 𝜆I −1 J𝑇𝒆 21
22.
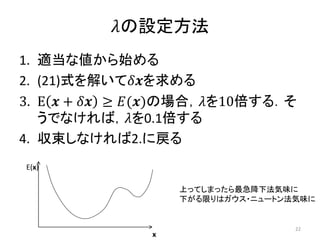
𝜆の設定方法 1. 適当な値から始める 2. (21)式を解いて𝛿𝒙を求める 3.
E 𝒙 + 𝛿𝒙 ≥ 𝐸(𝒙)の場合,𝜆を10倍する.そ うでなければ,𝜆を0.1倍する 4. 収束しなければ2.に戻る E(x) x 上ってしまったら最急降下法気味に 下がる限りはガウス・ニュートン法気味に 22
23.
3.2. ニュートン法以外の方法 23
24.
ニュートン法以外の方法 • ニュートン法の派生アルゴリズムは,標準的 に使用すべし – 準ニュートン法 •
ヘッセ行列の分解コストが大きい場合にのみ 共役勾配法の使用を検討すればよい • ニュートン法の計算を削減することは可能 – 後述 24
25.
補足 • NLPや機械学習応用分野においては準 ニュートン法であるBFGS (L-BFGS)
法がよく使 われる – 基本的に誤差関数は凸関数であることが多い – 他には共役勾配法も有効な場合もある 25
26.
3.3. 実装方法 26
27.
3.3.1 更新量の計算 27
28.
線型方程式の計算 • ニュートン法における反復では,以下の線型 方程式を効率よく計算することがカギとなる A𝛿𝒙 =
𝒙 • 逆行列を使えば以下の式で求まるが,計算 量,精度で問題あり 𝛿𝒙 = A−1 𝒙 – 数値計算の常識 28
29.
線型方程式の解法 • 一般の行列Aに対する選択肢 – ガウスの消去法 –
LU分解 – コレスキー分解 • 行列Aが対称かつ正定値の場合 29
30.
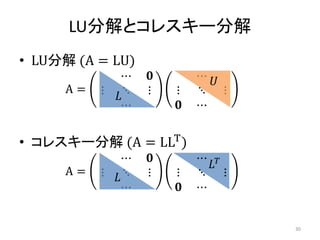
LU分解とコレスキー分解 • LU分解 (A
= LU) A = ⋯ 𝟎 ⋮ ⋱ ⋮ ⋯ ⋯ ⋮ ⋱ ⋮ 𝟎 ⋯ • コレスキー分解 (A = LLT ) A = ⋯ 𝟎 ⋮ ⋱ ⋮ ⋯ ⋯ ⋮ ⋱ ⋮ 𝟎 ⋯ 𝐿 𝑈 𝐿𝑇 𝐿 30
31.
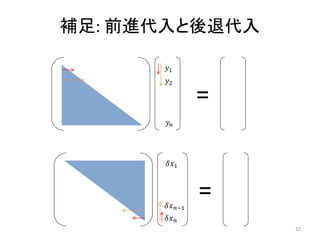
コレスキー分解を用いた解法 • 準備 – 𝑦
≡ L𝑇𝛿𝒙 とおく – A𝛿𝒙 = LL𝑇 𝛿𝒙 = L𝒚 = 𝒂 • 手順 1. Aをコレスキー分解し,Lを得る 2. L𝒚 = 𝒂 を𝒚について解く • Lが三角行列なので,Lの行を上から順番に処理すれ ば計算できる 3. LT δ𝒙 = 𝒚をδ𝒙について解く • 上記の逆 31
32.
補足: 前進代入と後退代入 = 𝑦1 𝑦2 𝑦𝑛 = 𝛿𝑥1 𝛿𝑥𝑛−1 𝛿𝑥𝑛 32
33.
コレスキー分解の処理 • 省略 – 行列の数値計算の文献を参照 •
行列の行数分だけ平方根の計算が必要 – 修正コレスキー分解 33
34.
その他の方法 • ガウスの消去法 – 計算量が若干大きい •
等価な線型最小二乗法を解く J𝛿𝒙 + 𝒆 2 → min. – 導出 • JTJ𝛿𝒙 = −JT𝒆 • J𝛿𝒙 + 𝒆 = 0 • 閉じた解で求めるために二乗 – その際のレベンバーグ・マーカート法は(23)となる • 優決定線型方程式の計算 34
35.
補足: 優決定,劣決定 • 優決定 –
変数の数<方程式の数 – 解が存在しない可能性 • 劣決定 – 変数の数>方程式の数 – 解は複数存在 35
36.
3.3.2 疎行列の扱い 36
37.
疎行列 • バンドル調整が対象とする多くの問題ではヤ コビ行列やヘッセ行列は疎行列になる – 𝑒𝑖が𝑥𝑗に依存していなければ𝜕𝑒𝑖/𝜕𝑥𝑗は常に0 •
SFMの例 – はある画像上の像の誤差 – この画像に関連しないカメラの姿勢に依存しない – 図1.3 37
38.
疎行列の活用方法 • (1) 行列の実装方法 –
非ゼロ成分だけを保存しておく – 例) Boost, Sparse BLAS – 図1.3(c) # y軸は対数スケール • (2) 得られる行列を疎行列にする – 元の行列が疎でも,計算途中で非ゼロ成分が発 生することがある (fill-in) – Aを直接コレスキー分解するよりも,PAPT を分解 する方が疎となるような置換Pを利用 • ただ,最適な置換Pを計算するのはNP 38
39.
3.3.4 パラメータの分割 39
40.
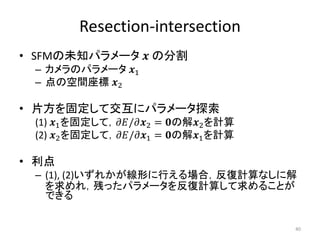
Resection-intersection • SFMの未知パラメータ 𝒙
の分割 – カメラのパラメータ 𝒙1 – 点の空間座標 𝒙2 • 片方を固定して交互にパラメータ探索 (1) 𝒙1を固定して,𝜕𝐸/𝜕𝒙2 = 𝟎の解𝒙2を計算 (2) 𝒙2を固定して,𝜕𝐸/𝜕𝒙1 = 𝟎の解𝒙1を計算 • 利点 – (1), (2)いずれかが線形に行える場合,反復計算なしに解 を求めれ,残ったパラメータを反復計算して求めることが できる 40
41.
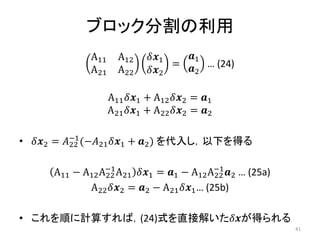
ブロック分割の利用 A11 A12 A21 A22 𝛿𝒙1 𝛿𝒙2 = 𝒂1 𝒂2 …
(24) A11𝛿𝒙1 + A12𝛿𝒙2 = 𝒂1 A21𝛿𝒙1 + A22𝛿𝒙2 = 𝒂2 • 𝛿𝒙2 = 𝐴22 −1 (−𝐴21𝛿𝒙1 + 𝒂2) を代入し,以下を得る A11 − A12A22 −1 A21 𝛿𝒙1 = 𝒂1 − A12A22 −1 𝒂2 … (25a) A22𝛿𝒙2 = 𝒂2 − A21𝛿𝒙1… (25b) • これを順に計算すれば,(24)式を直接解いた𝛿𝒙が得られる 41
42.
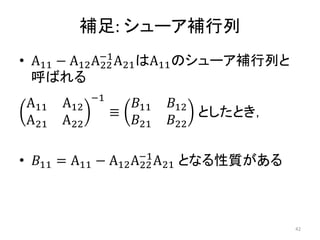
補足: シューア補行列 • A11
− A12A22 −1 A21はA11のシューア補行列と 呼ばれる A11 A12 A21 A22 −1 ≡ 𝐵11 𝐵12 𝐵21 𝐵22 としたとき, • 𝐵11 = A11 − A12A22 −1 A21 となる性質がある 42
43.
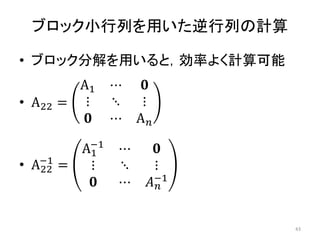
ブロック小行列を用いた逆行列の計算 • ブロック分解を用いると,効率よく計算可能 • A22
= A1 ⋯ 𝟎 ⋮ ⋱ ⋮ 𝟎 ⋯ A𝑛 • A22 −1 = A1 −1 ⋯ 𝟎 ⋮ ⋱ ⋮ 𝟎 ⋯ 𝐴𝑛 −1 43
44.
3.4. 数値計算ライブラリの利用 44
45.
数値計算ライブラリ • 最適化ライブラリ – MATLAB
(Optimization Toolbox) • lsqnonlin関数 – Trust-region法,レベンバーグ・マーカート法,ガウス・ニュートン法 – R • optim関数 – Nelder-Mead法,BFGS法, L-BFGS-B法, CG法,SANN法 • 線型代数演算ライブラリ – LAPACK • 数値計算ライブラリ – BLAS – BLAS亜種 45
46.
まとめ 46
47.
まとめ • 非線形最小二乗法の最適化手法の紹介 – ガウス・ニュートン法 –
レベンバーグ・マーカート法 • 実装方法の解説 – コレスキー分解を用いた線型方程式の計算 – 疎行列の活用方法 – パラメータ分割 • 数値計算ライブラリの紹介 47
48.
感想 • フリーで利用可能な最適化ライブラリはかな り充実している – けど,何をどう選択すればよいのかわからない
• 解きたい問題をどう定式化するかによって利 用可能な/得意なツールは異なってくる – その勘所をつけたいなぁ • 数値計算の常識を身につけたい 48
49.
参考文献 • 金谷健一.これなら分かる最適化数学.共立 出版 (2005). –
ガウス・ニュートン近似やレベンバーグ・マーカー ト法の導出もあり • 伊理正夫・藤野和建.数値計算の常識.共立 出版 (1985). – 「逆行列よさようなら」 – 数値計算のノウハウが詰まっている 49
50.
Thank you! 50
Download



![[DL輪読会]Vision Transformer with Deformable Attention (Deformable Attention Tra...](https://cdn.slidesharecdn.com/ss_thumbnails/dl0114-220114032933-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Swin Transformer: Hierarchical Vision Transformer using Shifted Windows](https://cdn.slidesharecdn.com/ss_thumbnails/swintransformer-210514020542-thumbnail.jpg?width=640&height=640&fit=bounds)








![SSII2021 [SS1] Transformer x Computer Visionの 実活用可能性と展望 〜 TransformerのCompute...](https://cdn.slidesharecdn.com/ss_thumbnails/ss1-01-210607043349-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Set Transformer: A Framework for Attention-based Permutation-Invariant...](https://cdn.slidesharecdn.com/ss_thumbnails/20200221settransformer-200221020423-thumbnail.jpg?width=640&height=640&fit=bounds)




![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Learning Transferable Visual Models From Natural Language Supervision](https://cdn.slidesharecdn.com/ss_thumbnails/dlkobayashi0115-210115012308-thumbnail.jpg?width=640&height=640&fit=bounds)
















![[Kim+ ICML2012] Dirichlet Process with Mixed Random Measures : A Nonparametri...](https://cdn.slidesharecdn.com/ss_thumbnails/dp-mrmkimicml2012-120727233419-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)












































