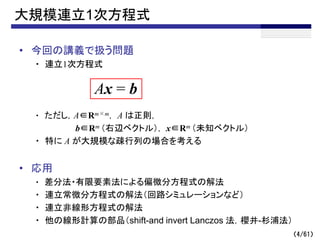
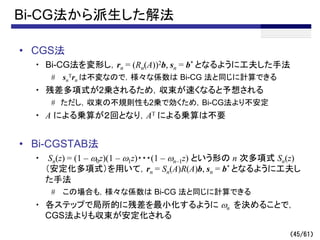
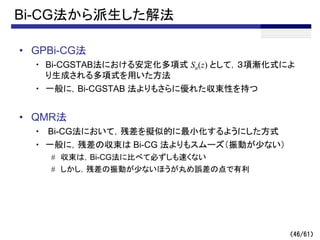
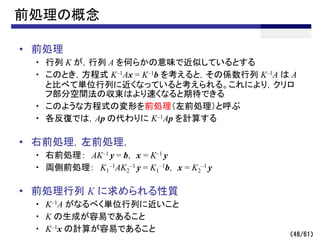
(61/61)
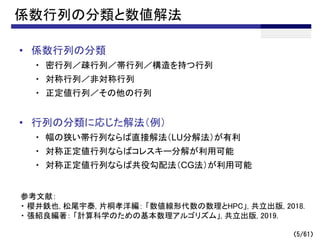
参考文献
• L. N.Trefethen and D. Bau III: “Numerical Linear Algebra”, SIAM,
Philadelphia, 1997.
• H. A. van der Vorst: “Iterative Krylov Methods for Large Linear Systems”,
Cambridge University Press, Cambridge, 2003.
• Y. Saad: “Iterative Methods for Sparse Linear Systems”, 2nd Ed., SIAM,
Philadelphia, 2003.
• R. Barrett et al.: “Templates for the Solution of Linear Systems: Building
Blocks for Iterative Methods”, SIAM, Philadelphia, 1994.
• 藤野清次, 張紹良: “反復法の数理”, 朝倉書店, 1996.
• 杉原正顯, 室田一雄: “線形計算の数理”, 岩波書店, 2009.
• 櫻井鉄也, 松尾宇泰, 片桐孝洋: “数値線形代数の数理とHPC”, 共立出版, 2018.
• 張紹良編著: “計算科学のための基本数理アルゴリズム”, 共立出版, 2019.






![[DL輪読会]Attention Is All You Need](https://cdn.slidesharecdn.com/ss_thumbnails/dlhacks170714-170714005330-thumbnail.jpg?width=640&height=640&fit=bounds)








![SSII2022 [TS1] Transformerの最前線〜 畳込みニューラルネットワークの先へ 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts120220608ssiitransformerr2-220607054025-3adacf07-thumbnail.jpg?width=640&height=640&fit=bounds)








![[DL輪読会]`強化学習のための状態表現学習 -より良い「世界モデル」の獲得に向けて-](https://cdn.slidesharecdn.com/ss_thumbnails/20181026staterepresenration-181127055206-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]Pay Attention to MLPs (gMLP)](https://cdn.slidesharecdn.com/ss_thumbnails/kobayashi-210528032327-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Grokking: Generalization Beyond Overfitting on Small Algorithmic Datasets](https://cdn.slidesharecdn.com/ss_thumbnails/20220325okimura-220405024717-thumbnail.jpg?width=640&height=640&fit=bounds)







































