回帰分析とモデル選択1
4.1 Classical CurveFitting
4.2 Nonlinear Regression and Gradient
Descent
4.3 Regression and Ax=b: Over- and Under-
Determinant systems
4.4 Optimization as the Cornerstone of
Regression
4.5 The Pareto Front
4.6 Model Selection : Cross-Validation
4.7 Model Selection: Information Criteria
4.
回帰分析とモデル選択1
% 4.1 ClassicalCurve Fitting
CH04_SEC01_LinearRegression.m
% 4.2 Nonlinear Regression and Gradient Descent
CH04_SEC02_1_GradientDescent.m
% 4.3 Regression and Ax=b
CH04_SEC03_1_OverUnderDetermined.m
CH04_SEC03_1_OverUnderDetermined_production.
m
% 4.4 Optimization as Cornerstone of Regression
CH04_SEC04_1_CompareRegression.m
CH04_SEC04_1_CompareRegression_production.m
% 4.6 Model Selection: Cross-Validation
CH04_SEC06_1_kFoldValidation.m
CH04_SEC06_1_kFoldValidation_production.m
% 4.7 Model Selection: Information Criteria
CH04_SEC07_1_ModelValidation.m
CH04_SEC07_2_RegressAIC_BIC.m
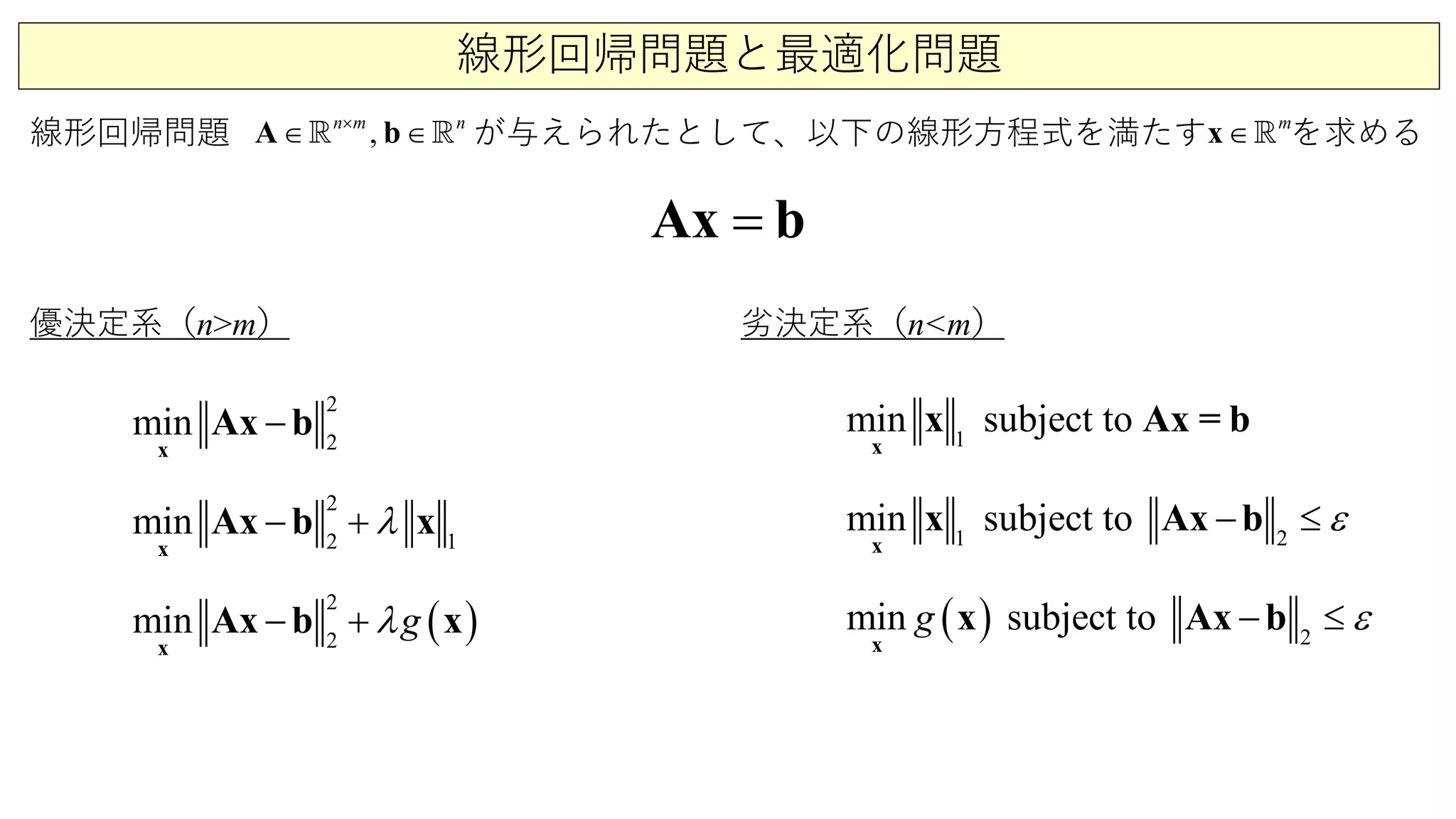
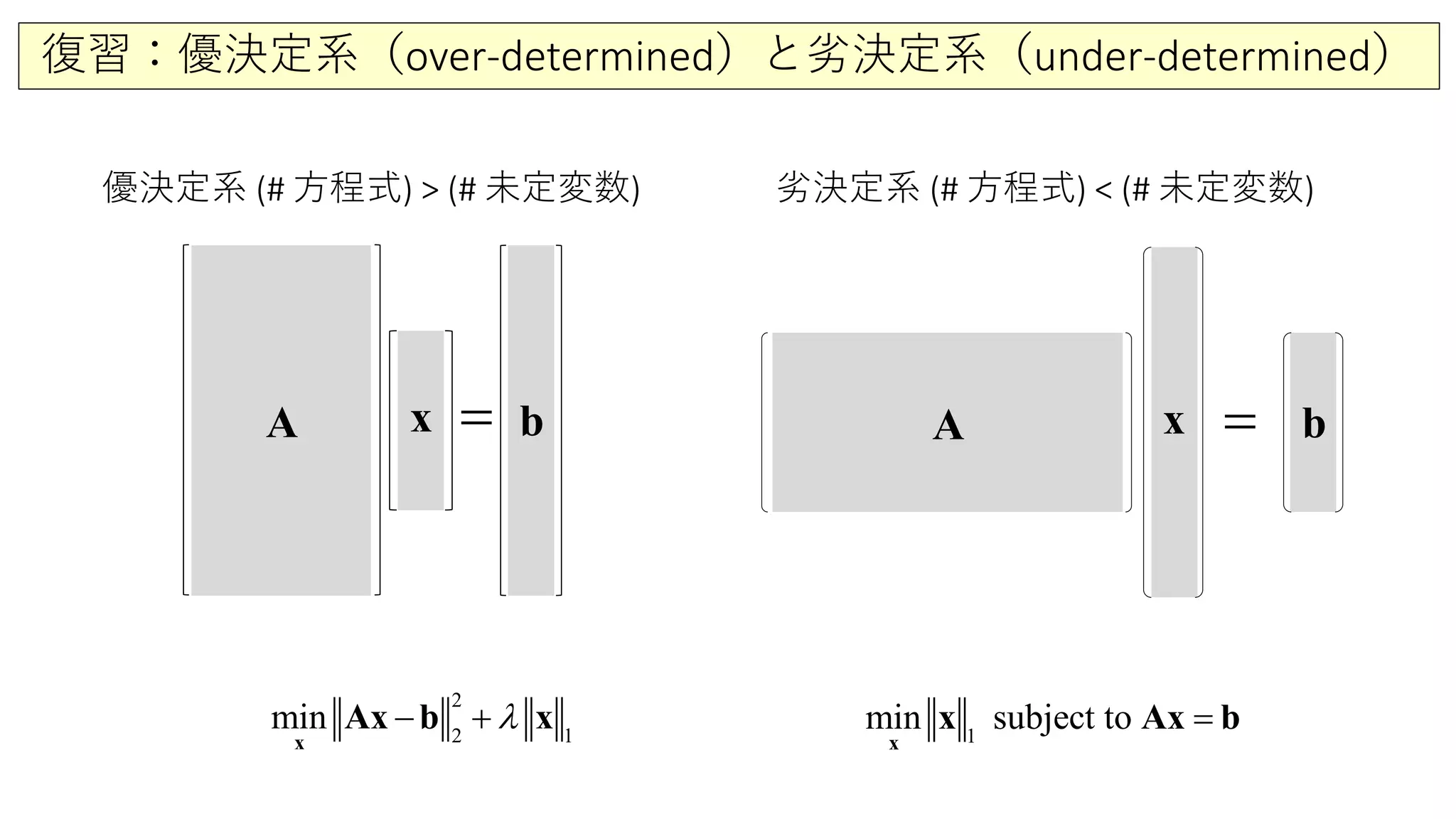
線形回帰問題と最適化問題
線形回帰問題 が与えられたとして、以下の線形方程式を満たす を求める
=Axb
,n m n×
∈ ∈A b m
∈x
優決定系(n>m)
2
2
min −
x
Ax b
2
2 1
min λ− +
x
Ax xb
( )
2
2
min gλ− +
x
xAx b
劣決定系(n<m)
1
min subject to
x
x Ax = b
1 2
min subject to ε− ≤
x
x Ax b
( ) 2
min subject tog ε− ≤
x
x Ax b
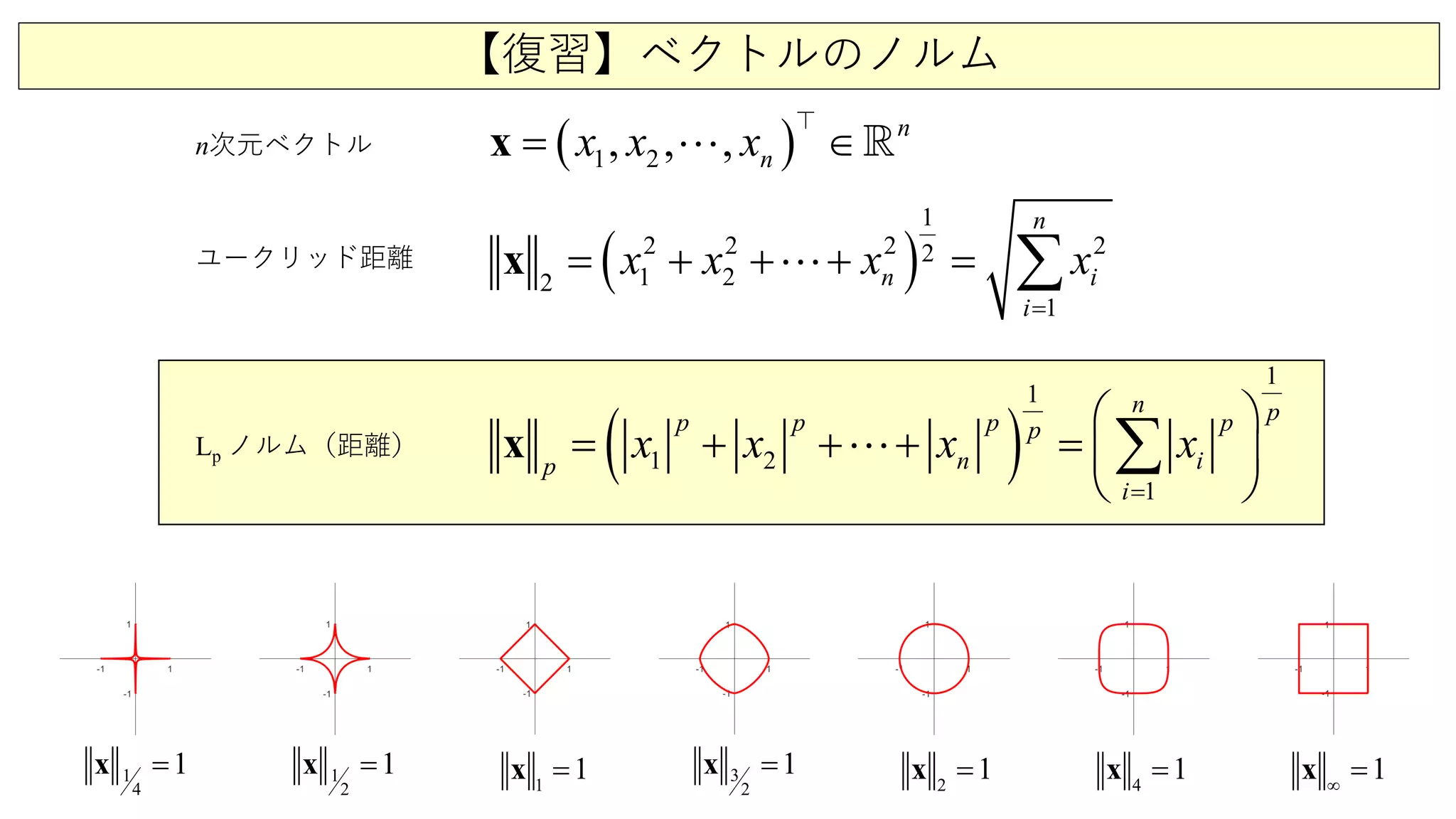
【復習】ベクトルのノルム
( )2
1
2 222
1 22
1
n
n i
i
x xx x
=
= + + =+ ∑x
( )1 2, , , n
nx x x= ∈x
( )2
1
1
1
1
n pp p p pp
i
i
np
x x x x
=
= + ++ =
∑x
n次元ベクトル
ユークリッド距離
Lp ノルム(距離)
1
4
1=x 1∞
=x1
2
1=x
1
1=x 3
2
1=x
2
1=x 4
1=x
9.
線形回帰問題:複数評価関数の比較1
( )( )
2
20 1
1
1
, ,k
k
k
n
E f x y
n
β β
=
−∑
( )01 1
1
1
, ,k k
n
k
E f x y
n
β β
=
−∑
( )0 1max , , kk
k
E f x yβ β∞ −
例1:外れ値がない「きれいなデータ」の場合
どの誤差関数もほぼ同じ線形モデル。
CH04_SEC01_LinearRegression.m
% The data
x=[1 2 3 4 5 6 7 8 9 10];
y=[0.2 0.5 0.3 0.7 1.0 1.5 1.8 2.0 2.3 2.2];
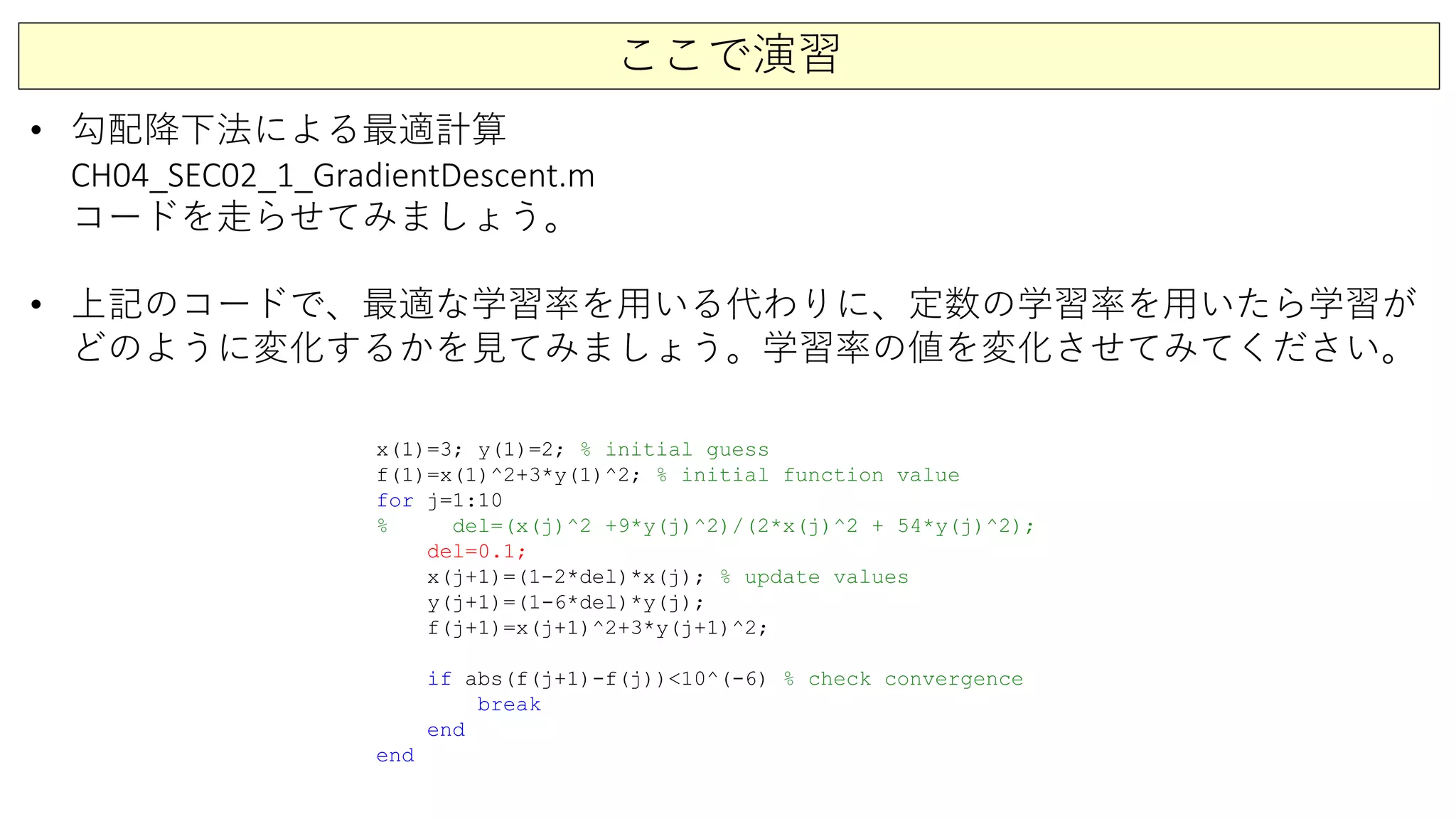
ここで演習
• 最適化による線形回帰問題の例
CH04_SEC01_LinearRegression.m
コードを走らせてみましょう。データの値を変更し、外れ値があるときのL1, L2,L∞
ノルム解の振る舞いを調べてみましょう。
y=[0.2 0.5 0.3 0.7 1.0 1.5 1.8 2.0 2.3 2.2]
y=[0.2 0.5 0.3 3.5 1.0 1.5 1.8 2.0 2.3 2.2]
上記のコードに追加して、L1/2ノルム解を計算してみましょう。
( )( )1
1/
2
2
1/2
1
0, , k
n
k
k
E f x yβ β
=
= −
∑
q4=fminsearch(@(x0,x,y) sum(abs( x0(1)*x+x0(2)-y ).^(0.5) )^2,[1 1],[],x,y); % L1/2 norm
15.
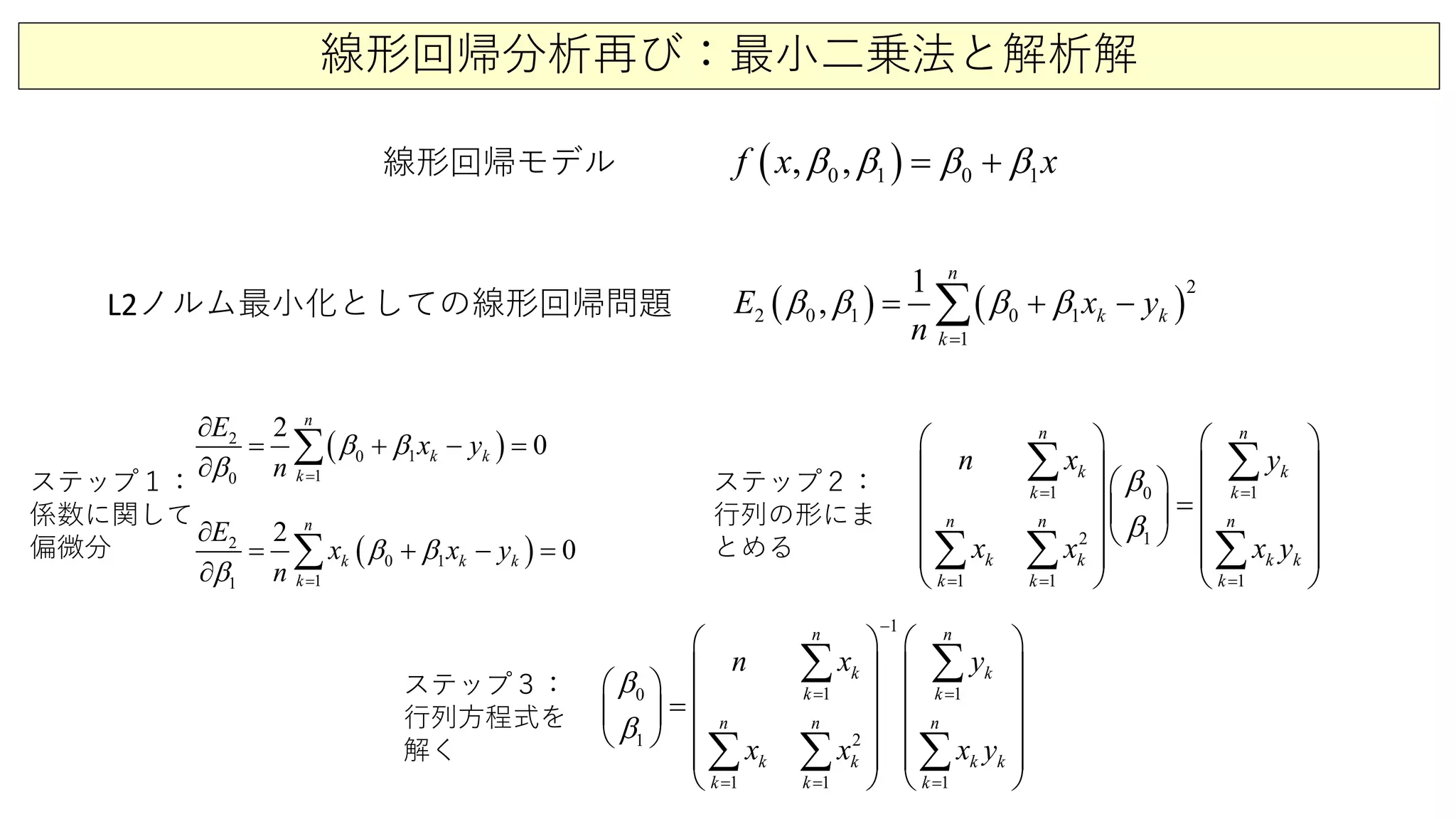
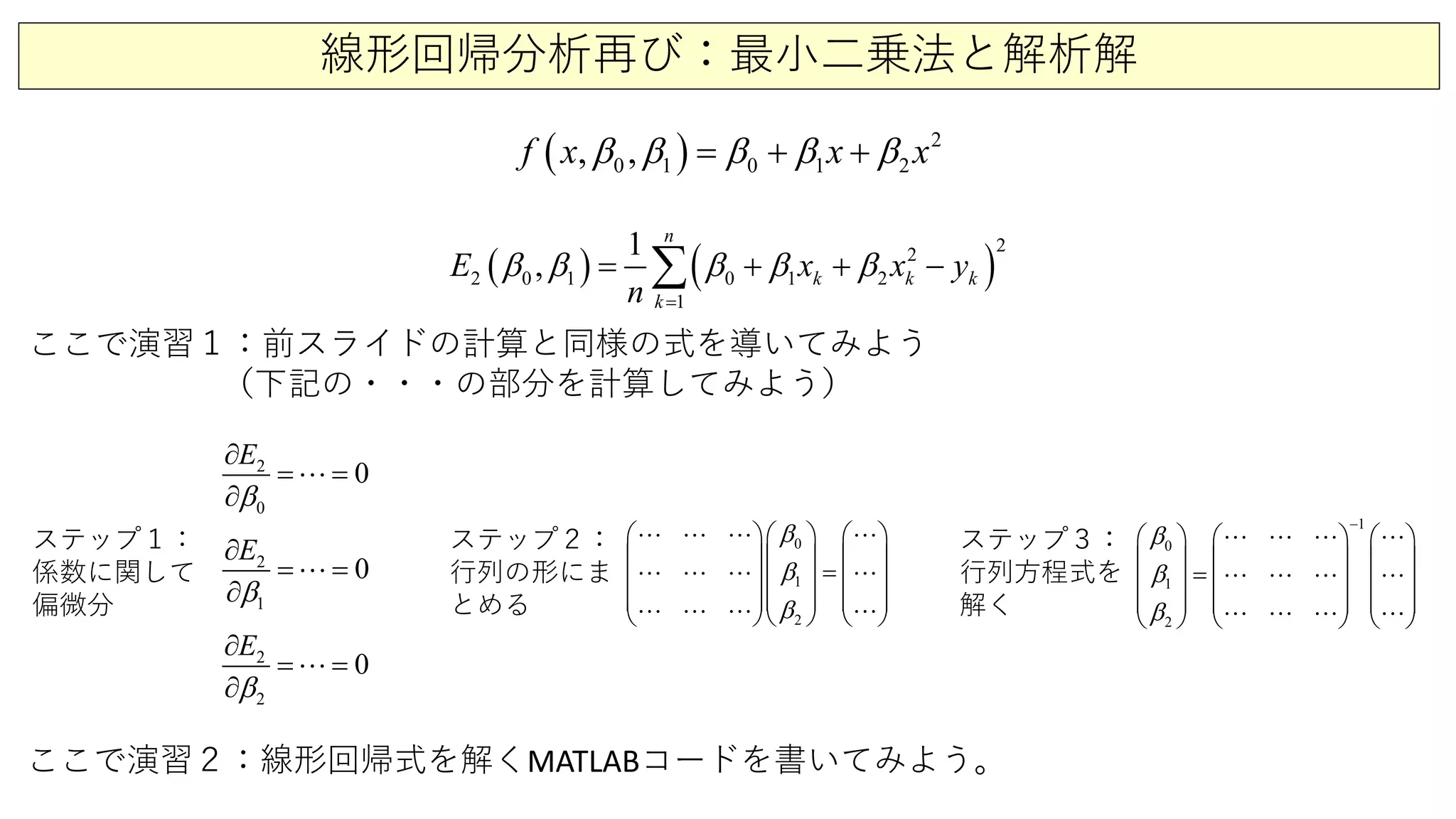
線形回帰分析再び:最小二乗法と解析解
( )0 10 1, ,f x xβ β β β= +
( ) ( )
2
2 0 1 0 1
1
,
1
k
k
n
kE x y
n
β β β β
=
−+= ∑
( )1
1
2
0
0
2
0k
k
k
n
E
x y
n
β β
β =
=
∂
∂
+ − =∑
( )0
1
2
1
1
2
0
k
k k k
n
E
x x y
n
β β
β =
∂
= +
∂
− =∑
0
2 1
1 1
1 1 1
n n
k
k k
n n n
k
k k
k k
k
k
k
n x y
x x x y
β
β
= =
= = =
=
∑ ∑
∑ ∑ ∑
ステップ1:
係数に関して
偏微分
ステップ2:
行列の形にま
とめる
ステップ3:
行列方程式を
解く
1
1 1
1 1 1
0
21
n n
k k
n n n
k k k
k k
k k k k
n x y
x x x y
β
β
−
= =
= = =
=
∑ ∑
∑ ∑ ∑
線形回帰モデル
L2ノルム最小化としての線形回帰問題
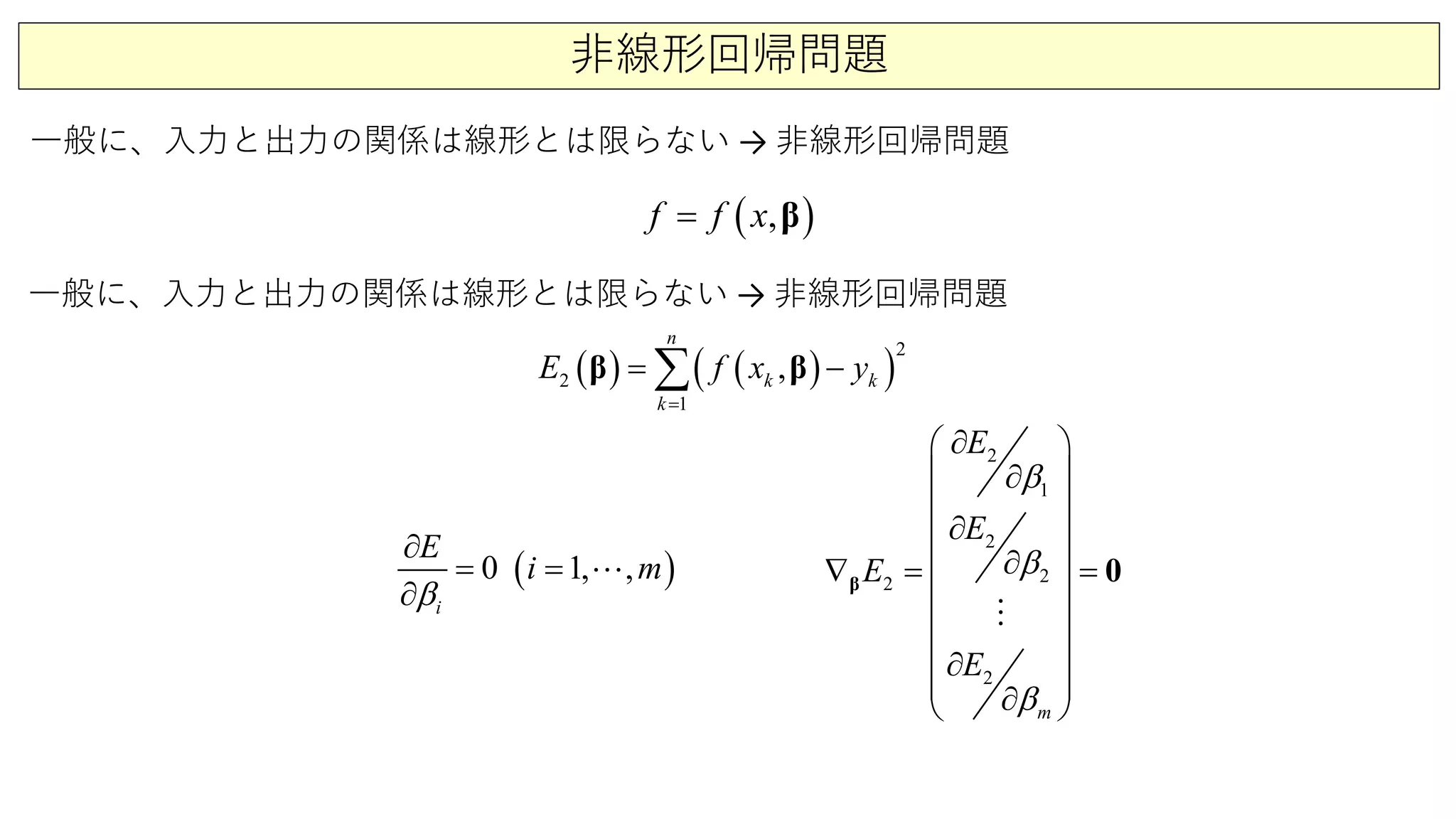
非線形回帰問題
一般に、入力と出力の関係は線形とは限らない → 非線形回帰問題
(),f f x= β
( ) ( )( )
1
2
2 ,
n
k
k kE f x y
=
= −∑β β
( )0 ,1,
i
mi
E
β
= =
∂
∂
2
1
2
2 2
2
m
E
E
E
E
β
β
β
∂
∂
∂
∂∇
∂
∂
= =
β 0
一般に、入力と出力の関係は線形とは限らない → 非線形回帰問題
18.
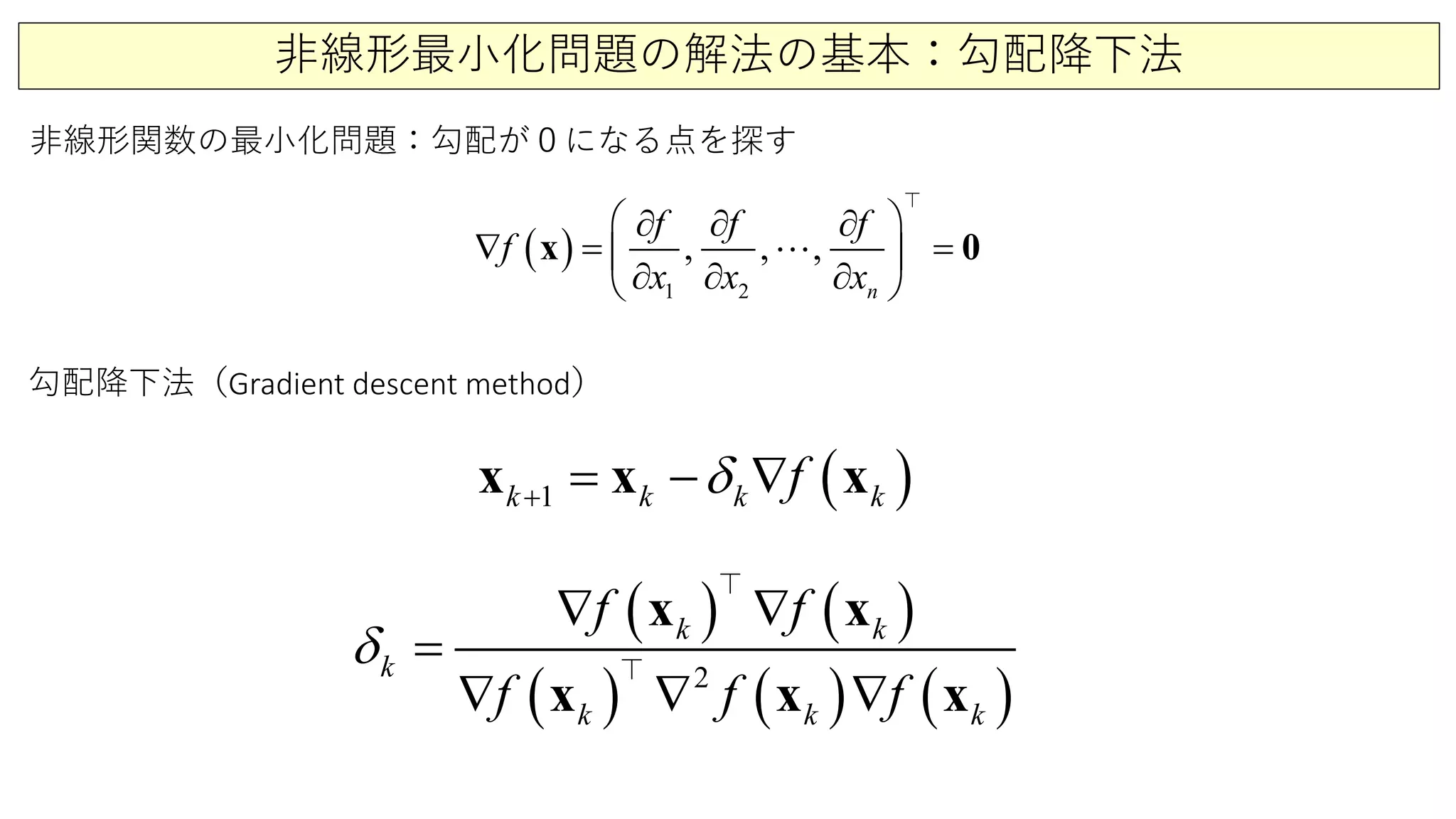
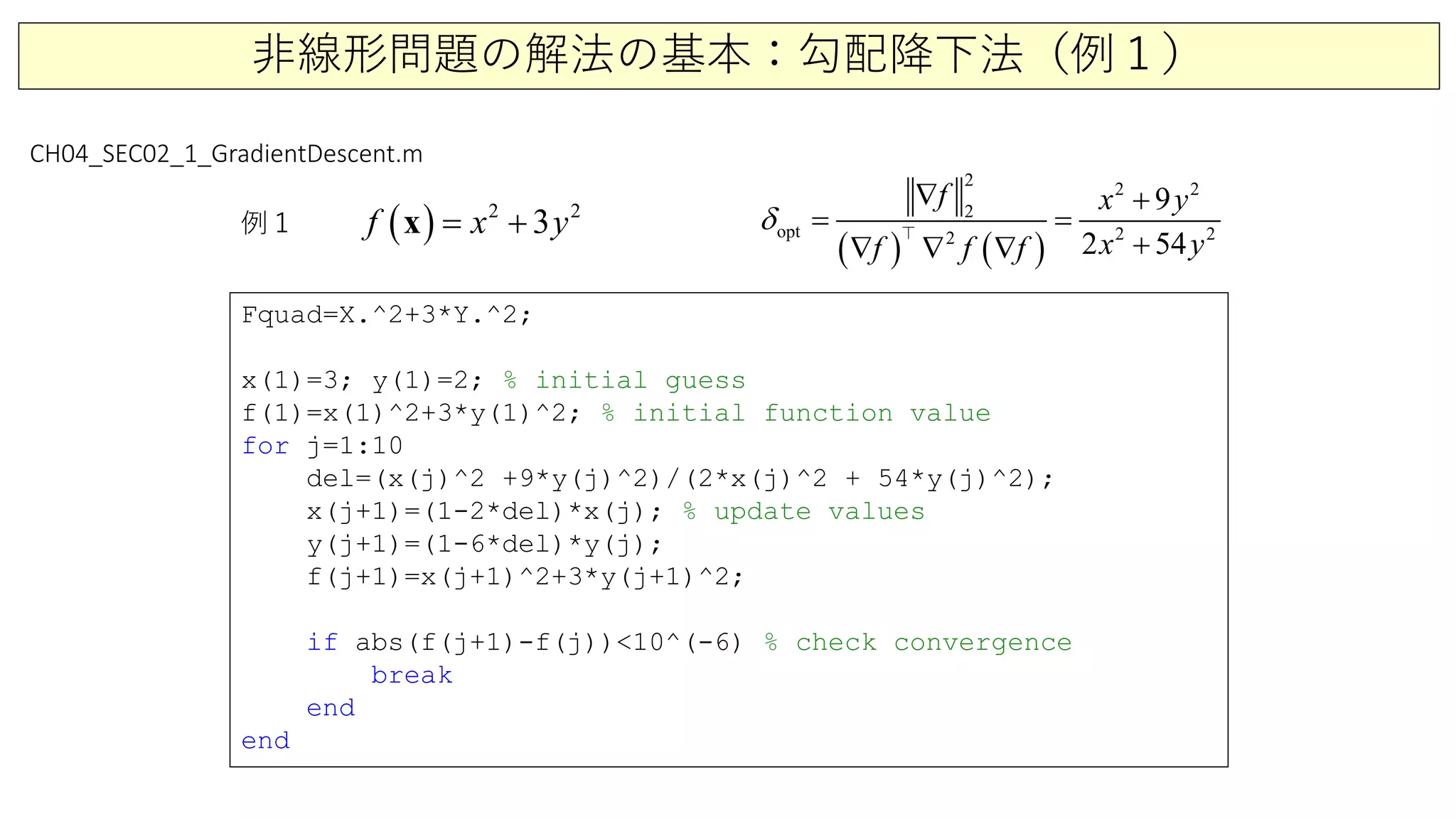
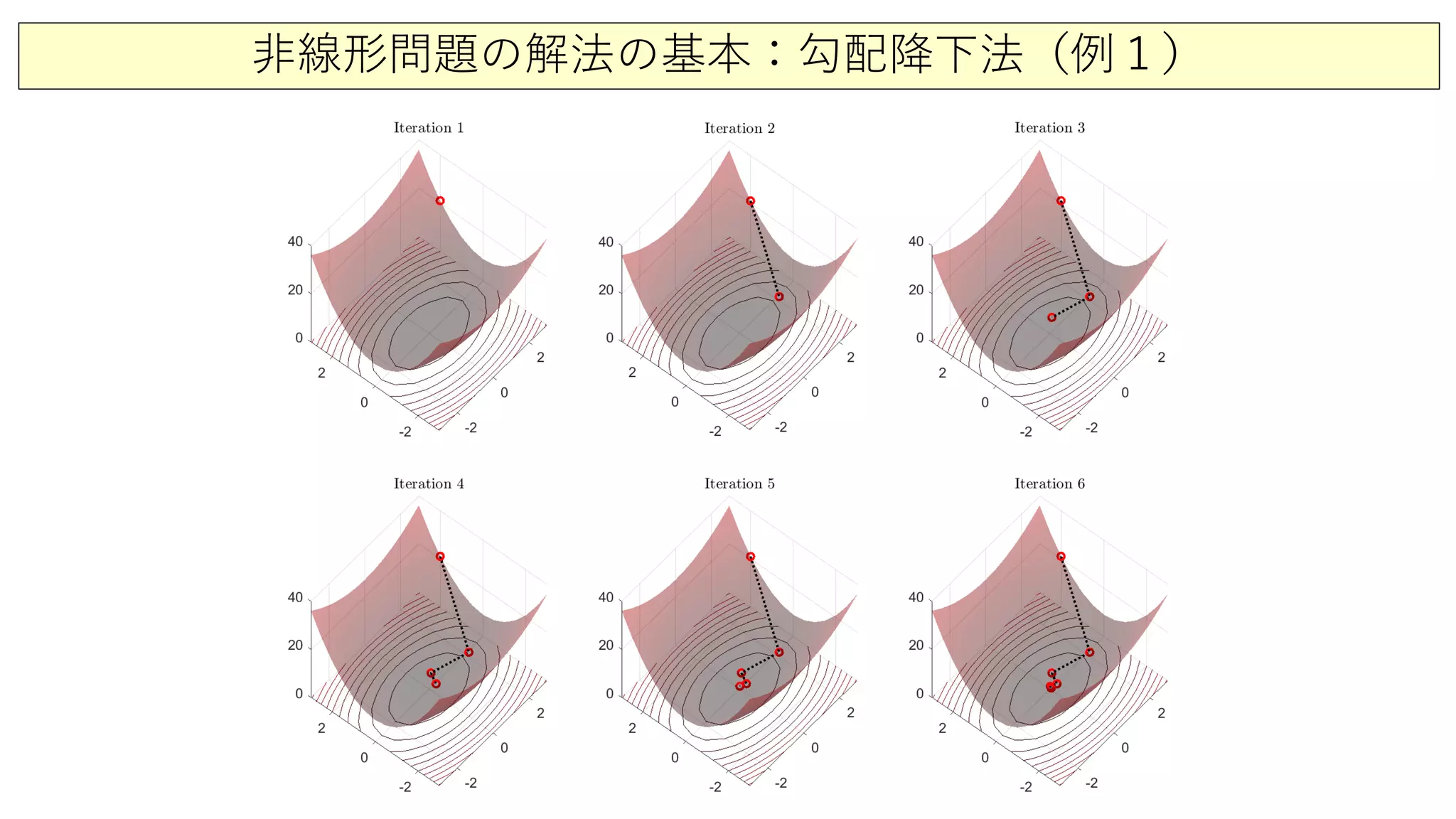
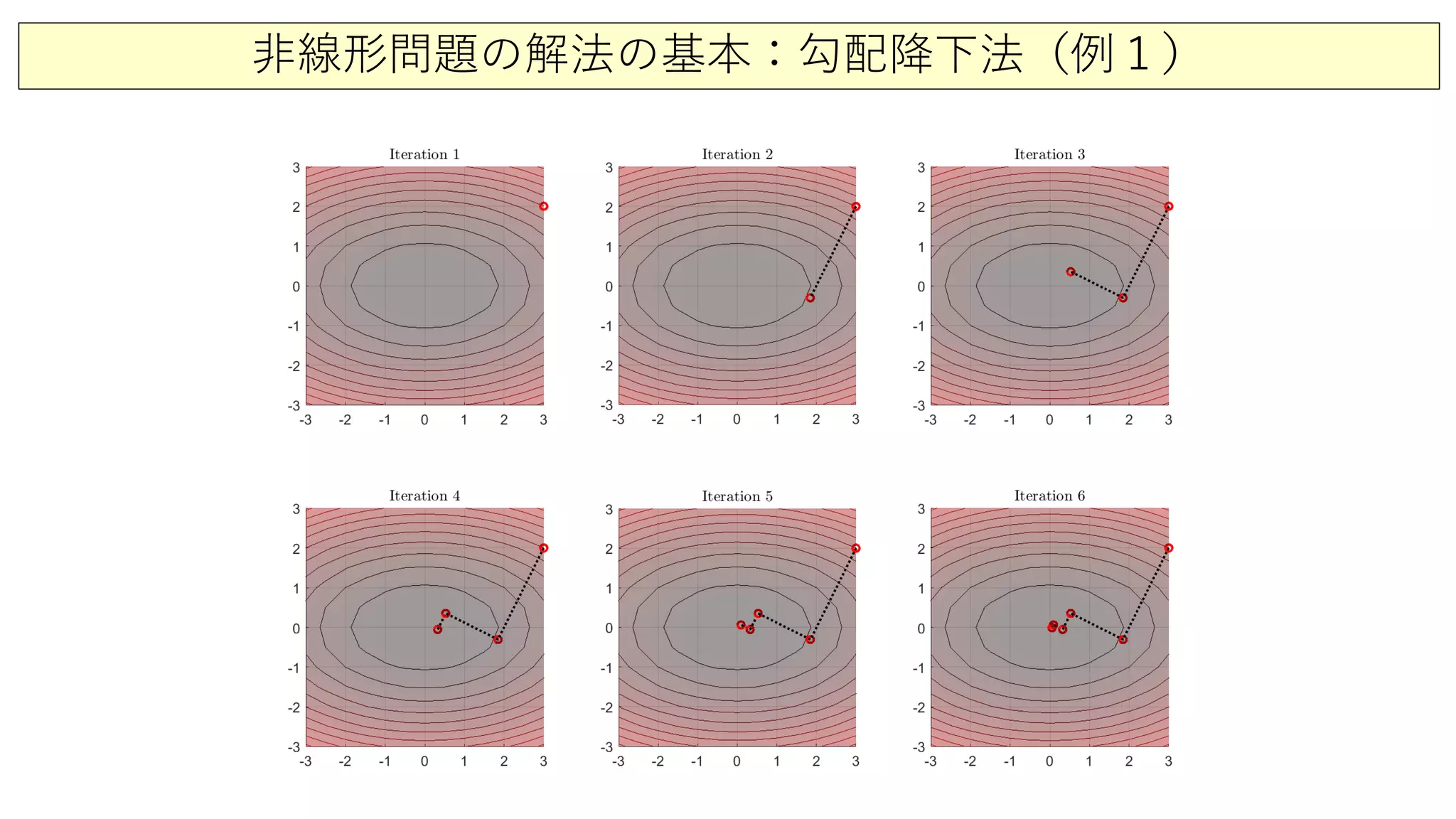
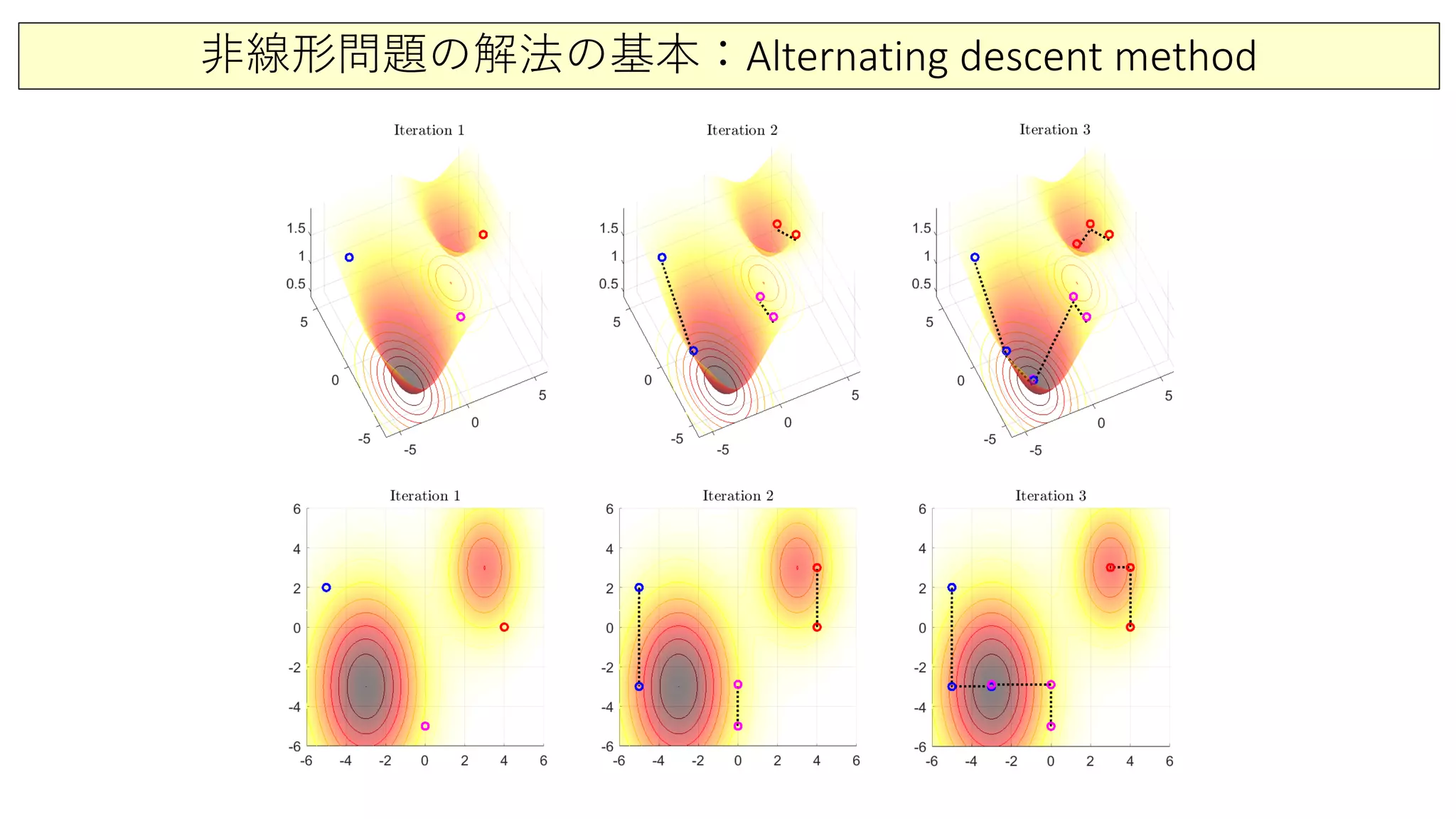
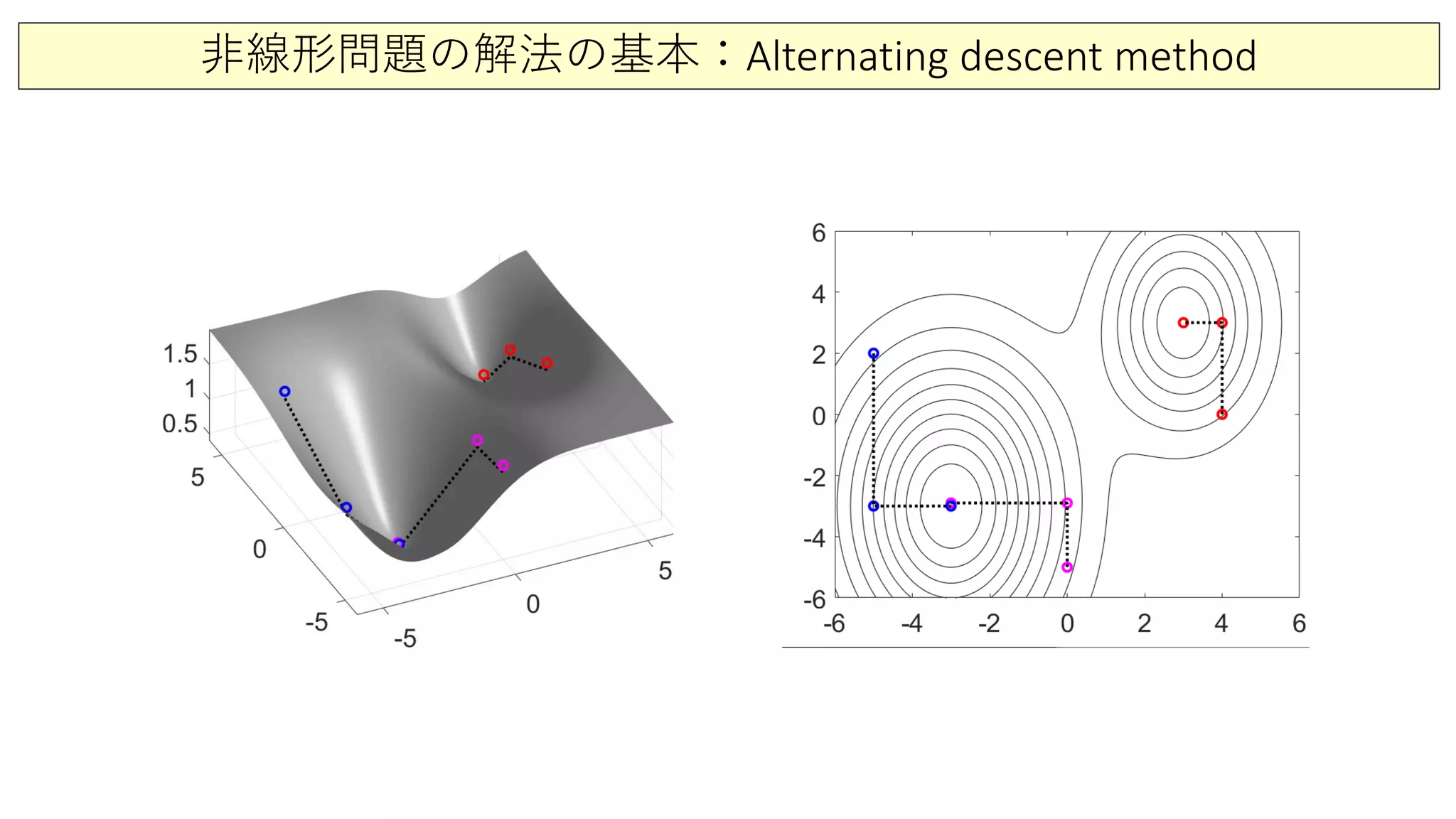
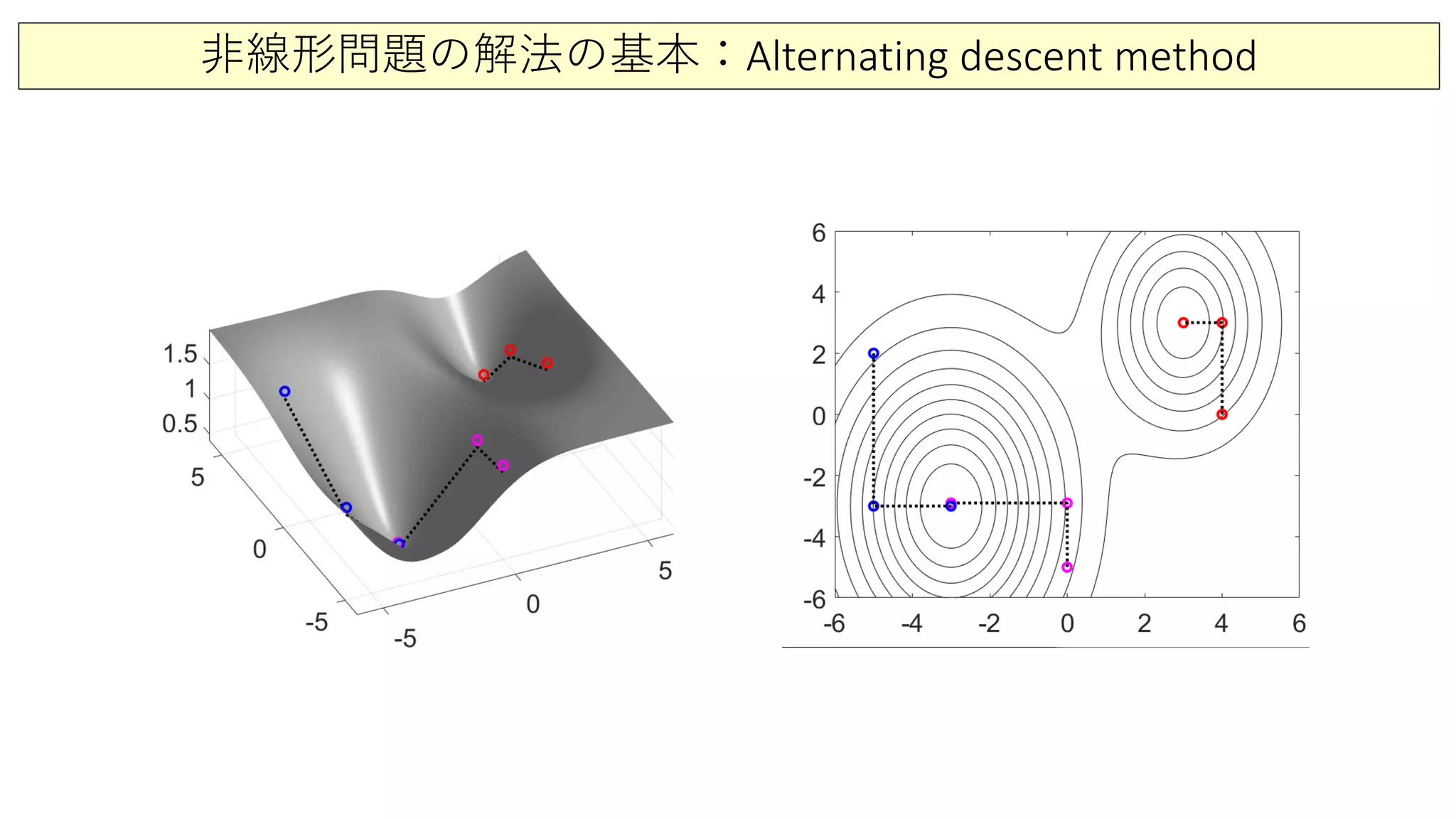
非線形最小化問題の解法の基本:勾配降下法
( )
1 2
,, ,
n
f f f
f
x x x
∂ ∂ ∂
∇= =
∂ ∂ ∂
x 0
( )1k k k kfδ+= − ∇xx x
非線形関数の最小化問題:勾配が0になる点を探す
( ) ( )
( ) ( ) ( )2
k k
k
k k k
f f
f f f
δ
∇
=
∇
∇ ∇ ∇
x x
x x x
勾配降下法(Gradient descent method)
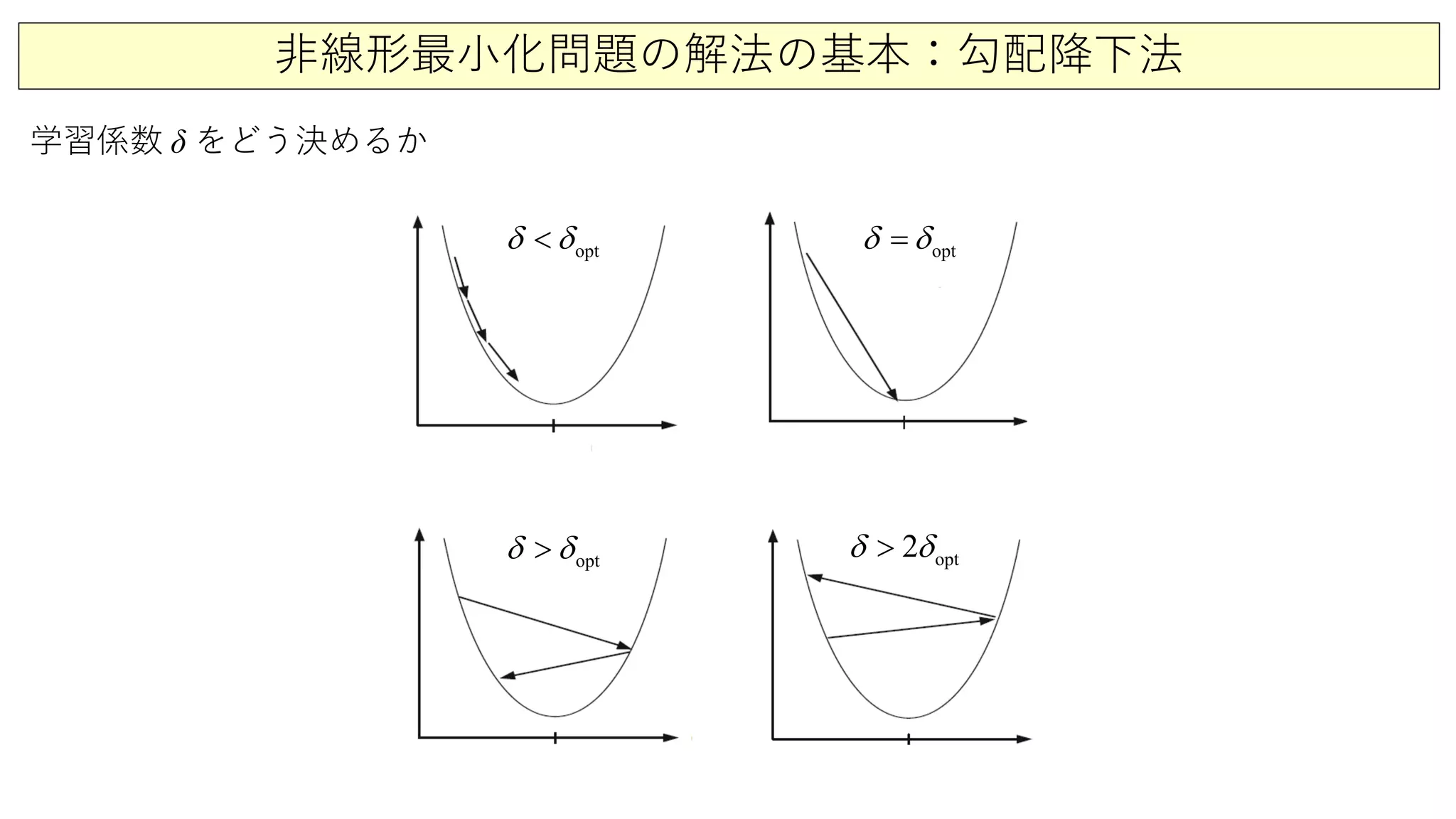
非線形最小化問題の解法の基本:勾配降下法
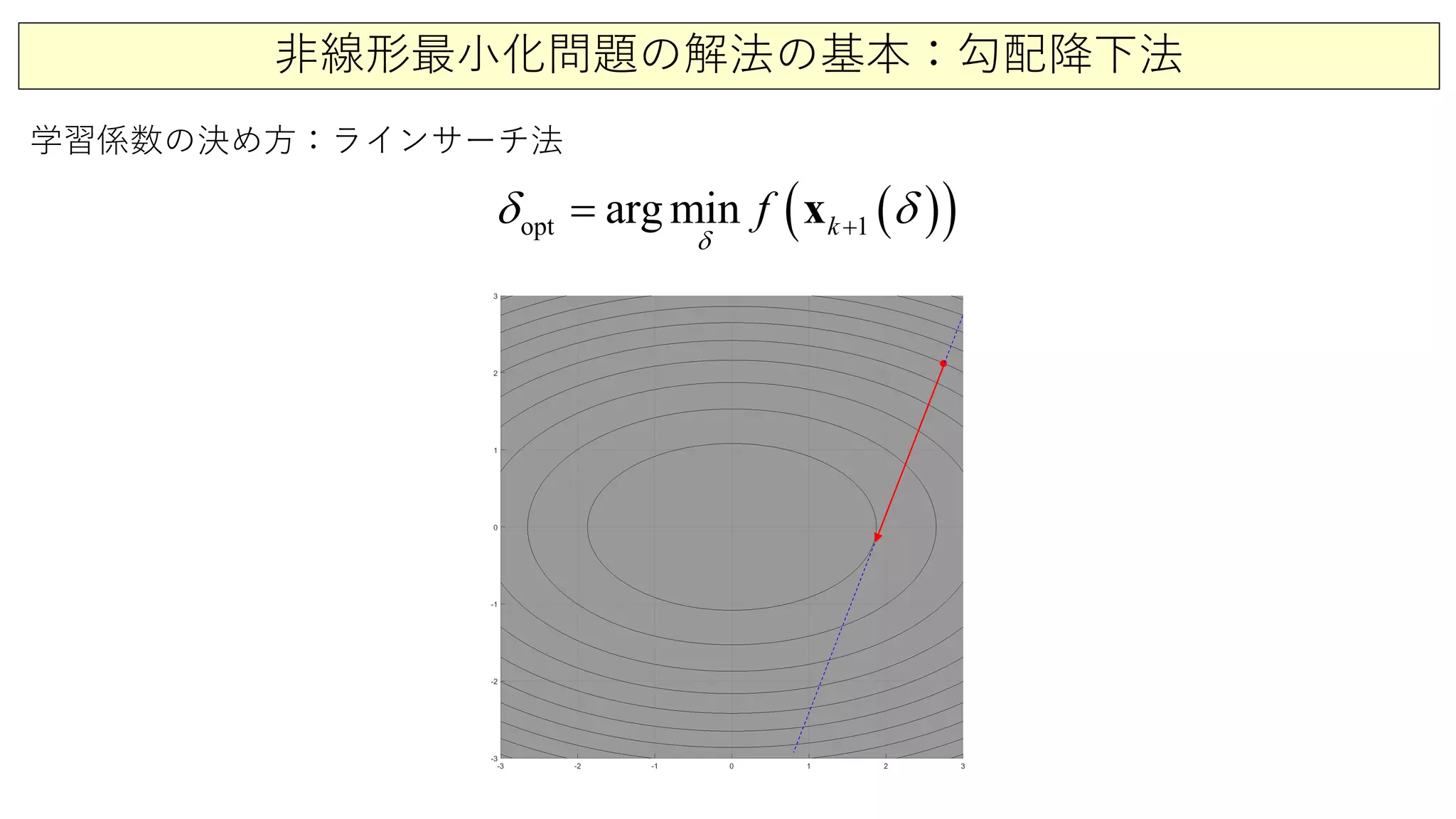
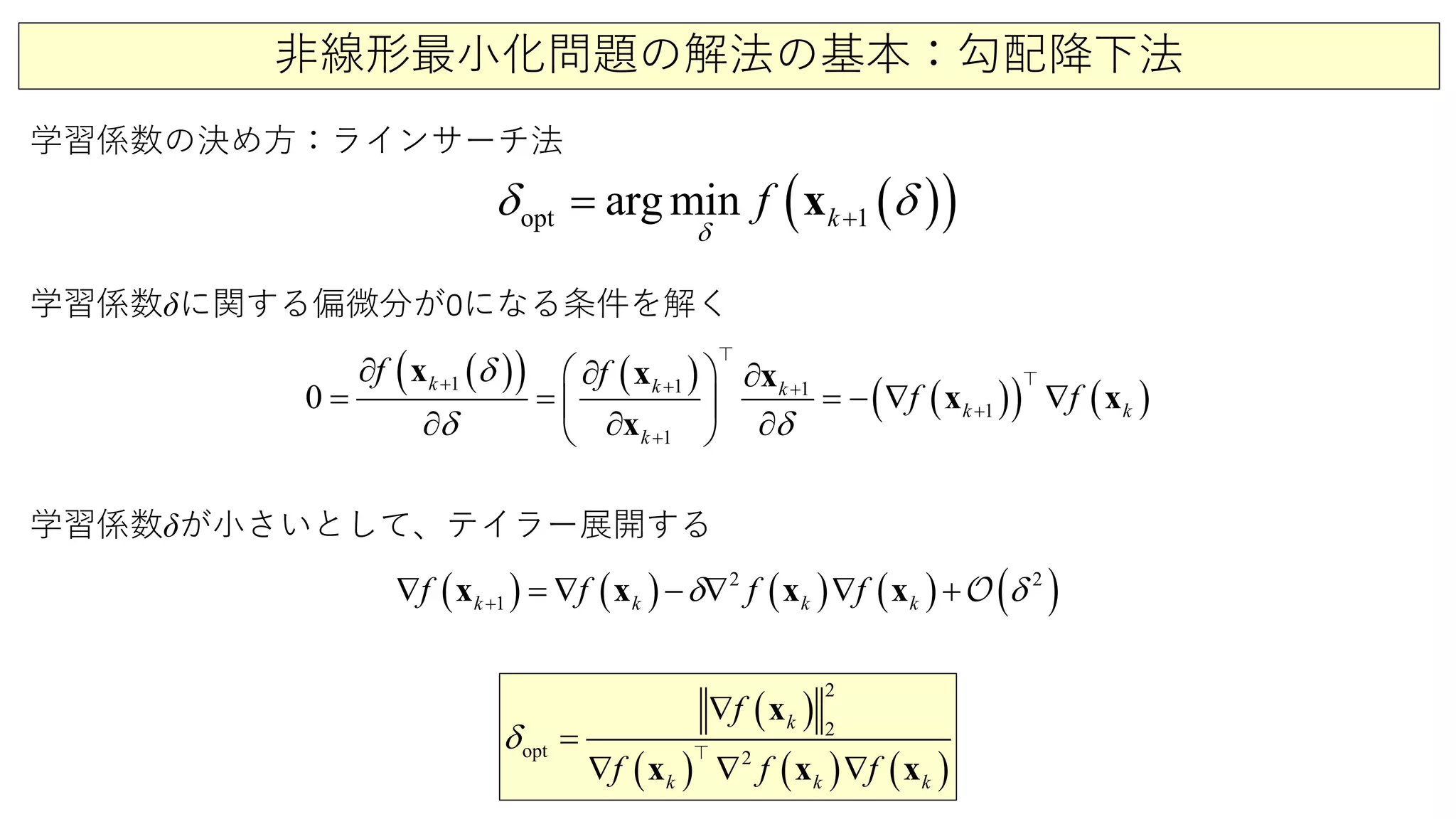
学習係数の決め方:ラインサーチ法
( )( )opt1arg min kf
δ
δ δ+= x
( )( ) ( )
( )( ) ( )1 1 1
1
1
0
k k k
k k
k
f f
f f
δ
δ δ
+ + +
+
+
∂ ∂
∂
= =− ∇ ∇
∂ ∂ ∂
=
x x x
x x
x
( ) ( ) ( ) ( ) ( )2 2
1k k k kf f f fδ δ+∇ =∇ − ∇ ∇ +x x x x
( )
( ) ( ) ( )
2
opt 2
2k
k k k
f
f f f
δ
∇
=
∇
∇ ∇
x
x x x
学習係数δに関する偏微分が0になる条件を解く
学習係数δが小さいとして、テイラー展開する
22.
非線形最小化問題の解法の基本:勾配降下法
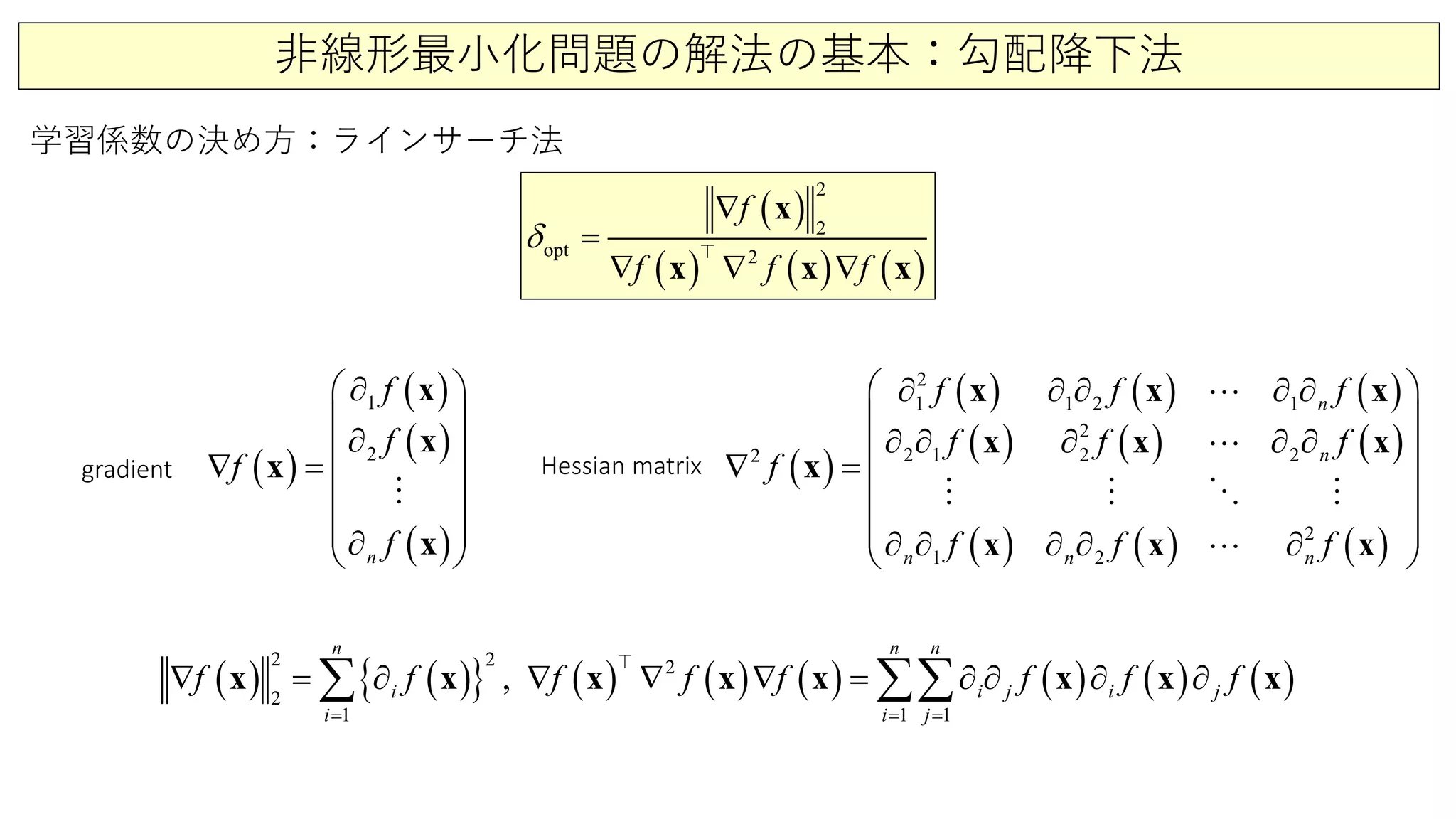
学習係数の決め方:ラインサーチ法
( )
( )( ) ( )
opt 2
2
2
f
f f f
δ
∇
∇
=
∇ ∇
x
x x x
( )
( )
( )
( )
2
1
n
f
f
f
f
∂
∂ ∇ =
∂
x
x
x
x
( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
1
2
1 1 2
2
1
2
2
2 1 2 2
2
n
n
n nn
f f f
f f f
f
f f f
∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∇ =
∂ ∂ ∂ ∂ ∂
x x x
x x x
x
x x x
gradient Hessian matrix
( ) ( ){ } ( ) ( ) ( ) ( ) ( ) ( )
2 2
1
2
2
11
,
n
i
n n
i i
i j
j j
i
f f f ff f f f
= ==
∇ ∂ ∇ ∇= ∇ = ∂ ∂ ∂ ∂∑∑∑ x x x xx x x x
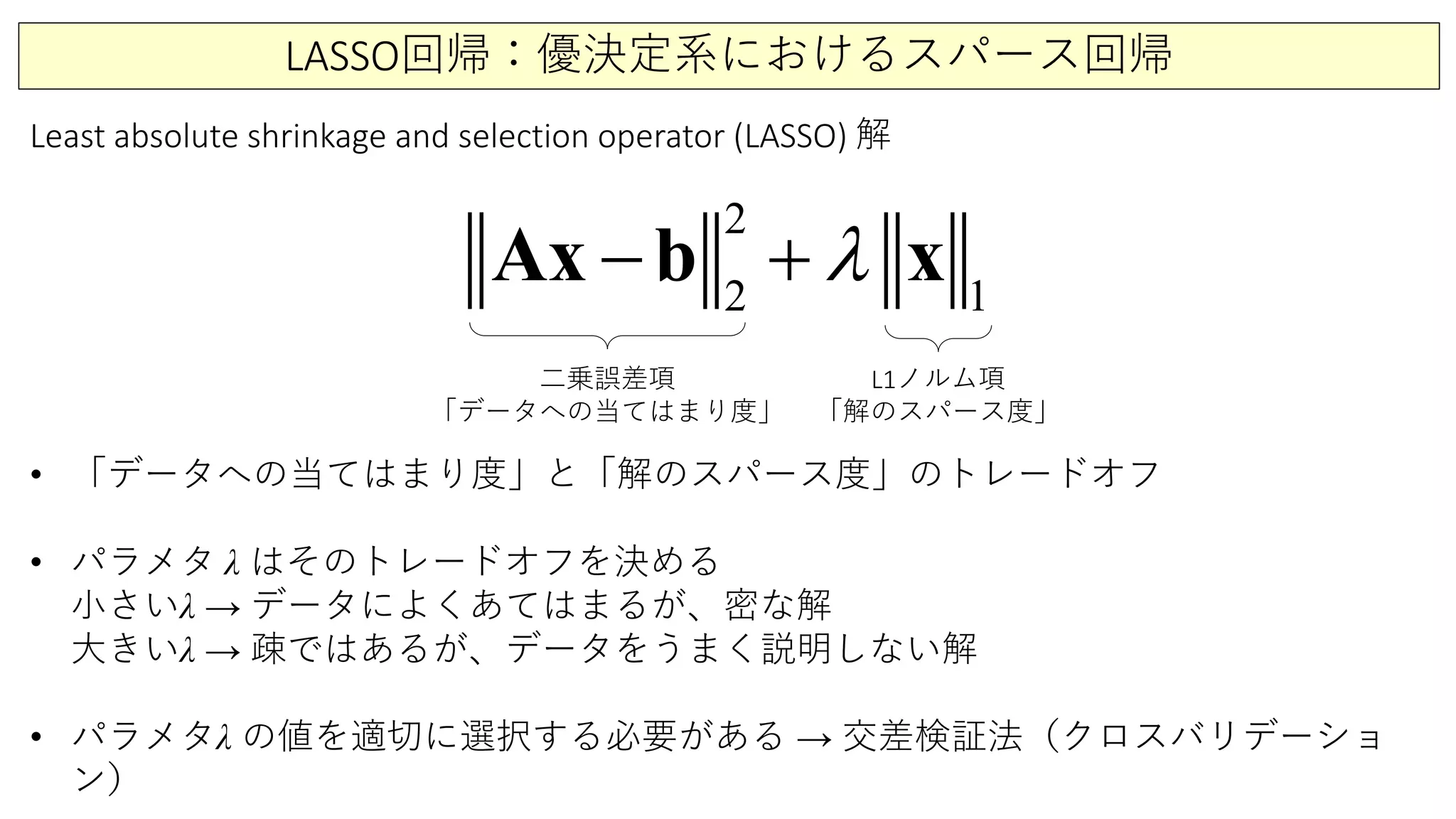
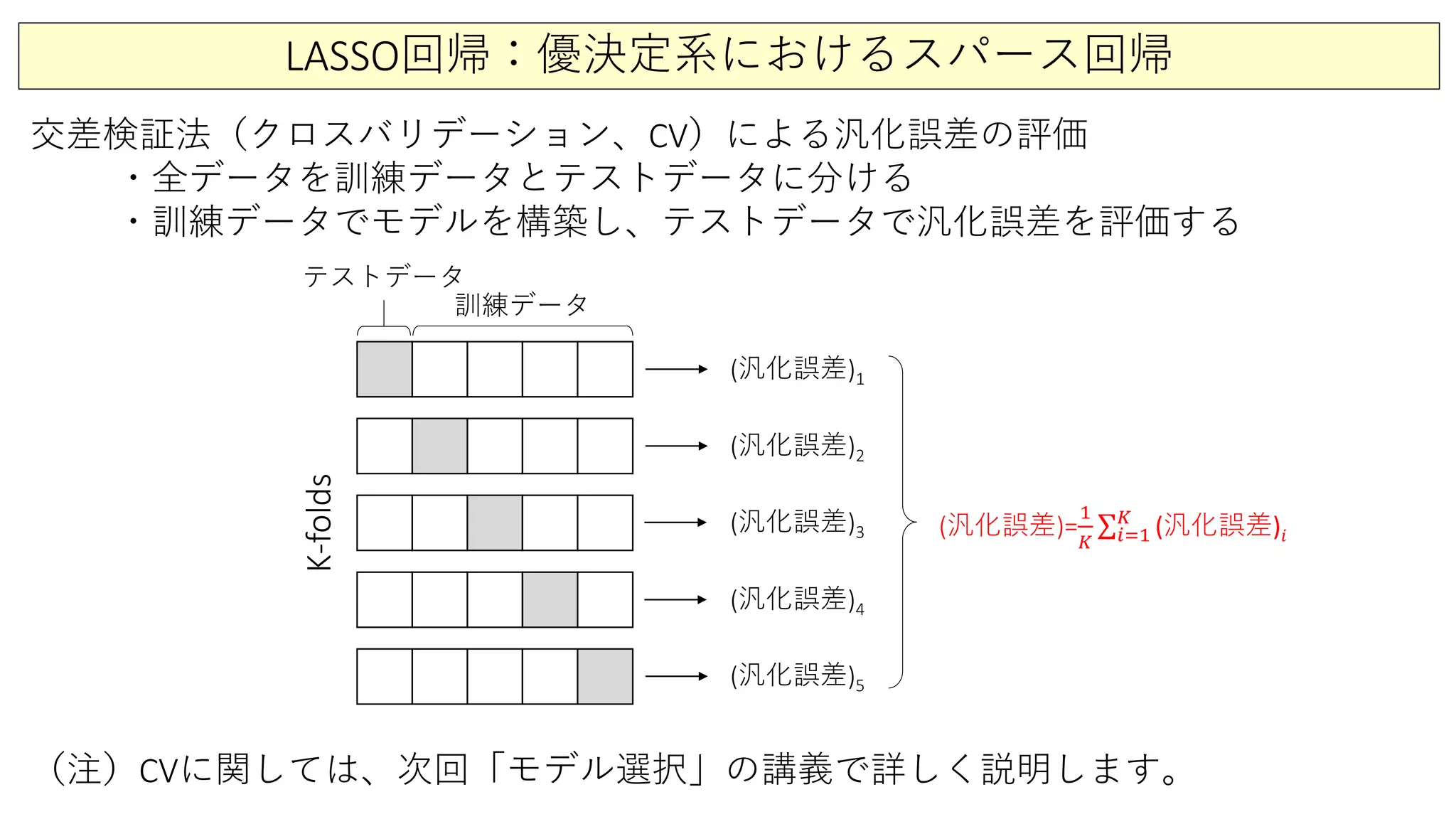
LASSO回帰:優決定系におけるスパース回帰
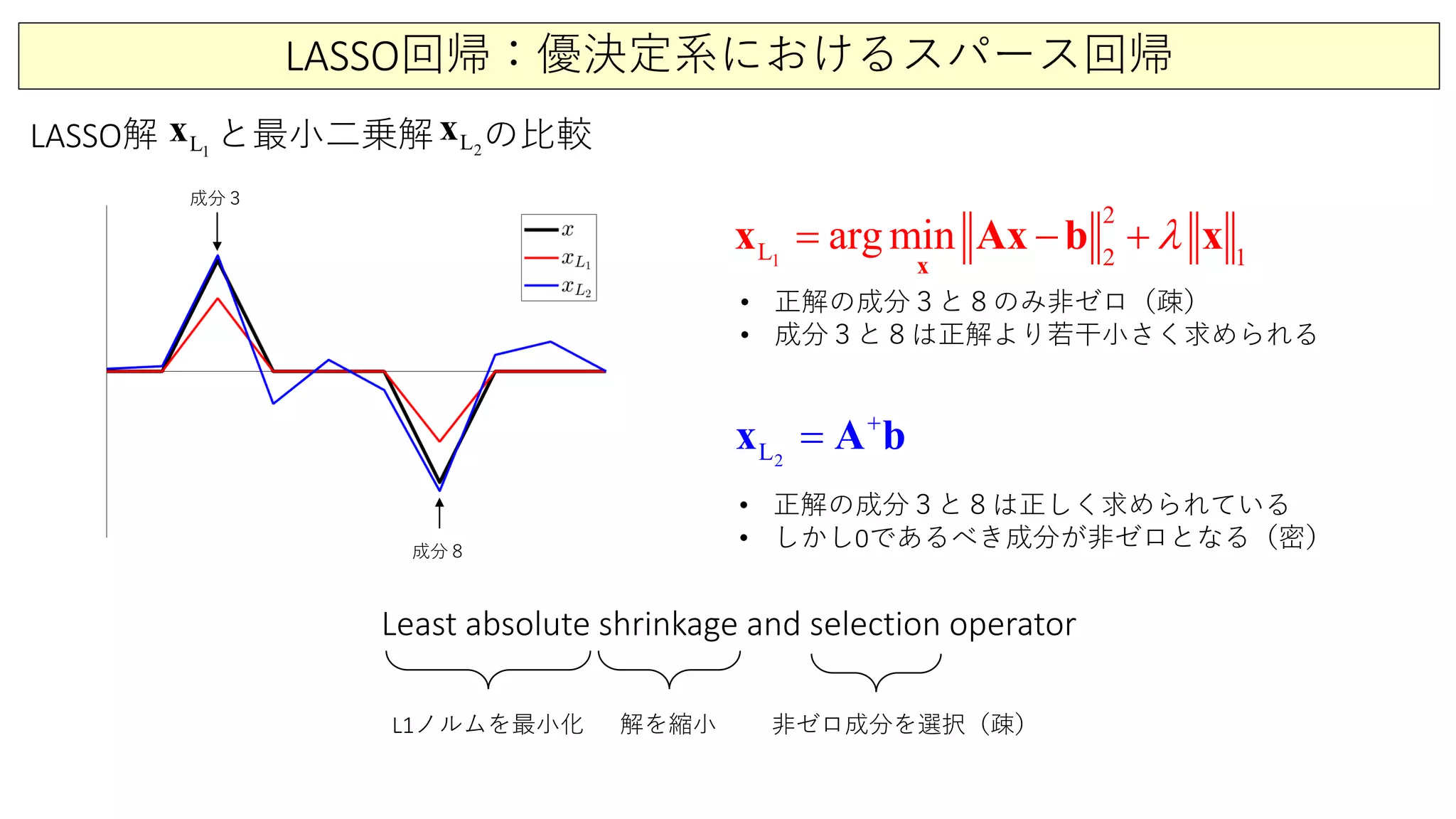
LASSO解 と最小二乗解 の比較
2L
+
=xA b
1
2
L 2 1
arg min λ= − +
x
x Ax b x
1Lx 2Lx
• 正解の成分3と8は正しく求められている
• しかし0であるべき成分が非ゼロとなる(密)
• 正解の成分3と8のみ非ゼロ(疎)
• 成分3と8は正解より若干小さく求められる
Least absolute shrinkage and selection operator
L1ノルムを最小化 解を縮小 非ゼロ成分を選択(疎)
成分3
成分8

![線形回帰問題:複数評価関数の比較1
( )( )
2
2 0 1
1
1
, ,k
k
k
n
E f x y
n
β β
=
−∑
( )01 1
1
1
, ,k k
n
k
E f x y
n
β β
=
−∑
( )0 1max , , kk
k
E f x yβ β∞ −
例1:外れ値がない「きれいなデータ」の場合
どの誤差関数もほぼ同じ線形モデル。
CH04_SEC01_LinearRegression.m
% The data
x=[1 2 3 4 5 6 7 8 9 10];
y=[0.2 0.5 0.3 0.7 1.0 1.5 1.8 2.0 2.3 2.2];](https://image.slidesharecdn.com/6regressionanalysisandmodelselection1-200811225017/75/6-1-9-2048.jpg)
![線形回帰問題:複数評価関数の比較2
例2:外れ値を含むデータの場合
E1は外れ値に対して頑健!
外れ値(outlier)
CH04_SEC01_LinearRegression.m
( )( )
2
2 0 1
1
1
, ,k
k
k
n
E f x y
n
β β
=
−∑
( )01 1
1
1
, ,k k
n
k
E f x y
n
β β
=
−∑
( )0 1max , , kk
k
E f x yβ β∞ −
% The data
x=[1 2 3 4 5 6 7 8 9 10];
y=[0.2 0.5 0.3 3.5 1.0 1.5 1.8 2.0 2.3 2.2];](https://image.slidesharecdn.com/6regressionanalysisandmodelselection1-200811225017/75/6-1-10-2048.jpg)
![線形回帰問題:複数評価関数の比較
% 外れ値を含むデータ
x=[1 2 3 4 5 6 7 8 9 10];
y=[0.2 0.5 0.3 3.5 1.0 1.5 1.8 2.0 2.3 2.2];
% 外れ値を含まないデータ
x=[1 2 3 4 5 6 7 8 9 10];
y=[0.2 0.5 0.3 0.7 1.0 1.5 1.8 2.0 2.3 2.2];
p1=fminsearch('fit1',[1 1],[],x,y); % L_infinity norm
p2=fminsearch('fit2',[1 1],[],x,y); % L1 norm
p3=fminsearch('fit3',[1 1],[],x,y); % L2 norm
xf=0:0.1:11;
y1=polyval(p1,xf); y2=polyval(p2,xf); y3=polyval(p3,xf);
CH04_SEC01_LinearRegression.m fit1.m (L∞ norm)
function E=fit1(x0,x,y)
E=max(abs( x0(1)*x+x0(2)-y ));
fit2.m (L1 norm)
fit3.m (L2 norm)
function E=fit2(x0,x,y)
E=sum(abs( x0(1)*x+x0(2)-y ));
function E=fit3(x0,x,y)
E=sum(abs( x0(1)*x+x0(2)-y ).^2 );](https://image.slidesharecdn.com/6regressionanalysisandmodelselection1-200811225017/75/6-1-11-2048.jpg)
![最適化問題の数値解法 fminsearch
p1=fminsearch('fit1',[1 1],[],x,y);
function E=fit1(x0,x,y)
E=max(abs( x0(1)*x+x0(2)-y ));
例1:関数mファイルを別個に用意する方法
最適化する関数 パラメタの初期値 関数に与えるほかのデータ
例2:無名関数(inline function)を用いる方法
q1=fminsearch(@(x0,x,y) max(abs( x0(1)*x+x0(2)-y )), ...
[1 1],[],x,y); % L_infinity norm](https://image.slidesharecdn.com/6regressionanalysisandmodelselection1-200811225017/75/6-1-12-2048.jpg)
![ここで演習
• 最適化による線形回帰問題の例
CH04_SEC01_LinearRegression.m
コードを走らせてみましょう。データの値を変更し、外れ値があるときのL1, L2, L∞
ノルム解の振る舞いを調べてみましょう。
y=[0.2 0.5 0.3 0.7 1.0 1.5 1.8 2.0 2.3 2.2]
• 上記のコードに追加して、L1/2ノルム解を計算してみましょう。
( )( )1
1/
2
2
1/2
1
0, , k
n
k
k
E f x yβ β
=
= −
∑](https://image.slidesharecdn.com/6regressionanalysisandmodelselection1-200811225017/75/6-1-13-2048.jpg)
![ここで演習
• 最適化による線形回帰問題の例
CH04_SEC01_LinearRegression.m
コードを走らせてみましょう。データの値を変更し、外れ値があるときのL1, L2, L∞
ノルム解の振る舞いを調べてみましょう。
y=[0.2 0.5 0.3 0.7 1.0 1.5 1.8 2.0 2.3 2.2]
y=[0.2 0.5 0.3 3.5 1.0 1.5 1.8 2.0 2.3 2.2]
上記のコードに追加して、L1/2ノルム解を計算してみましょう。
( )( )1
1/
2
2
1/2
1
0, , k
n
k
k
E f x yβ β
=
= −
∑
q4=fminsearch(@(x0,x,y) sum(abs( x0(1)*x+x0(2)-y ).^(0.5) )^2,[1 1],[],x,y); % L1/2 norm](https://image.slidesharecdn.com/6regressionanalysisandmodelselection1-200811225017/75/6-1-14-2048.jpg)
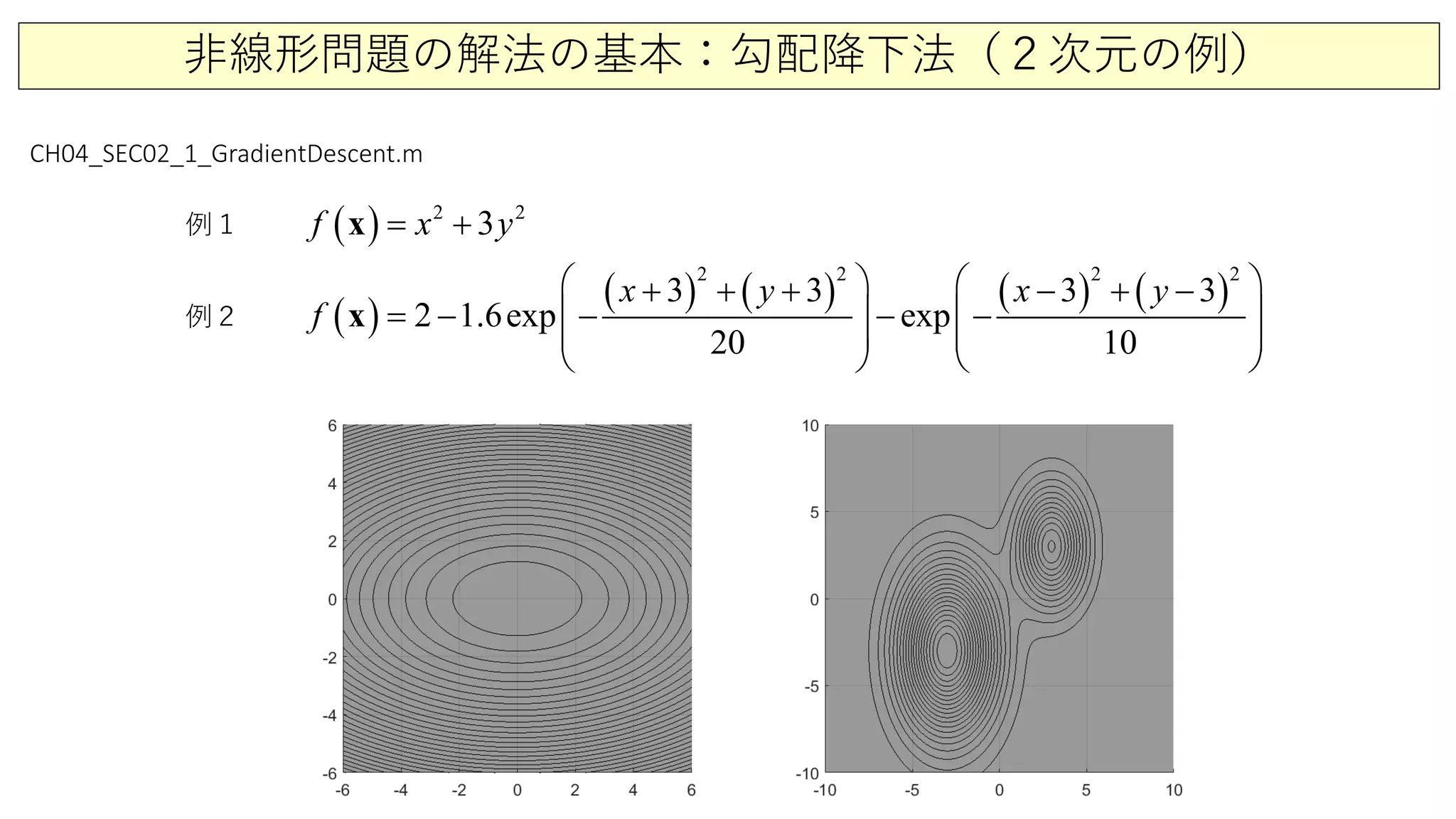
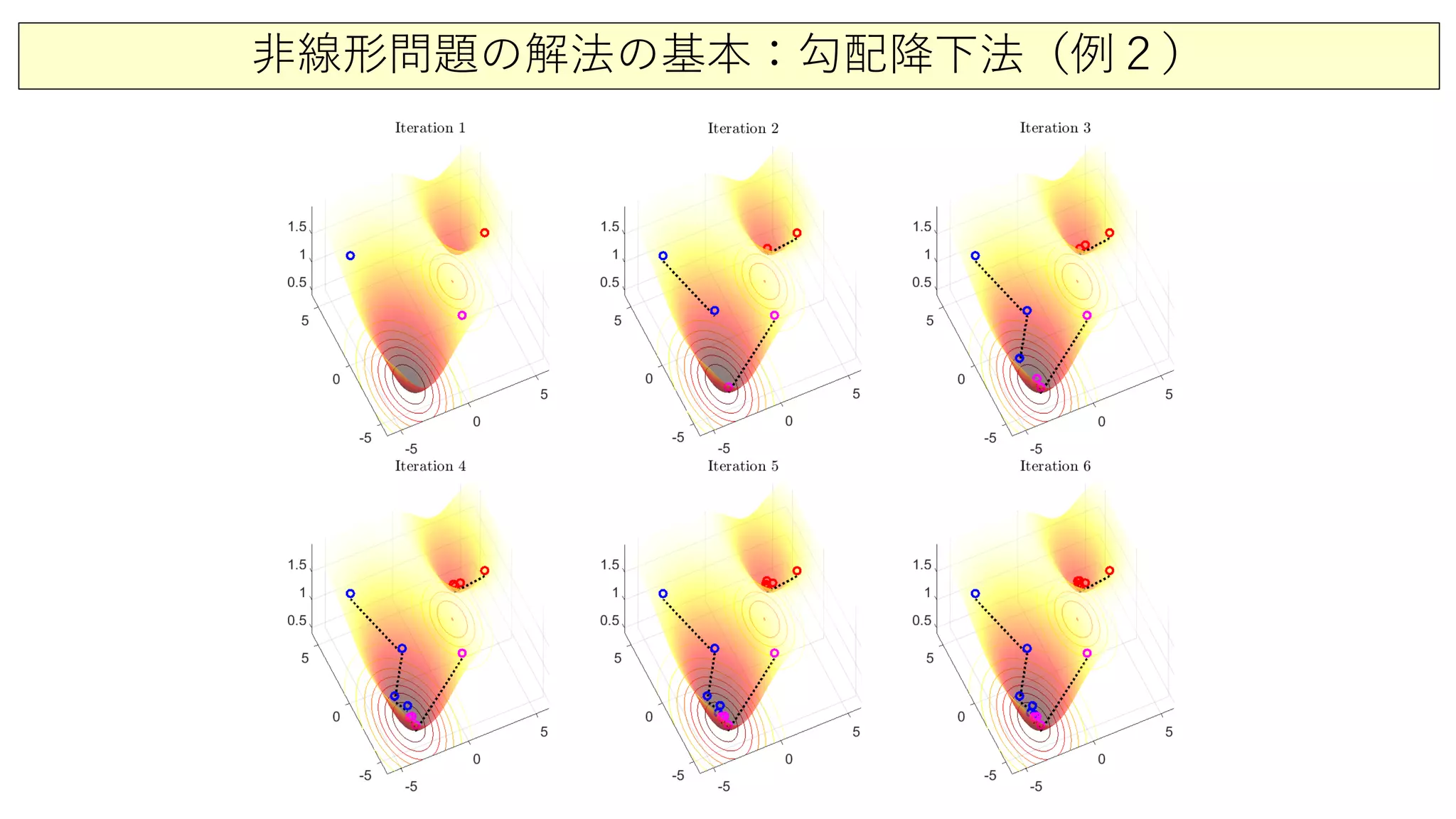
![非線形問題の解法の基本:勾配降下法(例1)
for j=1:10
del=fminsearch('delsearch',0.2,[],x(end),y(end),dfx,dfy,X,Y,F);
% optimal tau
x(j+1)=x(j)-del*dfx; % update x, y, and f
y(j+1)=y(j)-del*dfy;
f(j+1)=interp2(X,Y,F,x(j+1),y(j+1));
dfx=interp2(X,Y,dFx,x(j+1),y(j+1));
dfy=interp2(X,Y,dFy,x(j+1),y(j+1));
if abs(f(j+1)-f(j))<10^(-6) % check convergence
break
end
end
CH04_SEC02_1_GradientDescent.m
例2 ( )
( ) ( ) ( ) ( )
2 2 2 2
3 3 3 3
2 1.6exp exp
20 10
x y x y
f
+ + + − + −
=− − − −
x](https://image.slidesharecdn.com/6regressionanalysisandmodelselection1-200811225017/75/6-1-27-2048.jpg)
![非線形問題の解法の基本:fminsearch
例1
例2
( ) 2 2
3f x y= +x
( )
( ) ( ) ( ) ( )
2 2 2 2
3 3 3 3
2 1.6exp exp
20 10
x y x y
f
+ + + − + −
=− − − −
x
fun1 = @(x) (x(1)^2+3*x(2)^2);
xopt1 = fminsearch(fun1, [3;4])
% xopt1 =
% 1.0e-04 *
% 0.4130
% 0.1310
fun2 = @(x) 2-1.6*exp(-((x(1)+3)^2+(x(2)+3)^2)/20)-exp(-((x(1)-3)^2+(x(2)-3)^2)/10);
xopt2 = fminsearch(fun2, [-1;-1])
% xopt2 =
% -2.9943
% -2.9943
xopt2 = fminsearch(fun2, [1;1])
% xopt2 =
% 2.8459
% 2.8459
demo_fminsearch.m](https://image.slidesharecdn.com/6regressionanalysisandmodelselection1-200811225017/75/6-1-32-2048.jpg)
![LASSO回帰:優決定系におけるスパース回帰
A = randn(100,10); % ランダム観測行列
x = [0; 0; 1; 0; 0; 0; -1; 0; 0; 0]; % 成分3と成分8のみ非ゼロ(疎)
b = A*x + 2*randn(100,1); % 観測値
% 最小二乗解
xL2 = pinv(A)*b;
% LASSOでの解法
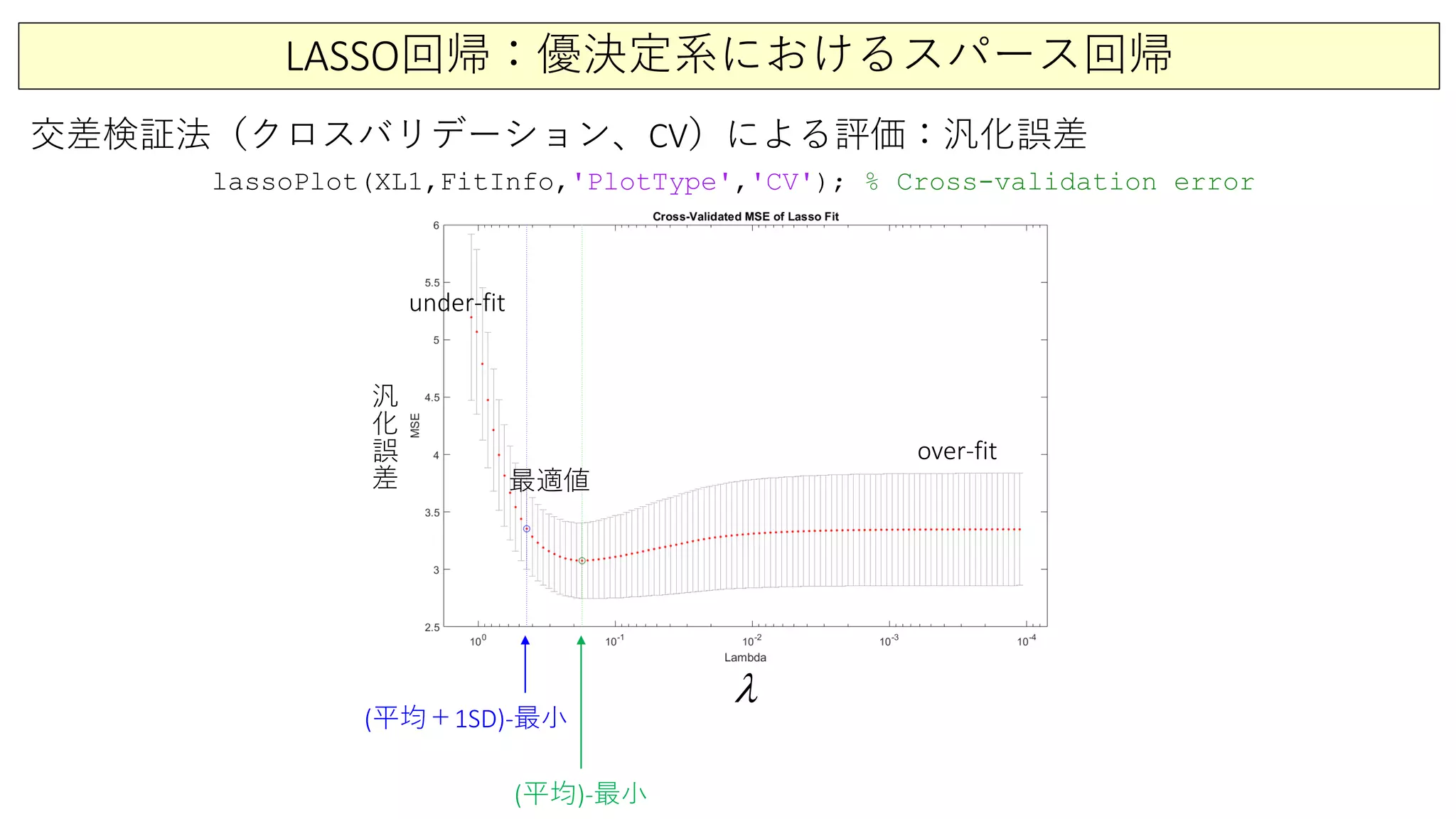
[XL1 FitInfo] = lasso(A,b,'CV',10); % LASSO solver
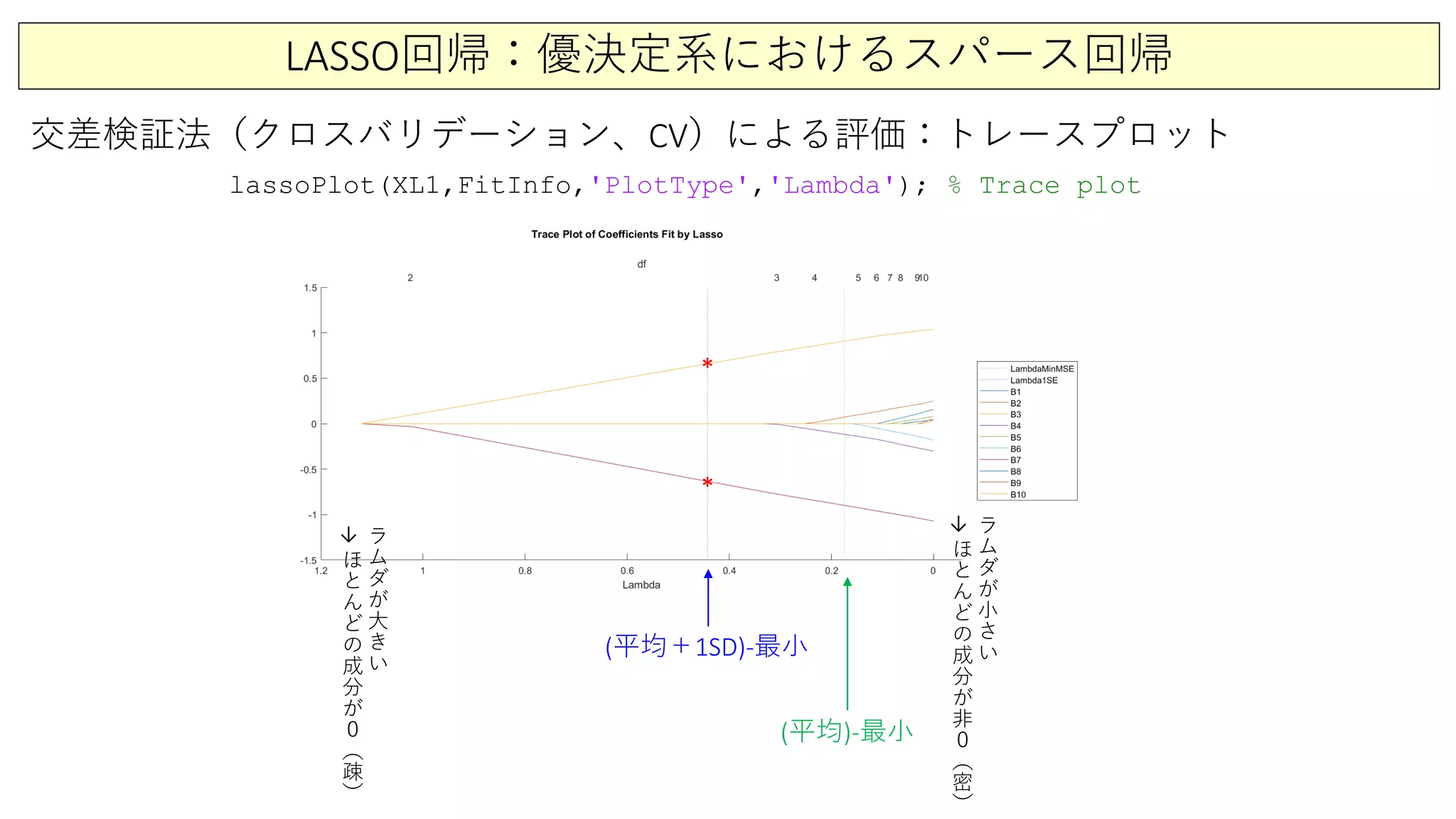
lassoPlot(XL1,FitInfo,‘PlotType’,‘CV’); % 交差検証法による汎化誤差評価
lassoPlot(XL1,FitInfo,‘PlotType’,‘Lambda’); % トレースプロット
xL1 = XL1(:,FitInfo.Index1SE); % 汎化誤差を最小化する最適解
xL1DeBiased = pinv(A(:,abs(xL1)>0))*b;
CH03_SEC05_1_RobustRegression.m
=Ax b
=
2L
+
=x A b
1
2
L 2 1
arg min λ= − +
x
Ax b xx](https://image.slidesharecdn.com/6regressionanalysisandmodelselection1-200811225017/75/6-1-36-2048.jpg)

























![[DL輪読会]Weakly-Supervised Disentanglement Without Compromises](https://cdn.slidesharecdn.com/ss_thumbnails/20200619akuzawa-200630053016-thumbnail.jpg?width=640&height=640&fit=bounds)

































