Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
sleepy_yoshi
PDF, PPTX
2,370 views
PRML復々習レーン#9 6.3-6.3.1
PRML復々習レーン#9 6.3-6.3.1 はっぴょう
Technology
◦
Read more
3
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 17
2
/ 17
3
/ 17
4
/ 17
5
/ 17
6
/ 17
7
/ 17
8
/ 17
9
/ 17
10
/ 17
11
/ 17
12
/ 17
13
/ 17
14
/ 17
15
/ 17
16
/ 17
17
/ 17
More Related Content
PDF
パターン認識と機械学習6章(カーネル法)
by
Yukara Ikemiya
PDF
PRML輪読#7
by
matsuolab
PPTX
PRML第6章「カーネル法」
by
Keisuke Sugawara
PDF
PRML輪読#6
by
matsuolab
PDF
PRML輪読#5
by
matsuolab
PDF
PRML上巻勉強会 at 東京大学 資料 第1章後半
by
Ohsawa Goodfellow
PPTX
PRML Chapter 5
by
Masahito Ohue
PDF
PRML復々習レーン#9 前回までのあらすじ
by
sleepy_yoshi
パターン認識と機械学習6章(カーネル法)
by
Yukara Ikemiya
PRML輪読#7
by
matsuolab
PRML第6章「カーネル法」
by
Keisuke Sugawara
PRML輪読#6
by
matsuolab
PRML輪読#5
by
matsuolab
PRML上巻勉強会 at 東京大学 資料 第1章後半
by
Ohsawa Goodfellow
PRML Chapter 5
by
Masahito Ohue
PRML復々習レーン#9 前回までのあらすじ
by
sleepy_yoshi
What's hot
PDF
PRML 6.1章 カーネル法と双対表現
by
hagino 3000
PDF
はじめてのパターン認識8章サポートベクトルマシン
by
NobuyukiTakayasu
PPTX
PRML 4.4-4.5.2 ラプラス近似
by
KokiTakamiya
PDF
PRML 5.3-5.4
by
正志 坪坂
PDF
PRML chapter7
by
Takahiro (Poly) Horikawa
PPTX
2014.02.20_5章ニューラルネットワーク
by
Takeshi Sakaki
PDF
PRML5
by
Hidekazu Oiwa
PDF
(文献紹介) 画像復元:Plug-and-Play ADMM
by
Morpho, Inc.
PDF
PRML 2.3節 - ガウス分布
by
Yuki Soma
PDF
Graphic Notes on Linear Algebra and Data Science
by
Kenji Hiranabe
PDF
Juliaで並列計算
by
Shintaro Fukushima
PDF
PRML輪読#1
by
matsuolab
PDF
Prml4.4 ラプラス近似~ベイズロジスティック回帰
by
Yuki Matsubara
PDF
PRML 第4章
by
Akira Miyazawa
PDF
Prml 2.3
by
Yuuki Saitoh
PDF
PRML輪読#4
by
matsuolab
PDF
パターン認識と機械学習 §6.2 カーネル関数の構成
by
Prunus 1350
PDF
PRML輪読#11
by
matsuolab
PDF
PRML上巻勉強会 at 東京大学 資料 第4章4.3.1 〜 4.5.2
by
Hiroyuki Kato
PDF
[DL輪読会]Wasserstein GAN/Towards Principled Methods for Training Generative Adv...
by
Deep Learning JP
PRML 6.1章 カーネル法と双対表現
by
hagino 3000
はじめてのパターン認識8章サポートベクトルマシン
by
NobuyukiTakayasu
PRML 4.4-4.5.2 ラプラス近似
by
KokiTakamiya
PRML 5.3-5.4
by
正志 坪坂
PRML chapter7
by
Takahiro (Poly) Horikawa
2014.02.20_5章ニューラルネットワーク
by
Takeshi Sakaki
PRML5
by
Hidekazu Oiwa
(文献紹介) 画像復元:Plug-and-Play ADMM
by
Morpho, Inc.
PRML 2.3節 - ガウス分布
by
Yuki Soma
Graphic Notes on Linear Algebra and Data Science
by
Kenji Hiranabe
Juliaで並列計算
by
Shintaro Fukushima
PRML輪読#1
by
matsuolab
Prml4.4 ラプラス近似~ベイズロジスティック回帰
by
Yuki Matsubara
PRML 第4章
by
Akira Miyazawa
Prml 2.3
by
Yuuki Saitoh
PRML輪読#4
by
matsuolab
パターン認識と機械学習 §6.2 カーネル関数の構成
by
Prunus 1350
PRML輪読#11
by
matsuolab
PRML上巻勉強会 at 東京大学 資料 第4章4.3.1 〜 4.5.2
by
Hiroyuki Kato
[DL輪読会]Wasserstein GAN/Towards Principled Methods for Training Generative Adv...
by
Deep Learning JP
Similar to PRML復々習レーン#9 6.3-6.3.1
PDF
PRML復々習レーン#7 前回までのあらすじ
by
sleepy_yoshi
PDF
Prml sec6
by
Keisuke OTAKI
ZIP
今さら聞けないカーネル法とサポートベクターマシン
by
Shinya Shimizu
PPTX
W8PRML5.1-5.3
by
Masahito Ohue
PDF
2013.12.26 prml勉強会 線形回帰モデル3.2~3.4
by
Takeshi Sakaki
PPTX
Prml 1.3~1.6 ver3
by
Toshihiko Iio
PDF
PRML復々習レーン#3 3.1.3-3.1.5
by
sleepy_yoshi
PDF
PRML10-draft1002
by
Toshiyuki Shimono
PDF
東京都市大学 データ解析入門 6 回帰分析とモデル選択 1
by
hirokazutanaka
PDF
PRML 10.4 - 10.6
by
Akira Miyazawa
PDF
Re revenge chap03-1
by
裕樹 奥田
PDF
東京都市大学 データ解析入門 7 回帰分析とモデル選択 2
by
hirokazutanaka
PDF
Infomation geometry(overview)
by
Yoshitake Misaki
PDF
PRML2.1 2.2
by
Takuto Kimura
PDF
Prml2.1 2.2,2.4-2.5
by
Takuto Kimura
PDF
Prml07
by
Tsukasa Fukunaga
PDF
PRML復々習レーン#3 前回までのあらすじ
by
sleepy_yoshi
PDF
統計概論 isseing333
by
Issei Kurahashi
PDF
PRML chap.10 latter half
by
Narihira Takuya
PDF
TokyoWebmining統計学部 第1回
by
Issei Kurahashi
PRML復々習レーン#7 前回までのあらすじ
by
sleepy_yoshi
Prml sec6
by
Keisuke OTAKI
今さら聞けないカーネル法とサポートベクターマシン
by
Shinya Shimizu
W8PRML5.1-5.3
by
Masahito Ohue
2013.12.26 prml勉強会 線形回帰モデル3.2~3.4
by
Takeshi Sakaki
Prml 1.3~1.6 ver3
by
Toshihiko Iio
PRML復々習レーン#3 3.1.3-3.1.5
by
sleepy_yoshi
PRML10-draft1002
by
Toshiyuki Shimono
東京都市大学 データ解析入門 6 回帰分析とモデル選択 1
by
hirokazutanaka
PRML 10.4 - 10.6
by
Akira Miyazawa
Re revenge chap03-1
by
裕樹 奥田
東京都市大学 データ解析入門 7 回帰分析とモデル選択 2
by
hirokazutanaka
Infomation geometry(overview)
by
Yoshitake Misaki
PRML2.1 2.2
by
Takuto Kimura
Prml2.1 2.2,2.4-2.5
by
Takuto Kimura
Prml07
by
Tsukasa Fukunaga
PRML復々習レーン#3 前回までのあらすじ
by
sleepy_yoshi
統計概論 isseing333
by
Issei Kurahashi
PRML chap.10 latter half
by
Narihira Takuya
TokyoWebmining統計学部 第1回
by
Issei Kurahashi
More from sleepy_yoshi
PDF
KDD2014勉強会: Large-Scale High-Precision Topic Modeling on Twitter
by
sleepy_yoshi
PDF
KDD2013読み会: Direct Optimization of Ranking Measures
by
sleepy_yoshi
PDF
PRML復々習レーン#15 前回までのあらすじ
by
sleepy_yoshi
PDF
PRML復々習レーン#14 前回までのあらすじ
by
sleepy_yoshi
PDF
PRML復々習レーン#13 前回までのあらすじ
by
sleepy_yoshi
PDF
PRML復々習レーン#12 前回までのあらすじ
by
sleepy_yoshi
PDF
ICML2013読み会: Distributed training of Large-scale Logistic models
by
sleepy_yoshi
PDF
SEXI2013読み会: Adult Query Classification for Web Search and Recommendation
by
sleepy_yoshi
PDF
計算論的学習理論入門 -PAC学習とかVC次元とか-
by
sleepy_yoshi
PDF
PRML復々習レーン#11 前回までのあらすじ
by
sleepy_yoshi
PDF
SMO徹底入門 - SVMをちゃんと実装する
by
sleepy_yoshi
PDF
PRML復々習レーン#10 前回までのあらすじ
by
sleepy_yoshi
PDF
PRML復々習レーン#10 7.1.3-7.1.5
by
sleepy_yoshi
PDF
SIGIR2012勉強会 23 Learning to Rank
by
sleepy_yoshi
PDF
DSIRNLP#3 LT: 辞書挟み込み型転置インデクスFIg4.5
by
sleepy_yoshi
PDF
ICML2012読み会 Scaling Up Coordinate Descent Algorithms for Large L1 regularizat...
by
sleepy_yoshi
PDF
SVM実践ガイド (A Practical Guide to Support Vector Classification)
by
sleepy_yoshi
PDF
PRML復々習レーン#2 2.3.6 - 2.3.7
by
sleepy_yoshi
PDF
WSDM2012読み会: Learning to Rank with Multi-Aspect Relevance for Vertical Search
by
sleepy_yoshi
PDF
Collaborative Ranking: A Case Study on Entity Ranking (EMNLP2011読み会)
by
sleepy_yoshi
KDD2014勉強会: Large-Scale High-Precision Topic Modeling on Twitter
by
sleepy_yoshi
KDD2013読み会: Direct Optimization of Ranking Measures
by
sleepy_yoshi
PRML復々習レーン#15 前回までのあらすじ
by
sleepy_yoshi
PRML復々習レーン#14 前回までのあらすじ
by
sleepy_yoshi
PRML復々習レーン#13 前回までのあらすじ
by
sleepy_yoshi
PRML復々習レーン#12 前回までのあらすじ
by
sleepy_yoshi
ICML2013読み会: Distributed training of Large-scale Logistic models
by
sleepy_yoshi
SEXI2013読み会: Adult Query Classification for Web Search and Recommendation
by
sleepy_yoshi
計算論的学習理論入門 -PAC学習とかVC次元とか-
by
sleepy_yoshi
PRML復々習レーン#11 前回までのあらすじ
by
sleepy_yoshi
SMO徹底入門 - SVMをちゃんと実装する
by
sleepy_yoshi
PRML復々習レーン#10 前回までのあらすじ
by
sleepy_yoshi
PRML復々習レーン#10 7.1.3-7.1.5
by
sleepy_yoshi
SIGIR2012勉強会 23 Learning to Rank
by
sleepy_yoshi
DSIRNLP#3 LT: 辞書挟み込み型転置インデクスFIg4.5
by
sleepy_yoshi
ICML2012読み会 Scaling Up Coordinate Descent Algorithms for Large L1 regularizat...
by
sleepy_yoshi
SVM実践ガイド (A Practical Guide to Support Vector Classification)
by
sleepy_yoshi
PRML復々習レーン#2 2.3.6 - 2.3.7
by
sleepy_yoshi
WSDM2012読み会: Learning to Rank with Multi-Aspect Relevance for Vertical Search
by
sleepy_yoshi
Collaborative Ranking: A Case Study on Entity Ranking (EMNLP2011読み会)
by
sleepy_yoshi
Recently uploaded
PDF
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #2
by
Tasuku Takahashi
PDF
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #1
by
Tasuku Takahashi
PPTX
楽々ナレッジベース「楽ナレ」3種比較 - Dify / AWS S3 Vector / Google File Search Tool
by
Kiyohide Yamaguchi
PDF
エンジニアが選ぶべきAIエディタ & Antigravity 活用例@ウェビナー「触ってみてどうだった?Google Antigravity 既存IDEと...
by
NorihiroSunada
PDF
流行りに乗っかるClaris FileMaker 〜AI関連機能の紹介〜 by 合同会社イボルブ
by
Evolve LLC.
PDF
20251210_MultiDevinForEnterprise on Devin 1st Anniv Meetup
by
Masaki Yamakawa
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #2
by
Tasuku Takahashi
Machine Tests Benchmark Suite. Explain github.com/alexziskind1/machine_tests #1
by
Tasuku Takahashi
楽々ナレッジベース「楽ナレ」3種比較 - Dify / AWS S3 Vector / Google File Search Tool
by
Kiyohide Yamaguchi
エンジニアが選ぶべきAIエディタ & Antigravity 活用例@ウェビナー「触ってみてどうだった?Google Antigravity 既存IDEと...
by
NorihiroSunada
流行りに乗っかるClaris FileMaker 〜AI関連機能の紹介〜 by 合同会社イボルブ
by
Evolve LLC.
20251210_MultiDevinForEnterprise on Devin 1st Anniv Meetup
by
Masaki Yamakawa
PRML復々習レーン#9 6.3-6.3.1
1.
PRML復々習レーン#9
6.3 RBFネットワーク 6.3.1 Nadaraya-Watson モデル 2013-03-10 Yoshihiko Suhara @sleepy_yoshi 1
2.
もくじ • 6.3 RBFネットワーク
– 6.3.1 Nadaraya-Watson モデル 2
3.
復習の復習 3.6 固定された基底関数の限界
ポイントだよ 基底関数をたくさん用意すれば線形モデルでいいじゃん ⇒ NO!ソンナコトハナイ! • 訓練データを観測する前に基底関数𝜙 ⋅ を決定する必要 がある • 入力空間の次元数に対して指数的に基底関数を増やして いく必要性 • ただし – データベクトルは本質的な次元数が入力次元数よりも小さい非線形 多様体に大体分布しているという性質がある – うまいこと基底関数を選べればよい (NN@5章) or 基底関数を明示的 に選ばない方法を用いられればよいのでは? (カーネル法@6章, 7章) 3
4.
6.3 RBFネットワーク
4
5.
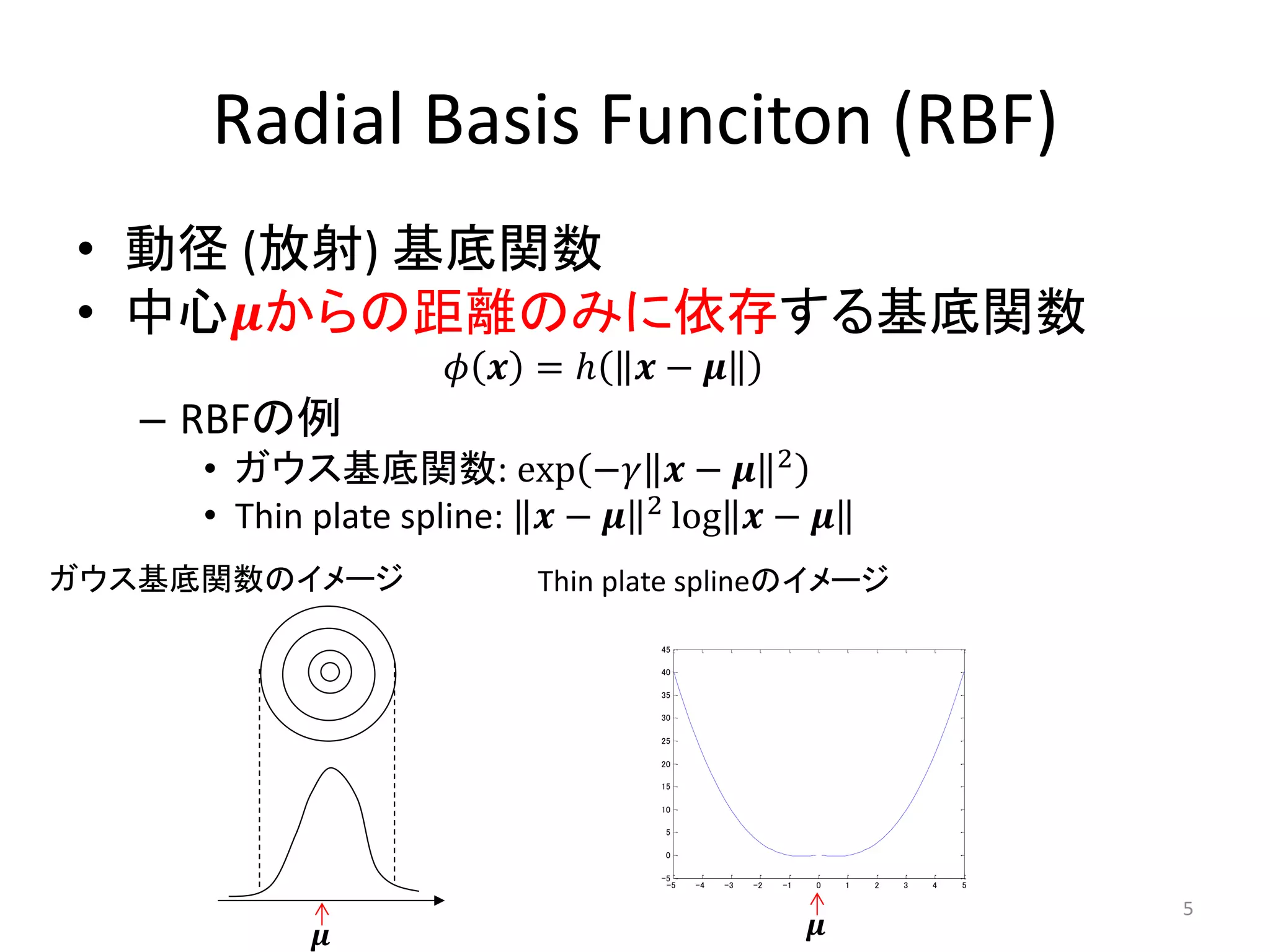
Radial Basis Funciton
(RBF) • 動径 (放射) 基底関数 • 中心𝝁からの距離のみに依存する基底関数 𝜙 𝒙 =ℎ 𝒙− 𝝁 – RBFの例 • ガウス基底関数: exp −𝛾 𝒙 − 𝝁 2 • Thin plate spline: 𝒙 − 𝝁 2 log 𝒙 − 𝝁 ガウス基底関数のイメージ Thin plate splineのイメージ 45 40 35 30 25 20 15 10 5 0 -5 -5 -4 -3 -2 -1 0 1 2 3 4 5 5 𝝁 𝝁
6.
RBFはなんでもよい? • [Chen+ 91]
から抜粋 6
7.
RBFによる関数補間 • RBFが初めて使われたのは関数補間
– 関数補間:目的変数の値を正確に再現する関数を 求める問題 – 各データ点を中心においたRBFの線形結合で実現 𝑁 𝑓 𝑥 = 𝑤𝑛 ℎ 𝒙− 𝒙𝑛 𝑛=1 • 重みは最小二乗法によって求める – 参考: (3.15)式 𝒘 𝑀𝐿 = 𝚽 𝑇 𝚽 −1 𝚽 𝑇 𝒕 7
8.
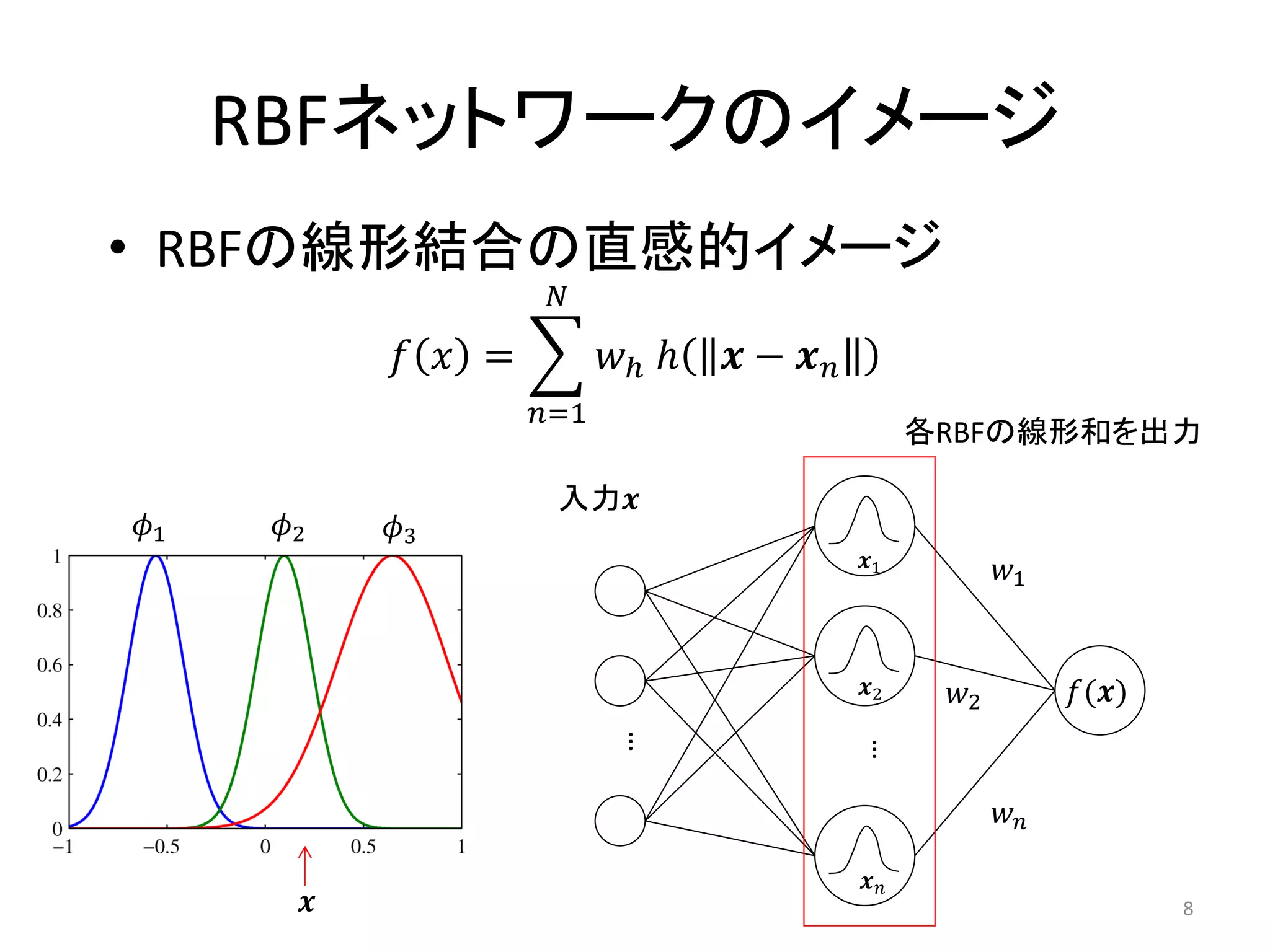
RBFネットワークのイメージ • RBFの線形結合の直感的イメージ
𝑁 𝑓 𝑥 = 𝑤ℎ ℎ 𝒙− 𝒙𝑛 𝑛=1 各RBFの線形和を出力 入力𝒙 𝜙1 𝜙2 𝜙3 𝒙1 𝑤1 𝒙2 𝑤2 𝑓(𝒙) … … 𝑤𝑛 𝒙𝑛 𝒙 8
9.
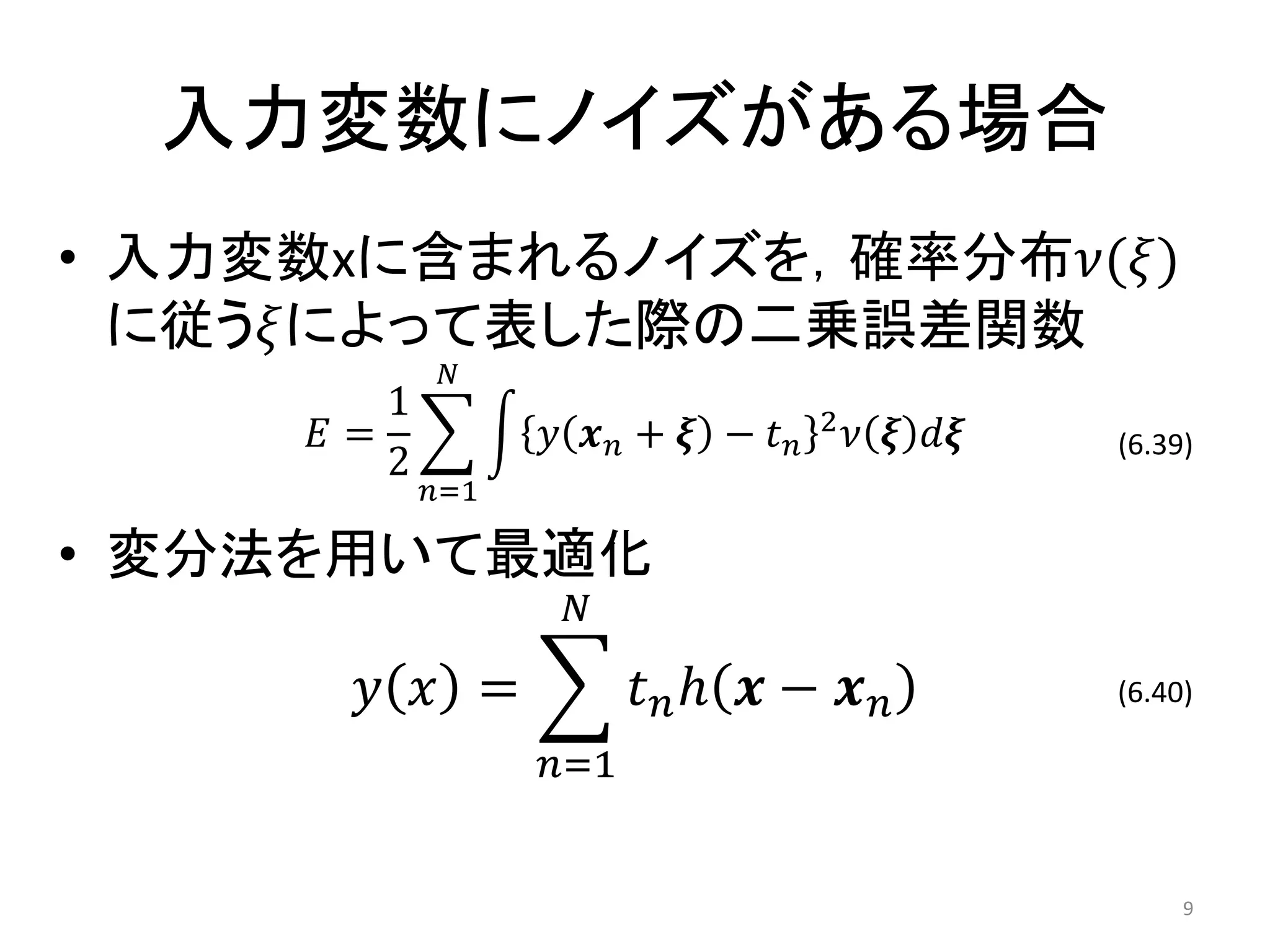
入力変数にノイズがある場合 • 入力変数xに含まれるノイズを,確率分布𝜈(𝜉)
に従う𝜉によって表した際の二乗誤差関数 𝑁 1 2 𝐸= 𝑦 𝒙𝑛+ 𝝃 − 𝑡𝑛 𝜈 𝝃 𝑑𝝃 (6.39) 2 𝑛=1 • 変分法を用いて最適化 𝑁 𝑦 𝑥 = 𝑡 𝑛ℎ 𝒙 − 𝒙 𝑛 (6.40) 𝑛=1 9
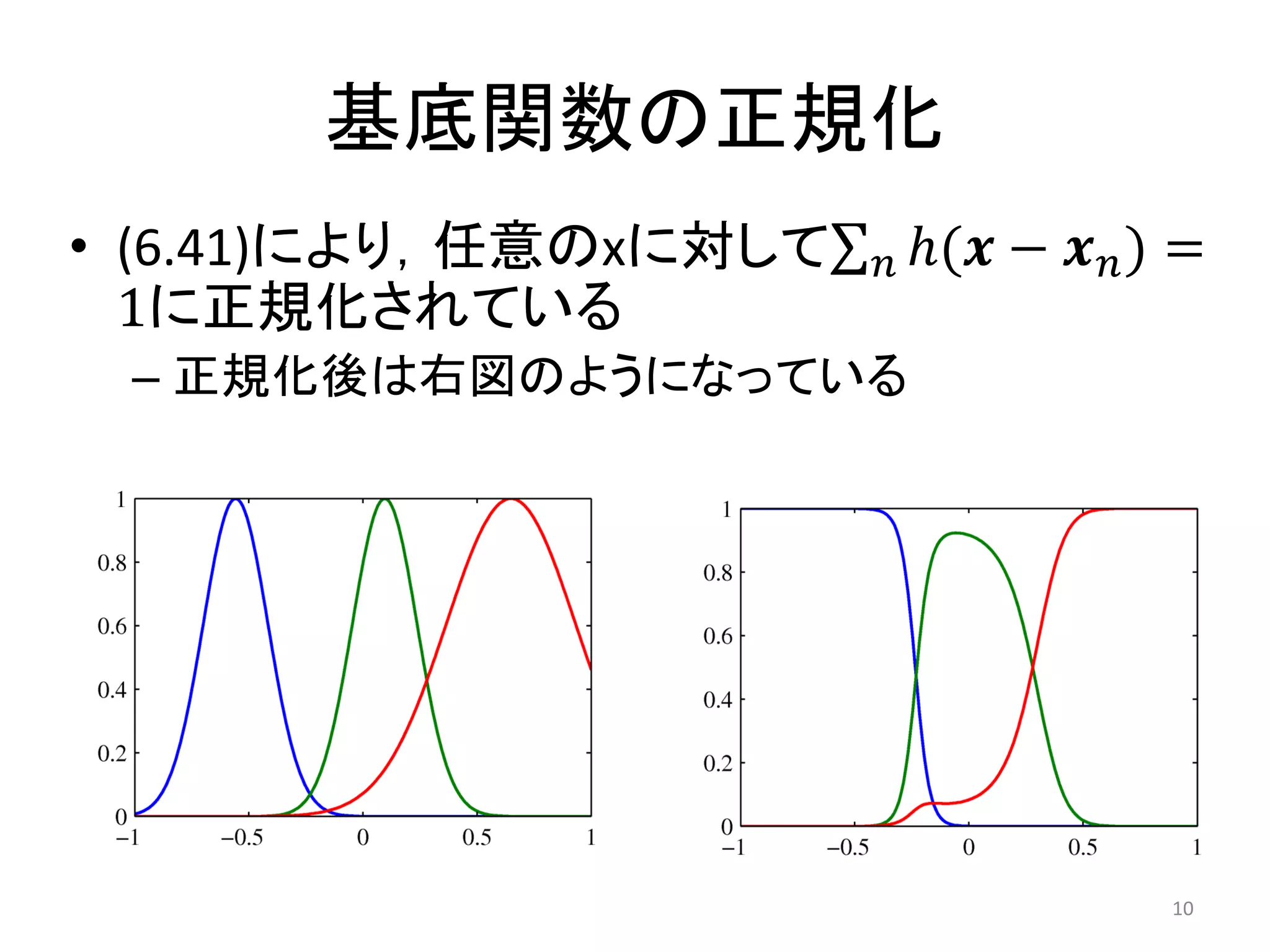
10.
基底関数の正規化 • (6.41)により,任意のxに対して
𝑛 ℎ(𝒙 − 𝒙 𝑛) = 1に正規化されている – 正規化後は右図のようになっている 10
11.
計算コストの削減 • 各データ点に基底関数が用意されているた
め,入力データに対して特徴次元数×基底 関数の数だけ計算コストがかかる • 計算コストの削減するために基底関数を絞 り込むことを考える – データ点の部分集合をランダムに選択 – 直交最小二乗法 [Chen+ 91] – k-Means? 11
12.
6.3.1 Nadaraya-Watsonモデル
別名: カーネル回帰モデル 12
13.
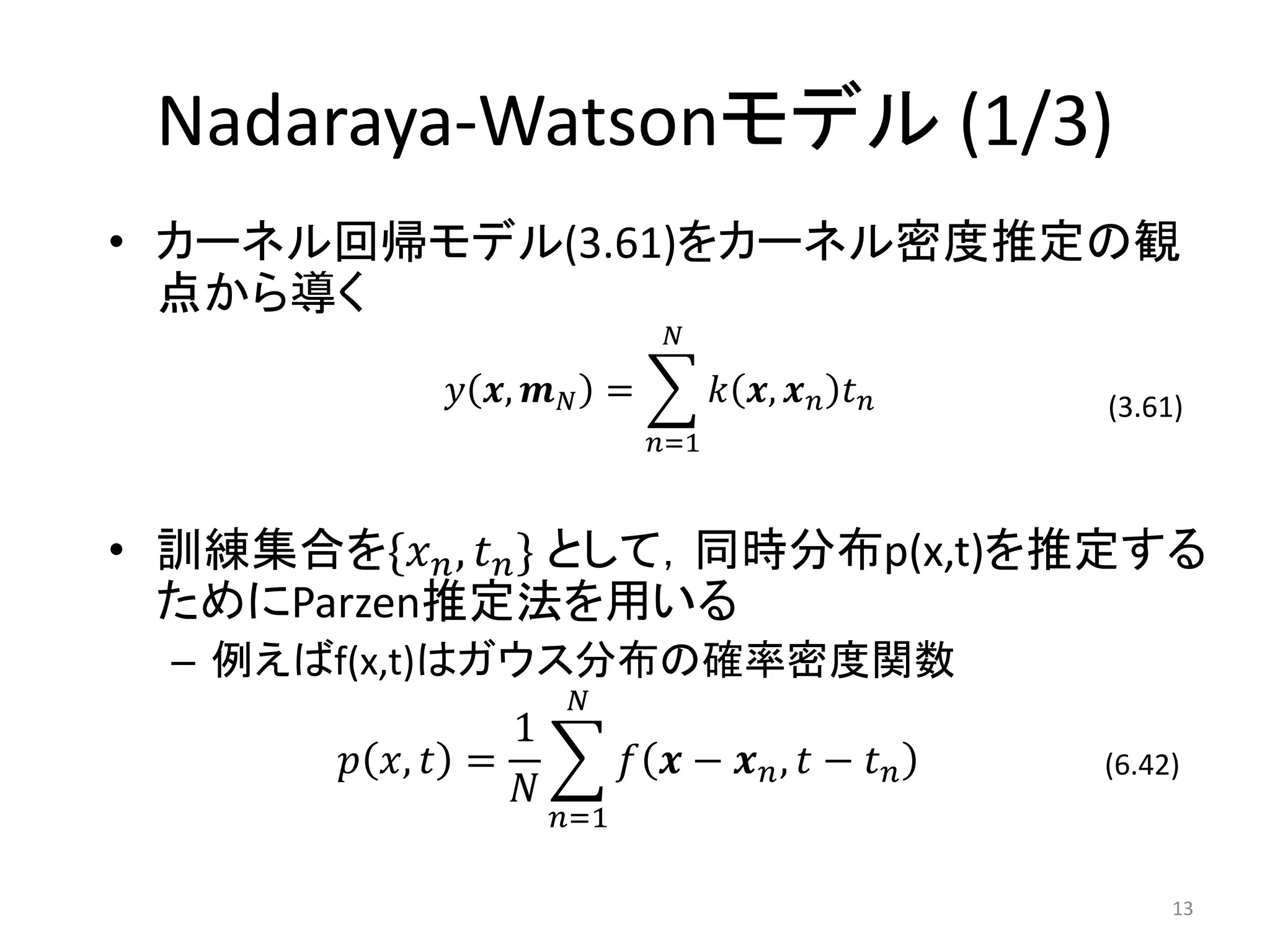
Nadaraya-Watsonモデル (1/3) • カーネル回帰モデル(3.61)をカーネル密度推定の観
点から導く 𝑁 𝑦 𝒙, 𝒎 𝑁 = 𝑘 𝒙, 𝒙 𝑛 𝑡 𝑛 (3.61) 𝑛=1 • 訓練集合を{𝑥 𝑛 , 𝑡 𝑛 } として,同時分布p(x,t)を推定する ためにParzen推定法を用いる – 例えばf(x,t)はガウス分布の確率密度関数 𝑁 1 𝑝 𝑥, 𝑡 = 𝑓 𝒙 − 𝒙 𝑛, 𝑡 − 𝑡 𝑛 (6.42) 𝑁 𝑛=1 13
14.
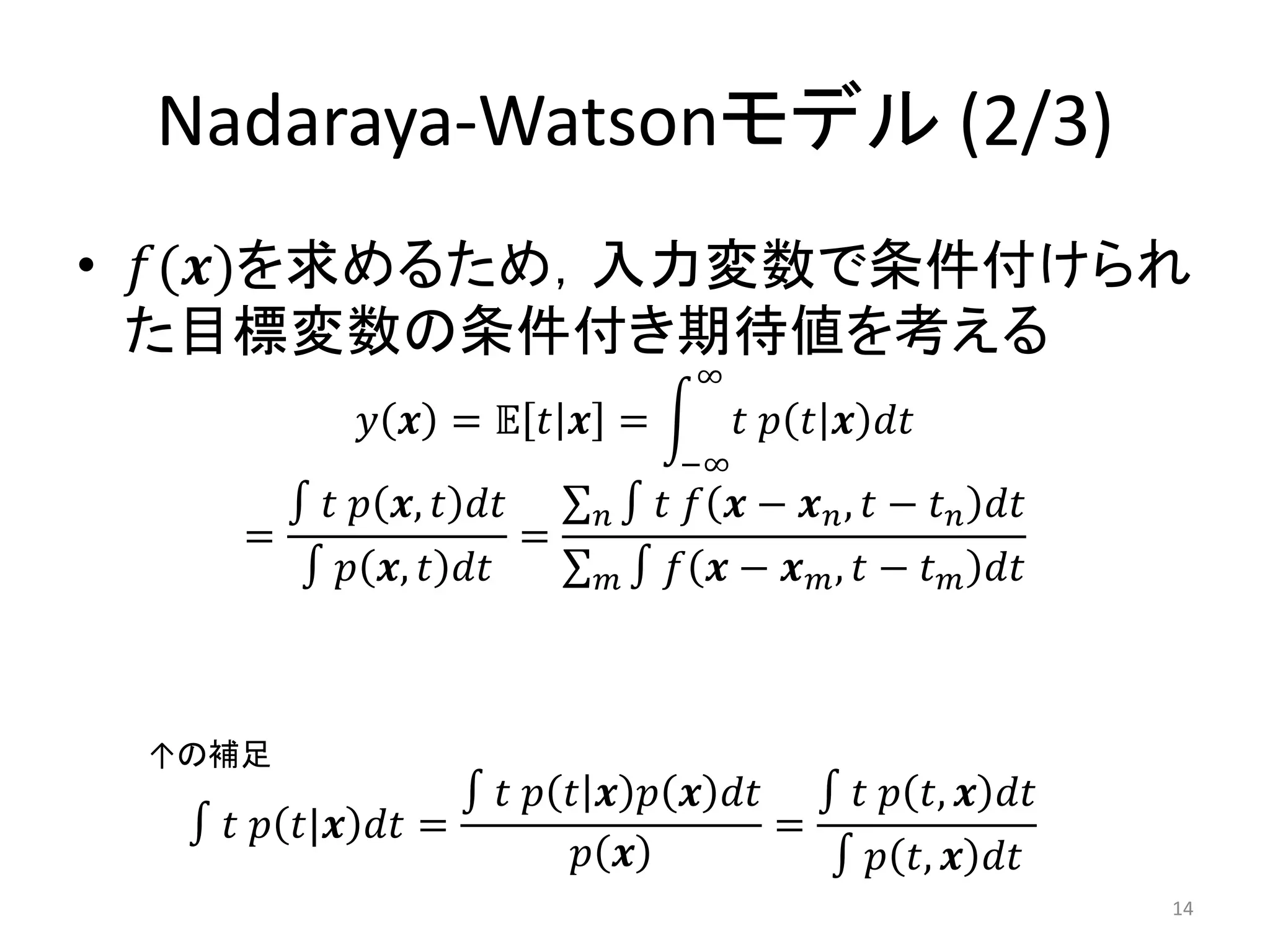
Nadaraya-Watsonモデル (2/3) • 𝑓(𝒙)を求めるため,入力変数で条件付けられ
た目標変数の条件付き期待値を考える ∞ 𝑦 𝒙 = 𝔼 𝑡 𝒙 = 𝑡 𝑝 𝑡 𝒙 𝑑𝑡 −∞ ∫ 𝑡 𝑝 𝒙, 𝑡 𝑑𝑡 𝑛∫ 𝑡 𝑓 𝒙 − 𝒙 𝑛 , 𝑡 − 𝑡 𝑛 𝑑𝑡 = = ∫ 𝑝 𝒙, 𝑡 𝑑𝑡 𝑚∫ 𝑓 𝒙 − 𝒙 𝑚, 𝑡 − 𝑡 𝑚 𝑑𝑡 ↑の補足 ∫ 𝑡 𝑝 𝑡 𝒙 𝑝 𝒙 𝑑𝑡 ∫ 𝑡 𝑝 𝑡, 𝒙 𝑑𝑡 ∫ 𝑡 𝑝 𝑡|𝒙 𝑑𝑡 = = 𝑝 𝒙 ∫ 𝑝 𝑡, 𝒙 𝑑𝑡 14
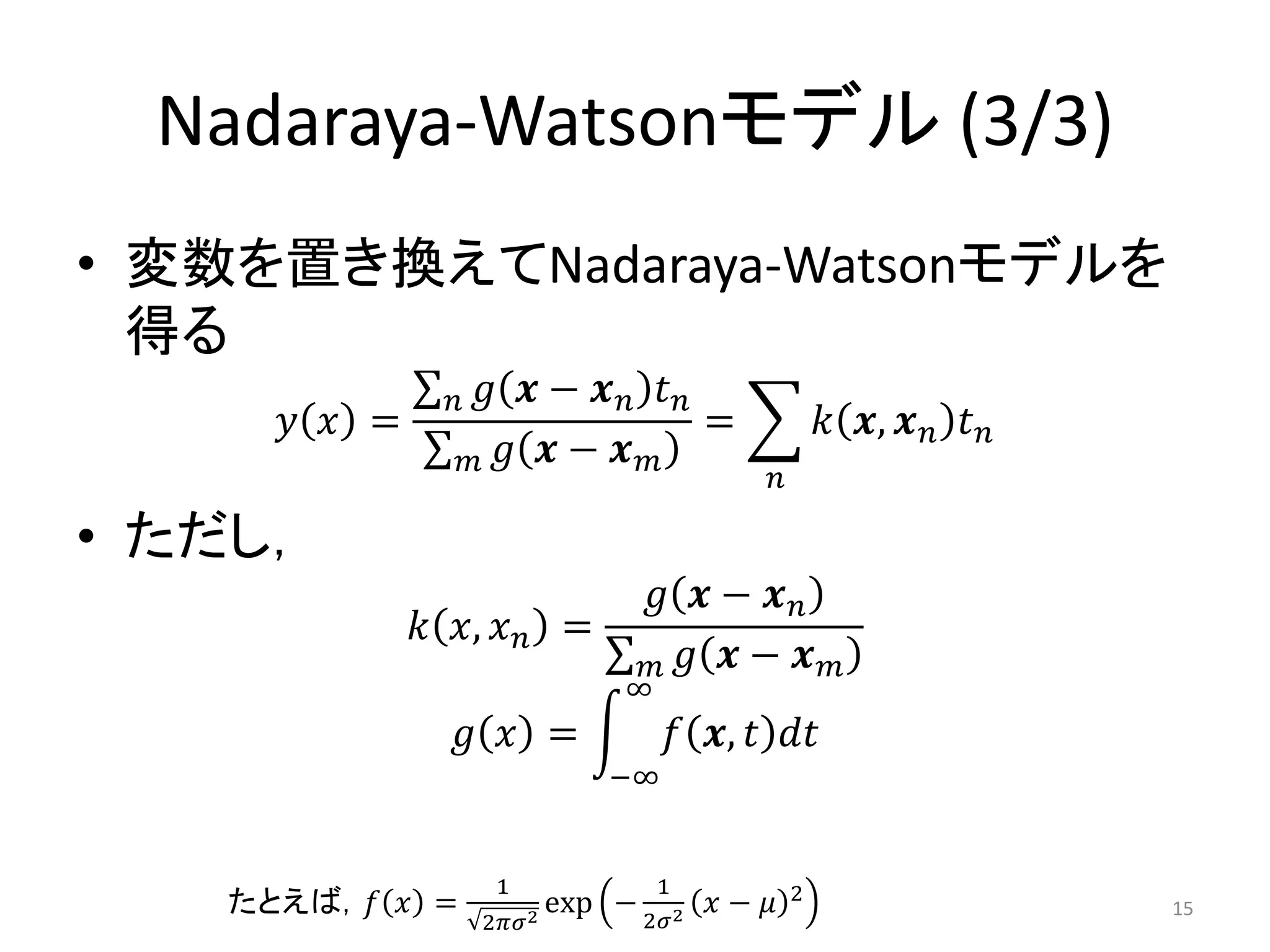
15.
Nadaraya-Watsonモデル (3/3) • 変数を置き換えてNadaraya-Watsonモデルを
得る 𝑛 𝑔 𝒙− 𝒙𝑛 𝑡𝑛 𝑦 𝑥 = = 𝑘 𝒙, 𝒙 𝑛 𝑡 𝑛 𝑚 𝑔 𝒙− 𝒙 𝑚 𝑛 • ただし, 𝑔 𝒙− 𝒙𝑛 𝑘 𝑥, 𝑥 𝑛 = 𝑚 𝑔 𝒙− 𝒙 𝑚 ∞ 𝑔 𝑥 = 𝑓 𝒙, 𝑡 𝑑𝑡 −∞ 1 1 2 たとえば,𝑓 𝑥 = 2 exp − 2𝜎2 𝑥 − 𝜇 15 2𝜋𝜎
16.
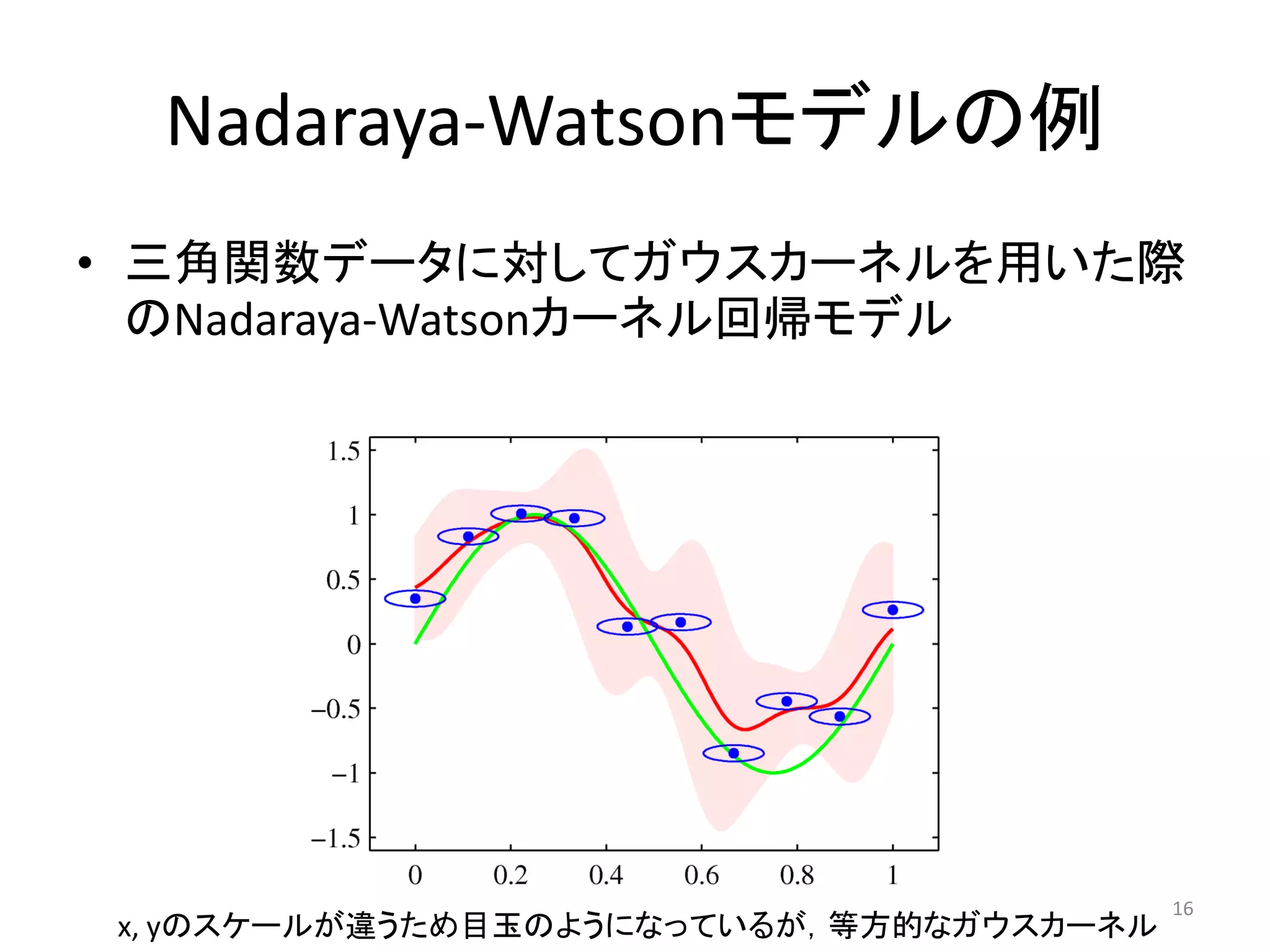
Nadaraya-Watsonモデルの例 • 三角関数データに対してガウスカーネルを用いた際
のNadaraya-Watsonカーネル回帰モデル 16 x, yのスケールが違うため目玉のようになっているが,等方的なガウスカーネル
17.
おわり
17
Download
![RBFはなんでもよい?
• [Chen+ 91] から抜粋
6](https://image.slidesharecdn.com/20130310prmlrerevenge63-6-3-1suharapublish-130310085546-phpapp02/75/PRML-9-6-3-6-3-1-6-2048.jpg)
![計算コストの削減
• 各データ点に基底関数が用意されているた
め,入力データに対して特徴次元数×基底
関数の数だけ計算コストがかかる
• 計算コストの削減するために基底関数を絞
り込むことを考える
– データ点の部分集合をランダムに選択
– 直交最小二乗法 [Chen+ 91]
– k-Means?
11](https://image.slidesharecdn.com/20130310prmlrerevenge63-6-3-1suharapublish-130310085546-phpapp02/75/PRML-9-6-3-6-3-1-11-2048.jpg)



























![[DL輪読会]Wasserstein GAN/Towards Principled Methods for Training Generative Adv...](https://cdn.slidesharecdn.com/ss_thumbnails/wgan-1-170224021826-thumbnail.jpg?width=640&height=640&fit=bounds)













































