Downloaded 471 times
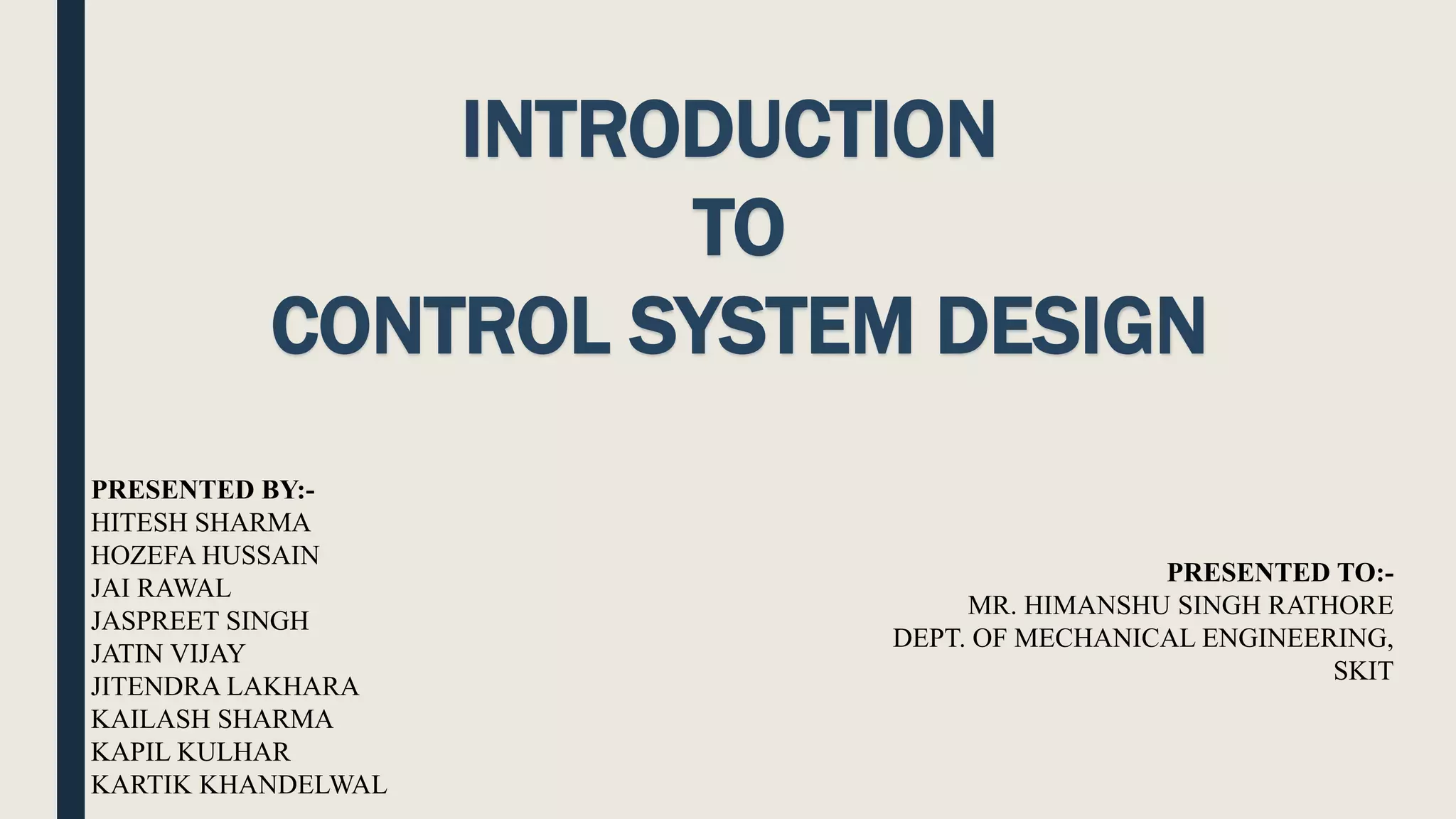

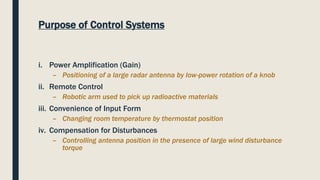
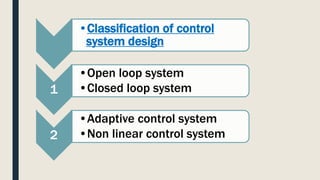
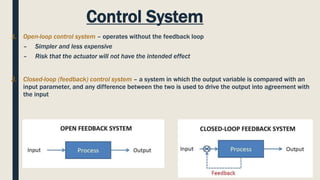
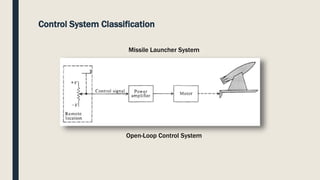
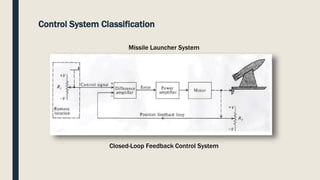
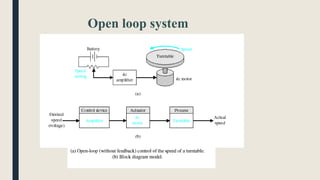
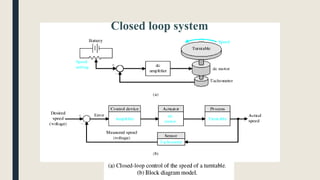
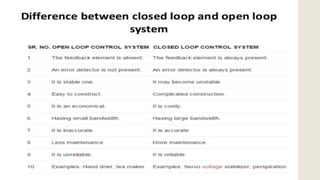
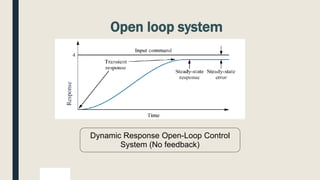
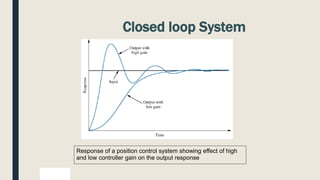
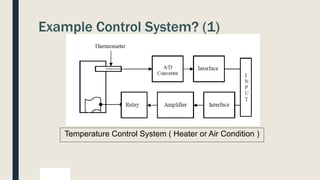
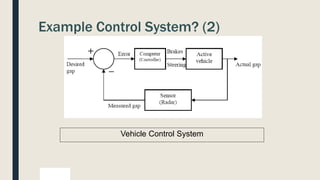
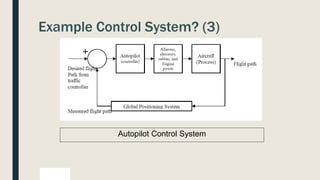

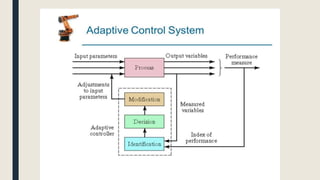
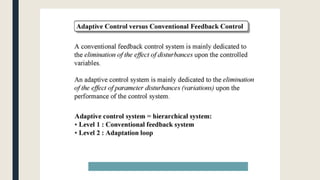
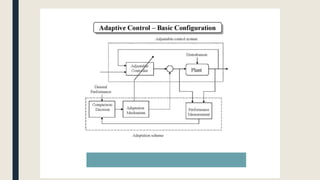
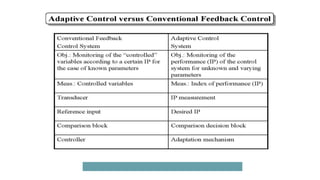

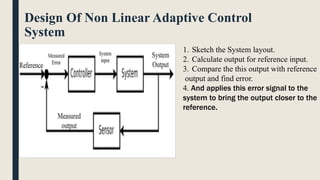

The document provides an introduction to control system design. It discusses that a control system manages the behavior of devices through feedback loops. The summary discusses the main types of control system designs: 1. Open loop and closed loop systems, with closed loop using feedback to regulate outputs based on inputs. 2. Adaptive control systems that can adapt to uncertain or changing parameters. 3. Nonlinear control systems that can handle systems with nonlinear characteristics. The document outlines common control system components like inputs, outputs, and processing devices. It also provides examples of control systems for applications like temperature control and vehicle cruise control.




































































![[Deck] What's New in Spark-Iceberg Integration via DSV2.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/deckwhatsnewinspark-icebergintegrationviadsv2-260210005337-25955b12-thumbnail.jpg?width=640&height=640&fit=bounds)











