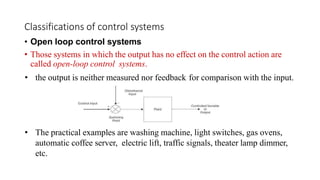
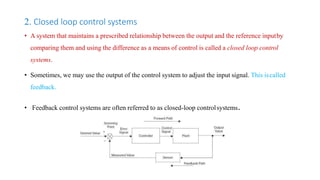
The document discusses control system modeling, defining control systems as devices managing or regulating other systems to achieve desired results. It distinguishes between open-loop and closed-loop control systems, outlining their characteristics, advantages, and disadvantages. Additionally, it introduces linearity and the superposition principle in relation to control systems, emphasizing the importance of accuracy and feedback in closed-loop systems.