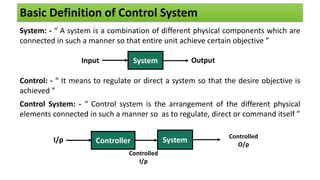
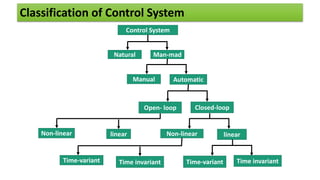
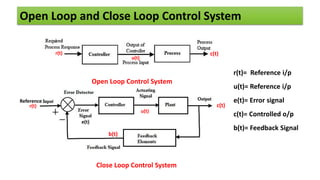
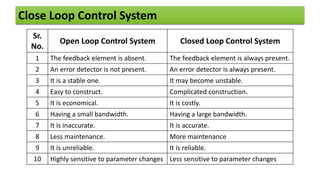
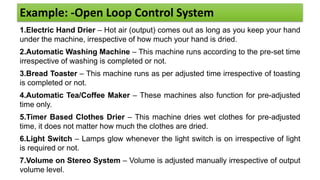
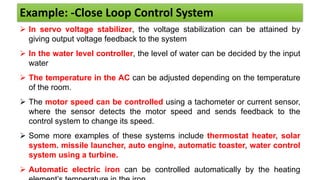
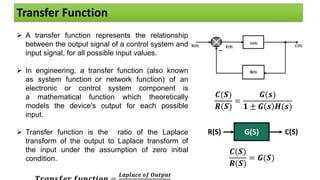
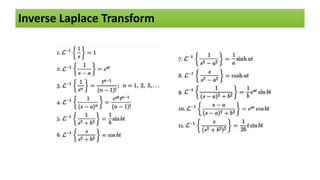
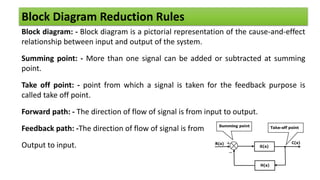
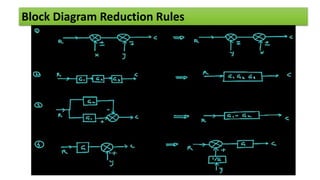
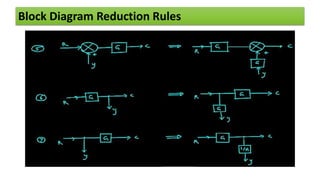
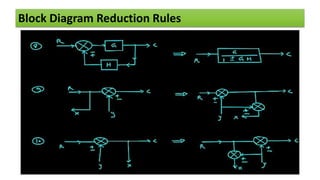
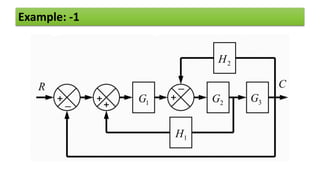
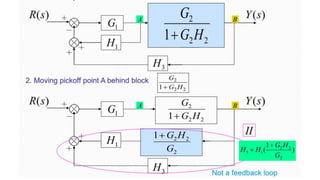
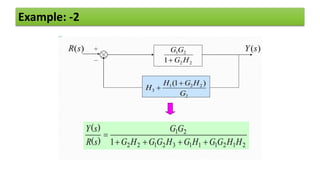
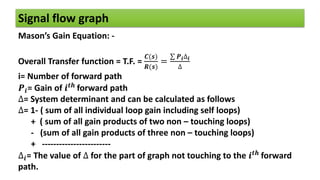
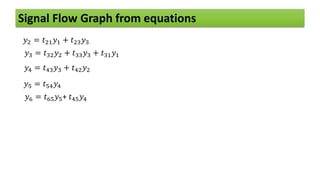
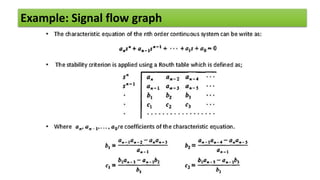
This document discusses control systems and provides definitions and classifications of control systems. It defines a control system as an arrangement of physical elements connected to regulate, direct or command itself. Control systems are classified as natural or man-made, manual or automatic, open-loop or closed-loop, linear or non-linear. The key difference between open-loop and closed-loop systems is that closed-loop systems have feedback which makes them more accurate, reliable and less sensitive to parameter changes compared to open-loop systems. Examples of both open-loop and closed-loop systems are provided. The document also discusses transfer functions, Laplace transforms, block diagram reduction rules, and signal flow graphs.