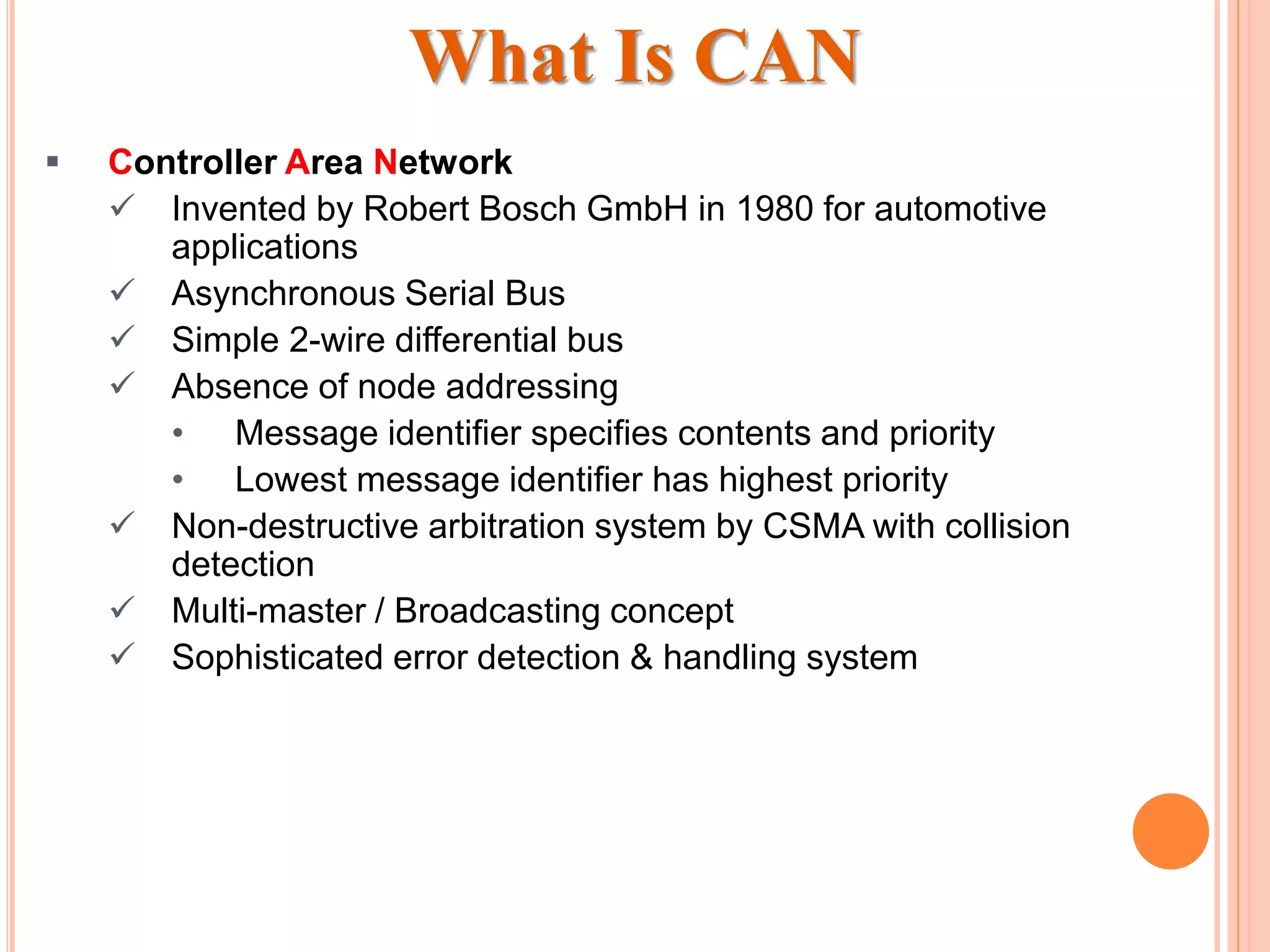
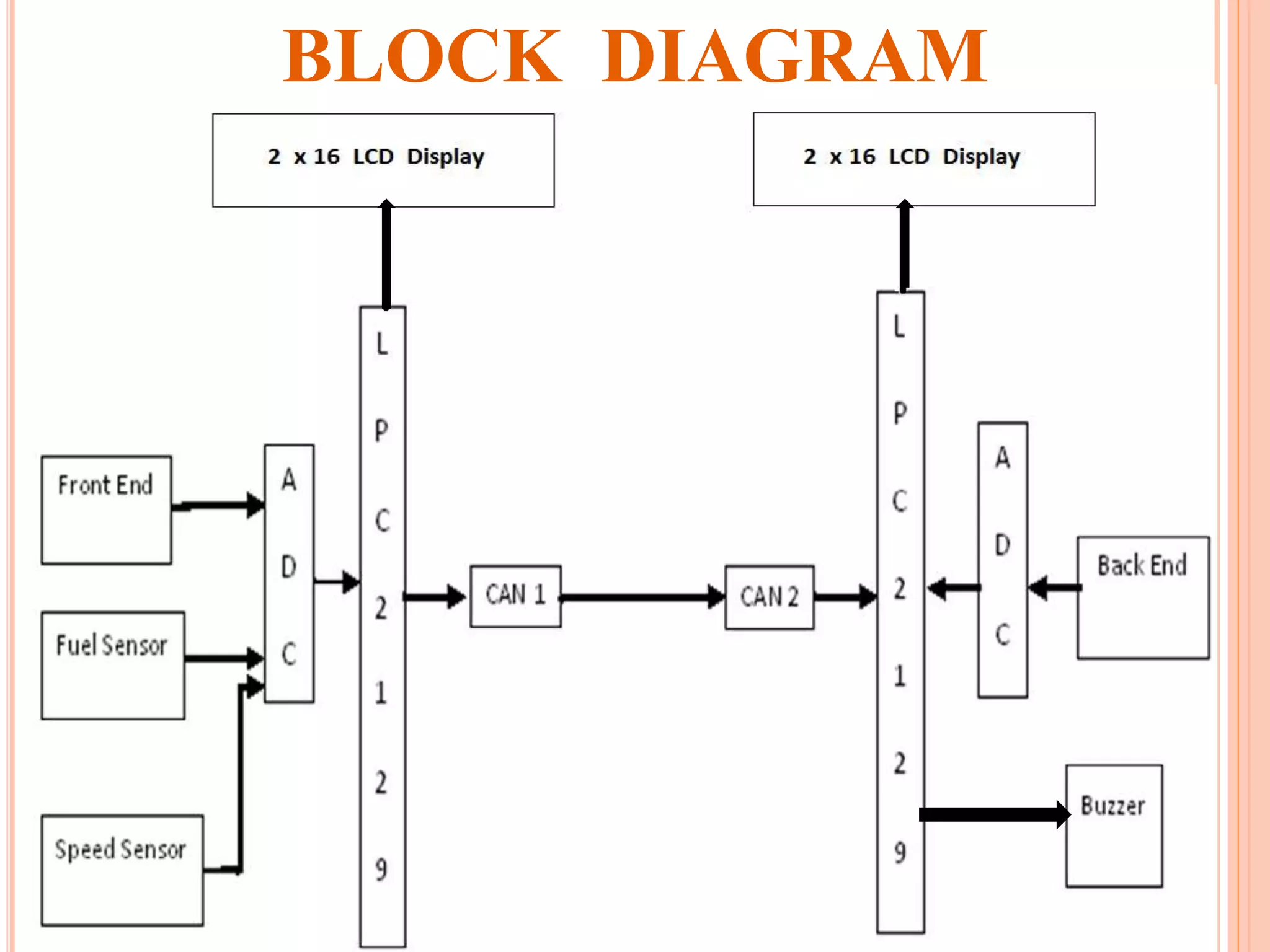
This document summarizes a project presentation on a CAN-based accident avoidance system. The system uses an LPC2129 microcontroller connected to ultrasonic sensors via a CAN bus to detect objects and prevent collisions. It has front-end and rear-end subsystems to monitor the vehicle's surroundings. The presentation covers the components used, software, features of the microcontroller and ultrasonic sensors, how CAN improves on earlier systems, and applications for this type of accident avoidance technology.








































![Smart accident detector and intimator [autosaved]](https://cdn.slidesharecdn.com/ss_thumbnails/smartaccidentdetectorandintimatorautosaved-180331150920-thumbnail.jpg?width=640&height=640&fit=bounds)






















![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)









