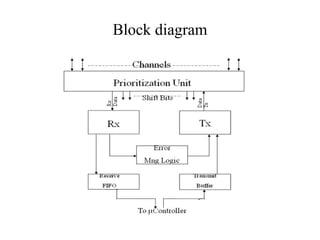
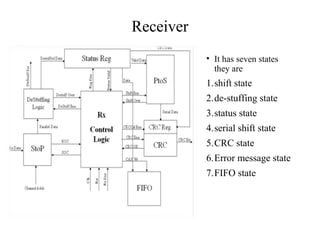
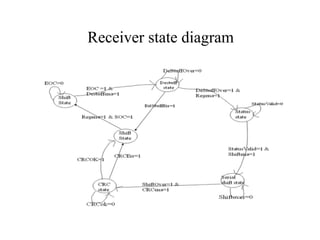
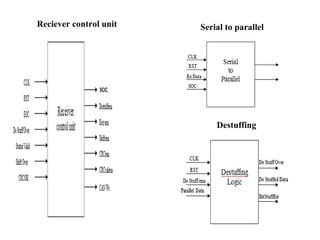
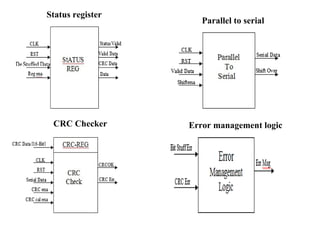
The document details the design and implementation of the Controller Area Network (CAN) protocol, highlighting its features, architecture, and applications. It describes the history of CAN, its operational principles, block diagrams of transmitter and receiver states, and the necessary software and hardware for development. The CAN protocol, primarily used in automotive electronics, is characterized by its low-cost, lightweight networking capabilities and successful implementation through behavioral modeling in VHDL.