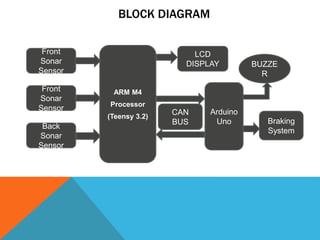
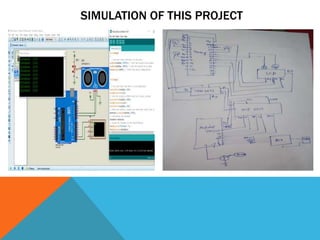
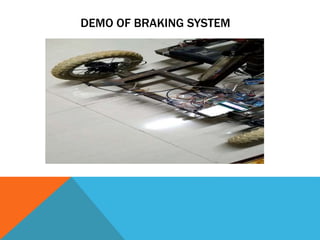
This document describes a vehicle speed control and accident avoidance system based on an ARM M4 microprocessor. The system uses ultrasonic sensors to detect obstacles in front of and behind a vehicle. It is designed to automatically control vehicle speed and brake to avoid accidents at high speeds. The system was simulated, implemented on a prototype vehicle using a ARM M4 processor, ultrasonic sensors, LCD display, buzzer, and braking system. It was able to detect obstacles and smoothly apply the brakes. The system aims to save pedestrians' lives. Future work may include improving the braking algorithm, using higher range sensors, and modifying the vehicle.



![REFERENCES
[1] T.V. A. Nagendra Kumar, A. Murali, “Vehicle Automation and Accident Alert
System using Control Area Network”, International Journal of Applied
Sciences, Engineering and Management,vol.06,no.01,January,pp.06-10,2017.
[2]. Prof.A. Kale, K. Sankpal, S. Katore, Y. Pise,“Accident Avoidance System with
CAN”, International Journa lof Advanced Research in Electrical, Electronics
and Instrumentation Engineering,vol.07,no.5,May,pp.2350-2356,2018.
[3]. Li,M.,Design of embedded Remote temperature Monitoring system based on
Advanced RISC Machine , electronis electric,06 ,p,273, 2009.
[4]. Kumar,M.A.verma,and A srividya, response-tie “Modelling of controller area
network(CAN). distributed computing and networking lecture notes in
computer science volume 5408,p 163-174,2009.
[5]. Tindell,k,A Burns and A,J.wellings,calculating controller area network(CAN)
message response times.control engineering practice,3(8); P,1163-
1169,2005.
[6]. Wilfied Voss,A comprehensive guide to controller area network, copperhill
Media corporation,2005-2008.
[7]. I. Broster and A. Burns. “An Analysable Bus-Guardian for Event-Triggered
Communication”. In Proceedings of the 24thReal-time Systems Symposium,
pp.410-419, IEEE Computer Society Press, December 2003.](https://image.slidesharecdn.com/finalpresentationslide-200706110443/85/VEHICLE-SPEED-CONTROL-AND-ACCIDENT-AVOIDANCE-SYSTEM-BASED-ON-ARM-M4-MICROPROCESSOR-13-320.jpg)