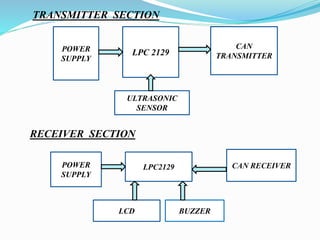
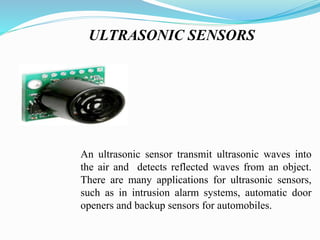
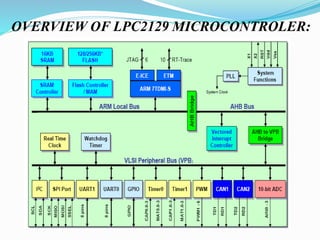
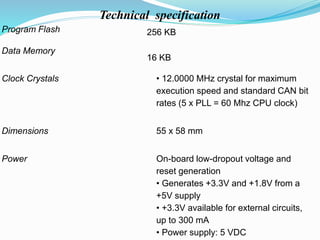
This document describes the design of a CAN-based accident avoidance system for vehicles. It uses ultrasonic sensors to detect objects and the LPC2129 microcontroller to process sensor readings and transmit data via CAN protocol. If an obstacle is detected, the system will trigger alarms and automatically apply emergency braking to prevent accidents. The system is intended to increase road safety by warning distracted drivers or taking evasive action if drivers cannot respond in time to potential collisions.