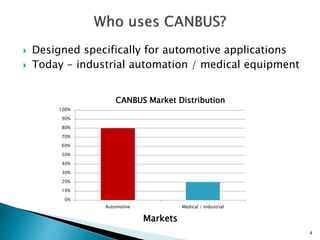
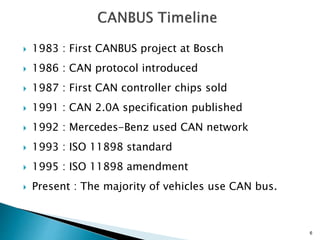
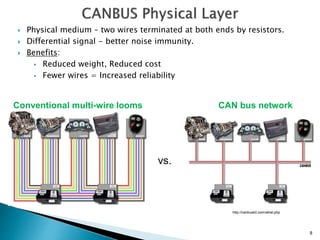
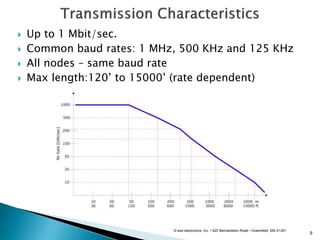
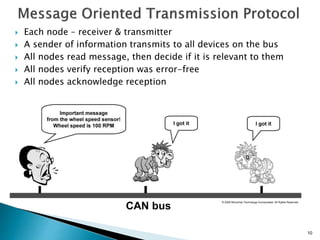
CANBUS is a serial bus system used primarily in automobiles to allow microcontrollers to communicate with each other over a pair of wires at high speeds with noise immunity. It uses differential signaling and message-based communication with arbitration to ensure only one node transmits at a time. Developed in the 1980s by Bosch, CANBUS is now widely adopted in vehicles and other applications like industrial automation and medical equipment to connect electronic control units through a standardized protocol.