Downloaded 76 times


The document discusses Local Interconnect Network (LIN), a simple automotive network protocol that can be used as an economical alternative to CAN bus in some applications. LIN uses inexpensive UART/SCI peripherals and internal oscillators. It has lower data rates and node counts than CAN but provides less error detection. LIN is best for low-speed applications like sensors and small actuators, with a single master and multiple slaves on a bus topology. The protocol uses 6-bit identifiers and 8-byte frames for messaging between nodes and different frame types. Common automotive applications mentioned include sensors, lighting, seating and door controls.
Overview of Local Interconnect Network (LIN) presented by Jabez Winston and Jagadeesh S.
LIN is economical and suitable for automotive applications where CAN is excessive, using UART and internal oscillators.
LIN cannot replace CAN due to lower speeds, less robust error detection, and poorer fault tolerance.
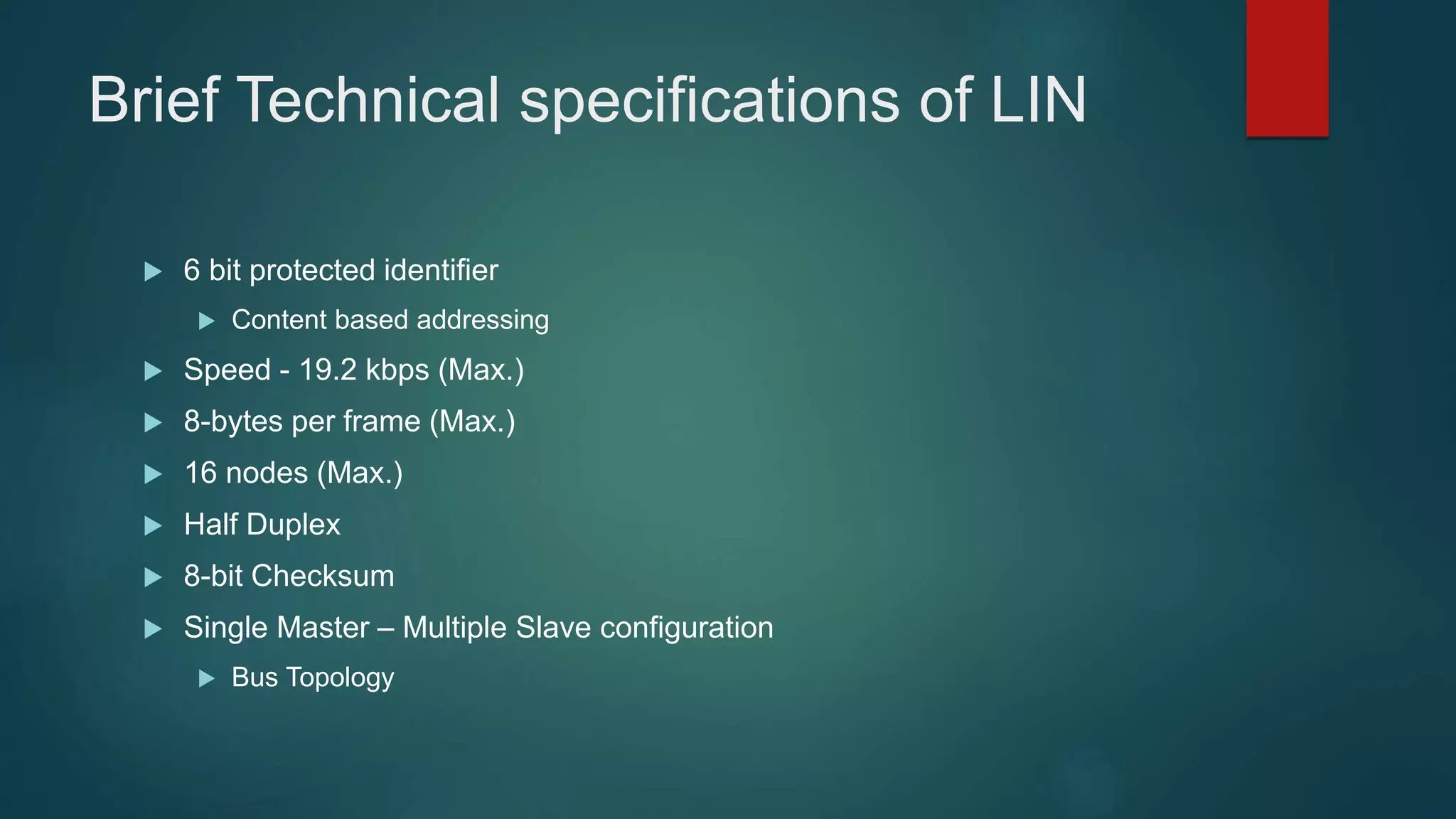
LIN's specifications include 6-bit identifiers, 19.2 kbps speed, 16 nodes, and a half-duplex bus topology.
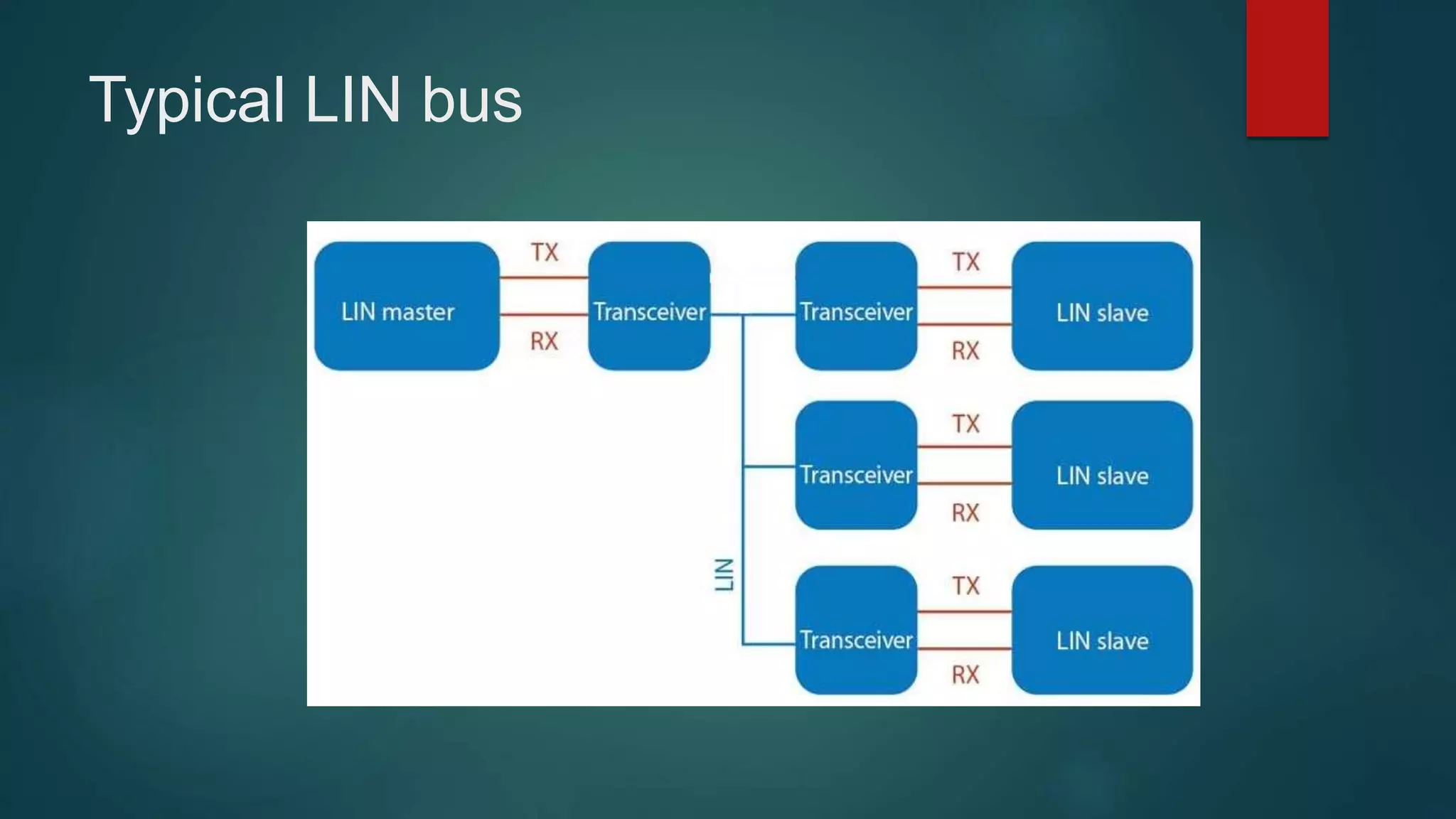
Visual representation of a typical LIN bus wiring and configuration.
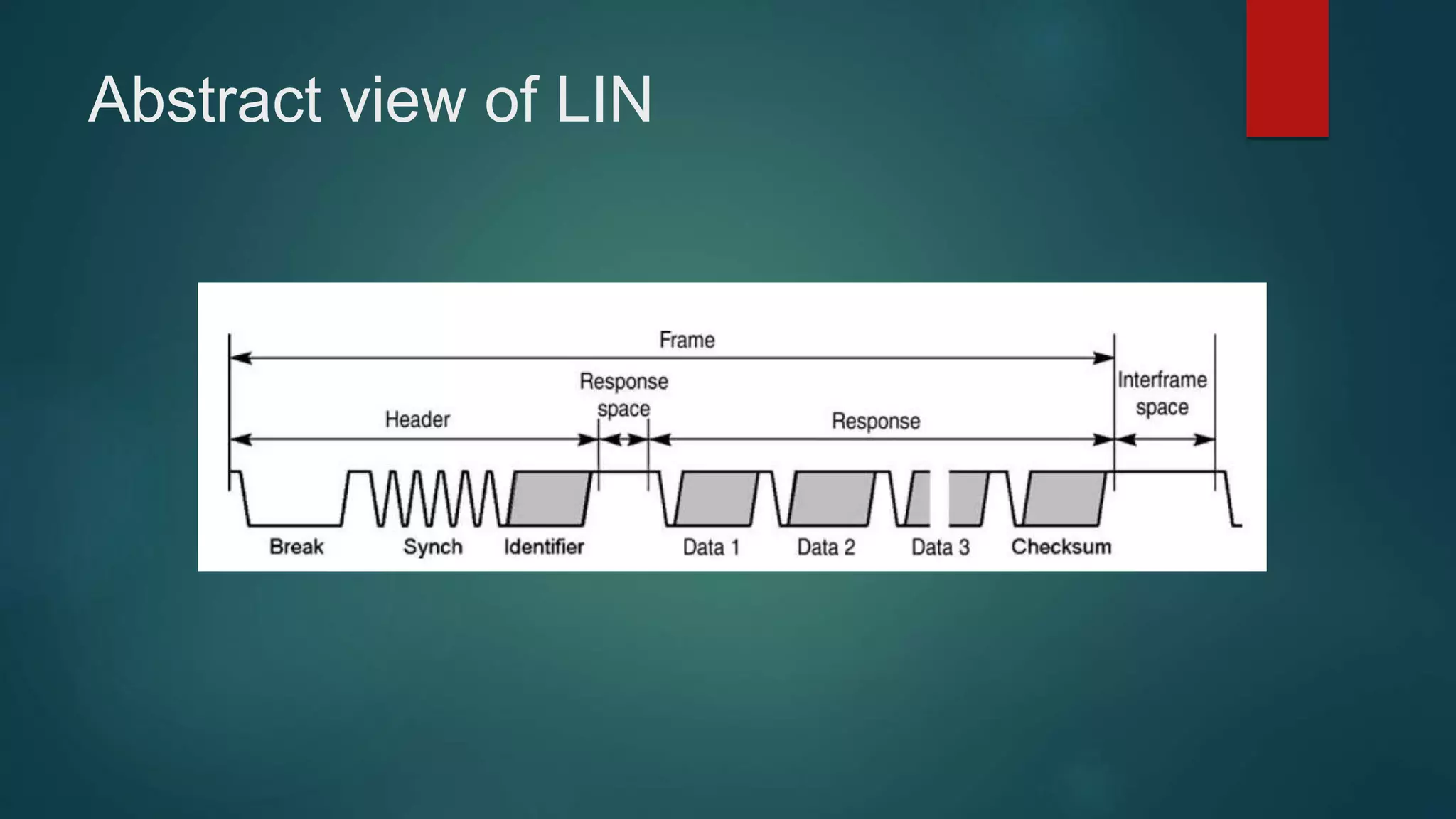
An outline of LIN message structure, including 6-bit message IDs and master-slave communication.
Further specifications on LIN's operational setup and message structure for programming context.
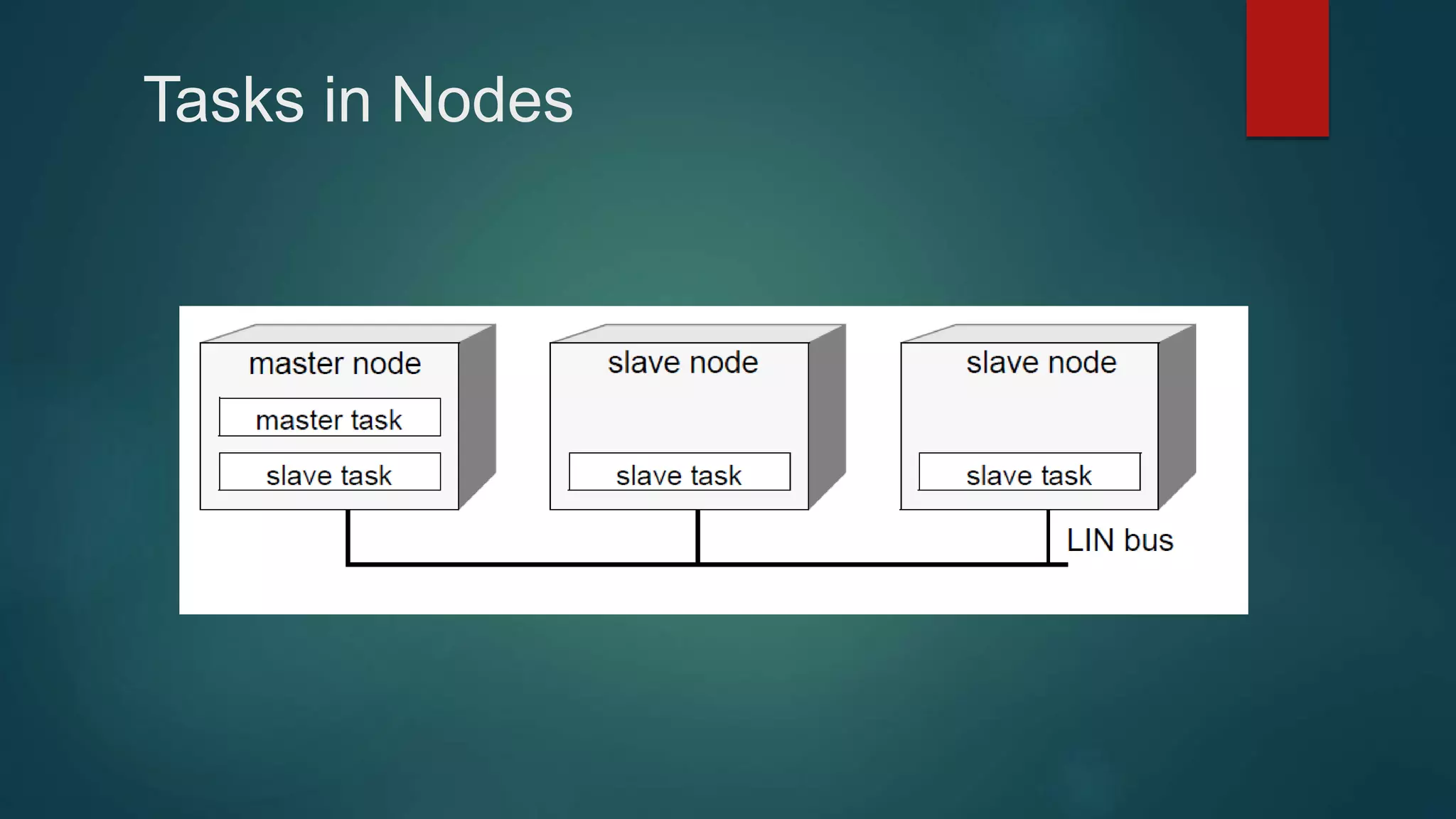
Describes tasks and roles assigned to various nodes within the LIN network.
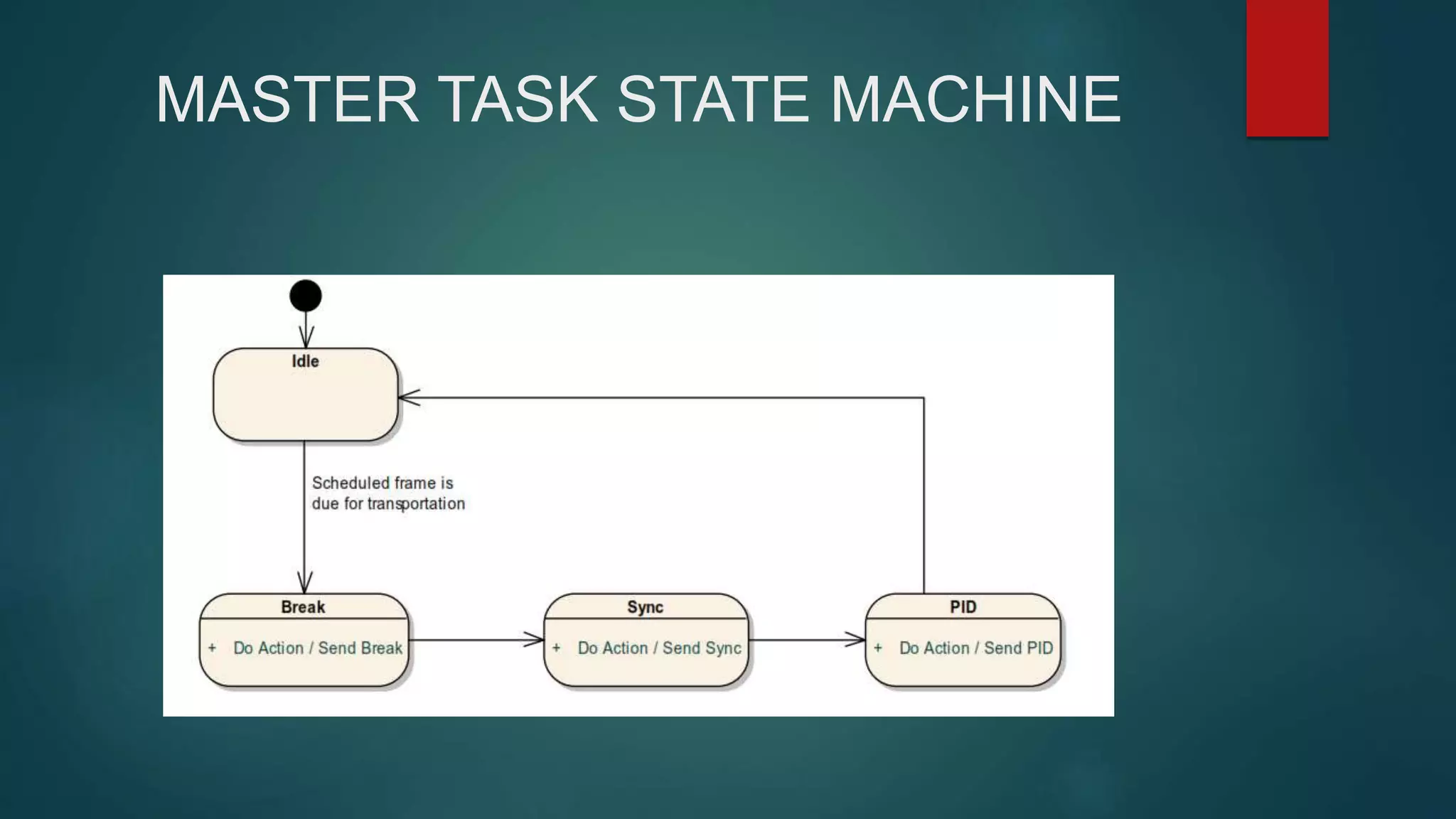
A detailed overview of the state machine governing the tasks of the master node in LIN.
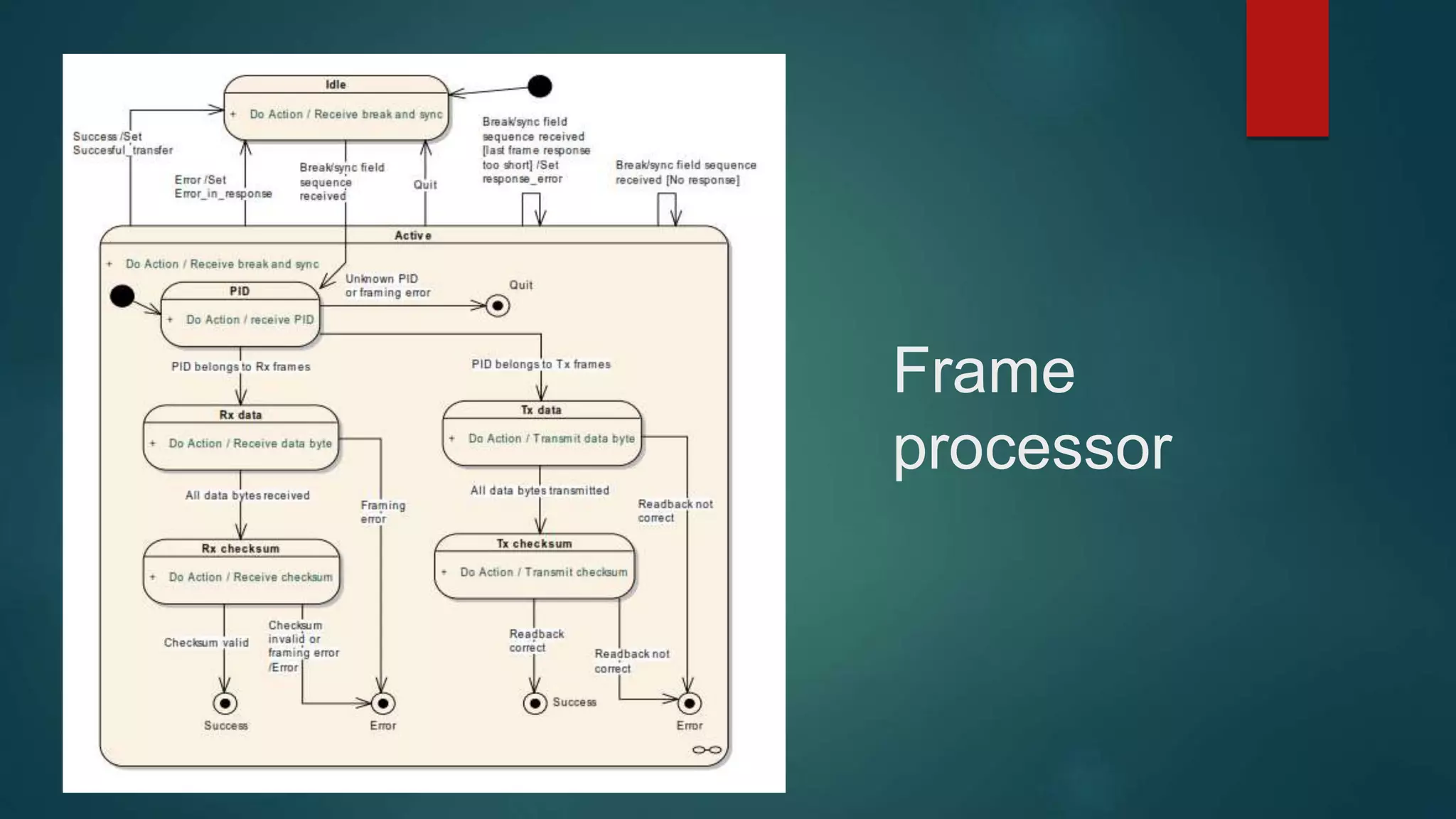
Overview of frame processing mechanisms within the LIN protocol.
Different LIN frame types such as unconditional, event-triggered, and diagnostic frames.
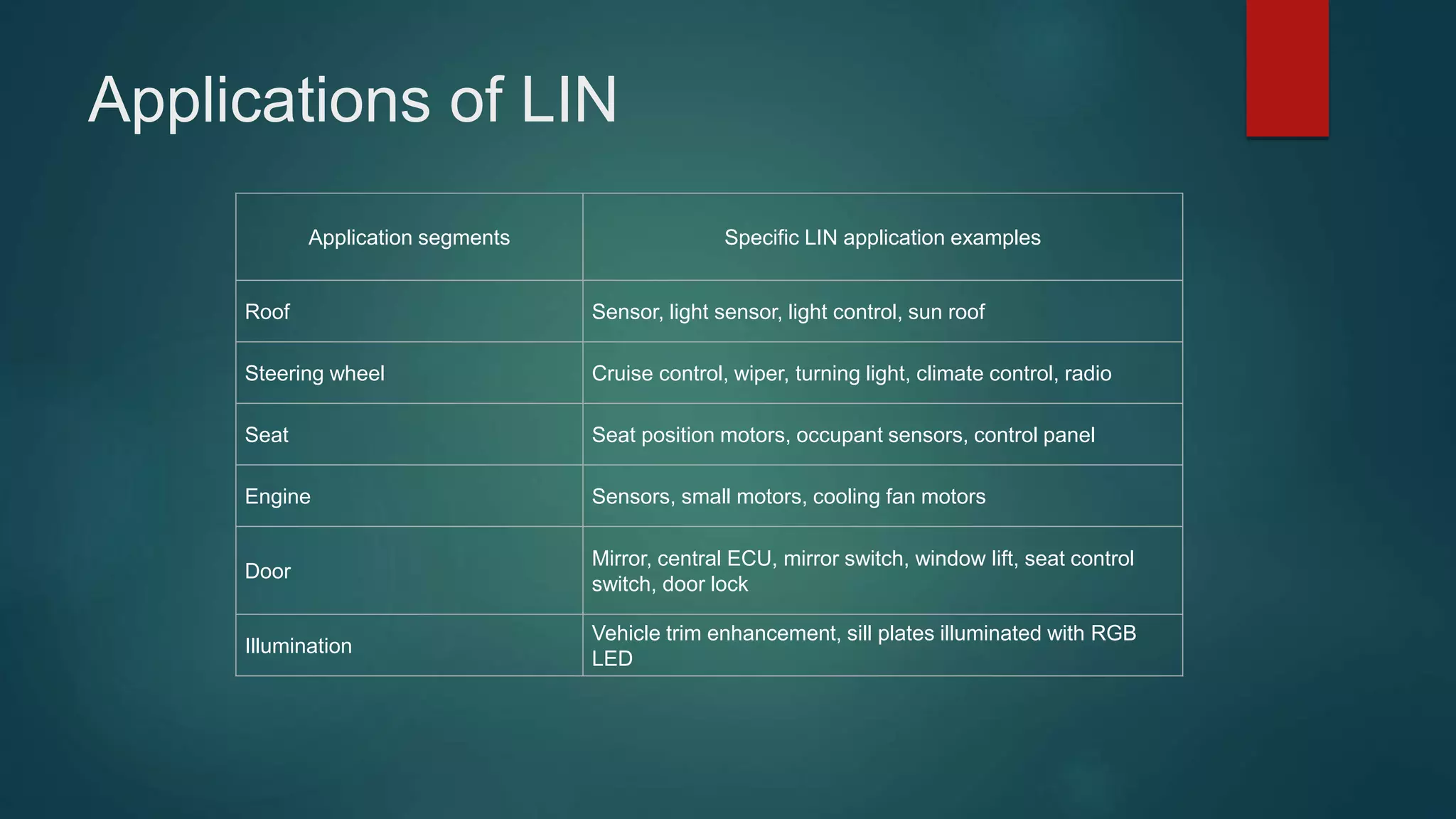
Various applications of LIN in automobiles, including sensors and control mechanisms across vehicle systems.
Provides web references for further reading on Local Interconnect Network and related technology.