Downloaded 30 times

![References
[1] Othman, H.F.; Aji, Y.R.; Fakhreddin, F.T.; Al-Ali, A.R. Controller
Area Networks: Evolution and Applications, 2nd Information and
Communication Technologies, 2006,vol. 2, pp. 3088 - 3093.
[2] Robert Bosch GmbH, “CAN Specification”, Version 2.0, 1991.
[3] Pazul, K. Controller Area Network (CAN) Basics, Microchip
Technology Inc, 1999.
[4] Steve Corrigan, Introduction to the Controller Area Network
(CAN), Texas Instrument, Application Report, 2008.
[5] Controller Area Network (CAN), LAN in vehicle communications
protocol, SAE JI583 Mar90, SEA Information Report, pg, 20, 226-248
6/10/2015 CAN (Controller Area Network) Protocol 19](https://image.slidesharecdn.com/canppt-160402150850/85/Ca-npp-t-19-320.jpg)

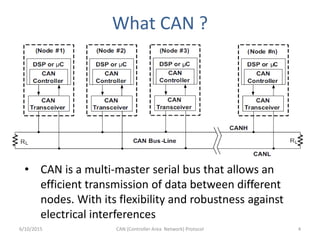
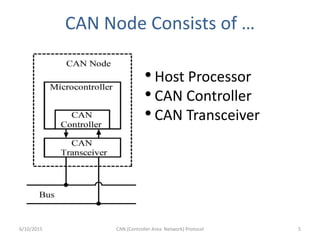
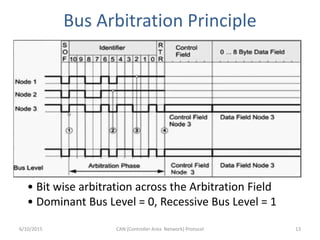
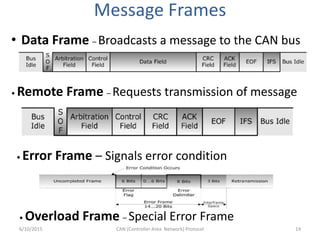
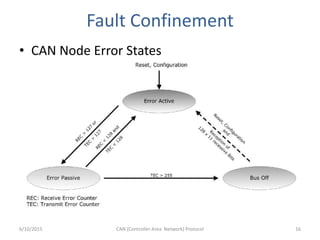
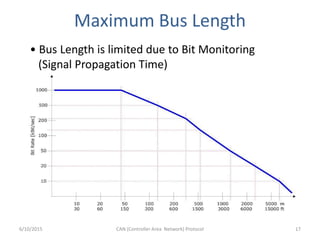
The document is a technical seminar presentation on the Controller Area Network (CAN) protocol, covering its definition, applications, message formats, error handling, and fault confinement. CAN is a multi-master serial bus designed for efficient data transmission in various industries, particularly automotive and automation applications. The presentation also emphasizes CAN's reliability and robustness, making it suitable for environments requiring system-wide data consistency.






















































































